
PGP2X: Principal Geometric Primitives Parameters Extraction
Zahra Toony, Denis Laurendeau and Christian Gagné
Computer Vision and System Laboratory, Department of Electrical and Computer Engineering,
Université Laval, Québec, QC, Canada
Keywords:
Parameter Extraction, Geometric Primitives, Principal Component Analysis.
Abstract:
In reverse engineering, it is important to extract the 3D geometric primitives that compose an object. It is
also important to find the values of the parameters describing each primitive. This paper presents an approach
for the estimation of the parameters of geometric primitives once their type is known using 3D information.
The primitives of interest are planes, spheres, cylinders, cones, tori and partial instances of the latter four
types. The proposed approach extends methods found in the literature for planes, spheres, cylinders and
cones and proposes a new method for dealing with tori. The results of the proposed method are compared to
approaches found in the literature as well as with ground truth values. The proposed method can be applied to
the estimation of parameters of geometric primitives of synthetic CAD models as well as for models of real
objects acquired with 3D scanners.
1 INTRODUCTION
Recognizing 2D objects and finding their primitives
was one of the most popular topics in computer vi-
sion and still remains a challenging task. Accurate
3D scanners have started a challenging domain of re-
search in object detection and recognition which con-
sists of recognizing objects based on their geometry
rather than their appearance. Such 3D sensors cap-
ture the geometry of the objects and allow the type
of 3D objects to be recognized and their descriptive
parameters to be estimated.
Estimating the parameters of 3D models can be
helpful in different applications such as reverse en-
gineering, 3D model retrieval, and classification of
3D models. Some methods have been proposed to
recognize different types of primitives (Toony et al.,
2014; Osada et al., 2002; Kazhdan et al., 2003; Zhu
et al., 2012). Once a primitive has been recognized,
we need an approach to extract the parameters of each
primitive. Some methods, (Attene et al., 2006; Attene
and Patanè, 2010; Fayolle and Pasko, 2013), first fit a
primitive model to the data and then find the parame-
ters of the model. Our goal is to extract the primitive
parameters directly from the original model without a
fitting process. The motivation of our work is to es-
timate the parameters of the principal types of primi-
tives encountered in reverse engineering applications
and object modelling. Since 95% of industrial objects
can be described by spheres, planes, cones, cylinders,
and tori (Rabbani and Van Den Heuvel, 2005), we
proposean approach for estimating the descriptivepa-
rameters of these types of primitives.
The rest of the paper is organized as follows. Re-
lated work is presented in Section 2. The proposed
approach for extracting the parameters of each prim-
itive type is explained in detail in Section 3. Section
4 presents experimental results and demonstrates the
efficiency of our approach in different situations and
in comparison with other methods. Section 4 also
presents results obtained on real scans of 3D objects
composed of the primitives of interest. Finally, we
conclude the paper in Section 5.
2 RELATED WORK
In order to estimate the parameters of primitives, dif-
ferent approaches can be considered. The methods
that have been proposed so far can be divided into two
categories. The first category consists of techniques
that segment the model at first and then determine the
type of each segment as well as their descriptive pa-
rameters. Authors usually use different primitives in
order to identify the type of each segment. The sec-
ond category contains methods which start directly
from the original model without any pre-processing
such as segmentation. These methods apply a fitting
process to identify the type of primitive and then the
81
Toony Z., Laurendeau D. and Gagné C..
PGP2X: Principal Geometric Primitives Parameters Extraction.
DOI: 10.5220/0005356400810093
In Proceedings of the 10th International Conference on Computer Graphics Theory and Applications (GRAPP-2015), pages 81-93
ISBN: 978-989-758-087-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

parameters of the best fitted primitive are returned.
Our approach deals with original models without any
pre-processing but the assumption is made that the
model contains only one primitive which can be in the
first category but without a prior segmentation pro-
cess. Since several methods have been proposed to
determine the type of primitives, (Toony et al., 2014;
Osada et al., 2002; Kazhdan et al., 2003; Zhu et al.,
2012), in this paper, we assume that the type of each
primitive is known and focus on an accurate estima-
tion of primitive parameters.
The methods in the first category require a seg-
mentation step and a non-linear fitting approach with
reliable initial seeds. One of the methods in this cat-
egory, presented in (Lukács et al., 1998), uses a seg-
mentation approach based on initial seeds and region
growing. The segmentation and fitting stop based on
the fitting error. This method works for spheres, cylin-
ders, cones, and tori. The method is sensitive to the
choice of the initial seed and is also very time con-
suming.
Another approach in this category is presented in
(Benko et al., 2002). The authors assume that the in-
put point cloud is already segmented into primitives
and the type of primitive is already known. They sup-
pose that there is a set of parametrized objects for
which the parameters need to be estimated. They con-
sider some “primary objects” such as surfaces, curves,
etc. and some “auxiliary objects” that describe the
constraints between primary objects. A fitting process
is used in order to find the parameters of the primary
and auxiliary objects.
In the paper presented in (Fayolle and Pasko,
2013), which belongs the first category, the authors
use a set of primitives from a user-specified list of
primitives. They then fit these primitives and extract
the points that correspond to the best fitted primitive
and the parameters are obtained from the best fit. The
list of primitives includes spheres, cylinders, planes,
tori, cones, and super-ellipsoids.
The approaches in the second category extract the
primitives directly from the input point cloud using
RANSAC-based methods for instance (Li et al., 2011;
Schnabel et al., 2007; Bolles and Fischler, 1981; Fis-
chler and Bolles, 1981). In (Schnabel et al., 2007), an
automatic method is presented based on random sam-
pling which detects planes, spheres, cylinders, cones,
and tori. This RANSAC-based method is time con-
suming like all random based methods and it also de-
pends on the selected points. The method presented in
(Olson, 2001) is splitting and pruning the parametric
space in order to implement a faster algorithm. Some
other methods use the Gaussian sphere for extracting
primitives (Chaperon et al., 2001; Rabbani and Van
Den Heuvel, 2005; Liu et al., 2013).
The methods presented in (Borrmann et al., 2011;
Kotthäuser and Mertsching, 2012) are extracting
planes only but other methods are proposed to extract
cylinders (Bolles and Fischler, 1981; Lozano-Perez
et al., 1987; Chaperon et al., 2001; Rabbani and Van
Den Heuvel, 2005; Liu et al., 2013).
A hierarchical fitting approach which deals di-
rectly with input data is introduced in (Attene et al.,
2006) and (Attene and Patanè, 2010). The method
presented in (Attene et al., 2006) produces a bi-
nary tree of primitives, extracting planes, spheres,
and cylinders. Another approach (Attene and Patanè,
2010) exploits more accurate hierarchical clustering
in order to extract more primitives such as planes,
spheres, cylinders, cones, and tori. Since we compare
our results with these approaches, they are described
in detail in the following section.
2.1 A Review of Two Hierarchical
Fitting Approaches
2.1.1 Method Proposed in (Attene et al., 2006)
The basic idea of the method presented in (Attene
et al., 2006) is to merge neighboring triangles into
representative clusters. The idea is to build a dual
graph from the input mesh model. At the beginning
of the algorithm, each node of the graph represents a
cluster. The authors assign a weight to each edge of
the graph. They then build a priority queue based on
the edges’ weights and they merge the edges with the
minimum weights in the priority queue. After each
merging operation, edge weights and clusters are up-
dated. The algorithm stops based on some criteria.
