
Component-based Authoring Tool for Haptic Navigation
Takehiko Yamaguchi
2
, Kazuhiro Oshima
1
, Yuto Hirano
2
, Akiyo Makishima
2
,
Testsuya Harada
2
and Paul Richard
3
1
Faculty of Industrial Science and Technology Applied Electronics, Tokyo University of Science,
Niijuku6-3-1, Katsushikaku, Tokyo, Japan
2
The Department of Appliced Electronics, Tokyo University of Science, Niijuku6-3-1, Katsushikaku, Tokyo, Japan
3
Laboratoire Angevin de Recherche en Ingénierie des Systèmes (laris ea 7315), Université d’Angers, Angers, France
Keywords: Haptic Authoring Tool, Haptic Navigation, Component-based IDE, Unity3D.
Abstract: Nowadays, providing a uniform development environment for haptic applications is considered as one of
the critical issues in haptic technologies. Thus, to date, we have developed a component-based haptic
authoring framework using a component capability extension mechanisms supported by Unity3D. Our aim
is to develop a newly revised haptic component to extend our previous framework. The proposed
component enables a user to design haptic interface such as haptic navigation, as well as to help
simulate/investigate the effect of the haptic interaction. In this paper, we present a prototype system and its
capabilities.
1 INTRODUCTION
Nowadays, the field of haptics have grown into
numerous research activities, comprising four
interdisciplinary research branches: human haptics,
machine haptics, computer haptics, and the newly
introduced multimedia haptics (Eid et al., 2007).
As the findings from these research fields, many
haptic devices as well as applications have been
developed for specific purpose such as rehabilitation
(Broeren et al., 2004), training (Feygin et al., 2002),
entertainment (Fyans et al., 2008), education (Bivall
et al., 2011), and so on. In view of this background,
providing a uniform development environment for
haptic applications is considered as one of the
critical issues (Eid et al., 2007).
In fact, having a framework that facilitate the
development process of haptic applications enable
to help novice users since the process remains a time
consuming experience and requires programming
expertise, for instance when adding haptic properties
such as the stiffness, static or dynamic friction (Eid
et al., 2008). Thus, to date, different authoring tools
have been developed.
1.1 Haptic Authoring Tools
Unison is an extensible framework to standardize the
development process of hapto-visual applications.
With this framework, a user is required to develop a
plug-in to install a component into the framework
(El-Far et al., 2004). The Haptik Library is a
software library which enables to provide uniform
access to haptic devices (Pascale and Prattichizzo,
2007). The library does not support higher
capabilities to simulate haptic rendering such as
collision detection so that significant programming
effort is required. Cha et al. (Cha et al., 2007)
proposes an authoring tool that enables to haptically
enhance broadcast contents as well as to provide
viewers via streaming in a VOD context. This
framework supports an only passive haptic
interaction for a user.
HAMLAT is an authoring tool
for haptic application development (Eid et al., 2008).
This framework was designed using the
Blender modeling tools (BlenderFoundation, 1995)
as a main development platform, which enables to
edit a 3D graphical model with haptic interaction.
However, the system does not support an animation,
namely the system implementation is limited to
static scenes.
1.2 Component-based Haptic
Authoring Tool
To date, we have developed a component-based
486
Yamaguchi T., Oshima K., Hirano Y., Makishima A., Harada T. and Richard P..
Component-based Authoring Tool for Haptic Navigation.
DOI: 10.5220/0005357804860491
In Proceedings of the 10th International Conference on Computer Graphics Theory and Applications (GRAPP-2015), pages 486-491
ISBN: 978-989-758-087-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
haptic authoring framework for Unity3D
(Yamaguchi et al., 2014). This framework was
designed as an extensible module using a component
capability extension mechanisms supported by
Unity3D (Unity Technologies, 2005) to
accommodate the range of predictable variation that
will be needed in different specific purpose of haptic
interaction.
