
Video-to-video Pose and Expression Invariant Face Recognition
using Volumetric Directional Pattern
Almabrok E. Essa and Vijayan K. Asari
Department of Electrical and Computer Engineering
University of Dayton, 300 College Park, Dayton, OH, 45469, U.S.A.
Keywords: Volumetric Directional Pattern, Key Frame Extraction, Video to Video Face Recognition.
Abstract: Face recognition in video has attracted attention as a cryptic method of human identification in surveillance
systems. In this paper, we propose an end-to-end video face recognition system, addressing a difficult problem
of identifying human faces in video due to the presence of large variations in facial pose and expression, and
poor video resolution. The proposed descriptor, named Volumetric Directional Pattern (VDP), is an oriented
and multi-scale volumetric descriptor that is able to extract and fuse the information of multi frames, temporal
(dynamic) information, and multiple poses and expressions of faces in input video to produce feature vectors,
which are used to match with all the videos in the database. To make the approach computationally simple
and easy to extend, key-frame extraction method is employed. Therefore, only the frames which contain
important information of the video can be used for further processing instead of analysing all the frames in
the video. The performance evaluation of the proposed VDP algorithm is conducted on a publicly available
database (YouTube celebrities’ dataset) and observed promising recognition rates.
1 INTRODUCTION
Face detection and recognition has received a great
deal of attention for the past three decades and
become one of the most popular research areas in
computer vision and pattern recognition. Face
recognition has spread in several applications such as
biometric systems, access control and information
security systems, content-based video retrieval
systems, and more generally image understanding.
Only recently researchers’ interest spread into the
domain of video, where the problem becomes more
challenging due to the pose variations, different facial
expressions, illumination changes, occlusions and so
on. However, it also has the benefit of providing
many samples of the same person, thus providing the
opportunity to convert many weak examples into a
strong prediction of the identity. Due to its
importance, many researchers have focused on video
based face recognition with several approaches
proposed as in (Shakhnarovich et. al., 2002), (Liu and
Chen, 2003), (Lee et. al., 2003), (Aggarwal et. al.,
2004), (Arandjelovi´c and Cipolla, 2009),
(Nishiyama et. al., 2005) and (Li et. al., 2005).
Face recognition can generally be categorized into
one of three scenarios based on the characteristics of
the images to be matched, such as still-to-still image,
video-to-still image, and video-to-video face
recognition. Unlike still faces videos contain plentiful
information than a single image like spatiotemporal
information. Face recognition in videos can be more
robust and stable by fusing information of multi
frames, temporal information and multi poses of faces
in videos make it possible to explore shape
information of the face and combined into the
framework of face recognition (Suneetha, 2014). The
video-based recognition has more advantages than
the image-based recognition. Firstly, the temporal
information of faces can be utilized to facilitate the
recognition task. Secondly, more effective
representations, such as a 3D face model or super-
resolution images, can be obtained from the video
sequence and can be used to improve recognition
results. Finally, video based recognition allows
learning or updating the subject model over time to
improve recognition results for future frames. So
video based face recognition is also a very
challenging problem, which suffers from following
nuisance factors such as low quality facial images,
scale variations, illumination changes, pose
variations, motion blur, and occlusions and so on
(Zhang et. al, 2011) (Best-Rowden et. al., 2013).
The key of each face recognition system is the
utilization of the feature extraction technique that
498
Asari V. and Essa A..
Video-to-video Pose and Expression Invariant Face Recognition using Volumetric Directional Pattern.
DOI: 10.5220/0005353604980503
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 498-503
ISBN: 978-989-758-090-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
must be able to extract features from the face image
that is distinct and stable under different conditions
during the image acquisition process. The texture of
objects in digital images is an important property
utilized in many computer vision and image analysis
applications such as face recognition, object
classification, and segmentation. After obtaining the
image of a face, the next step of human face
identification is to extract and describe salient
features from facial images, in the context of feature
description and representation applications, there are
two common types of techniques; the first one is
subspace based holistic feature which suffer during
illumination variation and alignment error. The
second one is local appearance feature. Among the
most successful local face appearance representations
are local patterns which are basically fine-scale
descriptors that capture small texture details.
