
Disentangling Cognitive and Constructivist Aspects of Hierarchies
Stefano Bennati
SOMS Group, ETH Zurich, Clausiusstraße 50, Z
¨
urich, Switzerland
1 RESEARCH PROBLEM
One of the most puzzling problems in the social sci-
ences is the emergence of social institutions. The field
of sociology is trying to understand why our society
is the way we know it and whether an alternative, pos-
sibly better, society would be possible.
One of the fundamental questions is the emer-
gence of hierarchies. On the one hand the cognitive
approach suggests that hierarchies are encoded in hu-
man nature, therefore are the most natural form of or-
ganization; on the other hand the constructivist ap-
proach sees hierarchies as a product of interactions
between individuals that emerges independently of in-
dividual preferences.
We will investigate under which conditions hierar-
chies emerge from a cognitive factor, a constructivist
factor or a combination of both.
We will study this question both on the analytic
level, with the help of Agent-Based Modeling, and
on the empirical level by running sociological experi-
ments in our laboratory.
2 OUTLINE OF OBJECTIVES
The main objective is to understand what are the pro-
cesses that favor hierarchies in our society. Quoting
Herbert Simon (Simon, 1977):
It is a commonplace observation that nature
loves hierarchies.
One could think that we are naturally biased towards
preferring hierarchies because of physiological fac-
tors such as the structure of the brain. We know that
some regions of the brain are specialized for a specific
function (e.g. speech processing, vision, etc.) (Lash-
ley, 1929) but it is not clear how they are organized
and interact to produce the Mind. If there were evi-
dence for a hierarchical structure of the brain, for ex-
ample a “controller” zone that coordinates the func-
tioning of the other zones, one could speculate that
preference for hierarchies emerges from human na-
ture (Damasio, 1999).
Neural networks are a sophisticated computa-
tional model inspired by the brain so they are a good
place to start looking for evidence of hierarchical or-
ganization. Once we get results on this fundamental
puzzle, we can extend our findings from the neural
network to society and produce hypotheses to be ana-
lyzed by means of agent based simulations and tested
in a laboratory setting.
3 STATE OF THE ART
Despite the intensive research in this direction, under-
standing the emergence of hierarchies and the reasons
for their diffusion is still an open problem: research
shows that hierarchies help to solve the coordination
problem, collaboration problem or both (Halevy et al.,
2011). Traditional mathematical models of society
describe it in a top-down fashion, although helping to
understand why hierarchies are useful they cannot ex-
plain why hierarchies are there in the first place, why
would individuals voluntarily delegate their decisions
to a leader.
In contrast the bottom-up approach of Agent-
Based Models (Axelrod, 1980) tackles the problem
from the individual’s perspective and tries to explain
social institutions as an emergent phenomenon from
interactions between individuals. Bottom-up analyt-
ical models have been used to study the conditions
that favor hierarchy over egalitarian society (Gould,
2002). The limitation of this research is in the as-
sumptions: agents are either assumed to be specimens
of the perfect individualist “Homo Economicus” or
other-regarding and empathetic “Homo Socialis”.
These assumptions are usually arbitrary so the
models are not able to explain why would people de-
velop other regarding preferences in the first place.
Quoting Axelrod (Axelrod, 1997):
But if the goal is to deepen our understanding
of some fundamental process then simplicity
of the assumptions is important and realistic
representation of all the details of a particular
setting is not.
10
Bennati S..
Disentangling Cognitive and Constructivist Aspects of Hierarchies.
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
Our model will keep the bottom-up approach -
without which emergent phenomena cannot be under-
stood - and take advantage of the power of agent based
modeling but it will differ from previous attempts e.g.
(Helbing and Yu, 2009) by taking into consideration
not only interactions between arbitrary agents, but
also evolutionary, cognitive and social processes that
shape the agents. We will model our agents by means
of neural networks (NN), a powerful Machine Learn-
ing tool, inspired by biological nerve systems. Neural
networks are Turing complete (Siegelmann and Son-
tag, 1991) (Siegelmann and Sontag, 1995) so they can
learn any function starting from a random - unbiased -
initial configuration. NNs are composed by intercon-
nected neurons that implement a function and respond
to inputs according to it, while weights of connections
between neurons define how the network responds to
inputs.