Fitting is applied to each cluster and the primitive
which has the minimum evaluation error is selected.
Planes, spheres, and cylinders are considered. To
extract planes, the authors use a classical method
based on PCA (Principal Component Analysis) (Gar-
land et al., 2001; Cohen-Steiner et al., 2004). First the
covariance matrix of each cluster is computed. The
normal of the plane is the eigenvector corresponding
to the smallest eigenvalue of the covariance matrix.
The fitting error is calculated afterwards.
In order to find the parameters of the spheres (ra-
dius and location of the center), several different radii
and centers are tested and those that minimize the dis-
tance between the points and the fitted sphere are se-
lected. These parameters can be found by solving a
Gauss-Newton minimization problem (Scales, 1985)
but, as mentioned in the paper (Attene et al., 2006),
this is a time consuming process so an algebraic dis-
tance approach (Pratt, 1987) has rather been used to
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
82
P
n
c
r
c
r
h
c
r
h
c
R
r
d
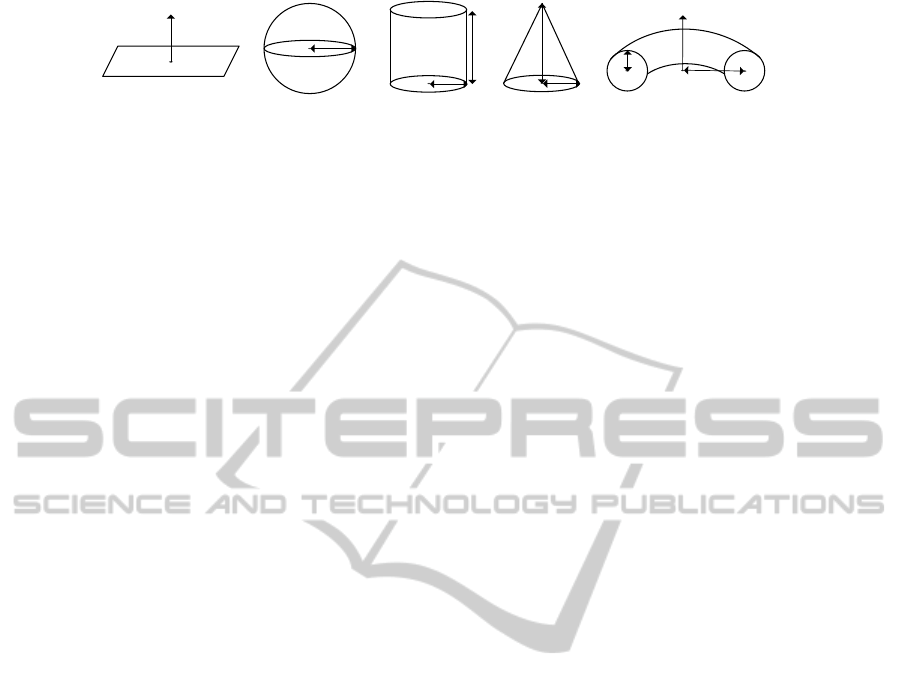
(a) (b) (c) (d) (e)
Figure 1: The parameters extracted for: (a) plane, (b) sphere, (c) cylinder, (d) cone, and (e) torus.
determine the sphere’s parameters.
For cylinders, the parameters that need to be es-
timated are the radius, the axis direction, and a point
belonging to the axis which is called the center. In
order to estimate the axis direction, they first compute
a covariance matrix on the edges of the dual graph.
Then, they select the eigenvector related to the largest
eigenvalue of the covariance matrix as the axis of the
cylinder. A plane is then defined with a normal in the
same direction of the axis of the cylinder and a point
as the center of mass of the cylinder points. Then, all
points of the cylinder are projected onto the plane and,
using a direct circle fitting approach, the radius and
the center location of the created circle on the plane
are computed. Finally the fitting error is calculated.
2.1.2 Method Proposed in (Attene and Patanè,
2010)
In this method, the authors consider spheres, planes,
cylinders, cones, and tori. They present an algorithm
to convert a 3D surface into a hierarchical represen-
tation. A k-nearest neighbor graph is built on the in-
put point-set which is a time consuming process. The
procedure for estimating the parameters of planes and
spheres is the same as the one presented in (Attene
et al., 2006). For cylinders, the Gaussian sphere con-
cept is used. First the normals of the cylinders are
mapped on the Gaussian sphere, the axis of the cylin-
der is found using PCA. A plane is then mapped on
the points located on the Gaussian sphere and, finally,
all of these points are projected onto the plane and a
direct circle fitting approach is used to find the radius
of the projected circle.
For cones, the normals are mapped on the Gaus-
sian sphere and a plane is fitted on the normals. PCA
is used to find the normal vector to the plane. The
apex of the cone is found using a minimization pro-
cess and, finally, the semi-apical angle that shows the
deviation of the cone surface from the axis is com-
puted.
For tori, a center point, a height vector and a ra-
dius are calculated. The curvature properties of the
torus are used to estimate the height vector and the
small radius of the torus. Each point of the torus is
moved on the opposite direction of its normal with
a signed distance obtained from the curvature value.
So, all of the points are placed on a circular axis.
The plane passing through the transformed points is
then found. The direction of the plane’s normal is the
height vector. These transformed points are projected
onto the plane, and the center and the radius are found
by applying a circle fitting algorithm on the projected
points.
In this paper, we compare our results with (At-
tene and Patanè, 2010)’s method and also with the
result of a non-linear least-squares fitting algorithm
of the LSGE library developed for fitting primitives
(LSGE, 2004). In our method, we extract the param-
eters of planes, spheres, cylinders, cones, and tori as
well as partial instances of the former four types of
primitives. The methodology for extracting the pa-
rameter values of each type of primitive is detailed in
the following section.
3 PROPOSED METHOD (PGP2X)
Regardless of the type of input data, mesh or point
cloud, we estimate the normal at each vertex of each
primitive. If the model is a mesh, we consider the
normal at a vertex as the average between the nor-
mals of its connected faces. The normal to a tri-
angular face is the cross product of its two adjacent
sides. If the model is a point cloud, we compute the
normal at each point using the method presented in
(Zhang et al., 2013) which is a robust normal esti-
mation method based on a low-rank subspace clus-
tering approach. A covariance analysis of the neigh-
borhood is used to find the smooth and sharp regions
around the points. A guiding matrix using an un-
supervised learning process based on neighborhood
features is built. Finally, the anisotropic neighbor-
hoods are segmented into some isotropic neighbor-
hoods using the guiding matrix and the low-rank sub-
space clustering approach. For a point near smooth
regions, the normal can be obtained easily and accu-
rately but for points near sharp regions, the normal is
estimated as the normal of a fitted plane to the consis-
tent sub-neighborhoods (Zhang et al., 2013).
Now that the procedure for obtaining the normals
to the vertices has been presented and the type of each
primitive is known, we go through the details of pa-
rameter extraction for each primitive. The primitives
PGP2X:PrincipalGeometricPrimitivesParametersExtraction
83

(a) (b) (c)
Figure 2: (a) Real scanned plane with vertices and normals,
(b) principal components obtained from vertices, (c) fitted
plane using the normal obtained from PCA and the median
of vertices as the point.
that are considered in this paper are planes, spheres,
cylinders, cones, and tori as well as partial models
of the latter four types of primitives. Based on the
method presented in (Toony et al., 2014), the type of
primitive is found. The parameters are extracted for
each primitive type are listed in figure 1.
