Convolutional Patch Networks with Spatial Prior for Road Detection and
Urban Scene Understanding
Clemens-Alexander Brust, Sven Sickert, Marcel Simon, Erik Rodner and Joachim Denzler
Computer Vision Group, Friedrich Schiller University of Jena, Jena, Germany
Keywords:
Convolutional Neural Networks, Patch Classification, Road Detection, Semantic Segmentation, Scene
Understanding.
Abstract:
Classifying single image patches is important in many different applications, such as road detection or scene
understanding. In this paper, we present convolutional patch networks, which are convolutional networks
learned to distinguish different image patches and which can be used for pixel-wise labeling. We also show
how to incorporate spatial information of the patch as an input to the network, which allows for learning spatial
priors for certain categories jointly with an appearance model. In particular, we focus on road detection and
urban scene understanding, two application areas where we are able to achieve state-of-the-art results on the
KITTI as well as on the LabelMeFacade dataset.
Furthermore, our paper offers a guideline for people working in the area and desperately wandering through
all the painstaking details that render training CNs on image patches extremely difficult.
1 INTRODUCTION
In the last two years, the revival of convolutional (neu-
ral) networks (CN) (LeCun et al., 1989) has led to a
breakthrough in computer vision and visual recogni-
tion. Especially the field of object recognition and de-
tection made a huge step forward with respect to the
final recognition performance as can be seen by the
success on the large-scale image classification dataset
ImageNet (Krizhevsky et al., 2012). This break-
through was possible mainly due to two reasons: (1)
large-scale training data and (2) huge parallelization
to speed up the learning process. In general, an es-
sential advantage of CNs is the automatic learning of
task-specific representations of the input data, which
was previously often hand-designed.
While the majority of works focuses on applying
these techniques for object classification tasks, there
is another field where CNs can be really useful: se-
mantic segmentation. It is the task of assigning a class
label to each pixel in an image. This is why it is also
referred to as pixel-wise labeling. Previous works al-
ready showed how to use CNs in this area, e.g for road
detection (Alvarez et al., 2012; Masci et al., 2013).
However, the architectural choices and many critical
implementation details have not been discussed and
studied, although they are crucial for a high recogni-
tion performance. In our work, we therefore also give
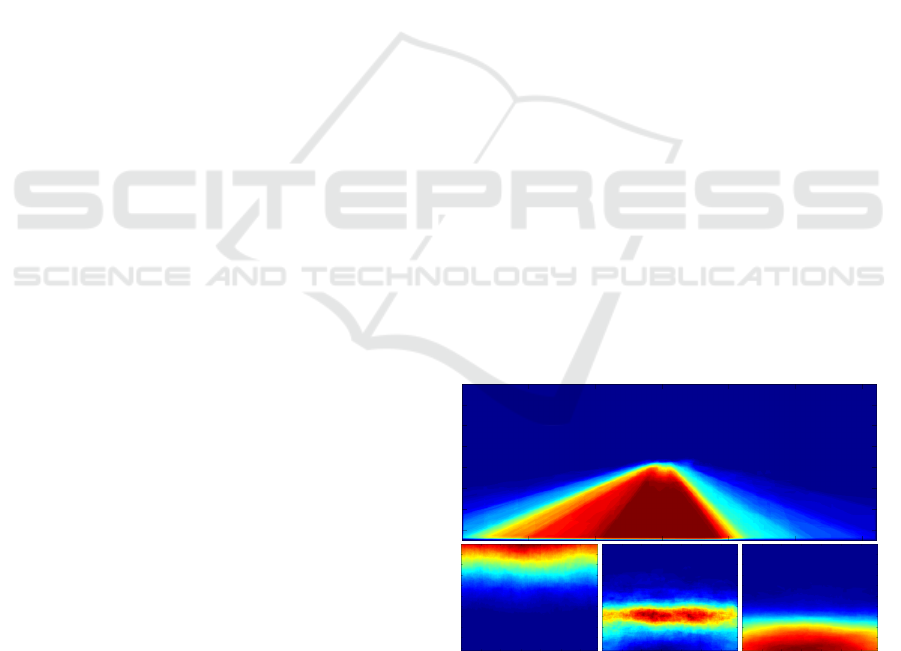
Figure 1: Illustration of spatial bias for categories in road
detection and urban scene understanding: (top) class road
of KITTI road challenge (Geiger et al., 2012), (bottom)
classes sky, car and road of LabelMeFacade (Fr
¨
ohlich et al.,
2012). Warmer colors indicate higher probabilities (best
viewed in color).
a brief list of guidelines for CN training and discuss
several aspects important to get pixel-wise labeling
with CNs running.
Furthermore, we show how to learn spatial pri-
ors during CN training, because some classes appear
more frequently in some areas of an image (see Fig.