The rest of this paper is organized as follows.
Section II illustrates the video to video face
recognition methodology, section III presents the
proposed VDP approach, section IV discusses the key
frame extraction technique, section V presents the
experimental results, and section VI concludes the
paper.
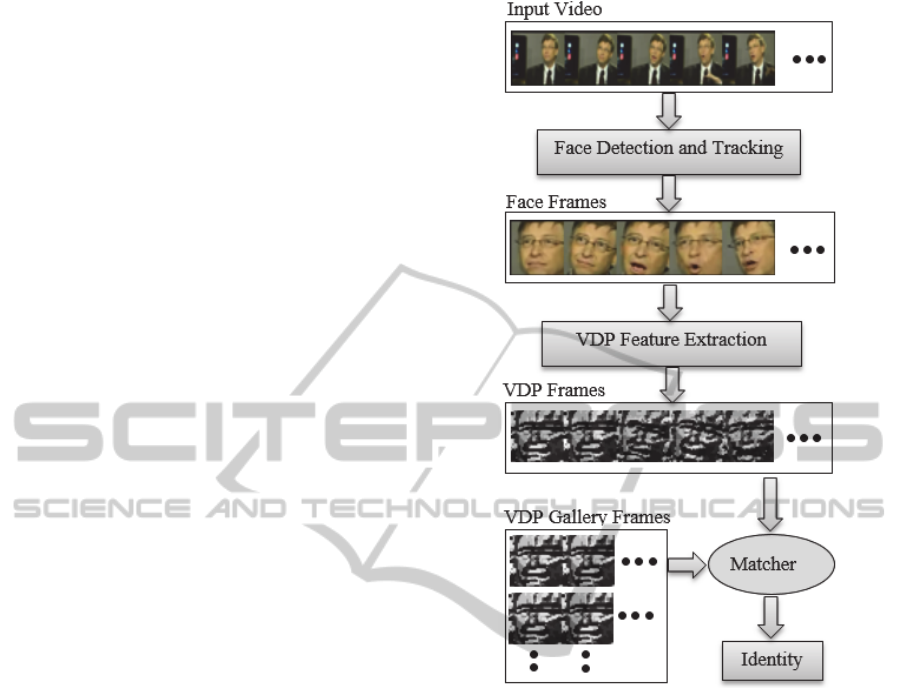
2 METHODOLOGY
The main goal of the volumetric directional pattern is
extracting and fusing the temporal information
(dynamic features) from three consecutive frames
which are distinct under multi poses and facial
expression variations. Many of the computer vision
applications employ the texture analysis algorithms.
One of the most high performing texture algorithms
is based on the concept of local pattern descriptor
which describes the relationship of pixels to their
local neighbourhood. To make the approach easy to
extend and computationally simple, the key-frames
based method is performed. Instead of analysing all
the frames in the video, only the frames which contain
more information of the video can be used for feature
extraction processing. The key frames are obtained by
computing the edge difference between the
consecutive frames and those frames exceeding a
predefined threshold are considered as key frames.
The overall processing steps in the proposed
technique is presented in figure 1.
With a video as input and a gallery of videos, we
perform face recognition process throughout the
whole video clip. Firstly, we detect and track faces
using Viola and Jone’s face detector. Then for each
frame we extract and combine the dynamic features
Figure 1: Video-to-video face recognition pipeline.
of its two neighbouring frames using our new
algorithm. Similar procedure is flowed for the gallery
videos. Finally, we compare the encoded VDP-
feature histogram from each frame with all other
candidate’s VDP-feature vectors of all gallery video
frames using Chi-Square dissimilarity measure.