3.1 Plane
The parameters of a plane are the normal to the plane,
~n, as well as a point p lying on the plane (figure 1 (a)).
In order to find the normal to the plane, a good method
is the Principal Component Analysis (PCA). We ap-
ply the PCA on the vertices of the input data. The
eigenvector corresponding to the smallest eigenvalue
is selected as the normal to the plane. The median of
the points is chosen as a point lying on the plane.
Figure 2 presents a scanned plane. Part (a) shows
the plane with vertices and normals; the principal
components are presented in part (b) and, finally, the
fitted plane using the normal extracted from PCA and
the median of the points are shown in part (c).
3.2 Sphere
The parameters that need to be extracted for a sphere
are the center c and the radius r (see figure 1 (b)). In
order to estimate the two parameters, different meth-
ods can be used. The simplest but the most time con-
suming is the fitting approach. In this paper we rather
use a fast method which relies on four non-coplanar
points (Schmitt, 2005). A sphere can be extracted
uniquely from four points if they are not on the same
plane (Schmitt, 2005). The details of the approach are
presented in the following:
1. In order to have four non-coplanar points, we
select three non-collinear points P
1
,P
2
, and P
3
.
Then we find the plane passing through these three
points and the fourth point is the one whose dot
product with the plane’s normal is nonzero, mean-
ing that this fourth point is non-coplanar with the
other three points.
2. Once four points have been selected, we need to
solve the following determinant equation:
x
2
+ y
2
+ z
2
x y z 1
x
2
1
+ y
2
1
+ z
2
1
x
1
y
1
z
1
1
x
2
2
+ y
2
2
+ z
2
2
x
2
y
2
z
2
1
x
2
3
+ y
2
3
+ z
2
3
x
3
y
3
z
3
1
x
2
4
+ y
2
4
+ z
2
4
x
4
y
4
z
4
1
= 0. (1)
3. This determinant can be written as:
(x
2
+y
2
+z
2
) M
11
−xM
12
+yM
13
−zM
14
+M
15
= 0.
(2)
4. Considering x
2
+ y
2
+ z
2
= r
2
, we write the sphere
equation as follows:
(x− x
0
)
2
+ (y− y
0
)
2
+ (z− z
0
)
2
− r
2
0
= 0. (3)
5. After equating the expansion of equation 3 with
equation 2, the parameters of the sphere are ob-
tained as,
x
0
= +0.5
M
12
M
11
, y
0
= −0.5
M
13
M
11
, z
0
= +0.5
M
14
M
11
,
r
0
= x
2
0
+ y
2
0
+ z
2
0
−
M
15
M
11
.
(4)
see (Schmitt, 2005) for the definition of each M
1i
.
3.3 Cylinder
For a cylinder, we need to extract the direction of the
axis,
~
d, the height of the cylinder, h, the center, c, and
the radius, r, of the basis as presented in figure 1 (c).
The proposed method to estimate the parameters of
cylinders is presented in the following steps:
1. Map all normals of the cylinder on the Gaussian
sphere. This creates a great circle on the sphere.
2. Find the plane passing through the normals. To
achieve this, we apply PCA on the normals and
we select the vector corresponding to the small-
est eigenvalue as the normal to the plane which is
the direction of the cylinder’s axis,
~
d. Selecting
one of the points on the Gaussian sphere and the
normal direction of the plane, we have the plane
that is passing through the normals on the Gaus-
sian sphere.
3. Once the plane has been determined, all points of
the cylinder are projected onto the plane which cre-
ates a circle on the plane.
4. In order to obtain the radius of the circle, most
methods, such as the one proposed by Attene
in (Attene et al., 2006) and (Attene and Patanè,
2010), use direct circle fitting. In this paper, we
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
84

(a) (b) (c)
(d) (e) (f)
Figure 3: Extracting the parameters of a cylinder: (a) 3D
model of a cylinder with its normals; (b) normals of the
cylinder on the Gaussian sphere; (c) the fitted plane on the
normals; (d) projected points on the plane and the result
of Taubin’s circle fitting; (e) projected cylinder points on
the plane’s normal (axis vector), the blue point shows the
minimum value; and (f) the basis of the cylinder with it’s
center (green dot).
rather use Taubin’s method (Taubin, 1991) to esti-
mate the radius. Taubin’s method is fast and robust
and it works well even in the case of a partial circle
with a small arc (Chernov, 2009). Taubin’s method
is more stable than the circle fitting approach pro-
posed by Kasa (Kasa, 1976) and is faster than the
direct circle fitting by Pratt (Pratt, 1987).
5. To estimate the center of the cylinder, if the 2D
center of the Taubin’s fitted circle is transformed
into 3D, it returns a point on the axis vector, as
in Attene’s method, but is not exactly the center
of the cylinder base. So, we first determine the
points right at the base of the cylinder and then
we extract the center. To achieve this, all points
on the cylinder are projected onto the axis vec-
tor and the minimum projected value is found.
Afterwards, all cylinder points whose projected
values are in a small neighborhood of the mini-
mum value are selected. This creates a circle as
shown in figure 3. Then, three points on this circle
are chosen, knowing the radius r
0
from the pre-
vious step, the general circle equation is solved,
(x − x
0
)
2
+ (y − y
0
)
2
+ (z − z
0
)
2
= r
2
0
, to find the
center,c = (x
0
,y
0
,z
0
),of the cylinder base.
6. In the last step, to find the height of the cylinder,
the difference between the min and the max values
of the projected points on the axis vector are found
and the height is computed as h = max − min.
3.4 Cone
The parameters of a cone that need to be extracted are
the axis direction,
~
d, the height of the cone, the radius,
r, and the center of the cone base, c. In the following
(a) (b) (c)
(d) (e) (f)
Figure 4: Extracting the parameters of a cone: (a) 3D model
of a cone with its normals; (b) normals of the cone on the
Gaussian sphere; (c) the fitted plane on the normals; (d)
projected points on the plane with Taubin’s circle fitting;
(e) projected cone points on the plane normal (axis vector),
the blue point shows the minimum value; and (f) the base
of the cone with its center (green dot).
we explain the details of our approach to extract these
parameters:
1. The first step is similar to the case of cylinders and
consists in mapping all normals of the cone on the
Gaussian sphere. This creates a small circle on the
sphere (figure 4 (b)).
2. A plane is fitted through the normals. The direc-
tion of the plane’s normal is the direction of the
axis vector.
3. All of the 3D points of the cone are projected
onto the plane which creates several circles. Us-
ing Taubin’s method, circles are fitted and the one
with the greatest radius is selected.
4. To estimate the height of the cone, all 3D points are
projected onto the axis vector, and the difference
between the minimum and the maximum projected
values is considered as the height of the cone.
5. In order to estimate the center of the cone base,
the base of the cone must be estimated first, as
for cylinders. In a case of an upward cone, all
3D points correspondingto the minimum projected
value on the axis direction, or the points related
to the maximum projected value, in the case of a
downward cone, are located on the cone base. For
the estimation to be independent from the direc-
tion of the cone, the points in a small neighbor-
hood of the minimum and the maximum projected
values on the axis direction are selected. So, two
sets are considered, one around the minimum pro-
jected value and the other one includes the points
around the maximum projected value. The set that
consists of one point, the apex, is rejected. As for
cylinders, knowing the radius and three points of
PGP2X:PrincipalGeometricPrimitivesParametersExtraction
85

the base, the circle equation is solved in order to
determine the center of the cone base.