1). In general, predicting the label of a single pixel
requires a large receptive field to incorporate as much
context information as possible. However, the high
510
Brust C., Sickert S., Simon M., Rodner E. and Denzler J..
Convolutional Patch Networks with Spatial Prior for Road Detection and Urban Scene Understanding.
DOI: 10.5220/0005355105100517
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 510-517
ISBN: 978-989-758-090-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

input dimensionality would cause a huge CN model
with too many parameters for learning it robustly
while given only a small amount of training data. We
avoid this by incorporating absolute position informa-
tion in the fully connected layers of the CN.
In this paper, we use CN pixel-wise labeling for
the tasks of road detection and urban scene under-
standing. In road detection, the pixels of an image
are classified into road and non-road parts, which is
an essential task for autonomous driving. The chal-
lenge is the huge variability of road scenes, because
of changing light conditions, surface changes, and oc-
clusions. For a qualitative and quantitative evaluation,
we use the road estimation challenge of the popular
KITTI Vision Benchmark Suite (Geiger et al., 2012).
Urban scene understanding goes one step further by
increasing the number of categories that need to be
distinguished, such as buildings, cars, sidewalks, etc.
We obtain state-of-the-art performance in both do-
mains.
In the following, we first give a brief overview of
the application of CNs for pixel-wise labeling. Sec-
tion 3 introduces our CN models and shows how to
learn spatial priors. Experiments are discussed and
evaluated in Section 4. A summary in Section 5 con-
cludes this paper.
2 RELATED WORK
Semantic segmentation was and is an active research
area with numerous publications. We will present
only those with relevant techniques (convolutional
neural networks or randomized decision trees) or a
similar scope of applications (road detection or urban
scene understanding).
Semantic Segmentation with CNs. The work of
(Couprie et al., 2014) presents an approach for seman-
tic segmentation with RGB-D images. The main idea
of their work is a multi-scale CN comprised of multi-
ple CNs for different scales of the images, which are
all linked to the fully connected layers at the end. In
contrast to their work, our approach incorporates the
spatial prior information as an important cue and a
possibility to learn a bias of the position of an object
in the image (Torralba, 2003).
Instead of performing semantic segmentation by
classifying image patches, (Gupta et al., 2014) builds
on algorithms for unsupervised region proposal gen-
eration. Each of the proposed regions is then classi-
fied with an SVM that makes use of features learned
by CN using depth and geometric features as well as a
CN trained on RGB image patches. Similarly, (Hari-
haran et al., 2014) also classifies object proposals and
combines a CN for detection and a CN for classify-
ing regions. In contrast to these works, we perform
pixel-wise labeling and are therefore not limited to a
few proposals generated by another algorithm.
Road Detection. Following up on their work with
slow feature analysis (K
¨
uhnl et al., 2011), the au-
thors of (K
¨
uhnl et al., 2012) propose spatial ray fea-
tures to find boundaries of the road. The former work
serves as a source for base classifiers which model
road, boundary, and lanes. Especially the last one is
very important for the method, since ray features are
extracted from classifier outputs. In contrast to our
work, this method strongly depends on the availabil-
ity of lane markings in the scene.
Another work in the field aims at the problem of
changing light conditions in street scenes. In (Alvarez
and Lopez, 2011), the authors compute illumination
invariant images to segment the road even if the image
is highly cluttered due to shadows. Seeds are placed
in the bottom part of the illumination invariant image
where the road is supposed to be situated. All pixels
that have a similar appearance to the seeds will then
be classified as road. Since we learn local image fil-
ters with the CNs, we do not have to explicitly model
illumination invariance in our approach but learn all
variations from the given dataset.
Similar to our approach, (Alvarez et al., 2012)
applied CNs for the task of road detection. How-
ever, their work focuses more on the transfer of la-
bels learned from a general image database which has
more images to learn from. Furthermore, they pro-
pose a texture descriptor which makes use of different
color representations of the image. Finally, general
information acquired from road scenes and informa-
tion extracted from a small area of the current image
are combined in a Naive Bayes framework to classify
the image.
Urban Scene Understanding. While road detec-
tion is a binary classification scenario, the task of
urban scene understanding is to distinguish multiple
classes like car, building and sky.