3 VOLUMETRIC DIRECTIONAL
PATTERN (VDP)
The extraction of distinct and stable features is the
most fundamental and important problem in pattern
recognition. The first step after obtaining the image
of a face is to extract and describe salient features.
There are two common types of features; the first one
is a subspace based holistic feature (geometric
features). The second one is local appearance feature.
Geometric features can be represented by the shapes
and location of facial components such as eyes, nose,
mouth etc. Due to the uncontrolled environments
Video-to-videoPoseandExpressionInvariantFaceRecognitionusingVolumetricDirectionalPattern
499

during the image acquisition process, these
representations suffer to obtain the facial features.
The appearance based features present the appearance
changes of the facial skin texture, such as wrinkles
and furrows (Suneetha, 2014). Among the most
successful local face appearance representations are
local patterns which are basically fine-scale
descriptors that capture small texture details.
Volumetric Directional Pattern (VDP) represents
the local appearance features. VDP is a gray-scale
pattern that characterizes and fuses the temporal
structure (dynamic information) of three consecutive
frames. VDP computes the edge response values in
different directions at each pixel position, and uses
the relative strength magnitude to encode the image
texture. The VDP feature extraction techniques uses
the concept of local directional pattern extraction
method presented in (Jabid et. al., 2010), (Kim et. al.,
2013). VDP is a twenty four bit binary code assigned
to each pixel of an input frame. This can be calculated
by comparing the relative edge response value of a
particular pixel from three consecutive frames in
different directions by using Kirsch masks in eight
different orientations
07
(M - M )
. The masks are
centred on its own position for one frame and the
corresponding positions of the other two frames.
These masks are shown in figure 2.
01 2 3
335 355 555 55 3
305 30 5 30 3 5 0 3
335 333 333 333
MM M M
533 333 333 333
50 3 5 0 3 30 3 30 5
533 55 3 555 355
−− − −
−− −− −
−− −−− −−− −−−
−− −−− −−− −−−
−−−−−
−− − −
45 6 7
MM M M
Figure 2: Kirsch edge masks in all eight directions.
Given a central pixel in the current frame (middle
frame) of three consecutive frames, the eight different
directional edge response values are
( =
8,9,…,15) and that used to create an eight bit binary
number. This can describe the edge response pattern
of each pixel in the current frame. The eight different
edge response values
(
= 16,17,…,23
)
and
(=0,1, ...,7) that are used to create an eight bit
binary number. Each number can describe the edge
response pattern of the respective pixel in the
previous frame and next frame respectively. Finally,
we concatenate all of these spatiotemporal directional
response patterns of a particular pixel to get a twenty
four bit binary pattern. These edge responses and the
corresponding bit positions are shown in figure 3.
(a)
(b)
(c)
Figure 3: Twenty four edge responses and VDP binary bit
positions: a) For the previous frame, b) for the current
frame, c) for the next frame.
=
(
×
,
)
(1)
=
(
×
,
)
(2)
=
(
×
,
)
(3)
Where (∙) represents the dot product operation,
is the mask, and
×
is 3×3 neighbors of the
center pixel of each frame.
,
and
are the
spatiotemporal directional response values for the
previous, current, and next frames respectively.
In order to generate the VDP-feature, we need to
know the most prominent temporal information
indicating the dynamic features (DF) for all three
consecutive frames and then set them to 1 and the rest
of the 16 bits of VDP pattern are set to 0. Finally, the
VDP code can be derived by:
715
08
23
16
()2()2
1, 0
()2,()
0, 0
ii
i i DF i i DF
ii
i
ii DF i
i
VDP b n n b c c
x
bp p bx
x
==
=
=−×+−×+
≥
−× =
<
(4)
Where
,
and
the
most prominent
dynamic features for all three consecutive frames.
Figure 4 shows an example of VDP code computation
with = 3. We replace each particular pixel from
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
500
one frame with the result of combining its 3×3
neighbours with the other 3×3 corresponding
neighbours from the previous and next frames.