This procedure is applied on a cone that is presented
in figure 4.
3.5 Torus
Estimating the parameters of the torus primitive is the
most challenging task of primitive parameter extrac-
tion. In fact, approaches reported in the literature fol-
lowing the research presented by (Attene and Patanè,
2010) have failed. However, here, we present a novel
algorithm to extract the parameters of a torus. The
method is accurate for different instances of tori. The
parameters to be extracted are the direction vector,
~
d,
which is orthogonal to the torus model, the center, c,
the radius for the great circle, R, and the radius for the
small circle, r. In the following we explain the de-
tails of the approach that is proposed to extract these
parameters:
1. PCA is applied on the 3D points of the torus
model. The eigenvector corresponding to the
smallest eigenvalue is considered as the direction
vector,
~
d.
2. A plane is located with
~
d as its normal vector and
the point that is the average of the points on the
torus. This point is considered as the center, c, of
the torus.
3. All 3D points of the torus are projected onto
the plane. This produces several circles. Using
Taubin’s method, the parameters of these circles
are found. The smallest and the greatest radii, r
1
and r
2
respectively, are used to compute the radii
of the torus model. As presented in figure 5 (d),
the two radii, r
1
and r
2
are used to compute R and
(a) (b)
r
2
r
1
R
r
(c) (d)
Figure 5: Extracting the parameters of a torus: (a) 3D model
of a torus with its normals; (b) 3D points of the torus with
the PCA fitted plane and the direction vector; (c) projected
points on the plane with the greatest and smallest fitted cir-
cles, red and blue circles respectively; and (d) two new radii,
r
1
and r
2
are used to compute R and r.
r, with the following equations:
R = r
1
+
r
2
− r
1
2
=
r
1
+ r
2
2
, (5)
r =
r
2
− r
1
2
. (6)
This methodology works well for complete CAD
models or real scans of complete tori. However, for
partial tori, especially small ones, the eigenvector cor-
responding to the smallest eigenvalue is not always
the vector perpendicular to the model. To deal with
such cases, the three principal components of the
points on the models are computed. The vector as-
sociated with each component is considered in turn
as the normal to the torus plane which produces three
different projection results. Figure 6 depicts these dif-
ferent projections.
In order to identify the right plane, for each of
these three conditions, the points outside of a mar-
gin distance ε to the plane are ignored and then the
distance of the remaining points to the plane are cal-
culated. When the diagram of the sorted distances
for each plane is plotted, the three diagrams in figure
7 plot (a)-(c) are obtained. For a torus model, espe-
cially CAD models, the points on the torus are located
on circles but on different levels. We thus have sev-
eral points at the same distance to the plane and then
another series of points with a different common dis-
tance to the plane and so on for the different levels.
The difference of sorted distances shows many zero
valuesin the diagram with sharp steps which is caused
by the points with the same distance to the plane. If
the plane is the right one, with the normal perpendic-
ular to the model, the diagram of differences of dis-
tances has several zeros and sharp peaks. However
(b) (c) (d)
(a) (e) (f) (g)
Figure 6: Finding the right direction of the plane for a par-
tial torus: (a) the 3D CAD model of a partial torus with
its three principal components; (b) selecting the eigenvec-
tor corresponding to the smallest eigenvalue as the normal
to the plane; (c) selecting the eigenvector corresponding to
the second smallest eigenvalue as the normal to the plane;
(d) selecting the eigenvector corresponding to the largest
eigenvalue as the normal to the plane; and (e)-(g) projecting
3D points on the plane presented in (b), (c), and (d) respec-
tively.
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
86

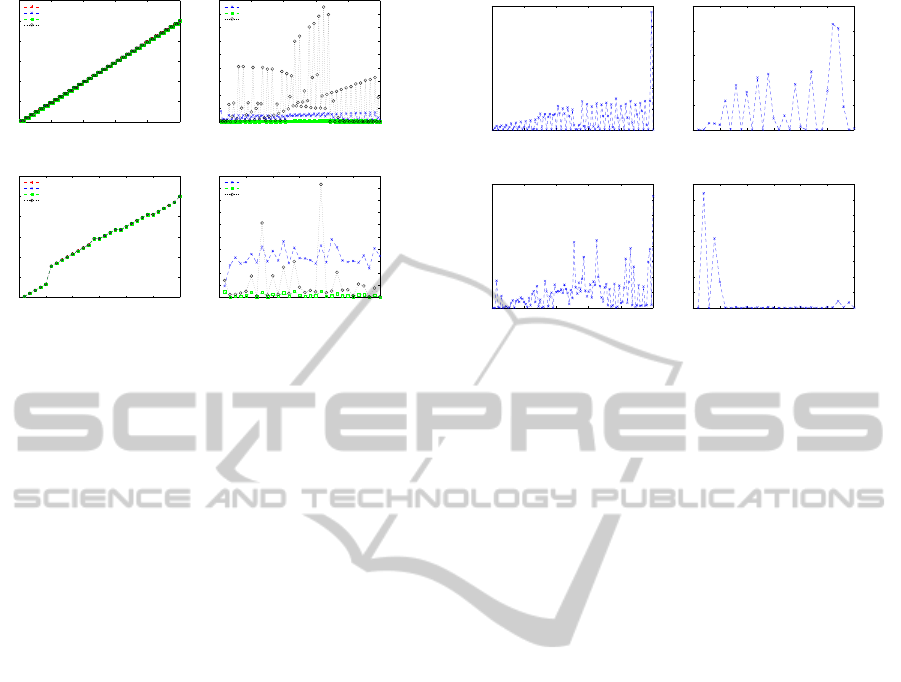
(a) (b) (c)
(d) SF M = 0.0236 (e) SF M = 0.0001 (f) SF M = 0.0171
Figure 7: Diagram of the distances to the plane: (a)-(c) di-
agrams of the distances to the planes presented in figure 6
(b)-(d), respectively; while (d)-(f) show difference of dis-
tances between contiguous points of the diagrams presented
in plot (a)-(c), respectively. The spectral flatness value is
calculated for the difference of distances diagrams, plot (d)-
(f) and the values are presented for each diagram. The min-
imum value ((e) in this case) corresponds to the right direc-
tion of the plane.
if the plane is the wrong one, there is no regularity
between the distance of points from the plane. The
flatness of the diagram of differences of distances can
be considered as a measure that can be used to find the
right plane. This regularity is more observable when
the model is a CAD model as it is the case for fig-
ure 7. However, the approach has also been applied
successfully to real scanned models.
When the plane is the wrong one, there is no
regularity in the distribution of the distances of the
points to the plane. The Kurtosis of the difference of
distances diagram or its flatness are parameters that
could be used to find the most regular one. Based on
our experiments, flatness has demonstrated to be more
efficient than Kurtosis. For this reason, the Spectral
Flatness Measure (SFM) (Johnston, 1988) was used
to estimate the flatness. SFM is obtained by com-
puting the ratio between the geometric mean of the
diagram and the arithmetic mean of the diagram:
SFM =
N
s
N
∏
i=1
y
i
N
∑
i=1
y
i
N
(7)
where, N + 1 is the number of points, y
i
is the dif-
ference of distance to the plane between point i and
i+ 1.