Unity3D is one of the most well designed
component-based game development platform that
enables rapid prototyping of high quality 2D/3D
game. It runs on multiplatform such as Mac OS X,
Windows, Linux, android, and even a web browser.
The proposed haptic component in the previous
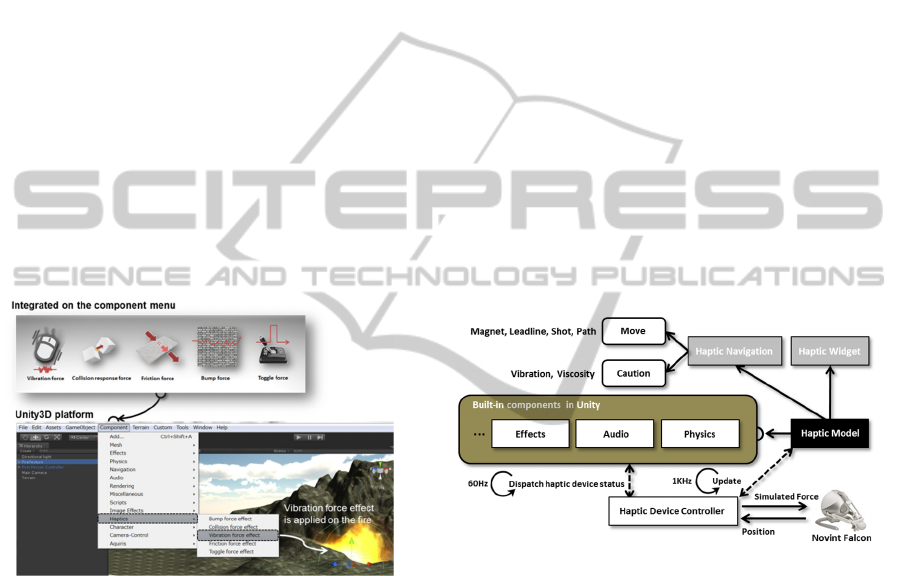
study (Yamaguchi et al., 2014) was integrated in the
Unity Editor (Fig.1). We implemented five primitive
haptic components as a haptic widget such as
Vibration force, Collision response force,
Viscosity force, Bump force, and Toggle force.
These components could be dynamically
added/removed on a game object in Unity game
scene, enabling real time simulation of haptic effect
with visual/audio effect.
Figure 1: The integration of haptic components on the
component menu of Unity3D IDE.
1.3 Newly Developed Haptic
Component
Currently, haptically enhanced interaction mainly
relies on magnetic effects or gradient force effects
(Villard and Capobianco, 2009) in haptic navigation.
These haptic effects enable to enhance user’s spatial
recognition as well as a sense of direction, however
sometimes it decreases performance for example
concerning task selection times (Oakley et al.,
2001).
Although a number of researchers put forth
efforts to overcome usability problem of haptic
interaction in navigation, very little research has
been conducted on the development of user
interface design guidelines or user friendly
features for haptic systems (Yamaguchi et al.,
2009). In this perspective, there is a clear need for
creating an authoring tool that allows to build as
well as to help simulate/ investigate an effect of
haptic interaction in navigation.
Our aim is to develop a haptic component
module which enables to design a haptic user
interface such as haptic navigation to extend our
previous system. In this paper, we present a
prototype system and its capabilities.
2 PROPOSED SYSTEM
2.1 System Framework
The system framework of the proposed system is
shown in Figure 2. The framework consists of two
modules: a “Haptic Device Controller” module and
a “Haptic Model” module. Currently, we utilize a
Novint Falcon
TM
which is a commercially available
3DoF force feedback device produced by Novint
Technologies (Novint Technologies, 2006).
Figure 2: The system framework of the proposed system.
2.2 Haptic Device Controller Module
The “Haptic Device Controller” works as an
interface to the connected haptic device and retrieves
its status as well as dispatches the status to the other
components including the “Haptic Model” module.
The haptic device status includes a grip position
of the haptic device, a button status, and so on.
