
Alternative Approaches to Planning
Otakar Trunda
Department of Theoretical Computer Science and Mathematical Logic,
Charles University in Prague, Prague, Czech Republic
1 INTRODUCTION
In my PhD. dissertation, I focus on action plan-
ning and constrained discrete optimization. I try to
introduce novel approaches to the field of single-
agent planning by combining standard techniques
with meta-heuristic optimization, machine-learning
algorithms, hyper-heuristics and algorithm selection
approaches.
Our main goal is to create new and flexible plan-
ning algorithms which would be suited for a large va-
riety of real-life problems. Planning is a fundamen-
tal and difficult problem in AI and any new results in
this area are directly applicable to many other fields.
They can be used for single-agent or multi-agent ac-
tion selection in both competitive or cooperative en-
vironment and as we focus on optimization, our tech-
niques are suitable for real-life problems that arise in
robotics or transportation.
2 BACKGROUND
In this section, we provide a brief description of no-
tions and research topics that we refer to later in the
paper.
2.1 Planning
Planning deals with problems of selection and
causally ordering of actions to achieve a given goal
from a known initial situation. Planning algorithms
assume a description of possible actions and at-
tributes of the world states in some modelling lan-
guage such as Planning Domain Description Lan-
guage (PDDL) as its input. This makes the plan-
ning algorithms general and applicable to any plan-
ning problem starting from building blocks to tow-
ers and finishing with planning transport of goods be-
tween warehouses (Ghallab et al., 2004).
A state which satisfies the goal condition is called
a goal state, a sequence of actions (a
1
, ..., a
n
) is called
a plan, if executing these actions one by one starting
in the initial state leads to some goal state.
There are two different kinds of planning tasks - in
the satisficing planning, we are interested in finding
just any plan, while in the optimization planning we
want to find a plan which minimizes given objective
function.
In the satisficing planning, however, we still con-
sider some solutions to be better than others, we pre-
fer shorter plans. An example of a satisficing planning
task might be a Sokoban problem or a Rubik’s cube.
Finding even suboptimal solutions in these domains
is difficult (at least for large instances).
The typical representatives of an optimization
planning are transportation problems, where the task
is to deliver some goods to specific locations and min-
imize the time requirement and fuel consumption.
2.2 Meta-heuristics
Meta-heuristics (or Modern heuristics) are optimiza-
tion algorithms that don’t guarantee finding optimal
solutions, but can often find high-quality solutions
with reasonable search effort (Rothlauf, 2011). Ex-
amples of popular meta-heuristics are Genetic Al-
gorithms, Particle Swarm Optimization, Ant Colony
Optimization, Simulated Annealing, and others.
These techniques can be divided into two groups
according to the type of search space. Particle Swarm
Optimization or Simulated Annealing usually work
on continuous space, while Ant Colony Optimization
works on discrete space. Genetic Algorithms are very
general and are able to work on both continuous and
discrete search spaces.
The search space of planning problems is inher-
ently discrete, so we are interested in algorithms that
can handle discrete structures. Commonly used struc-
tures are graphs, set of permutations, or in case of
planning - set of finite sequences of actions.
25
Trunda O..
Alternative Approaches to Planning.
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
2.3 Monte Carlo Tree Search
Monte Carlo Tree Search (MCTS) is a stochastic opti-
mization algorithm that combines classical tree search
with random sampling of the search space. The algo-
rithm was originally used in the field of game playing
where it became very popular, especially for games
Go and Hex. A single player variant has been devel-
oped by Schadd et al. (Schadd et al., 2008) which is
designed specifically for single-player games and can
also be applied to optimization problems. The MCTS
algorithm successively builds an asymmetric tree to
represent the search space by repeatedly performing
the following four steps:
1. Selection – The tree built so far is traversed from
the root to a leaf using some criterion (called tree
policy) to select the most urgent leaf.
2. Expansion – All applicable actions for the se-
lected leaf node are applied and the resulting
states are added to the tree as successors of the
selected node (sometimes different strategies are
used).
3. Simulation – A pseudo-random simulation is run
from the selected node until some final state is
reached (a state that has no successors). During
the simulation the actions are selected by a simu-
lation policy,
4. Update/Back-propagation– The result of the sim-
ulation is propagated back in the tree from the se-
lected node to the root and statistics of the nodes
on this path are updated according to the result.
The core schema of MCTS is shown at Figure 1 from
(Chaslot et al., 2008).
Figure 1: Basic schema of MCTS (Chaslot et al., 2008).
One of the most important parts of the algorithm
is the node selection criterion (a tree policy). It de-
termines which node will be expanded and therefore
it affects the shape of the search tree. The purpose of
the tree policy is to solve the exploration vs. exploita-
tion dilemma.