In (Fr
¨
ohlich et al., 2012) so-called iterative con-
text forests are used to classify images in a pixel-wise
or region-wise manner. The method is derived from
the well known random decision forests with the ad-
vantage that classification results of one level of the
tree can be used in the next level as additional fea-
tures. The authors of (Scharwaechter et al., 2013)
also aim for the classification of regions. They com-
bine appearance features of gray scale images and
ConvolutionalPatchNetworkswithSpatialPriorforRoadDetectionandUrbanSceneUnderstanding
511
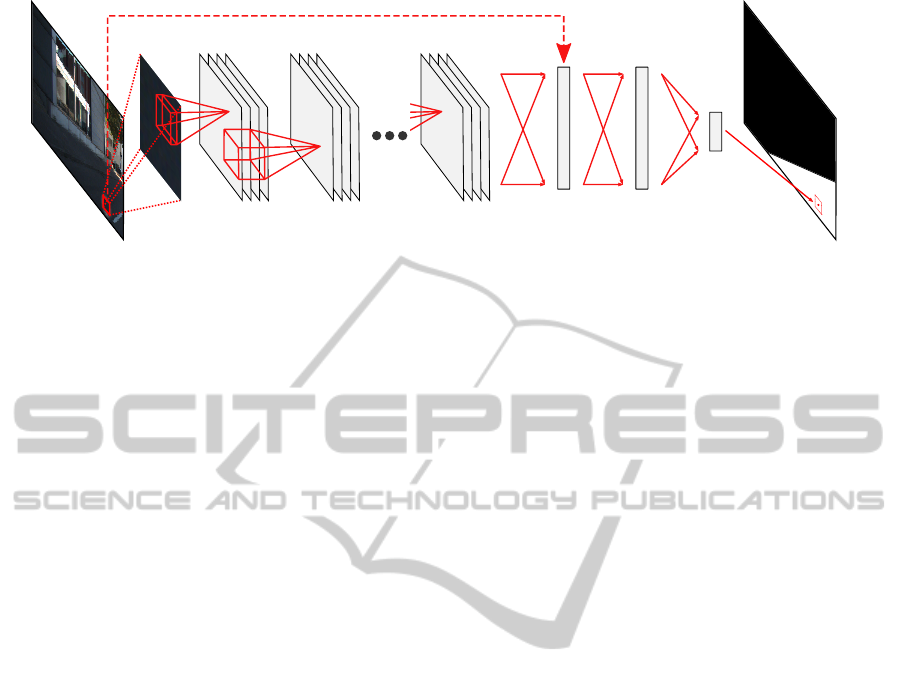
spatial information
input
image
convolutional, pooling
and non-linear activation layers
fully connected
layers
label estimation
for a single pixel
input
patch
Figure 2: Example of our convolutional patch network: in addition to the visual features we also incorporate the absolute
position information in the fully connected layers. The concrete architectures are given in the experimental section.
depth cues which are derived from dense disparity
maps. They incorporate a medium-level environment
model in order to obtain meaningful region hypothe-
ses. Then, a multi-cue bag-of-features pipeline is used
to classify these regions into object classes.
There are other works that incorporate additional
sources of information other than images from a sin-
gle camera. In (Zhang et al., 2010) dense depth maps
are used to compute view-independent 3D-features,
i.e. surface normal and height above ground. In con-
trast, the authors of (Kang et al., 2011) make use of
an additional near-infrared channel. They use hier-
archical bag-of-textons in order to learn spatial con-
text from the image. However, as these methods are
closely tied to a database that provides such informa-
tion, we propose a more generic approach.
3 CONVOLUTIONAL PATCH
NETWORKS
Convolutional (neural) networks (CNs) (LeCun et al.,
1989) belong to a family of methods, usually referred
to as “deep learning” approaches, especially in the
popular literature. The main idea is that the whole
classification pipeline consists of one combined and
jointly trained model. Most recent deep learning ar-
chitectures for vision are based on a single CN. CNs
are feed forward neural networks, which concatenate
several layers of different types with convolutional
layers playing a key role.
3.1 Architecture and CN Training
The generic architecture of our CNs is visualized in a
simplified manner in Fig. 2. The input for our network
is always a single image patch extracted around a sin-
gle pixel we need to classify. Therefore, we use the
name Convolutional Patch Network for the method.
The network itself is structured in multiple layers.
Each convolutional layer convolves the output of the
previous layer with multiple learned filter masks. Af-
terwards, the outputs are optionally combined with a
maximum operation in a spatial window applied to the
result of each convolution, which is known as max-
pooling layer. This is followed by an element-wise
non-linear activation function, such as the hyperbolic
tangent or the rectified linear unit used in (Krizhevsky
et al., 2012).
The last layers are fully connected layers and mul-
tiply the input with a matrix of learned parameters
followed again by a non-linear activation function.
The output of the network are scores for each of the
learned categories or in the case of binary classifica-
tion one score related to the likelihood of the positive
class. We do not provide a detailed explanation of the
layers, since this is described in many other papers
and tutorials (LeCun et al., 2001). In summary, we
can think about a CN as one huge model f (x;θ) that
tries to map an image through different layers to a use-
ful output. The model is parameterized by θ, which
includes the weights in the fully connected layers as
well as the weights of the convolution masks.
All parameters θ of the CN are learned by mini-
mizing the error of the network output for an example
x
i
compared the given ground-truth label y
i
:
ˆ
θ = argmin
θ
n
∑
i=1
w
i
·L ( f (x
i
;θ), y
i
) . (1)
In this setting L is a loss function and in our case we
use the quadratic loss.