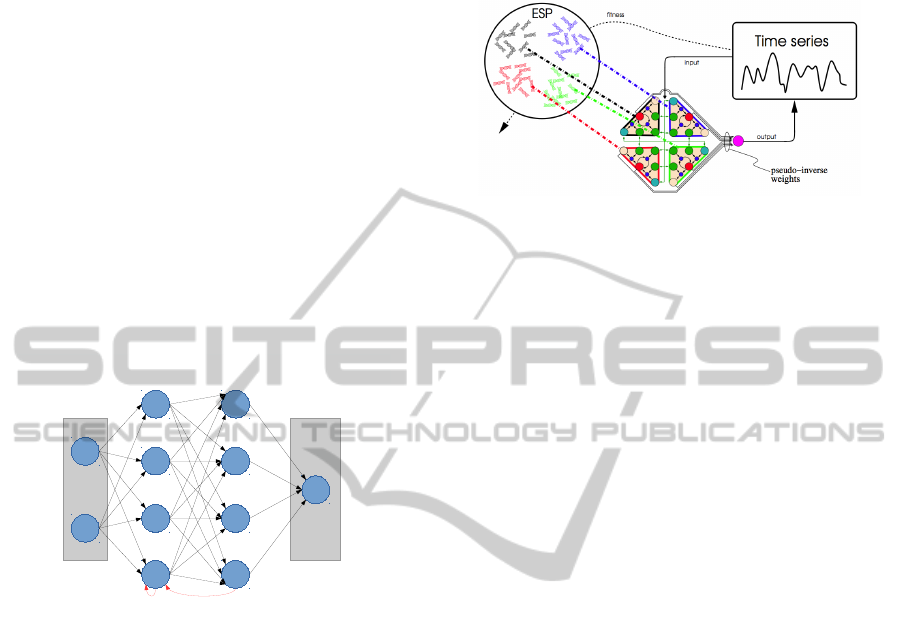
Input layer
Output layer
Hidden layer
■Recurrent connections
Figure 1: An example of neural network with two inputs
and one output. This is a recurrent neural network because
it has recurrent connections.
NNs can be trained to perform any task by present-
ing them examples and letting them adjust the con-
nection weights; the difference between produced and
expected output is propagated through the network
and weights are adjusted in order to minimize it. The
weights of a trained network are the product of sim-
ple learning rules applied on a series of input patterns,
so they are an “emergent feature” of the trained net-
work (Pessa, 2009). The use of NNs in simulations of
society is not unprecedented: i.e. Duong et al. used
Feed-forward NNs to study emergence of stereotypes
(Duong and Reilly, 1995).
Feed-forward NNs are the simplest type of net-
work, where inter-neuron connection cannot form di-
rected cycles: information flows linearly from the in-
put to the output, self- and backward connections be-
tween neurons are not allowed. In our simulation we
will use Recurrent NNs instead, which allow for di-
rected cycles and more sophisticated training mech-
anisms. The advantage of Recurrent NNs is that
they can have memory, therefore can solve problems
that Feed-Forward NNs cannot solve (Schmidhuber,
1990).
Figure 2: Network divided into subpopulation. Each sub-
population co-evolves by Enforced SubPopulation (ESP) to
specialize in a specific sub-function. Courtesy of (Schmid-
huber et al., 2007).
In particular we will use the Evolino framework
(Schmidhuber et al., 2007) to train our agents. The
idea behind Evolino is that most problems can be
decomposed into a linear part and few non-linear
components. Optimal linear methods such as linear
regression are not able to deal with non-linearities
but perform much better on the linear part than sub-
optimal non-linear methods, Evolino solves this is-
sue by combining analytical linear methods and neu-
roevolution: the Enforced SubPopulation (ESP) neu-
roevolution method (Figure 2) coevolves subpopula-
tions of neurons to accelerate the specialization of
neurons into sub-functions. Subdividing neurons al-
lows for specialization because intra-population mat-
ing is not allowed so each subpopulation evolves in-
dependently. Populations of neurons specializing in
subtasks is something that is also found in nature, in
fact our cortex is divided in spatially-contiguous re-
gions that perform a specific task, such as vision or
language processing (Lashley, 1929). This special-
ization has an interesting parallel with the concept of
“Division of Labour” proposed by Adam Smith: pro-
ductivity is increased if cooperating individuals spe-
cialize each in a specific task.