These statuses are updated at 60Hz. A core thread of
this module is implemented as a C++ based
Dynamic Link Library (DLL) to access the API of
the haptic device, as well as to manage a haptic
rendering process at 1 kHz.
2.3 Haptic Model Module
The “Haptic Model” module enables to manage
reaction force calculation logic, a database of the
Component-basedAuthoringToolforHapticNavigation
487

haptic device status. The reaction force calculation
process is running at 1 kHz to calculate a reaction
force for an applied haptic component. The
calculated force is sent to the ”Haptic Device
Controller” module to display it via the connected
haptic device. This module is listed on the Built-in
components in Unity3D.
We categorized a common haptic interaction in
navigation into two abstract components such as
"Move", and "Caution". These abstract components
are defined as sub modules of the “Haptic Model”
module.
Each haptic component is associated with a
visual object which represents a visually defined
work area related to a haptic effect of the linked
haptic component.
2.3.1 “Move” Component
The “Move” component consists of four primitive
haptic components such as Magnet, LeadLine, Shot,
and Path.
Magnet Component: This component is
associated with a 3D sphere object which is a visual
object that represents a work area of the Magnet
Component. When one’s cursor, which is operated
by a connected haptic device, is within the work area,
for example, it will visually and haptically “Snap”
with an attractive force to the center of the work area.
The force of the Magnet Component:
was
determined according to equation 1.
.
.
(1)
where
is a spring constant,
is a
position of user’s cursor, is a position of the
Magnet Component, and r is a radius of the work
area.
LeadLine Component: A set of primitive 3D
visual objects such as cube, sphere, cylinder, and
capsule area associated with this component to
represent a work area of the LeadLine Component.
When a user’s cursor is within the work area, it will
visually and haptically move with a quick or an
abrupt motion to a user defined direction. The force
of the LeadLine Component:
is expressed
as equation 2.
・
(2)
Where
is a constant value which is related
to a speed of the applied motion within the LeadLine
Component area. is the user defined direction.
Shot Component: A set of primitive 3D visual
objects are associated with the Shot Component as a
trigger area. When a user’s cursor is within the
trigger area, it will visually and haptically move with
a quick motion to a user defined terminal position.
The terminal position could be repressed with a
position of a 3D sphere. The force of the Shot
Component: F
is expressed as in equation 3.
・
(3)
Where,
is a constant value which represents
the speed of the applied motion. is the position of
the terminal point.
Path Component: A set of primitive 3D visual
objects are associated with the Path Component as a
trigger area. This component is associated with a 3D
path graph which represents a 3D line as a work area.
This path is enabled to be edited by a user on the
Unity3D Editor. When a cursor is within the trigger
area, it will visually and haptically move on the 3D
path with a quick motion. The force of the Path
Component:
is expressed as in equation 4.
・
(4)
is a constant value which represents the speed
of the applied motion.
is a pointer object which
is jointed with a user’s cursor position:
. The
pointer object automatically moves on the 3D path.
2.3.2 “Caution” Component
The “Caution” component consists of two primitive
haptic components such as Vibration, and Viscosity.
Vibration Component:
This component is
associated with a set of primitive 3D objects that
represents a work area of the Vibration Component.
When one’s cursor is within the work area, it will
visually and haptically vibrate. The force of the
Vibration Component:
is expressed as in
equation 5.
・(5)
is an unit direction vector which represents
a direction of the applied vibration haptic effect. The
direction of the unit vector is randomly generated
between 0 and 1 for each direction component: x, y,
and z, and then it is normalized.
is a
constant value which gives a magnitude of the
applied vibration.
Viscosity Component
: A set of primitive 3D
objects that represents a work area of the Viscosity
Component. When a cursor moves within the work
area, it will visually and haptically move with a
viscous motion. The force of the Viscosity
Component:
is expressed as in equation 6.
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
488

・
(6)
is a constant value which represents a
coefficient of viscosity.
is a 3D pointer which is
connected to the cursor with a virtual fixed joint.