48 44 39
29 26
41 50 49
C
48 52 46 48 44 39 53 47 40
83 73 29 26 31 22
108 98 80 41 50 49 29 36 41
PCN
The binary code for pixel C is (011001000100011000101100)
Figure 4: VDP code computation of single subject.
The algorithm stages for VDP calculation:
Stage1: Detect faces from the video scene (we used
Viola and Jone’s face detector).
Stage2: Select three consecutive frames each time
and for each pixel and its corresponding pixels. Apply
equation 1 for the previous frame’s pixels, equation 2
for the current frame’s pixels, and equation 3 for the
next frame’s pixels.
Stage 3: Apply equation 4 by the time of finishing
stage 2 for each pixel. Then substitute this value
instead of that pixel.
Stage 4: Normalize and extract the VDP-feature
histogram for the matching process.
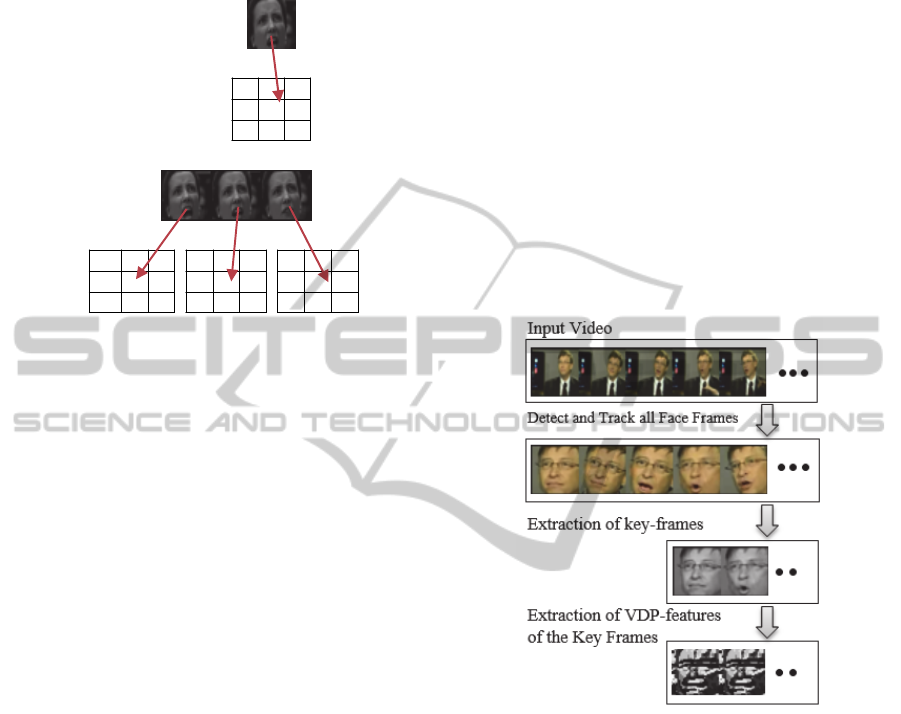
4 KEY FRAME EXTRACTION
An important step in video analysis and content based
video information is key frame extraction which is an
essential part in video summarization. Key frame is
the frame which can represent the salient content and
information of the video. The key frames extracted
must summarize the characteristics of the video, and
the image characteristics of a video can be tracked by
all the key frames in time sequence (Khurana et. al.,
2013), (Liu and Zhao, 2009).
It is not meaningful to analyze all the frames in
the video if they do not contain important
information. Therefore, we find and detect the frames
which contain important information to use for
further process. For the detection of key frames we
have used the Canny edge detector to calculate the
difference between two consecutive frames. Only
when the difference exceeds a threshold, one of the
consecutive frames is considered as a key frame.
The steps for key frame extraction from the video
is as follows, and figure 5 shows the key frames and
their VDP-features.
Step1: Obtain the gray scale image for two
consecutive frames.
Step2: Use the Canny edge detector to find the edge
difference between all consecutive frames.
Step3: Compute the mean and standard deviation for
all edge differences.