Commonly used policies are based on a so called
bandit problem and Upper Confidence Bounds for
Trees (Auer et al., 2002; Kocsis and Szepesv´ari, 2006)
which provide a theoretical background to measure
quality of policies. We use standard tree policy for
the single-player variant of MCTS (SP-MCTS) due
to Schadd et al. (Schadd et al., 2008) that is appropri-
ate for planning problems (planning can be seen as a
single-player game where moves correspond to action
selection).
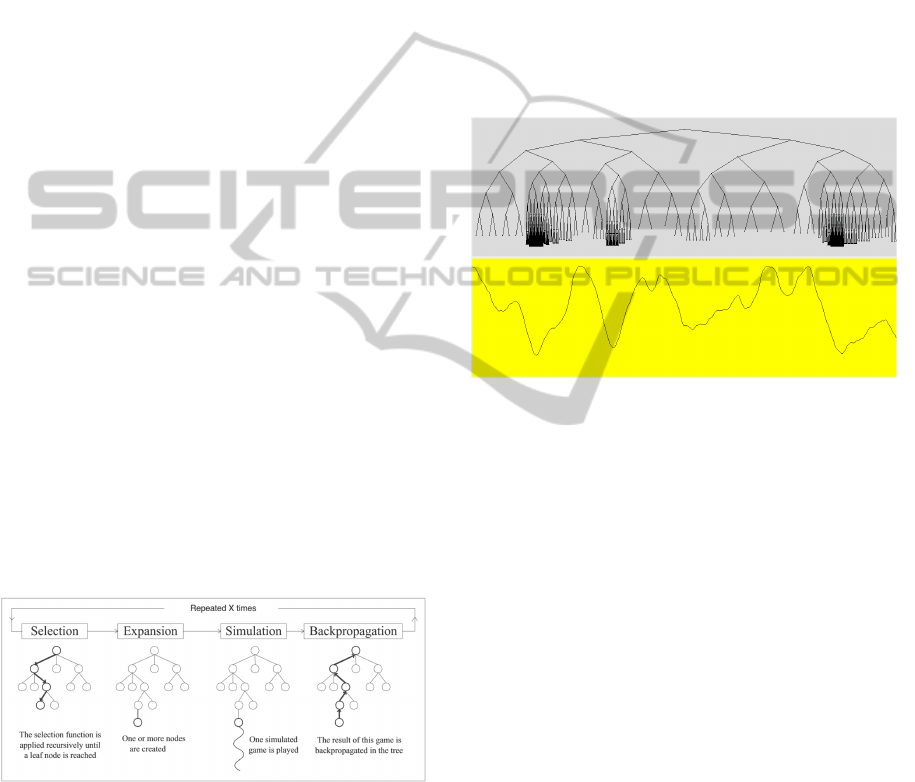
The behaviour of MCTS can be seen on an exam-
ple in figure 2. In the yellow field there is a func-
tion to be minimized and above it there is a tree build
by MCTS algorithm. Function values are used as re-
sults of the simulations. We can see that the algorithm
identifies promising regions and focuses the sampling
on these regions.
Figure 2: Simple example of MCTS tree.
2.4 Algorithm Selection
Algorithm selection is a relatively new field which
deals with the problem of selecting the right algorithm
for specified task. Currently, the research in this area
focuses mostly on selecting classification algorithms.
It has also been used to select search algorithms
for SAT instances, but so far not for planning.
The algorithm selection problem is closely related
to hyper-heuristics and parameter tuning. Hyper-
heuristics search for the best search algorithm for
given problem instance by combining so called low
level heuristics. The motivation behind this idea is
that the human expert uses only intuition when de-
signing for example mutation and recombination op-
erators. Such intuition may or may not be correct
and furthermore different instances may require dif-
ferent setting. Hyper-heuristics search the configu-
ration space automatically and often can find better
solution.
3 MOTIVATION
Currently, the most efficient approach to solve plan-
ning problems is heuristic forward search (mostly
ICAART2015-DoctoralConsortium
26

in the form of A* or Hill-climbing). In the pa-
per (Toropila et al., 2012), we showed that classi-
cal planners are not competitive when solving a real-
life transportation planning problem of the Petrobras
company (Vaquero et al., 2012). The paper proposed
an ad-hoc Monte Carlo Tree Search (MCTS) algo-
rithm that beat the winning classical planner SGPlan
in terms of problems solved and solution quality.
We believe, that there are many more planning do-
mains where the classical planners wouldn’t perform
well and different techniques are needed. Reason for
this is that newly developed planners are tested on do-
mains from the International Planning Competition
(IPC) (Olaya et al., 2014) which focuses on artificial
problems.