The fixed joint restricts the movement of the
to
be dependent upon the cursor position. The spring
constant of the fixed joint is set at a high stiffness,
e.g., 1000 N/m.
3 IMPLEMENTED RESULTS
A brief outline of the practical use of the proposed
system is provided in this section. The development
phase consists of three phases: (1) Definition of the
work area which is visually represented, (2)
applying a haptic component to the defined work
area, and (3) preview of the designed haptic effect.
Figure 3: The process of the definition of the work/trigger
area.
3.1 Definition of the Work Area
The author is required to define a work area or a
trigger area for a haptic component. A set of
primitive 3D objects built in the Unity3D Editor are
used as the work/trigger area. In this example, a
sphere is used as these areas.
The sphere object can be found on the “Create
Other” menu under the “GameObject” menu which
is on the main menu of the Unity3D Editor. When
selected, a sphere appears on the game scene on the
Unity3D Editor, allowing users to view, rotate, scale,
and translate as well as to edit the parameter of the
sphere (Figure 3).
If a haptic component which will be applied on
the sphere is: a Magnet, a Leadline, a Vibration, or a
Viscosity Component, the sphere will work as a
work area. If it is a Shot, or a Path Component, the
sphere will work as a trigger area.
3.2 Applying a Haptic Component
For the second phase, a haptic component can be
applied to the defined work/trigger area. A set of
haptic components can be found on the “Haptic”
menu under the “Component” menu which is on the
main menu of the Unity3D Editor. In this section,
three examples are provided using Magnet, Path,
and Viscosity Component.
Figure 4: The applied Magnet Component on the sphere
type work area.
Magnet Component: The defined sphere works as a
work area. When the work area is selected by a
mouse click, the Magnet Component can be applied
to select the “Magnet” in the “Move” menu under
the “Haptic” menu (Figure 4). The applied haptic
effect works while a user’s cursor is within the work
area.
Path Component: The defined sphere works as a
trigger area. When the work area is selected by
mouse click, the Path Component can be applied to
select the “Path” in the “Move” menu (Figure 5).
When the Path Component is applied on the
work area, a 3D path graph will appear on the trigger
area. The 3D path graph can be edited on the game
scene. Furthermore, an additional path can be added
to change a number of paths which is on the
inspector menu. An applied haptic effect works
when a user’s cursor is within the trigger area.
Viscosity Component: The defined sphere works
as a work area. When the work area is selected by
mouse click, the Viscosity Component can be
applied to select the “Viscosity” in the “Caution”