Optimization is done with stochastic gradient de-
scent using momentum and mini-batches of 48 train-
ing examples (Krizhevsky et al., 2012). The learning
rate and all other hyperparameters are optimized on a
validation set.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
512
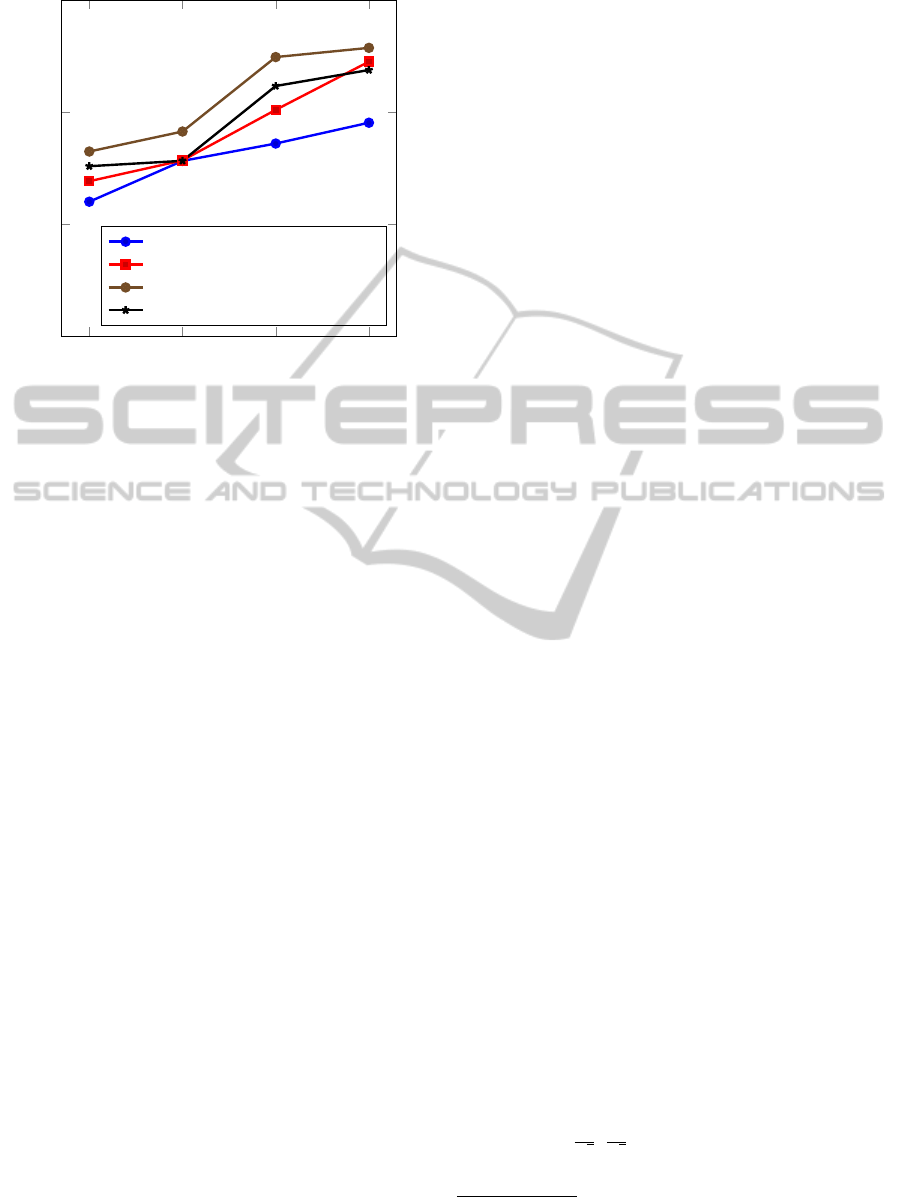
5
10
15
20
62
64
66
68
optimization epochs
maxF performance (cross-validation) [%]
Tanh, heuristic initialization
Tanh, normalized initialization
ReLU, normalized initialization
ReLU, Dropout
Figure 3: Performance for road detection with respect to the
number of optimization epochs. The performance is mea-
sured by 10 times cross-validation on the KITTI training
set.
3.2 Incorporating Spatial Priors
As already motivated in the introduction and in Fig. 1,
predicting the category by using only the information
from a limited local receptive field can be challenging
and in some cases impossible. Therefore, the work
of (Couprie et al., 2014) proposes a multi-scale CN
approach to incorporate information from receptive
fields with different sizes. In contrast, we exploit a
very common property in scene understanding. The
absolute position of certain categories in the image is
not uniformly distributed. Therefore, the position of
a patch in the image can be a powerful cue. This is
especially true for road detection as also validated by
(Fritsch et al., 2013).