(a) (b)
Figure 8: Finding the parameters of the circles for the par-
tial torus of figure 6 using (a) Taubin’s method and (b) the
RCD approach. The results show that Taubin’s method is
not suitable for two partial circles while the RCD approach
is able to extract the parameters correctly.
Using the spectral flatness, the direction vector
of the torus model,
~
d, can be found for both com-
plete and partial models. Once the plane is obtained,
the points within a small margin distance ε to the
plane are selected and are projected onto the plane.
For a complete torus, this creates two full circles and
Taubin’s method can be used to find the radius of the
two circles and, using equation 5 and 6, the two radii
of the torus can be computed. For partial models only
two partial circles are observed and Taubin’s method,
which also works in the case of a single partial circle,
fails to find the correct radii since there are two par-
tial circles. The Randomized Circle Detection (RCD)
method can be used instead (Chen and Chung, 2001).
Figure 8 shows that the Taubin’s method fails for the
partial torus of figure 6 but works well for a complete
torus as observed in figure 5 plot (c).
RCD can also be applied to full circles but since
Taubin’s method is fast and accurate, RCD is only
used in the case of partial tori. In order to decide
which approach to be used, Taubin’s method is ap-
plied first and then the small and great circles are
found. The points located on these two circles are re-
moved. If more than 30% of the points remain, RCD
is used instead.
The Randomized Circle Detection (Chen and
Chung, 2001) was introduced for detecting circles
on images. Here, the RCD is used to detect circles
made of 2D points, which are 3D points projected
on a plane. RCD begins with a set of pixels V, and
then selects three non-collinear points, v
1
,v
2
, and v
3
.
The fourth point, v
4
, is selected such that it is non-
collinear with two of the three other points. Then, the
parameters of four circles, C
ijk
, obtained by each of
the three points, (x − a
ijk
)
2
+ (y − b
ijk
)
2
= r
ijk
, are com-
puted as follows:
a
ijk
=
x
2
j
+ y
2
j
− (x
2
i
+ y
2
i
) 2(y
j
− y
i
)
x
2
k
+ y
2
k
− (x
2
i
+ y
2
i
) 2(y
k
− y
i
)
4((x
j
− x
i
)(y
k
− y
i
) − (x
k
− x
i
)(y
j
− y
i
))
, (8)
PGP2X:PrincipalGeometricPrimitivesParametersExtraction
87

b
ijk
=
2(x
j
− x
i
) x
2
j
+ y
2
j
− (x
2
i
+ y
2
i
)
2(x
k
− x
i
) x
2
k
+ y
2
k
− (x
2
i
+ y
2
i
)
4((x
j
− x
i
)(y
k
− y
i
) − (x
k
− x
i
)(y
j
− y
i
))
, (9)
r
ijk
=
q
(x
l
− a
ijk
)
2
+ (y
l
− b
ijk
)
2
, for any l = 1, 2,3,4.
(10)
Once the parameters of the four circles,C
123
,C
124
,
C
134
, and C
234
, are found, the distance between point
v
i
, i = 1, 2, 3, 4 to the circle obtained from the
three other points is computed: d
1
→ C
234
, d
2
→ C
134
,
d
3
→ C
124
, and d
4
→ C
123
. If one of these distances is
less than a threshold, T
d
, the four points are called co-
circular (Chen and Chung, 2001) and the three pixels
composing the circle are referred to as agent pixels.
The distance between each pair of agent points must
be greater than a threshold, T
a
.
If all these conditions are satisfied, the number
of points, n
p
that are lying on the circle obtained by
agent pixels are found. If n
p
is larger than a global
threshold T
g
, the circle is considered as a true circle
and all the points that are lying on this circle are re-
moved from set V. The algorithm iterates until only a
small number of points remain in set V.
Since this approach requires that several parame-
ters be set, it was modified by removing some thresh-
olds and some steps are also changed so the algo-
rithm adapts to our application. Eliminating several
thresholds of the original RCD method decreases the
number of failures and makes the algorithm converge
faster while maintaining the same level of accuracy.
In the following, the modified RCD approach is ex-
plained:
1. Suppose V to be a set of input points (pixels),
which is a set of projected 3D points on the plane.
First, the counters and thresholds are initialized as
follows:
f: failure counter is set to 0.
T
f
: failure threshold, maximum number of failures
that are tolerated by the algorithm.
T
min
: the minimum number of points that can
remain in set V in order to stop the algorithm.
T
p
: the distance threshold between each point and
the fitted circle.
2. If f = T
f
or |V| < T
min
, the algorithm stops; other-
wise four pixels are selected from set V so they are
co-circular.
3. The four possible circles associated with these four
points are computed and then the number of points
lying on the circles are identified. To achieve this,
the distance between each point in set V and each
circle is determined. The number of points, N
p
,
whose distance is less than threshold T
p
is stored.
4. The circle with the largest N
p
is selected as the best
fitted circle. If N
p
is less than one percent of V, the
failure counter f is incremented by one and the al-
gorithm returns to step 1. If N
p
is greater than 45%
of V, the sum of distances from the best fitted cir-
cle is computed and divided by N
p
. If this value is
less than ε
p
, the circle is selected as the true circle,
the circle’s parameters are stored and all points in
V lying on the circle are removed and one returns
to step 1.
With the above procedure the great and small radii
of the torus, R and r, and the axis direction,
~
d can be
estimated. The other parameter that remains to be ex-
tracted is the center of the torus. Using either RCD
or Taubin’s method, we have the centers of the cir-
cles on the plane, c
x
and c
y
, while we need to extract
the center of the torus in 3D. As mentioned before,
all points of the torus were projected onto a plane
whose normal is
~
d. This vector is one of the eigen-
vectors of the PCA, so the two other eigenvectors,
~
A
and
~
B, are the vectors lying on the plane onto which
the torus points are projected. If we consider (x, y, z)
as the coordinates of torus points,
~
d = (d
1
, d
2
, d
3
),
~
A = (a
1
, a
2
, a
3
), and
~
B = (b
1
, b
2
, b
3
) as the PCA
eigenvectors, the projection of points on these vectors
are expressed as follows:
a
1
a
2
a
3
b
1
b
2
b
3
d
1
d
2
d
3
x
y
z
=
a
1
x+ a
2
y+ a
3
z
b
1
x+ b
2
y+ b
3
z
d
1
x+ d
2
y+ d
3
z
(11)
so, considering M =
a
1
a
2
a
3
b
1
b
2
b
3
d
1
d
2
d
3
we have,
x
y
z
= M
−1
a
1
x+ a
2
y+ a
3
z
b
1
x+ b
2
y+ b
3
z
d
1
x+ d
2
y+ d
3
z
= M
−1
x
′
y
′
z
′
.
(12)
(x
′
, y
′
, z
′
) are the coordinates of the projection of
(x, y, z) on
~
d,
~
A, and
~
B, respectively. All values of ma-
trix M are know. The x-coordinate and y-coordinate
of the circles center, c
x
and c
y
respectively, are the
same as the x and y coordinates of the torus center,
so, x
′
= c
x
and y
′
= c
y
. The only missing param-
eter is z
′
which is exactly the mean value of the torus
points projected on
~
d. Now, using equation 12 the 3D
coordinate of the torus center, (x, y, z)can be com-
puted.