menu. The applied haptic effect works while a user’s
cursor is within the work area.
Component-basedAuthoringToolforHapticNavigation
489
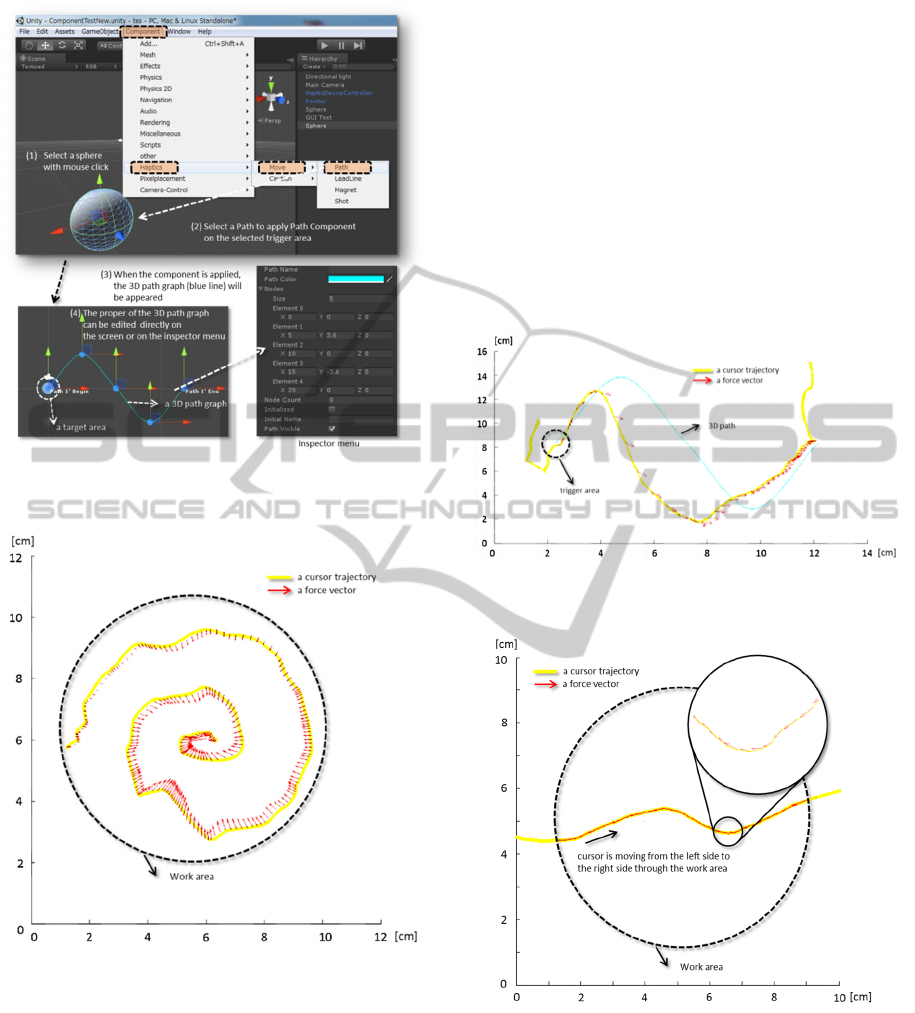
Figure 5: The applied Path Component on the sphere type
trigger area.
Figure 6: The cursor’s trajectory with the applied force
vector of the Magnet Component.
3.3 Results of the Applied Haptic
Effect
For the third phase, the applied haptic effect can be
previewed by pressing the play button on the
Unity3D Editor. In this section, the results of the
preview are shown concerning the three examples
described in section 3.2.
Magnet Component: Figure 6 shows the
previewed result of the applied haptic effect using
the Magnet Component. The applied force vector
with the cursor’s trajectory is shown in Figure 7.
The result shows that when the user’s cursor is
within the work area, it visually and haptically
moves with an attractive force to the center of the
work area.
Path Component: Figure 7 shows the previewed
result of the applied haptic effect using the Path
Component. The applied force vector with the
cursor’s trajectory is also shown in the figure. The
result shows that when a cursor is within the trigger
area, it visually and haptically moves on the 3D path
with a quick motion.
Figure 7: The cursor’s trajectory with the applied force
vector of the Path Component.
Figure 8. The cursor’s trajectory with the applied force
vector of the Viscosity Component.
Viscosity Component: Figure 8 shows the previewed
result of the applied haptic effect using the Viscosity
Component. The applied force vector with the
cursor’s trajectory is also shown in the figure. The
result shows that when a cursor moves within the
work area, it visually and haptically moves with a
viscous motion.
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
490

4 CONCLUSION
In this paper, we proposed a component-based
authoring tool for haptic navigation using Unity3D
game engine as a main development platform. The
proposed system was extended based on our
previous work. The integrated haptic components
enable a user to quickly develop a haptic application
for navigation with no programming required.
We categorized a common haptic interaction in
navigation into two abstract components such as
"Move", and "Caution". The “Move” component
consists of four primitive haptic components such as
Magnet, LeadLine, Shot, and Path. The ”Caution”
components consists of two primitive haptic
components such as Vibration, and Viscosity.
The results of the preview of the applied haptic
effect: Magnet, Path, and Viscosity Component
show how easily our framework can be used to built
a haptic navigation environment as well as how the
applied navigation works to see the cursor’s
trajectory with the applied force vector while the
applied haptic effect is working.