Due to this reason, we provide the normalized po-
sition of a patch as an additional input to the CN. In
particular, the x ∈ [0, 1] and y ∈ [0, 1] coordinates are
added as inputs to one of the fully connected layers.
This can be viewed as having a smaller CN, which
provides a feature representation of the visual infor-
mation contained in the patch, and a standard multi-
ple layer neural network, which uses these features in
addition to the position information to perform clas-
sification. Whereas incorporating the position infor-
mation is a common trick in semantic segmentation,
with (Fr
¨
ohlich et al., 2012) being only one example,
combining these priors with CN feature learning has
not been exploited before.
3.3 Software Framework
We implemented a new open source CN frame-
work specifically designed for semantic segmenta-
tion, which will be made publicly available.
1
The
source code was designed from scratch in C++11
aiming at multi-core architectures and not necessarily
strictly depending on GPU capabilities. An important
feature of the framework is the large flexibility with
respect to possible CN architectures. For example, ev-
ery layer can be connected to an auxiliary input layer,
which is important in our case to allow for the incor-
poration of position information or to incorporate the
weight of a training example in the loss layer.
The framework does not depend on external li-
braries, which makes it practical, especially for fast
prototyping and heterogeneous environments. How-
ever, OpenCL or fast BLAS libraries such as ATLAS,
ACML, or Intel-MKL can be used to speed up con-
volutions and other algebraic operations. Convolu-
tions are in general realized by transforming them
into matrix-vector products, which requires some ad-
ditional memory overhead but leads to a significant
speedup as also empirically validated by (Chellapilla
et al., 2006). For fast testing, the complete forward
propagation through the network can also be acceler-
ated by utilizing a device that computes OpenCL.
3.4 Important Details and
Implementation Hints
Implementing our own framework allowed us to have
influence on every aspect of the convolutional net-
work in order to apply it for the task of semantic seg-
mentation. Thereby, we made some important obser-
vations concerning parameter initialization and opti-
mization techniques.
Initialization of Network Parameters. The train-
ing of networks with many layers poses a particu-
lar challenge because of the vanishing gradient is-
sue (Glorot and Bengio, 2010). A repeated multipli-
cation of the derivatives produces smaller and smaller
values. This quickly leads to numerical problems
in deep networks, particularly when using single-
precision floating point calculations.
Usually, the weights in a layer with n inputs are
initialized randomly by sampling from a uniform dis-
tribution in [−
1
√
n
,
1
√
n
], which we refer to as heuristic
initialization. However, the authors of (Glorot and
1
This work was supported by Nvidia with a hardware
donation.
ConvolutionalPatchNetworkswithSpatialPriorforRoadDetectionandUrbanSceneUnderstanding
513

Bengio, 2010) analyze the effect of vanishing gra-
dients in detail and they derive an improved initial-
ization scheme, known as normalized initialization,
which has an important impact on the learning per-
formance. This can be seen in Figure 3, where we
plot the cross-validation accuracy of our road detec-
tion application after different numbers of optimiza-
tion epochs (an epoch are 10000 iterations with mini-
batches). As can be seen, the normalized initializa-
tion leads to a better performance of the network after
a few epochs.
Benefit of Dropout and ReLU for Smaller Net-
works. Dropout as a regularizer is a means to pre-
vent a network from overfitting (Hinton et al., 2012),
which happens likely due to the large model complex-
ity of the networks. However, the small convolutional
net used in our approach for the task of road detection
does not benefit from dropout as can be seen in Fig-
ure 3. Dropout has been shown to reduce error rates
significantly in larger CN architectures (Krizhevsky
et al., 2012). Furthermore, Figure 3 also reveals that
using rectified linear units (Krizhevsky et al., 2012) as
nonlinear activations is beneficial for the task of road
detection.
Task-specific Weighting of Training Examples. If
a recognition approach with a high performance with
respect to a task-specific performance measure is re-
quired, one should optimize with a learning objective
that comes as close as possible to the final perfor-
mance measure. This hint might sound simple but we
give two examples in the following where this is ex-
tremely important to boost the performance.
For the KITTI Vision road detection benchmark,
performance is measured in the birds-eye view, while
data is presented in ego view. The authors of (Fritsch
et al., 2013) claim that the vehicle control usually hap-
pens in 2D space and therefore road detection should
also be done in this space. A wrong classified pixel
near the horizon in ego view represents a whole bunch
of pixels in the birds-eye view. To compensate for
this, we need to choose weights w
i
for the training
examples proportional to the size of the pixels after
transformation in the birds-eye view.