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
88

0 10 20 30 40 50 60 70 80 90 100
0
20
40
60
80
100
120
Model number
Radius
Ground Truth
PGP2X
Attene Method
LSGE
0 10 20 30 40 50 60 70 80 90 100
0
0.001
0.002
0.003
0.004
0.005
0.006
0.007
0.008
0.009
0.01
Model number
SSD for center
PGP2X
Attene Method
LSGE
(a) (b)
0 10 20 30 40 50 60 70 80 90 100
0
1
2
3
4
5
6
Model number
Run Time(s)
PGP2X
Attene Method
LSGE
0 5 10 15 20 25 30
0
10
20
30
40
50
60
70
80
90
100
Model number
Radius
Ground Truth
PGP2X
Attene Method
LSGE
(c) (d)
0 5 10 15 20 25 30
0
1
2
3
4
5
6
7
8
Model number
SSD for center
PGP2X
Attene Method
LSGE
0 5 10 15 20 25 30
0
1
2
3
4
5
6
7
8
9
Model number
Run Time(s)
PGP2X
Attene Method
LSGE
(e) (f)
Figure 9: Comparison of sphere parameters between ground
truth values, our method (PGP2X), Attene’s method and
LSGE. The first row shows the result for complete spheres
and the second row presents the results for partial spheres.
Plots (a) and (d) compare radius values, the comparison of
the sum of square differences for the center values is pre-
sented in plots (b) and (e). plots (c) and (f) show the run
times for the different approaches.
4 EXPERIMENTAL RESULTS
In order to study the result of our method for differ-
ent models, we prepared 620 CAD models with the
3DsMax software: 100 planes, 100 cones, 100 cylin-
ders, 100 spheres, 100 tori, 30 partial cones, 30 partial
cylinders, 30 partial spheres and, 30 partial tori which
is called GPrimDB (Geometric Primitive Data Base).
We selected the parameters of the models in order to
design small, large, sparse, and dense models (from
1mm to 100mm). The database includes cones with
the cap (100 full cones and 30 partial cones) which
is not used in this paper. In this section, we compare
our parameter detection method with two other ap-
proaches: Attene’s method (Attene and Patanè, 2010)
and LSGE (Least Squares Geometric Element Soft-
ware) (LSGE, 2004). Attene’s method has been ap-
plied for Planes, cones, cylinders, and spheres but it
does not achieve good results for tori. The LSGE uses
least-squares fitting in order to find the parameters of
the primitives. For all primitives, an initial value for
each parameter is required which limits the use of the
algorithm. Consequently, we use Attene’s method re-
sults as the initial values for LSGE for spheres and
cylinders. Since Attene’s method does not achieve
good results for tori, initial values are not available
for torus fitting in LSGE. For cones, Attene’s method
does not return the radius of the base which is one of
the initial values that is required by LSGE.
Since Attene’s method and LSGE perform well
for spheres and cylinders, we compare our results to
these two approaches and to ground truth values. The
parameters that are introduced in section 3.5 are cho-
sen empirically and are set to the following values:
ε: the distance associated with the second peak in the
difference of sorted distances’ diagram, T
f
: 30000,
T
min
: |V| × 0.1, T
p
: 0.5, and ε
p
: 0.3.
Figure 9 presents six diagrams for sphere models.
The first row shows the results of the comparison for
100 complete spheres of the database with respect to
both the radius and the center of the sphere with the
run time of the algorithms. The second row presents
the results for 30 partial spheres of the database. In
order to compare the computed center, (c
′
1
, c
′
2
, c
′
3
),
with the ground truth center, (c
1
, c
2
, c
3
), the Sum of
Square Differences (SSD) is calculated as follows:
SSD =
q
(c
1
− c
′
1
)
2
+ (c
2
− c
′
2
)
2
+ (c
3
− c
′
3
)
2
. (13)
Where the SSD is close to zero, the method is judged
as accurate. The SSD values are presented in the sec-
ond plot for both complete and partial spheres. The
first plots show the computed radii in comparison with
ground truth radii. The run time of the different ap-
proaches is plotted in the last plots. The results show
that all methods perform well for estimating the ra-
dius. For the center, all methods provide good re-
sults. PGP2X for complete spheres varies somewhat
for some models but is significantly more efficient
than other methods in processing time.
For cylinders, Attene’s method and LSGE return
the radius of the cylinder, the direction of the axis and
a point on the axis while PGP2X returns the radius,
the direction axis, the height, and the center of the
base. If the direction axis is not correct, the radius
of the cylinder will not be correct either. In the fol-
lowing, we compare the parameters that are common
to the other approaches and ours. Figure 10, shows
the computed radius and run time for the different ap-
proaches for both complete and partial cylinders.
The results show that all methods perform well for
the radius. PGP2X is slightly slower than the others
since it estimates more parameters (i.e. the exact lo-
cation of the center on the base). We also compare
PGP2X with ground truth values for the height and
center of cylinders. Figure 11 shows the difference
between the computed height and center estimated by
PGP2X and the ground truth values for both complete
PGP2X:PrincipalGeometricPrimitivesParametersExtraction
89
0 20 40 60 80 100
0
20
40
60
80
100
120
Model number
Radius
Ground Truth
PGP2X
Attene Method
LSGE
0 20 40 60 80 100
0
1
2
3
4
5
6
7
8
9
Model number
Run Time(s)
PGP2X
Attene Method
LSGE
(a) (b)
0 5 10 15 20 25 30
0
20
40
60
80
100
120
Model number
Radius
Ground Truth
PGP2X
Attene Method
LSGE
0 5 10 15 20 25 30
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
Model number
Run Time(s)
PGP2X
Attene Method
LSGE
(c) (d)
Figure 10: Comparison of cylinder parameters between
ground truth values, our method (PGP2X), Attene’s method
and LSGE. The first row shows the result for complete
cylinders and the second row presents the results for par-
tial cylinders. Plots (a) and (c) present the comparison for
the radius and plots (b) and (d) show the run times for the
different approaches.
and partial models.
For cone models, Attene’s method (Attene and
Patanè, 2010), identifies the direction of the axis, the
apex and the semi-apical angle which expresses the
deviation of the cone border from the direction of the
axis. The ground truth values of the cones designed
with 3DsMax do not correspond to these parameters.
The rotation of the 3D model is entered as an input
to 3DsMax, so the ground truth axis direction can be
estimated based on the rotation information given by
3DsMax (multiplying the rotation matrix by unit axis
direction (0, 0, 1) ). The semi-apical axis is the arc-
tangent of the cone radius over its height. The posi-
tion of the apex cannot be estimated from ground truth
parameters.