There are two main tracks on the IPC
• in the satisficing track, the goal is to find any plan,
but the solution quality is considered in the evalu-
ation. In this track, quite hard problems are used
for the evaluation, problems where just finding
any plan is difficult.
• in the optimal track, the task is to find either a
length-optimal plan (plan with the minimal num-
ber of actions) or a cost-optimal plan which mini-
mizes the sum of actions’ costs. In this track, only
optimal solutions are accepted.
Real-life problems, however, don’t really fit in any
of those categories. Unlike the satisficing track, find-
ing any solution is usually easy in practical problems
and the optimization part is the real issue, but unlike
in the optimal track, we might not want to guarantee
optimality, since it would take too much time.
Consider the following example: the Travelling
Salesman Problem (TSP) can be viewed as a planning
problem, where in the initial state the agent is located
in some virtual location from which it can move to
any city using zero-cost action, then it can travel be-
tween the cities and a goal state is reached when all
the cities have been visited.
Many different techniques has been devised in the
past to solve this problem, most of them are based on
meta-heuristics, which don’tguarantee finding the op-
timal solution, but can find high-quality solutions in a
reasonable time. Classical planner, however, would
use an A* algorithm, which is not well suited for this
problem. (Although this example seems far-fetched,
practically motivated planning domains often involve
some kind of transportation therefore optimization
planning might be close to solving some constrained
version of TSP.)
On the other hand, to optimally solve the previ-
ously mentioned Rubik’s Cube problem, the A* algo-
rithm is a good choice and classical planners would
perform well on this domain.
Furthermore, we have no a priori knowledge about
the shape of the fitness landscape of the problem. As
the PDDL language is very general, it can describe
all kinds of problems. It can be compared to Gen-
eral Game Playing (GGP) (Genesereth et al., 2005) -
a logic-based formalism to describe rules of combina-
torial games like chess, go and others.
Several GGP algorithms exist which take descrip-
tion of a game is their input and are able to play any
game that can be described in GGP. Such GGP play-
ers, however, are far less efficient than engines spe-
cialized to just one game (like chess engines). Do-
main specific engines often use very different algo-
rithms, for example chess engines are based on the
alpha-beta algorithm while the best Go engines use
MCTS.
Obviously, different problems require different
techniques so it is important to select the proper
search algorithm.
To sum up, the current techniques use mostly
A* and its variants and focus on satisficing problem
rather than optimization. Those techniques are quite
rigid as they use the same algorithm on all domains.
Research in this area focuses mostly on developing
new heuristic estimators for A*.
4 STAGE OF THE RESEARCH
In the current stage of our research, we have studied
published approaches and related work and we have
already identified several opportunities where our ap-
proach could improve standard techniques. We have
implemented some of those ideas and published the
results. Since I am currently in the second year of my
PhD. study, I will continue this research at least for
the next two years.
The results we published so far cover these topics
• Solving real-life logistic problem Petrobras by
MCTS (Toropila et al., 2012)
• Generalizing the MCTS approach to solve any lo-
gistic domain (Trunda and Bart´ak, 2013)
• Improving the Red-Black planning heuristic by
machine learning (Trunda and Bart´ak, 2014)
• Automatic creation of pattern databases by meta-
heuristics (Trunda, 2014)
These results deal with specific problems which in
our further work we would like to extend and gener-
alize to wider range of domains.
AlternativeApproachestoPlanning
27

5 OUTLINE OF OBJECTIVES
The main objective of our research is to combine
standard planning algorithms with optimization meta-
heuristics and other techniques of soft-computing.
There are three fundamental ways to do that
1. use meta-heuristics as a preprocessing to improve
the performance of standard techniques.
We have already published two papers that fall
into this category (Trunda and Bart´ak, 2014;
Trunda, 2014) and we believe that there are many
more opportunities to improve standard planners
in this manner.
For example, a Symbolic search algorithm works
with Binary decision diagrams (BDDs) and the ef-
ficiency of this data structure is highly dependent
on the ordering of variables (which is problem-
dependent). Finding some good ordering before
the actual search is a typical example of an opti-
mization preprocessing.
We believe that such optimizations are important
in order to make the planning system flexible, ro-
bust and efficient.
2. use meta-heuristics to solve the planning prob-
lems directly
We already have some experience with using
MCTS for planning (Toropila et al., 2012; Trunda,
2013; Trunda and Bart´ak, 2013). We would like to
work further in this area and also find other tech-
niques that could be used directly for optimization
planning.
This research should shed some light on the prob-
lem of which features of planningdomains are im-
portant in order to select the proper search algo-
rithm.
Since some domains are inherently not suited for
the use of meta-heuristics, an important part of
this task will be to find transformations or refor-
mulations of the problem which would make it
more suitable to optimization algorithms.