In urban scene understanding, we are faced with a
highly imbalanced multi-class problem, since pixels
labeled as building are more common than pixels la-
beled as door, for example. Therefore, performance is
usually measured in terms of accuracy (percentage of
correctly labeled pixels) and average recognition rate
(average of the class-wise accuracy) (Fr
¨
ohlich et al.,
2012). To focus on the average recognition rate, we
weight examples according to their number of
examples in the training set, i.e. w
i
= n
−1
y
i
.
4 EXPERIMENTS
Our experiments in semantic segmentation are eval-
uated on two applications: road detection and urban
scene understanding, which are both challenging due
to the high variation of possible appearances within
the classes.
Figure 4: Convolution masks of the first layer found during
learning on the KITTI road detection dataset.
4.1 Road Detection
For the task of road detection, we have to differenti-
ate between road and non-road patches and therefore
it is a typical binary classification problem. In re-
cent years, the most commonly used road scene chal-
lenge is the KITTI Vision benchmark (Geiger et al.,
2012). This dataset features a multi-camera setup, op-
tical flow vectors, odometry data, object annotations,
and GPS data.
There is a specific benchmark for road detection
with 600 annotated images where road and non-road
parts are labeled in the image. The dataset con-
sists of three different urban road settings: single-lane
roads with markings (UM), single-lane roads without
markings (UU) and multi-lane roads with markings
(UMM). There are challenges for road detection and
ego-lane detection. For this dataset, we follow the
evaluation protocol given in (Geiger et al., 2012) and
report the F1-measure as a binary classification met-
ric which makes use of precision and recall such that
both have the same weight.
CN Architecture. We use the CN architecture
listed in Table 1 for road detection, where we classify
patches of size 28 ×28 extracted at each pixel loca-
tion. This architecture was optimized using ten-fold
cross validation. An important architectural choice
is the incorporation of the absolute position of the
patch as an input in layer 8. This allows for learn-
ing a spatial prior of the road category. Furthermore,
it is interesting to note that the first layer applies con-
volution masks of a rather small size of 7 ×7. These
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
514

Figure 5: Qualitative results on the KITTI road detection dataset. Images show original input-data with labeled road pixels as
green overlay. Although a spatial prior is used in our approach we are able to segment road scenes with curves or occlusions
well. This figure is best viewed in color.
Table 1: CN architectures used for road detection (road det.)
and urban scene understanding (urban sun.) along with their
respective parameters. The number of outputs is denoted as
o. The parameters for a convolutional layer are given by
w ×h ×n, where n refers to the number of spatial filters
used, each of them with a size of w ×h. For pooling layers,
the parameters determine the spatial window for which the
maximum operation is performed.
# Type of layer Road det. Urban sun.
1 convolutional layer 7 ×7 ×12 7 ×7 ×16
2 maximum pooling 2 ×2 2 ×2
3 non-linear ReLU tanh
4 convolutional layer 5 ×5 ×6 5 ×5 ×12
5 non-linear ReLU tanh
6 fully connected layer o = 48 o = 64
7 non-linear ReLU tanh
8 fully connected layer o = 192 o = 192
+spatial prior
9 non-linear ReLU tanh
10 fully connected layer o = 1 o = 8
11 non-linear tanh sigmoid
Table 2: Results on the KITTI road detection dataset for
methods that only use the camera input image for predic-
tion.
Method MaxF
CN approach of (Alvarez et al., 2012) 73.97%
Spatial prior only (Fritsch et al., 2013) 82.53%
Spray features (K
¨
uhnl et al., 2012) 88.22%
Our approach without spatial prior 76.34%
Our approach with spatial prior 86.50%
masks are visualized in Fig. 4 and depict certain tex-
tural and color elements that seem to be informative
when distinguishing between road and non-road im-
age patches.
Evaluation. The quantitative results of our road de-
tection approach are given in Table 2. We compare
with the method of (K
¨
uhnl et al., 2012), which ob-
tains the current best result on the dataset, and the CN
method of (Alvarez et al., 2012). As can be seen, we
outperform the previous CN method by a large mar-
gin of over 10%. This can be mainly contributed to
the spatial prior we learn with the CN. How important
position information is for this dataset can be seen by
the performance of the baseline algorithm of (K
¨
uhnl
et al., 2012) which uses only the pixel position during
testing without any appearance features.
As the qualitative results of our approach in Fig-
ure 5 show, we are able to segment curves although
a spatial prior is incorporated. This is due to the
weighting of these information which is automatically
learned in the training. When allowing a very high
weight for the spatial prior we would obtain similar
results to the baseline algorithm.
Note that we do not make use of any additional
information other than a single camera view. Some
competitors in the challenge incorporate data of the
second camera of the stereo setup or make use of the
3D point clouds from velodyne laser scanner. Their
results are not reported here but are given on the
KITTI website. At the time of submission we are on
place 4 of 22 in the ranking
2
.