As future work, we plan to extend the haptic
component to support a variety of haptic interaction.
REFERENCES
Blender Foundation. Blender. (1995).
http://www.blender.org/
Bivall, P., Ainsworth, S., & Tibell, L. A. (2011). Do haptic
representations help complex molecular
learning?. Science Education, 95(4), 700-719.
Broeren, J., Rydmark, M., & Sunnerhagen, K. S. (2004).
Virtual reality and haptics as a training device for
movement rehabilitation after stroke: a single-case
study. Archives of physical medicine and
rehabilitation, 85(8), 1247-1250.
Cha, J., Seo, Y., Kim, Y., & Ryu, J. (2007, March). An
authoring/editing framework for haptic broadcasting:
passive haptic interactions using MPEG-4 BIFS.
In Proceedings of the Second Joint EuroHaptics
Conference and Symposium on Haptic Interfaces for
Virtual Environment and Teleoperator Systems (pp.
274-279). IEEE Computer Society.
Eid, M., Orozco, M., & El Saddik, A. (2007). A guided
tour in haptic audio visual environments and
applications. International Journal of Advanced Media
and Communication, 1(3), 265-297.
Eid, M., Andrews, S., Alamri, A., & El Saddik, A. (2008).
HAMLAT: A HAML-based authoring tool for haptic
application development. In Haptics: Perception,
Devices and Scenarios (pp. 857-866). Springer Berlin
Heidelberg.
El-Far, N. R., Shen, X., & Georganas, N. D. (2004,
October). Applying Unison, a generic framework for
hapto-visual application developments, to an e-
commerce application. In Haptic, Audio and Visual
Environments and Their Applications, 2004. HAVE
2004. Proceedings. The 3rd IEEE International
Workshop on (pp. 93-98). IEEE.
Essert-Villard, C., & Capobianco, A. (2009, November).
Hardborders: a new haptic approach for selection tasks
in 3d menus. In Proceedings of the 16th ACM
Symposium on Virtual Reality Software and
Technology (pp. 243-244). ACM.
Feygin, D., Keehner, M., & Tendick, F. (2002). Haptic
guidance: Experimental evaluation of a haptic training
method for a perceptual motor skill. In Haptic
Interfaces for Virtual Environment and Teleoperator
Systems, 2002. HAPTICS 2002. Proceedings. 10th
Symposium on (pp. 40-47). IEEE.
Fyans, A. C., & McAllister, G. (2008). Creating games
with feeling. In Proc. Int. Conf. on Computer Games:
Artificial Intelligence and Mobile Systems, Las Vegas,
NV (pp. 94-98).
Novint Technologies. Novint Falcon. (2006). from
http://www.novint.com/index.php/novintfalcon.
Oakley, I., Brewster, S., & Gray, P. (2001, March).
Solving multi-target haptic problems in menu
interaction. In CHI'01 extended abstracts on Human
factors in computing systems (pp. 357-358), ACM.
Pascale, de M and Prattichizzo, D., (2007). The Haptic
Library: A Component Based Architecture for
Uniform Access to Haptic Devices. IEEE Robotics &
Automation Magazine, 14 (4), 64-75.
Unity Technologies. Unity3D: Game development tool.
(2005). from http://unity3d.com/
Yamaguchi, T., Richard, P., Oshima, K., & Kato, K.
(2014). Component-Based Haptic Application
Creation Framework for Unity3D. In Proceedings of
IWAIT 2014.
Yamaguchi, T., Johnson, S., Kim, H. N., Li, Y., Nam, C.
S., & Smith-Jackson, T. L. (2009). Haptic science
learning system for students with visual impairments:
A preliminary study. In Universal Access in Human-
Computer Interaction. Applications and Services (pp.
157-166). Springer Berlin Heidelberg.
Component-basedAuthoringToolforHapticNavigation
491