For cones, our approach estimates the center, the
radius of the cone base, the height, and the direction
of the axis plus the semi-apical angle and the position
of the apex. So, in order to make the comparison of
the axis direction computed by different methods, the
SSD is calculated using the ground truth values (see
part (a) in figures 12 and 13 for complete and par-
tial models, respectively). For the semi-apical angle,
Attene’s method and our approach are compared to
ground truth values in part (b) of figures 12 and 13 for
complete and partial models, respectively. For the po-
sition of the apex, we have Attene’s results and our re-
sult without the ground truth values as a reference, so,
we have not provided any comparison for this param-
eter. For the center of the cone base, the heightand the
radius, we compare the results of our method with the
ground truth for both complete and partial models in
0 20 40 60 80 100
0
1
2
3
4
5
6
x 10
−3
Model number
Difference between ground truth height and our result
0 5 10 15 20 25 30
0
0.5
1
1.5
2
2.5
x 10
−3
Model number
Difference between ground truth height and our result
(a) (b)
0 20 40 60 80 100
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
Model number
SSD for center
0 5 10 15 20 25 30
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
Model number
SSD for center
(c) (d)
Figure 11: The difference between ground truth values for
height and center of cylinders and results obtained by our
method (PGP2X). Plots (a) and (c) shows the results of the
complete models (height and center). Plots (b) and (d) show
the results of partial models for height and center, respec-
tively.
figures 12 and 13 in part(c), (d), and (e), respectively.
The run time is presented in part (f) in figures 12 and
13 for both complete and partial models. The results
in figure 12 and 13 show that our method can estimate
more parameters in comparison with Attene’s method
and thus provides a more detailed description of the
primitive. Our results are very close to ground truth
values. The run time of our method is less than At-
tene’s approach even though our approach provides
more parameters.
For torus primitives, since no other method deals
with this primitive, our method is compared to ground
truth values only. Therefore, we present the compari-
son between our method and ground truth in a tabular
manner as the average of the sum of square differ-
ences. Torus models are described by the center, the
great and small radii, and the direction of the axis. For
the center and the direction of the axis, we compute
the average of SSD values for all models and for the
two radii we compute the average of Euclidean dis-
tances between ground truth values and our results.
These results are presented in table 1. The results
show that our method can identify all parameters of
the torus models with an acceptable error.
In order to study our method in the case of real
models, we scanned objects such as a ball (sphere), a
life saver (torus), a pipe (cylinder), and a paper cone.
It is clear that a ball is not a perfect sphere, a life
saver is also not a perfect model since it is slightly
twisted, see figure 14. Since the exact parameters
of these models are not known and there is no easy
means of measuring them in order to verify the accu-
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
90

0 20 40 60 80 100
0
1
2
3
4
5
6
x 10
−4
Model number
SSD for axis direction
PGP2X
Attene Method
0 20 40 60 80 100
−5
0
5
10
15
20
Model number
tg(angle)
Ground Truth
PGP2X
Attene Method
(a) (b)
0 20 40 60 80 100
0
0.005
0.01
0.015
0.02
0.025
Model number
SSD for center
0 20 40 60 80 100
0
10
20
30
40
50
60
70
80
90
100
Model number
Radius
Ground Truth
PGP2X
(c) (d)
0 20 40 60 80 100
−6
−4
−2
0
2
4
6
8
10
12
14
x 10
−4
Model number
Difference between ground truth height and our result
0 20 40 60 80 100
0
2
4
6
8
10
12
Model number
Run Time(s)
PGP2X
Attene method
(e) (f)
Figure 12: Cone parameters comparison between ground
truth values, our method (PGP2X) and Attene’s method.
Plot (a) shows the sum of square differences for the axis di-
rection between PGP2X, Attene’s method and ground truth.
Plot (b) presents the tangent of the angle for PGP2X, At-
tene’s method in comparison with ground truth values. The
comparison for the center, the radius and the height between
PGP2X and ground truth is provided in plots (c)-(e), respec-
tively. Finally plot (f) shows the run time for PGP2X in
comparison with Attene’s approach.
racy of our method, we scanned the objects with the
Creaform Go!Scan 3D handheld scanner, applied our
method to the primitives to identify their parameters
and used the Polyworks inspection software in order
to measure the parameters manually.
For the real sphere, cone, and cylinder, we se-
lected points on the models and used Polyworks’s
primitive fitting function to determine the parame-
ters. Since the software does not provide torus fit-
ting, for the scanned torus, we mapped two spheres
on the model in order to estimate the radii. One
Table 1: Partial and complete torus models parameters er-
ror. The values that are provided in the tables are the av-
erage of differences between ground truth values and our
results. The difference that is computed for the center and
the axis direction is the sum of square distances. The Eu-
clidean distance is computed for the two radii.
Complete Torus Partial Torus
Great Radius 0.0174 0.2226
Small Radius 0.0189 0.0844
Center 1.426× 10
−4
0.2268
Axis Direction 5.933× 10
−7
1.187× 10
−5
0 5 10 15 20 25 30
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Model number
SSD for axis direction
PGP2X
Attene Method
0 5 10 15 20 25 30
−4
−2
0
2
4
6
8
10
Model number
tg(angle)
Ground Truth
PGP2X
Attene Method
(a) (b)
0 5 10 15 20 25 30
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
Model number
SSD for center
0 5 10 15 20 25 30
0
20
40
60
80
100
120
Model number
Radius
Ground Truth
PGP2X
(c) (d)
0 5 10 15 20 25 30
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
Model number
Difference between ground truth height and our result
0 5 10 15 20 25 30
0
2
4
6
8
10
12
Model number
Run Time(s)
PGP2X
Attene method
(e) (f)
Figure 13: Comparison of partial Cone parameters between
ground truth values, our method (PGP2X), and Attene’s
method. Plot (a) shows the sum of square differences for
the axis direction between PGP2X, Attene’s method and
ground truth values. Plot (b) presents the tangent of the an-
gle for PGP2X, Attene’s method in comparison with ground
truth values. The comparison for the center, the radius and
the height between our result and ground truth values is pro-
vided in plots (c)-(e), respectively. Plot (f) shows the run
times for PGP2X in comparison with Attene’s approach.
small sphere inside the torus and one great sphere
around the torus. In absence of ground truth param-
eters, a visual comparison is also provided in figure
14 to assess which method determines the best pa-
rameters for the primitives. The numerical values are
also provided in the same figure. The results indicate
that our method provides parameter values compara-
ble to Polyworks. Our approach functions automati-
cally while Polyworks involves a manual process.
5 CONCLUSION
In this paper, we presented a novel method for com-
puting the parameters of geometric primitives such as
plane, sphere, cylinder, cone, and torus. Most meth-
ods presented in the literature do not provide accurate
results for tori. We compared our method (PGP2X)
with two other approaches in the case of common
primitives (spheres, cylinders and, cones). For tori,
we provided a comparison with ground truth values.
Our method works well for both complete and partial
primitives. The experiments show that our method is
PGP2X:PrincipalGeometricPrimitivesParametersExtraction
91

Scanned model PGP2X result The result obtained with Polyworks
Center = (−1.128, −3.22, 552.079)
Radius = 192.5097
Center = (−0.843, −2.978, 552.789)
Radius = 192.219
Orientation = (−0.0585, 0.701, 0.71)
Height = 81.482, Radius = 45.217
Apex = (6.398, −60.937, 341.699)
Semi − apicalangle = 29.028
Orientation = (−0.091, 0.708, 0.701)
Height = 79.14
Apex = (8.271, −61.816, 341.712)
Semi − apicalangle = 27.603
Orientation = (0, 0, 1)
Height = 100, Radius = 50.008
Center = (−36.159, 72.951, 0)
Orientation = (0, 0, 1)
Height = 100.004, Radius = 50.002
Center = (−36.154, 72.913, −0.001)
Center = (−113.781, −119.821, 487.169)
Great radius = 239.0103
Small radius = 109.309
Center = (−115.658, 125.371, 500.384)
Great radius = 238.857
Small radius = 109.125
Figure 14: Parameter Extraction for real scanned models. The parameters are extracted using our method (PGP2X) and the
Polyworks software. Each row shows the result for one model using both methods.
accurate and performs well even in the case of real
noisy models acquired with 3D sensors.