3. use meta-heuristics or machine-learning to devise
an algorithm selection technique for planning.
We will analyse this issue later.
6 RESEARCH PROBLEM
In this section, we address possible problems with ac-
complishing the research objectives.
With using meta-heuristics as a preprocessing to
standard techniques, there is an importantissue of dis-
tributing the computation time. Let t be a problem
instance, by time(t, h) we denote the time required to
solve the problem t, where h is some information that
can help us (like what algorithm to use or how to con-
figure it). In the preprocessing phase, we try to find h
which will help us the most. Time to find h we denote
by find(h).
In order for the preprocessing to have any positive
effect, equation 1 has to hold.
find(h) +time(t, h) ≤ time(t, NoHelp) (1)
Techniques used for the preprocessing are usually
anytime, which means that if we let then run longer,
we might get a better solution. Such better solution h
would lead to smaller time(t, h), but if we allocate to
much time for the preprocessing phase, it may not pay
off as the equation 1 might not hold. Furthermore, we
don’t know a priori the value time(t, NoHelp) and it
is not easy to deduce time(t, h) either.
Another problem rises with the need of an evalu-
ation function during the preprocessing phase. Meta-
heuristics work with a population of solutions and use
an evaluation function to distinguish good solutions
from the bad ones. For candidate solutions h
1
and h
2
,
we would like to know time(t, h
1
) and time(t, h
2
) to
evaluate the candidates. Obviously, this is not possi-
ble, since getting these values would require to actu-
ally solve the problem.
For using meta-heuristics to solve the planning
problems directly, there are following issues that need
to be resolved:
• MCTS Simulations
When MCTS selects the most urgent leaf, it starts
a simulation to evaluate that leaf. Such simulation
should lead to some goal state, where the resulting
plan could be evaluated. However, reaching a goal
state from some given initial state is equivalent to
satisficing planning, which is a difficult problem
in general.
We don’t require the simulation to be an opti-
mal plan - suboptimal solutions are completely
sufficient in the simulation phase - but we need
the simulations to be very fast. In other words,
we need means to finding suboptimal plans very
quickly.
• Genetic Algorithms’ crossover Operator
If we used GA for planning, it would operate di-
rectly on the set of plans. During the search, GAs
use crossover operator which takes two candidate
solutions and combines them to produce another
one.
It is, however, difficult to guarantee that two
valid plans will produce a valid plan during the
crossover.
ICAART2015-DoctoralConsortium
28

To sum up, the main research problems we are facing
are:
1. Stopping criterion of the preprocessing
2. Evaluation function for the preprocessing
3. MCTS simulations
4. Search operators that combine valid solutions to
different but still valid solutions
5. Overall design of a hyper-heuristic based planner
7 STATE OF THE ART
We provide an overview of the state of the art to all
previously mentioned research topics.
7.1 Stopping Criterion of the
Preprocessing
Published papers on preprocessing of planning prob-
lems like (Edelkamp, 2006; Haslum et al., 2007) use
very simple stopping criteria - number of steps with-
out improvement or a fixed number of steps. These
techniques don’t concern themselveswith any reason-
ing about proper distribution of computation time ei-
ther.
Matter of designing stopping criteria (or rather
restarting criteria) is studied in the field of evolution-
ary optimization (Solano and Jonyer, 2007). Statis-
tical methods already exist which we believe can be
modified to be used in the preprocessing phase of
planning problems.
7.2 Evaluation Function for the
Preprocessing
Published papers on creation of pattern
databases (Edelkamp, 2006; Haslum et al., 2007)
use various approximations of time(t, h) as a fitness
function. In general, there is a theory of Estimating
search effort which we can use to approximate the
time(t, h) value.
Estimating Search Effort (Korf et al., 2001) tries to
predict how many nodes will A* or IDA* expand be-
fore finding a solution, how manynodes will it expand
in the i-th layer, what the average branching factor is
going to be and so on.
7.3 MCTS Simulations
We described the problem with MCTS simulations in
detail in (Trunda, 2013; Trunda and Bart´ak, 2013).
Simulations work as random samples of the search
space, they should be fast and simple. In typical appli-
cations, they are realized by performing random steps.
In planning, however, performing random actions is
not guaranteed to find a goal state and it’s not even
guaranteed to end.
In this phase, it is possible to make use
of many standard planning techniques, for exam-
ple heuristic estimators. Popular heuristics used
in modern planners cover: Landmark-cut (Pom-
merening and Helmert, 2013), Linear programming-
based heuristics (Pommerening et al., 2014), Pat-
tern databases (Pommerening et al., 2013), Delete re-
laxation (Hoffmann, 2011) and others (Helmert and
Domshlak, 2009).