Recent research showed that hierarchical neural
network perform better than an equivalent fully con-
nected network on a sequence of movement tasks as
different timescales emerge in the different parts of
the hierarchical networks, suggesting that the upper
level exerts open-loop top-down control on the lower
level (Paine and Tani, 2005). Moreover they find that
the same timescales emerge in the fully connected
network as well, although the topology of the network
does not evolve to replicate the hierarchical structure,
leading to a lower performance; they attribute this
failure to the excessive size of the weight space.
DisentanglingCognitiveandConstructivistAspectsofHierarchies
11

4 METHODOLOGY
The incremental structure and the long term goals of
the project allow for breaking up work in subprojects
that build up on one another’s results. The first sub-
project describes the near-term goal of finding under
which conditions neural networks self-organize in a
hierarchical fashion, according to what the cognitive
approach claims. Subprojects two and three define the
medium- and long-term goals that extend the scope of
the project to societies of agents. The former will al-
low us to study the impact of the constructivist factor
on the creation of hierarchies, the latter is a combina-
tion of the two previous experiments that will help us
finding how the two factors coexist.
4.1 Subproject 1
Starting from the results in (Paine and Tani, 2005)
we want to study whether hierarchies are an emergent
properties of networks. The factor that in the original
paper didn’t allow a hierarchical topology to emerge
was the weight space, to keep it limited we would
have to decrease the number of nodes in the networks,
although having only few neurons has a negative im-
pact on performance. A way to keep the number of
connections low and allow for good performance is to
abstract the concept of network and create a meta neu-
ral network (MetaNN), a fully connected NN where
nodes are networks instead of neurons: each node is
a fully connected neural network and between each
pair of nodes there is a bottleneck, one input and one
output connection, exactly as in the original paper.
4.2 Experiment
To understand the organization of NNs we need to
have access to the structure of the network (i.e. the
connection weights). The main disadvantages of NNs
is that it is very difficult to understand what the net-
work is actually doing because of the unpredictable
modifications of weights and of the high number of
connections between the neurons. For this reasons
NNs are usually trained on a specific task and treated
as black boxes.
To walk around this problem we will generate a
meta neural network: a NN whose nodes are them-
selves full fledged NNs, this means that the func-
tion that nodes implement is not a static step func-
tion but changes over time. The drawback is that
nodes have to be trained one by one, refer to section
4.2.2 for details on the training. Like in a normal NN
the inter-node connection weights represent interac-
tion between nodes, so a MetaNN can be trained and
tested exactly like a normal NN. The advantage of this
approach over a single network with the same total
amount of neurons is that it can be inspected much
easier: we will consider only inter-node connections
which are in the order of the number of nodes, instead
of being in the order of neurons, and derive conclu-
sion on the organization of the network from their
values. By doing so we assume that each node spe-
cializes in a subfunction, in agreement with the or-
ganization of the brain, and they somehow need to
coordinate and merge their outputs together.
4.2.1 Task
Evolino divides the NN in subpopulations to accel-
erate specialization in subproblems and increase effi-
ciency, the same is true for the brain. For this reason
we expect the MetaNN to do the same: each node
would specialize in a specific subtask. Subtasks can
be more or less self contained and independent, de-
pending on the task.
To make our analysis easier, we will ask the NN
to solve a classification problem and perform differ-
ent independent subtasks: algebraic operations of two
numbers, driven by an input value that specifies what
operation should be executed. We would expect each
NN to specialize in one of the subtasks and one doing
the classification. This will speak for a hierarchical
organization with a master node doing classification
and asking another node to perform the operation it is
specialized in. For a different task where subproblems
are not so well defined, we might expect the network
to process in a more distributed way, without hierar-
chies.