ACKNOWLEDGEMENTS
This work was supported by the NSERC-Creaform
Industrial Research Chair on 3D Scanning. Z. Toony
was supported by a FRQNT post-graduate schol-
arship. The authors thank Trung-Thien Tran for
providing us with the implementation of Attene’s
method for cylinders and spheres (Attene and Patanè,
2010) and Annette Schwerdtfeger for proofreading
this manuscript.
REFERENCES
Attene, M., Falcidieno, B., and Spagnuolo, M. (2006). Hi-
erarchical mesh segmentation based on fitting primi-
tives. The Visual Computer, 22(3):181–193.
Attene, M. and Patanè, G. (2010). Hierarchical structure
recovery of point-sampled surfaces. In Computer
Graphics Forum, volume 29, pages 1905–1920. Wi-
ley Online Library.
Benko, P., Kós, G., Várady, T., Andor, L., and Martin, R.
(2002). Constrained fitting in reverse engineering.
Computer Aided Geometric Design, 19(3):173–205.
Bolles, R. C. and Fischler, M.A. (1981). A RANSAC-based
approach to model fitting and its application to find-
ing cylinders in range data. In 7th Int. Joint Conf. on
Artificial Intelligence (IJCAI’81), volume 1981, pages
637–643.
Borrmann, D., Elseberg, J., Lingemann, K., and Nüchter,
A. (2011). The 3D Hough transform for plane detec-
tion in point clouds: A review and a new accumulator
design. 3D Research, 2(2):1–13.
Chaperon, T., Goulette, F., and Laurgeau, C. (2001). Ex-
tracting cylinders in full 3D data using a random sam-
pling method and the gaussian image. In Proc. of the
Vision Modelling and Visualization Conf., volume 1,
pages 35–42. Citeseer.
Chen, T.-C. and Chung, K.-L. (2001). An efficient random-
ized algorithm for detecting circles. Computer Vision
and Image Understanding, 83(2):172–191.
Chernov, N. (2009). Circle Fitting by Taubin method. http://
www.mathworks.com/matlabcentral/fileexchange/
22678-circle-fit–taubin-method-. [Online; accessed
January-2009].
Cohen-Steiner, D., Alliez, P., and Desbrun, M. (2004).
Variational shape approximation. In ACM Trans. on
Graphics (TOG), volume 23, pages 905–914.
Fayolle, P.-A. and Pasko, A. (2013). Segmentation of dis-
crete point clouds using an extensible set of templates.
The Visual Computer, 29(5):449–465.
Fischler, M. A. and Bolles, R. C. (1981). Random sample
consensus: a paradigm for model fitting with appli-
cations to image analysis and automated cartography.
Communications of the ACM, 24(6):381–395.
Garland, M., Willmott, A., and Heckbert, P. S. (2001). Hi-
erarchical face clustering on polygonal surfaces. In
Proc. of the 2001 Sym. on Interactive 3D graphics,
pages 49–58. ACM.
Johnston, J. D. (1988). Transform coding of audio signals
using perceptual noise criteria. IEEE Journal on Se-
lected Areas in Communications, 6(2):314–323.
Kasa, I. (1976). A circle fitting procedure and its error anal-
ysis. IEEE Trans. on Instrumentation and Measure-
ment, 1001(1):8–14.
Kazhdan, M., Funkhouser, T., and Rusinkiewicz, S. (2003).
Rotation invariant spherical harmonic representation
of 3D shape descriptors. In Proc. of the 2003 Eu-
rographics/ACM SIGGRAPH Sym. on Geometry pro-
cessing, pages 156–164. Eurographics Association.
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
92

Kotthäuser, T. and Mertsching, B. (2012). Triangulation-
based plane extraction for 3D point clouds. In In-
telligent Robotics and Applications, pages 217–228.
Springer.
Li, Y., Wu, X., Chrysathou, Y., Sharf, A., Cohen-Or, D.,
and Mitra, N. J. (2011). Globfit: Consistently fitting
primitives by discovering global relations. In ACM
Transactions on Graphics, volume 30, page 52.
Liu, Y.-J., Zhang, J.-B., Hou, J.-C., Ren, J.-C., and Tang,
W.-Q. (2013). Cylinder detection in large-scale point
cloud of pipeline plant. IEEE Trans. on Visualization
and Computer Graphics, 19(10):1700–1707.
Lozano-Perez, T., Grimson, W., and White, S. (1987). Find-
ing cylinders in range data. In Proc. of IEEE Intl.
Conf. on Robotics and Automation, volume 4, pages
202–207.
LSGE (2004). LSGE: The Least Squares Geometric El-
ements Library. http://www.eurometros.org/metros/
key_functions/fitting_routines/.
Lukács, G., Martin, R., and Marshall, D. (1998). Faith-
ful least-squares fitting of spheres, cylinders, cones
and tori for reliable segmentation. In 5th European
Conf. on Computer Vision (ECCV’98), pages 671–
686. Springer.
Olson, C. F. (2001). Locating geometric primitives by
pruning the parameter space. Pattern Recognition,
34(6):1247–1256.
Osada, R., Funkhouser, T., Chazelle, B., and Dobkin, D.
(2002). Shape distributions. ACM Transactions on
Graphics (TOG), 21(4):807–832.
Pratt, V. (1987). Direct least-squares fitting of algebraic
surfaces. ACM SIGGRAPH Computer Graphics,
21(4):145–152.
Rabbani, T. and Van Den Heuvel, F. (2005). Efficient
Hough transform for automatic detection of cylinders
in point clouds. Proc. of ISPRS WS on Laser Scan-
ning, 3:60–65.
Scales, L. (1985). Introduction to non-linear optimization.
Springer-Verlag New York, Inc.
Schmitt, S. R. (2005). Center and Radius of a Sphere
from Four Points. http://www.abecedarical.com/
zenosamples/zs_sphere4pts.html.
Schnabel, R., Wahl, R., and Klein, R. (2007). Efficient
RANSAC for point-cloud shape detection. In Com-
puter graphics forum, volume 26, pages 214–226. Wi-
ley Online Library.
Taubin, G. (1991). Estimation of planar curves, surfaces,
and nonplanar space curves defined by implicit equa-
tions with applications to edge and range image seg-
mentation. IEEE Trans. on Pattern Analysis and Ma-
chine Intelligence, 13(11):1115–1138.
Toony, Z., Laurendeau, D., and Gagné, C. (2014). Recog-
nizing 3D principal primitives using gaussian sphere
and gaussian accumulator. Internal Report. Computer
Vision and System Laboratory, Laval University, Au-
gust 2014.
Zhang, J., Cao, J., Liu, X., Wang, J., Liu, J., and Shi,
X. (2013). Point cloud normal estimation via low-
rank subspace clustering. Computers & Graphics,
37(6):697–706.
Zhu, K., Wong, Y. S., Loh, H. T., and Lu, W. F. (2012). 3D
CAD model retrieval with perturbed laplacian spectra.
Computers in Industry, 63(1):1–11.
PGP2X:PrincipalGeometricPrimitivesParametersExtraction
93