4.2 Urban Scene Understanding
For urban scene understanding, each pixel is classi-
fied into one of K classes. Our experiments are based
on the LabelMeFacade dataset (Fr
¨
ohlich et al., 2012),
which consist of 945 images. The classes that need
to be differentiated are: building, window, sidewalk,
car, road, vegetation and sky. Furthermore, there is an
additional background class named unlabeled, which
we only use to exclude pixels from the training data.
Since this is a multi-class classification problem, we
are following (Fr
¨
ohlich et al., 2012) and use the over-
all recognition rate (ORR, plain accuracy) and the av-
erage recognition rate (ARR) which is the mean of
class-wise accuracies.
CN Architecture. For urban scene understanding,
we use the CN architecture reported in the right col-
umn of Table 1, which was also optimized with 50
training examples and 50 validation examples ran-
domly selected from the LabelMeFacade dataset. As
in the previous experiment, we extract patches of size
2
http://www.cvlibs.net/datasets/kitti/eval road.php, our
method is named CN24
ConvolutionalPatchNetworkswithSpatialPriorforRoadDetectionandUrbanSceneUnderstanding
515

Original Ground-Truth pure CN outputs with spatial prior and post processing
building car door pavement road sky vegetation window unlabeled
Figure 6: Qualitative results for the LabelMeFacade dataset. We show results of our approach with and without adding
pixel positions as information for the learning procedure. As can be seen in the first three rows, these additional information
improve the results (road vs. building). However, in some cases spatial priors do not help (pavement vs. road).
Table 3: Results on LabelMeFacade in comparison to pre-
vious work. We report overall and average recognition rates
for different networks. The weighted CN was optimized
with inverse class frequency weights.
Method ORR ARR
RDF+SIFT (Fr
¨
ohlich et al., 2010) 49.06% 44.08%
ICF (Fr
¨
ohlich et al., 2012) 67.33% 56.61%
RDF-MAP (Nowozin, 2014) 71.28% -
Our approach
pure CN outputs 67.87% 42.89%
+spatial prior 72.21% 47.74%
+post processing 74.33% 47.77%
+weighting 63.41% 58.98%
28 ×28 at each pixel location. In contrast to the CN
for road detection, we used the hyperbolic tangent
function as a non-linearity because it requires fewer
neurons to express anti-symmetric behavior.
Evaluation. As can be seen in Table 3, we are
able to achieve state-of-the-art performance on this
dataset. The spatial prior significantly helps again to
boost the performance. Furthermore, we can directly
see that the weighting with respect to class frequen-
cies has a significant impact on the ARR and the ORR
performance as already discussed in Sect. 3.4.
Four segmentation examples are shown in Fig-
ure 6 in comparison to the given ground-truth labels.
The authors of (Fr
¨
ohlich et al., 2012) use a post-
processing step by fusing their results with an un-
supervised segmentation of the original images. The
probability outputs of the classifier and the segments
are combined to ensure a consistent label within re-
gions. Since the output of our approach is scattered
due to the pixel-wise labeling (column 4 and 5), we
also added this post-processing step. We make use
of the graph-based segmentation approach of (Felzen-
szwalb and Huttenlocher, 2004) with parameters k =
550 and σ = 0.5. As can be seen in the last column
the results are improved with respect to object bound-
aries. However, this procedure can also lead to large
regions with a wrong labeling (row 4). Instead of road
the whole lower part of the image is classified as pave-
ment. Both classes have a very similar appearance in
most of the images.
5 CONCLUSIONS
In this paper, we showed how convolutional patch net-
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
516

works can be used for the task of semantic segmenta-
tion. Our approach performs classification of image
patches at each pixel position. We analyzed differ-
ent popular network architectures along with differ-
ent techniques to improve the training. Furthermore,
we demonstrated how spatial prior information like
pixel positions can be incorporated into the learning
process leading to a significant performance gain.
For evaluation, we used two different application
scenarios: road detection and urban scene understand-
ing. We were able to achieve very good results in the
road detection challenge of the popular KITTI Vision
Benchmark Suite. In this scenario we outperformed
several competitors, even those that use stereo images
or laser data.
For a second set of experiments, we used the
dataset LabelMeFacade of (Fr
¨
ohlich et al., 2010)
which is a multi-class classification task and shows
very diverse urban scenes. We were again able to
achieve state-of-the-art results. Future work will fo-
cus on speeding up the prediction phase, since we cur-
rently need around 30s for each image to infer the la-
bel at each position.
REFERENCES
Alvarez, J. M., Gevers, T., LeCun, Y., and Lopez, A. M.
(2012). Road scene segmentation from a single image.
In European Conference on Computer Vision (ECCV),
pages 376–389.
Alvarez, J. M. and Lopez, A. M. (2011). Road detection
based on illuminant invariance. IEEE Transactions on
Intelligent Transportation Systems, 12(1):184–193.