We can infer what type of organization was
learned by the network by looking at the interconnec-
tion weights:
• If only one node has a positive weight with the
input but weigh 0 to the output, we can assume
that it is doing the classification and instructing
the other networks.
• If interconnection weights are 0 and every node
has positive weights for inputs and outputs, we
can assume that each node is computing the full
problem by itself.
• If interconnection, as well as input and output
weights are positive we can assume that the com-
putation is done in a collaborative way.
In certain circumstances it could be useful, for the
sake of understanding the contribution of each com-
ponent, to disassemble the MetaNN and test each
node singularly on a set of inputs to infer what func-
tion it is implementing.
ICAART2015-DoctoralConsortium
12

4.2.2 Design
Figure 3: Structure of a meta neural network. Each node
implements a neural network.
To avoid biasing the network towards hierarchy we
will design it to have a symmetrical structure where
nodes have all the same characteristics, we will intro-
duce an input layer that forwards all inputs to each
node and an output layer that averages the output of
every node, weighted on the connection strength of
the output link.
To allow for hierarchies to develop our MetaNN
should have at least one node per operation plus one
node for the classification, a smaller network size
might not allow this specialization to happen. The
hidden layer is composed by the nodes, each of which
is a NN, and is fully connected: each node in the hid-
den layer has inputs coming from all other nodes and
its output is fed into all other nodes. The size of the
nodes should not have a big impact on the quality of
the results, having bigger nodes might improve the
quality of the output and the convergence time. Con-
nections weights are initially random and are adapted
through backpropagation.
The error is fed back to the backpropagation sys-
tem of the MetaNN as well as to the backpropaga-
tion system of each node. Errors propagated to the
MetaNN and to the nodes do not necessarily have to
be the same, each node could have an error being the
linear combination of the global error and the node’s
local error, computed with a special function that re-
wards positively the node if it computes one subtask.
Backpropagating the global error to the single
neurons could be important to avoid oscillatory out-
put, due to maximizing two independent functions at
the local and global level. On the other hand the local
error is useful to help nodes differentiate their output
and specialize in a subtask. We will try different com-
binations of the two to find out what influence both
errors have on the performance of the node and of the
network.
We also believe that different timescales are a
common denominator of many emergent systems in
nature (Lemke, 2000) and they will help our network
show emergent behavior. We will implement differ-
ent time scales for training the nodes: for a certain
number of iterations the nodes will be trained over
their local error, based on their own output, in this
phase each node will train towards the common goal.
The second phase consists in training each node on
the global error, based on the MetaNN’s output that
combines all outputs produced by the nodes. In this
phase the nodes will be trained to work as a team, in-
centivizing specialization.
We expect that alternating local and global error
will speed up convergence and help the network get
out of local minima by cyclically reducing the dis-
tance between the state of each node, but at the same
time fostering diversity and specialization.
We will try different combination of global and lo-
cal error and values of timescale and study for which
values the convergence time and error of the network
are optimal.
4.3 Subproject 2
Typical simulations of society are designed as many
agents that are able to interact with the environment
and with their neighboring agents. This configuration
can be replicated in a NN by assuming that nodes are
agents: nodes receive input from outside the network
- the environment - and produce output on which they
are evaluated. They also interact with other nodes
through inter-node connections whose weights deter-
mine the strength of the interaction - connections to-
wards non neighboring nodes will have null weight.
We will modify the setting described in section
4.1 and adapt it to a bigger simulation where sev-
eral agents are interacting with the environment and
with other agents, such a design could be easily im-
plemented in our framework by creating a new layer,
a Meta-MetaNN, where nodes (agents) are MetaNNs.
Typical settings allow agents to relocate and obtain a
new set of neighbors, in our case that translates into
changing the connection weights. We will also vary
the environment configuration and payoffs to study
the dynamics of the system and the emergence of so-
cial institutions.