Several attempts have already been made to use a
random walk-based sampling for planning. The Ar-
vand planner (Nakhost and M¨uller, 2009) proves this
idea to be viable as it performs well on the IPC. Ar-
vand carries out several random walks (with a fixed
length) at the start of the search to find good initial so-
lutions. If this attempt fails, it switches back to stan-
dard A*.
The problem of very fast suboptimal planning was
recently addressed by ICP. The latest IPC introduced
an Agile track, where the solution quality was not con-
sidered at all and the only criterion was the computa-
tion time required to find a plan. Most participating
planners, however, used standard search techniques
only in different configurations and a very few com-
pletely new approaches was introduced.
7.4 Search Operators that Combine
Valid Solutions to Different but Still
Valid Solutions
This problem has been intensively studied in the field
of evolutionary optimization (Simon, 2013) and also
several attempts have been made to use GAs directly
for planning (Westerberg and Levine, 2000; Brie and
Morignot, 2005). Most popular approach to solving
this problem is by post processing - after creating the
new candidate solution, it is checked for validity and
if not valid, it is replaced by the nearest valid solution.
Another way of dealing with this problem is to in-
troduce a transformation on the set of all candidate
solution which would map the subset of valid solu-
tions “together” and then the search would only oper-
ate on that subset. We believe that such transforma-
tions (sometimes called indirect representations) (Se-
bald and Chellapilla, 1998; Rothlauf, 2006) have a
great potential to be used in optimization planning.
AlternativeApproachestoPlanning
29

7.5 Overall Design of a Hyper-heuristic
based Planner
So far, no competitive planning system based on
hyper-heuristics has emerged. There are, however,
portfolio-based planners, that use several different al-
gorithms and a policy to choose form them. These
policies are usually quite simple - several algorithms
are run together until one of them finishes.
8 METHODOLOGY
We will here describe the methodology for solving the
research problems mentioned at the end of section 6.
We will use the following notation:
• t be a planning problem instance
• S be the set of all sequences of actions of t
• P ⊆ S be the set of all plans
• f : P 7→ R be the objective function to be mini-
mized
• solve(t, h) be a procedure to solve t with a helpful
information h (as defined earlier) returning p ∈ P
• time(t, h) be the time requirements of solve(t, h)
• H be the set of all possible values for h
Standard forward search planning techniques (like
A*) operate on the set S. They start form short se-
quences trying to prolong them in order to achieve
some p ∈ P. During the search, they use a heuristic
distance estimator to guide the search.
Meta-heuristicoptimization techniques (like GAs)
operate on the set P (set of all possible solutions) and
use f (p) as a fitness function to evaluate p ∈ P. They
assume that candidate solutions from P can be easily
obtained.
Hyper heuristics, on the other hand, operate on the
set H searching for solutions h. To evaluate the solu-
tion h ∈ H they use f(solve(t, h)) as a fitness func-
tion. As a “side effect”, they search for the solution
to the original problem. Such approach has a distinct
advantages against classical techniques as it is able to
adapt the search strategy specifically to the problem
instance.
We believe that standard forward search planning
techniques are most suitable for domains where goal
states are very sparse (i.e. |P| is small) and finding
some p ∈ P among S is difficult or in cases where we
have to guarantee optimality.
Meta-heuristics, on the contrary, should be effec-
tive on domains where goal states are dense (i.e. large
|P|) and finding optimal solution would take too much
time.
First, we would like to develop a meta-heuristic
optimization algorithm and then use it as one of the
components for a hyper-heuristic based planner.
8.1 Meta-heuristic Planning Algorithm
We would like to use standard Evolutionary Algo-
rithm for optimization planning. The issue remains
how to guarantee that search operators (like crossover
and mutation) will produce valid plans.
We decided to solve this problem by a penalty
function. We extend the function f to the whole S
so that all s ∈ S will be considered a valid solutions.
We will devise means to evaluate invalid solutions in
a way which would guide the search towards valid so-
lutions (i.e. invalid solutions that are close to valid
ones have a better evaluation that those that are far
from any valid solution).
For this task, we will make use of heuristic dis-
tance estimators to tell us how far from some valid
solution the candidate solution is. The new objective
function f
′
: S 7→ R will be a combination of f (which
is a sum of costs of used actions) and a heuristic dis-
tance estimator d. d is zero for all p ∈ P and greater
than zero for s ∈ S \ P (i.e. it penalizes invalid solu-
tions).
The weights of f and d in the formula as well as
the type of heuristic estimator used will be parame-
ters of the algorithm. These parameters may later be
subjected hyper-optimization.
8.2 Designing a Hyper-heuristic based
Planner
We would like to design the hyper-heuristic planner
using MCTS algorithm. The system should be able
to find the most suitable search algorithm as well
as manage the distribution of CPU time between the
search for searching strategy and the search for the
solution.