Step4: Calculate the threshold using the formula:
Threshold = mean + a × standard deviation where a is
a constant.
Step5: Find and store the key frames which exceed
that threshold.
Figure 5: Extraction of key frames.
5 EXPERIMENTAL RESULTS
To evaluate the pose and expression variation
robustness of the proposed method, we tested it on
YouTube Celebrities dataset (Kim et. al., 2008). All
the face images in this work were detected by using
the Viola and Jone’s face detector (Viola and Jones
2004). After key frame extraction process all the
frames are resized to 64 × 64 and then extract the
spatiotemporal information using the proposed VDP.
When it comes to the face recognition process, we
represent the face using a VDP-feature histogram.
The objective is to compare the encoded feature
vector from one frame with all other candidate’s
feature vector using Chi-Square dissimilarity
Frame under consideration
Particular pixel with its neighbors
Particular frame with its
two consecutive frames
Video-to-videoPoseandExpressionInvariantFaceRecognitionusingVolumetricDirectionalPattern
501
measure. This is a measure between two feature
vectors, H1 and H2, of length N and it is defined as:
2
2
12
12
12
1
(() ())
(, )
() ()
N
i
Hi H i
HH
Hi H i
χ
=
−
=
+
(5)
The corresponding face of the VDP-feature vector
with the lowest measured value indicates the match
found. Note that all the implementations are in the
MATLAB environment using Intel(R) Xeon(R)
desktop computer, 2.00GHz CPU with 12GB RAM.
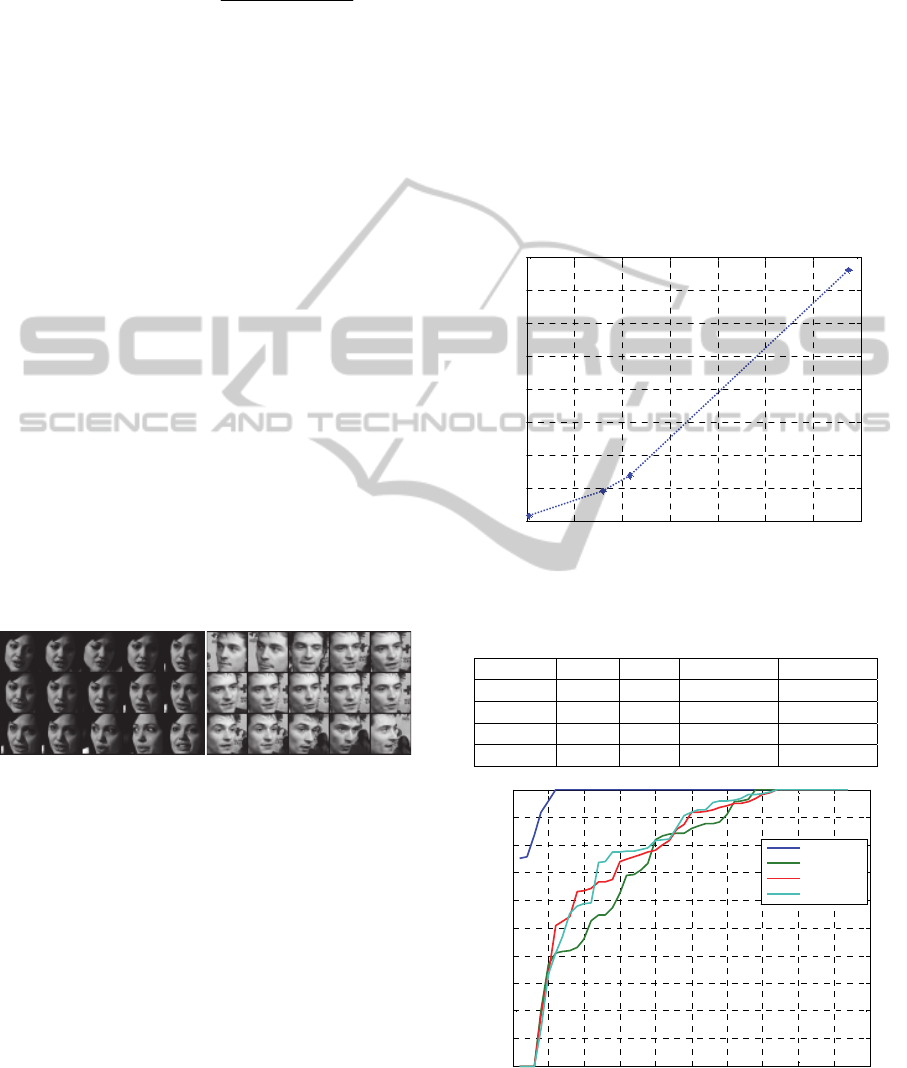
5.1 YouTube Celebrities Dataset
It is a large-scale video dataset which contains 1910
video sequences of 47 different subjects (actors and
politicians celebrities). The dataset is considered as
one of the most challenging video databases due to
the large illumination, pose, and expression variations
as well as low resolution and motion blur, which can
be seen in figure 6. We evaluated the proposed VDP
on all the 47 celebrities, while the state-of-the-art
methods evaluated on only a subset of the subjects
(e.g. in (Yang et. al., 2013). They use the first 29
celebrities). For each subject, we select one video clip
as the training data with a different one as the testing
data from the same video scene. The experimental
setup were organized as 2 parts. Part 1 uses all frames
of the training/testing data that includes 15969 frames
and part 2 uses only the key-frames of the
training/testing data.