DisentanglingCognitiveandConstructivistAspectsofHierarchies
13

4.4 Subproject 3
We will study more in detail the influence of social in-
teractions in the emergence of hierarchies by creating
isolated societies and varying the number and strength
of the connections between them. We are planning
on running a distributed simulation in our cluster to
support a higher number of agents. We hope to find
correlation between the interconnectivity of popula-
tion and changes in their organization. From these
findings we will formulate hypotheses and design a
laboratory experiment to test them, one possible do-
main of application could be opinion dynamics and
voting. This simulation will be the backbone for a se-
ries of future studies: i.e. one interesting issue that
we want to investigate is how agent complexity in-
fluences model predictions. Previous studies (Axtell
et al., 2000) shown the emergence of stereotypes by
mean of a simple Agent-Based simulation. We will
replicate their simulation with our framework and test
whether above a certain threshold of complexity this
result is not valid anymore.
5 EXPECTED OUTCOME
With this simulation we expect to find evidence for
both a hierarchical and a distributed organization of
the network. We expect not to find evidence for a non
collaborative organization.
We will identify what are the situations and tasks
that favor one or the other organization and look for
parallels in the society.
We will implement a high scale simulation of so-
ciety based on MetaNNs and use it to study emergent
properties of the networks, we expect to find the same
properties also at the level of society.
REFERENCES
Axelrod, R. (1980). Effective choice in the prisoner’s
dilemma. Journal of conflict resolution, 24(1):3–25.
Axelrod, R. M. (1997). The complexity of cooperation:
Agent-based models of competition and collaboration.
Princeton University Press.
Axtell, R., Epstein, J. M., and Young, H. P. (2000).
The emergence of classes in a multi-agent bargaining
model.
Damasio, A. R. (1999). How the brain creates the mind.
SCIENTIFIC AMERICAN-AMERICAN EDITION-,
281:112–117.
Duong, D. V. and Reilly, K. D. (1995). A system of iac
neural networks as the basis for self-organization in a
sociological dynamical system simulation. Behavioral
science, 40(4):275–303.
Gould, R. V. (2002). The origins of status hierarchies: A
formal theory and empirical test1. American journal
of sociology, 107(5):1143–1178.
Halevy, N., Chou, E. Y., and Galinsky, A. D. (2011). A
functional model of hierarchy why, how, and when
vertical differentiation enhances group performance.
Organizational Psychology Review, 1(1):32–52.
Helbing, D. and Yu, W. (2009). The outbreak of cooperation
among success-driven individuals under noisy condi-
tions. Proceedings of the National Academy of Sci-
ences, 106(10):3680–3685.
Lashley, K. S. (1929). Brain mechanisms and intelligence:
A quantitative study of injuries to the brain.
Lemke, J. L. (2000). Across the scales of time: Artifacts,
activities, and meanings in ecosocial systems. Mind,
culture, and activity, 7(4):273–290.
Paine, R. W. and Tani, J. (2005). How hierarchical control
self-organizes in artificial adaptive systems. Adaptive
Behavior, 13(3):211–225.
Pessa, E. (2009). Self-organization and emergence in neural
networks. Electronic Journal of Theoretical Physics,
6(20):269–306.
Schmidhuber, J. (1990). Dynamische neuronale Netze und
das fundamentale raumzeitliche Lernproblem.
Schmidhuber, J., Wierstra, D., Gagliolo, M., and Gomez, F.
(2007). Training recurrent networks by evolino. Neu-
ral computation, 19(3):757–779.
Siegelmann, H. T. and Sontag, E. D. (1991). Turing com-
putability with neural nets. Applied Mathematics Let-
ters, 4(6):77–80.
Siegelmann, H. T. and Sontag, E. D. (1995). On the com-
putational power of neural nets. Journal of computer
and system sciences, 50(1):132–150.
Simon, H. A. (1977). The organization of complex systems.
In Models of Discovery, pages 245–261. Springer.
STAGE OF THE RESEARCH
Research is still at an early stage, we are developing
the simulation environment, running the first simula-
tion and collecting the first data
ICAART2015-DoctoralConsortium
14