The system will be based on a portfolio of low-
level planning algorithms which will be used in the
simulation phase of MCTS. These low-level algo-
rithms should have the following properties:
• be able to solve satisficing planning task - find a
path to some goal state from given initial state
• be very fast
• may find (even vastly) suboptimal solutions
• the portfolio should be diverse - for every plan-
ning domain there should be an algorithm that
works well on that domain
ICAART2015-DoctoralConsortium
30

• if the low-levelalgorithm requires some initial pa-
rameters to be set, then we create more copies of
this algorithm and add them to the portfolio with
different parameter settings
As those low-level planning algorithms, we will use:
• Standard planning algorithms - A*, IDA*,
weighted-A*, enforced hill-climbing and others
• combined with standard heuristic distance estima-
tors (mentioned in section 7.3)
• “non-standard” search algorithms - beam-stack
search, symbolic search and others (Edelkamp
and Schrdl, 2012)
• meta-heuristic optimization algorithms including
the one described in the previous section
• planners from the Agile track of IPC
The overall MCTS algorithm should combine the se-
lection of promising candidate plans and promising
search strategies for given problem. We have already
developed some concrete ideas of how to do that and
we will describe one of them here.
We will use MCTS in a standard way for planning
as in (Trunda, 2013; Trunda and Bart´ak, 2013), that
is:
• tree covers an initial part of the problem state-
space
• root of the tree represents an initial state
• edges from the node correspond to applicable ac-
tions
• successors correspond to states after applying the
action
• each node represents a sequence of actions given
by labels of edges on the path from root to the
node
In the figure 3 there is an example of MCTS tree
early in the search. s0 is the initial state, s1 is the se-
lected leaf, a
1
to a
3
are actions. In the figure 4 there is
the tree after expansion. New states that are reachable
from s1 are added.
The algorithm works as described in section 2.3.
It selects the most urgent leaf, expands it by adding its
successors to the tree and then runs a simulation from
this leaf. Simulations corresponds to finding some
path from a state that the leaf represents to some goal
state.
We will enhance this tree in a following manner:
to every leaf node, we add new successors - one for
each low-level planner in the portfolio. We will call
them virtual leaves. The selection phase will work in
the same way and select the most urgent virtual leaf
- which means that is selects the (real) leaf and then
Figure 3: Example of a classic MCTS tree before expan-
sion.
Figure 4: Example of a classic MCTS tree after expansion.
an algorithm to use. During the simulation phase, the
selected algorithm will be used. After the expansion,
however, the virtual leaves will not remain in the tree
as inner nodes, but will move to the new leaves.
In the figure 5 there is an example of an enhanced
MCTS tree. s0 is the initial state, s1 to s3 are other
states. a
1
to a
3
are actions and Alg1 to Alg3 are vir-
tual leaves, Alg2 of s2 is the selected leaf. In the fig-
ure 6 there is the tree after expansion. New states that
are reachable from s2 are added, but virtual leaves are
not kept as inner nodes in the tree. The are copied to
the successors together with all statistical information
they were holding.
This way only the real nodes remain in the tree
(therefore saving space), but the algorithm is still able
to use different search algorithms in different parts of
the tree. Inner nodes will accumulate all the simula-
tion results no matter of the low-level algorithm that
was used. This behaviour is desired, since the simu-
lation should be random and the results of any of the
low-level algorithms could theoretically by generated
by a random walk so it makes sense to accumulate the
results.
This design should allow the algorithm to auto-
matically decompose the domain and use different
search algorithms in different components. The node
selection policy should prefer the most suitable algo-
AlternativeApproachestoPlanning
31

Figure 5: Example of an enhanced MCTS tree before ex-
pansion.
Figure 6: Example of an enhanced MCTS tree after expan-
sion.
rithm in each part of the tree and therefore support
division of the tree into parts representing different
components of the domain.
This is just a basic idea which needs to be imple-
mented and properly tested. It is likely that during our
research we will make changes to the design.
8.2.1 CPU Time Management
It is important to keep track of how long the simula-
tions take. In the properties that the low-level algo-
rithms should have, we mentioned speed, but it is not
possible to guarantee a priori that an algorithm will be
fast on all domains. If we selected wrong algorithm,
the single simulation might take more time than find-
ing an optimal solution by the right algorithm.
We propose the following solution: we set a time
limit on how long the simulation can take. This limit
will be low on the beginning and will increase in time
to allow more sophisticated algorithms in the simula-
tion phase.
Furthermore, during the selection phase of the vir-
tual leaves, we will consider not only solution quality
(like with the inner nodes), but also time, that the sim-
ulations took. This should penalize the algorithms
that found good solutions, but the search took too
long.