Figure 6: Some samples of YouTube celebrities’ dataset.
5.1.1 Using All Frames
We tested our method for face recognition using all
the frames from each video in the testing set which
includes 7745 frames. We compared the features of
each frame one by one with all the training set which
includes 8224 frames. This has taken 0.43 s/frame for
the whole process (detect faces, extract VDP-
features, and matching process).
5.1.2 Using Key-frames
In this part we tested our method for face recognition
using three kinds of key frame selections strategies
depending on the edge difference between the frames.
This is to show the performance and the effectiveness
of the proposed method in terms of the accuracy and
speed. In the first case, the number of frames in the
testing set became 1063 frames and that in the
training set became 1127 frames. This set is called K-
F1. In the second case, the testing set became 2609
frames and the training set became 2712 frames. This
is named as K-F2. Finally, the testing set is reduced
to 3175 frames and the training set to 3319 frames.
This set is called K-F3. Figure 7 shows the
computation time (time of matching process only)
with respect to the number of frames and illustrates
the effectiveness of choosing a lower number of
frames by using the key-frame selection technique.
The results including the recognition rate and the
Figure 7: Computation time with respect to the number of
frames in the training/testing set.
Table 1: Accuracy on YouTube celebrities dataset.
Method TP FP Rec. Rate Speed
K-F1 824 f 239 f 77.5 % 5.2 m/all
K-F2 2168f 441 f 83.09 % 32.3 m/all
K-F3 2656f 519 f 83.65 % 45.8 m/all
All-F 7552f 202 f 97.39 % 4.7 h/all
Figure 8: The accuracy for each subject for all cases.
1000 2000 3000 4000 5000 6000 7000 8000
0
2000
4000
6000
8000
10000
12000
14000
16000
Frame Number
Computation Time (sec)
0 5 10 15 20 25 30 35 40 45 50
0
10
20
30
40
50
60
70
80
90
100
The Subject
The Accuracy %
All Frames
Key-Frame1
Key-Frame2
Key-Frame3
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
502

computation time are summarized in Table 1. Figure
8 shows the accuracy of each subject with all 47
subjects in all cases. The plots are presented in an
ascending order of recognition rate. It can be seen that
in this dataset, around 42 out of 47 video sets of
YouTube celebrities are recognizing really well.
Three of the datasets are too bad for recognition even
when we use all the frames for training.