Chellapilla, K., Puri, S., Simard, P., et al. (2006). High
performance convolutional neural networks for docu-
ment processing. In Tenth International Workshop on
Frontiers in Handwriting Recognition.
Couprie, C., Farabet, C., Najman, L., and LeCun, Y. (2014).
Convolutional nets and watershed cuts for real-time
semantic labeling of rgbd videos. Journal of Machine
Learning Research (JMLR), 15:3489–3511.
Felzenszwalb, P. F. and Huttenlocher, D. P. (2004). Effi-
cient graph-based image segmentation. International
Journal of Computer Vision, 59(2):1–26.
Fritsch, J., K
¨
uhnl, T., and Geiger, A. (2013). A new per-
formance measure and evaluation benchmark for road
detection algorithms. In IEEE International Con-
ference on Intelligent Transportation Systems, pages
1693–1700.
Fr
¨
ohlich, B., Rodner, E., and Denzler, J. (2010). A fast
approach for pixelwise labeling of facade images. In
Proceedings of the International Conference on Pat-
tern Recognition (ICPR), volume 7, pages 3029–3032.
Fr
¨
ohlich, B., Rodner, E., and Denzler, J. (2012). Seman-
tic segmentation with millions of features: Integrat-
ing multiple cues in a combined random forest ap-
proach. In Asian Conference on Computer Vision
(ACCV), pages 218–231.
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for autonomous driving? the kitti vision benchmark
suite. In Computer Vision and Pattern Recognition
(CVPR), pages 3354–3361.
Glorot, X. and Bengio, Y. (2010). Understanding the dif-
ficulty of training deep feedforward neural networks.
In International Conference on Artificial Intelligence
and Statistics (AISTATS), pages 249–256.
Gupta, S., Girshick, R., Arbel
´
aez, P., and Malik, J. (2014).
Learning rich features from RGB-D images for object
detection and segmentation. In European Conference
on Computer Vision (ECCV).
Hariharan, B., Arbel
´
aez, P., Girshick, R., and Malik, J.
(2014). Simultaneous detection and segmentation. In
European Conference on Computer Vision (ECCV).
Hinton, G. E., Srivastava, N., Krizhevsky, A., Sutskever, I.,
and Salakhutdinov, R. R. (2012). Improving neural
networks by preventing co-adaptation of feature de-
tectors. arXiv preprint arXiv:1207.0580.
Kang, Y., Yamaguchi, K., Naito, T., and Ninomiya, Y.
(2011). Multiband image segmentation and object
recognition for understanding road scenes. IEEE
Transactions on Intelligent Transportation Systems,
12(4):1423–1433.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
agenet classification with deep convolutional neural
networks. In Advances in neural information process-
ing systems (NIPS), pages 1097–1105.
K
¨
uhnl, T., Kummert, F., and Fritsch, J. (2011). Monocular
road segmentation using slow feature analysis. In Pro-
ceedings of the IEEE Intelligent Vehicles Symposium,
pages 800–806.
K
¨
uhnl, T., Kummert, F., and Fritsch, J. (2012). Spa-
tial ray features for real-time ego-lane extraction. In
IEEE Conference on Intelligent Transportation Sys-
tems, pages 288–293.
LeCun, Y., Boser, B., Denker, J. S., Henderson, D., Howard,
R. E., Hubbard, W., and Jackel, L. D. (1989). Back-
propagation applied to handwritten zip code recogni-
tion. Neural computation, 1(4):541–551.
LeCun, Y., Bottou, L., Bengio, Y., and Haffner, P. (2001).
Gradient-based learning applied to document recogni-
tion. In Intelligent Signal Processing, pages 306–351.
IEEE Press.
Masci, J., Giusti, A., Ciresan, D. C., Fricout, G., and
Schmidhuber, J. (2013). A fast learning algorithm for
image segmentation with max-pooling convolutional
networks. arXiv preprint arXiv:1302.1690.
Nowozin, S. (2014). Optimal decisions from probabilis-
tic models: the intersection-over-union case. In Com-
puter Vision and Pattern Recognition (CVPR).
Scharwaechter, T., Enzweiler, M., Franke, U., and Roth, S.
(2013). Efficient multi-cue scene segmentation. In
German Conference on Pattern Recognition (GCPR),
Lecture Notes in Computer Science, pages 435–445.
Torralba, A. (2003). Contextual priming for object de-
tection. International Journal of Computer Vision
(IJCV), 53(2):169–191.
Zhang, C., Wang, L., and Yang, R. (2010). Semantic seg-
mentation of urban scenes using dense depth maps. In
Daniilidis, K., Maragos, P., and Paragios, N., editors,
European Conference on Computer Vision (ECCV),
pages 708–721.
ConvolutionalPatchNetworkswithSpatialPriorforRoadDetectionandUrbanSceneUnderstanding
517