Techniques where the search algorithm regulates
itself during the search fall into category of au-
tonomous methods (Hamadi et al., 2012) that are be-
coming popular these days. We believe that MCTS
is a suitable platform for autonomous search and we
would like to incorporate more of these techniques
into the final design.
8.2.2 Evaluation of the Simulations
To evaluate the random sample from selected leaf l
using the selected algorithm h, we need to get the
value f(solve(l, h)). One way to do that is to actu-
ally run the search in the simulation phase. It may,
however, happen on difficult domains that no method
will be able to finish even one simulation within the
time limit described in the previous subsection. And
even if it does, the search might take quite a long time
and be the bottle-neck of the algorithm.
Therefore it might be helpful to devise another
means of random sampling. We would like to create a
surrogate model based on fitness approximation tech-
niques (Shi and Rasheed, 2010) which would allow
us to evaluate the samples much faster. Also for al-
gorithms like A*, the Estimating search effort theory
(mentioned earlier) can be used.
Another interesting approach for determining
which algorithm is the best for given problem is the
Sub-sampling principle that we successfully used for
example in (Trunda and Bart´ak, 2014). It is based
on an assumption, that algorithms that are good on
small problems will also be good on larger problem
from the same domain a vice versa - if an algorithm is
bad on small problem, it will still be bad on a larger
problem from the same domain. We can therefore
test the algorithm on small problems (which is much
faster) and transfer the results to original problem in-
stances. We can easily create small problems as a sub-
problems of the original.
9 EXPECTED OUTCOME
The outcome of the PhD. thesis should be new theo-
retical and practical results about using the methods
of soft-computing in planning. Specifically:
• creation of a new planning system based on opti-
mization meta-heuristics
ICAART2015-DoctoralConsortium
32

• introduction of the hyper-heuristic principle to
planning, creation of a stronger planner than sim-
ple portfolios
• contribution to algorithm selection problem in
planning (especially identifying meta-features of
search problems)
ACKNOWLEDGEMENT
The research is supported by the Grant Agency of
Charles University under contract no. 390214 and it
is also supported by SVV project number 260 104.
REFERENCES
Auer, P., Cesa-Bianchi, N., and Fischer, P. (2002). Finite-
time analysis of the multiarmed bandit problem. Ma-
chine Learning, 47(2-3):235–256.
Brie, A. H. and Morignot, P. (2005). Genetic planning using
variable length chromosomes. In Biundo, S., Myers,
K. L., and Rajan, K., editors, ICAPS, pages 320–329.
AAAI.
Chaslot, G., Bakkes, S., Szita, I., and Spronck, P. (2008).
Monte-carlo tree search: A new framework for game
ai. In Proceedings of the 4th Artificial Intelligence
for Interactive Digital Entertainment conference (AI-
IDE), pages 216–217. AAAI Press.
Edelkamp, S. (2006). Automated creation of pattern
database search heuristics. In Edelkamp, S. and
Lomuscio, A., editors, MoChArt, volume 4428 of
Lecture Notes in Computer Science, pages 35–50.
Springer.
Edelkamp, S. and Schrdl, S. (2012). Heuristic Search - The-
ory and Applications. Academic Press.
Genesereth, M. R., Love, N., and Pell, B. (2005). General
game playing: Overview of the aaai competition. AI
Magazine, 26(2):62–72.
Ghallab, M., Nau, D., and Traverso, P. (2004). Automated
Planning: Theory and Practice. Morgan Kaufmann
Publishers, Amsterdam.
Hamadi, Y., Monfroy, E., and Saubion, F. (2012). Au-
tonomous search. Springer-Verlag.
Haslum, P., Botea, A., Helmert, M., Bonet, B., and Koenig,
S. (2007). Domain-independent construction of pat-
tern database heuristics for cost-optimal planning. In
AAAI, pages 1007–1012. AAAI Press.
Helmert, M. and Domshlak, C. (2009). Landmarks, critical
paths and abstractions: What’s the difference anyway?
In Gerevini, A., Howe, A. E., Cesta, A., and Refanidis,
I., editors, ICAPS. AAAI.
Hoffmann, J. (2011). Where Ignoring Delete Lists
Works, Part II: Causal Graphs. In 21st International
Conference on Automated Planning and Scheduling,
Freiburg, Allemagne.
Kocsis, L. and Szepesv´ari, C. (2006). Bandit based monte-
carlo planning. In Proceedings of the 15th Eu-
ropean Conference on Machine Learning (ECML),
pages 283–293. Springer Verlag.
Korf, R. E., Reid, M., and Edelkamp, S. (2001). Time com-
plexity of iterative-deepening-a
*
. Artif. Intell., 129(1-
2):199–218.