6 CONCLUSIONS
In this paper, we proposed a volumetric directional
pattern (VDP) approach for robust and fast video to
video based face recognition. We developed a novel
algorithm that has the ability to extract and fuse the
temporal information for the analysis of facial
dynamic changes. By using two video sequences of
the same video scene per subject, we showed that our
method could achieve higher identification accuracy
than the state-of-the-art methods. In this paper we
also presented the effect of key frame technique in
terms of accuracy and speed.
REFERENCES
G. Shakhnarovich, J. Fisher, and T. Darrell, 2002. Face
recognition from long-term observations. Computer
Vision ECCV.
X. Liu and T. Chen, 2003. Video-based face recognition
using adaptive hidden markov models. In Computer
Vision and Pattern Recognition. IEEE Computer
Society Conference.
K. C. Lee, J. Ho, M.H. Yang and D. Kriegman, 2003.
Video-based face recognition using probabilistic
appearance manifolds. In Computer Vision and Pattern
Recognition. Proceedings. IEEE Computer Society
Conference.
G. Aggarwal, A. K. R. Chowdhury and R. Chellappa, 2004.
A system identification approach for video-based face
recognition. In Proceedings of the Pattern Recognition,
17th International Conference on (ICPR'04). IEEE
Computer Society.
O. Arandjelovi´c and R. Cipolla, 2009. A pose-wise linear
illumination manifold model for face recognition using
video. Computer vision and image understanding,
113(1).
M. Nishiyama, O. Yamaguchi and K. Fukui2005. Face
recognition with the multiple constrained mutual
subspace method. In audio-and video-based biometric
person authentication. Springer.
J. Li, Y. Wang, and T. Tan, 2005. Video-based face
recognition using a metric of average euclidean
distance. Advances in biometric person authentication.
J. Suneetha, 2014. A survey on video-based face
recognition approaches. International journal of
application or innovation in engineering &
management, 3(2), (IJAIEM).
Z. Zhang, Chao Wang and Yunhong Wang, 2011. Video-
Based Face Recognition: State of the Art, Lecture Notes
in Computer Science: Biometric Recognition, (CCBR).
L. Best-Rowden, B. Klare, J. Klontz, and A. Jain, 2013.
Video-to-Video face matching: Establishing a baseline
for unconstrained face recognition. Sixth Int.
Conference on biom. Compe. IEEE, (BTAS).
S. A. Patil and Paramod j Deore, 2012. Video-based face
recognition: a survey. Proceedings of Conference on
Advances in Communication and Computing
(NCACC'12).
K. Khurana and B. Chandak, 2013. Key frame extraction
methodology for video annotation. International journal
of computer engineering & Technology, 4(2), (IJCET).
G. Liu, and J. Zhao, 2009. Key frame extraction from
MPEG video stream. Proceedings of the second
symposium international computer science and
computational technology (ISCSCT’09).
T. Jabid, M. H. Kabir, and O. S. Chae, 2010. Local
directional pattern (LDP) for face recognition. Proc.
IEEE Int. Conference of Consumer Electronics.
T. Jabid, M. H. Kabir, and O. S. Chae, 2010. Robust facial
expression recognition based on local directional
pattern. ETRI Journal 32(5).
D.J. Kim, S.H. Lee, and M.K. Sohn, 2013. Face recognition
via local directional pattern. International Journal of
Security and Its Applications. Papers 7(2).
M. Yang, P. Zhu, L. V. Gool, L. Zhang, 2013. Face
recognition based on regularized nearest points
between image sets. In IEEE FG.
M. Kim, S. Kumar, V. Pavlovic and H. Rowley, 2008. Face
tracking and recognition with visual constraints in real-
world videos. In Proc. CVPR.
P. Viola and M. J. Jones, 2004. Robust real-time face
detection. Int. journal of computer vision, 57(2).
Video-to-videoPoseandExpressionInvariantFaceRecognitionusingVolumetricDirectionalPattern
503