Nakhost, H. and M¨uller, M. (2009). Monte-carlo explo-
ration for deterministic planning. In Proceedings of
the International Joint Conference on Artificial Intel-
ligence (IJCAI), pages 1766–1771.
Olaya, A., L´opez, C., and Jim´enez, S. (visited December 10,
2014). International planning competition. [online].
Pommerening, F. and Helmert, M. (2013). Incremental lm-
cut. In Borrajo, D., Kambhampati, S., Oddi, A., and
Fratini, S., editors, ICAPS. AAAI.
Pommerening, F., Rger, G., and Helmert, M. (2013). Get-
ting the most out of pattern databases for classical
planning. In Rossi, F., editor, IJCAI. IJCAI/AAAI.
Pommerening, F., Rger, G., Helmert, M., and Bonet, B.
(2014). Lp-based heuristics for cost-optimal planning.
In ICAPS. AAAI.
Rothlauf, F. (2006). Representations for genetic and evolu-
tionary algorithms (2. ed.). Springer.
Rothlauf, F. (2011). Design of Modern Heuristics. Natural
Computing Series. Springer.
Schadd, M. P. D., Winands, M. H. M., van den Herik,
H. J., Chaslot, G. M. J.-B., and Uiterwijk, J. W. H. M.
(2008). Single-player monte-carlo tree search. In Pro-
ceedings of the 6th international conference on Com-
puters and Games (CG ’08), volume 5131 of LNCS,
pages 1–12. Springer Verlag.
Sebald, A. V. and Chellapilla, K. (1998). On making prob-
lems evolutionarily friendly - part 2: Evolving the
most convenient coordinate systems within which to
pose (and solve) the given problem. In Porto, V. W.,
Saravanan, N., Waagen, D. E., and Eiben, A. E.,
editors, Evolutionary Programming, volume 1447 of
Lecture Notes in Computer Science, pages 281–290.
Springer.
Shi, L. and Rasheed, K. (2010). A survey of fitness ap-
proximation methods applied in evolutionary algo-
rithms. In Tenne, Y. and Goh, C.-K., editors, Compu-
tational Intelligence in Expensive Optimization Prob-
lems, volume 2 of Adaptation Learning and Optimiza-
tion, pages 3–28. Springer Berlin Heidelberg.
Simon, D. (2013). Evolutionary Optimization Algorithms.
Wiley.
Solano, M. and Jonyer, I. (2007). Performance analysis of
evolutionary search with a dynamic restart policy. In
Wilson, D. and Sutcliffe, G., editors, FLAIRS Confer-
ence, pages 186–187. AAAI Press.
Toropila, D., Dvoˇr´ak, F., Trunda, O., Hanes, M., and Bart´ak,
R. (2012). Three approaches to solve the petrobras
challenge: Exploiting planning techniques for solving
real-life logistics problems. In Proceedings of 24th
IEEE International Conference on Tools with Artifi-
cial Intelligence (ICTAI), pages 191–198. IEEE Con-
ference Publishing Services.
AlternativeApproachestoPlanning
33

Trunda, O. (2013). Monte carlo techniques in planning.
Master’s thesis, Faculty of Mathematics and Physics,
Charles University in Prague.
Trunda, O. (2014). Automatic creation of pattern databases
in planning. In Kurkov´a, V., editor, Proceedings of
14th conference ITAT 2014 Workshops and Posters,
volume 2, pages 85–92. Institute of Computer Sci-
ence, AS CR.
Trunda, O. and Bart´ak, R. (2013). Using monte carlo tree
search to solve planning problems in transportation
domains. In Castro, F., Gelbukh, A. F., and Gonzlez,
M., editors, MICAI (2), volume 8266 of Lecture Notes
in Computer Science, pages 435–449. Springer.
Trunda, O. and Bart´ak, R. (2014). Determining a proper
initial configuration of red-black planning by machine
learning. In Proceedings of the International Work-
shop on Meta-learning and Algorithm Selection, vol-
ume 1201, pages 51–52. CEUR Workshop Proceed-
ings.
Vaquero, T. S., Costa, G., Tonidandel, F., Igreja, H., Silva,
J. R., and Beck, C. (2012). Planning and scheduling
ship operations on petroleum ports and platform. In
Proceedings of the ICAPS Scheduling and Planning
Applications Workshop (SPARK), pages 8–16.
Westerberg, C. H. and Levine, J. (2000). “genplan”: Com-
bining genetic programming and planning. In Garag-
nani, M., editor, 19th Workshop of the UK Plan-
ning and Scheduling Special Interest Group (PLAN-
SIG 2000), The Open University, Milton Keynes, UK.
ICAART2015-DoctoralConsortium
34
