
Edge based Foreground Background Estimation with Interior/Exterior
Classification
Gianni Allebosch, David Van Hamme, Francis Deboeverie, Peter Veelaert and Wilfried Philips
Image Processing and Interpretation Group (IPI), Department of Telecommunications and Information Processing
(TELIN), Ghent University - iMinds, St-Pietersnieuwstraat 41, 9000, Ghent, Belgium
Keywords:
Foreground Background, Edge Motion, Local Ternary Patterns, Interior.
Abstract:
Foreground background estimation is an essential task in many video analysis applications. Considerable
improvements are still possible, especially concerning light condition invariance. In this paper, we propose a
novel algorithm which attends to this requirement. We use modified Local Ternary Pattern (LTP) descriptors
to find likely strong and stable “foreground gradient” locations. The proposed algorithm then classifies pixels
as interior or exterior, using a shortest path algorithm, which proves to be robust against contour gaps.
1 INTRODUCTION
Over the years, many foreground background seg-
mentation methods have been proposed. Several of
them are variations on the classical Gaussian Mixture
Model (GMM) (Stauffer and Grimson, 1999) con-
cept. It is assumed that the frequency of an appear-
ance level (intensity, RGB . . . ) occurring at a cer-
tain pixel can be modelled statistically as a mixture
of Gaussian distributions. The more recent ViBe al-
gorithm (Barnich and Droogenbroeck, 2011) and its
successor ViBe+ (Droogenbroeck and Paquot, 2012)
are built on similar principles as the GMM, but store
the distributions as a collection of samples rather than
by the model parameters.
Pixel appearances can change drastically un-
der changing lighting conditions (Cristani et al.,
2010). The previously described methods handle
light changes poorly. Edge based approaches on
the other hand are able to produce stable results un-
der illumination changes (Gruenwedel et al., 2011).
However, moving objects are generally contiguous,
so additional contour filling strategies are required.
Foreground edges are prone to gaps, which classical
boundary filling techniques (floodfill, scanline fill . . . )
are unable to cope with. The robust filling of contours
with gaps is still a challenge.
Illumination invariant descriptors provide an al-
ternative solution. In the method of Heikkil
¨
a and
Pietik
¨
ainen (Heikkila and Pietikainen, 2006), Local
Binary Patterns (LBPs) are used to construct his-
tograms over a larger region. Different objects usually
have different textures, so they give rise to differing
LBP histograms. However, objects can have regions
with textures similar to the background, which results
in incomplete foreground masks. A recent method,
coined SuBSENSE (St-Charles et al., 2014) attempts
to overcome these issues by using the more advanced
Local Binary Similarity Patterns (Bilodeau et al.,
2013), additional color information, and a framework
for automatic local parameter tuning. Even though
these steps significantly improve the overall perfor-
mance, there are still considerable improvements pos-
sible for difficult illumination conditions. For in-
stance, the F-measure of SuBSENSE on the Night
Video sequences on the ChangeDetection.NET 2014
dataset is limited to only 53.9%, while still being the
highest ranking method to date (Wang et al., 2014).
In this paper, we describe a foreground back-
ground segmentation algorithm which attends to the
shortcomings described above. We combine the ben-
efits of edge based approaches with the robustness of
illumination invariant descriptors. Firstly, we assume
that each local image gradient value above noise level
is an indication for the possible presence of an edge.
Combining these features over a larger area increases
the robustness. As we will show in Section 2, this
information can be extracted from the Local Ternary
Pattern (LTP (Tan and Triggs, 2010)) descriptor.
Secondly, even with increased robustness, gaps
can still occur in the contour. We propose a fast
(O(n)), graph search based method that measures
how difficult it is to reach points from the corners of
the image, where the edge pixels serve as obstacles.
369
Allebosch G., Van Hamme D., Deboeverie F., Veelaert P. and Philips W..
Edge based Foreground Background Estimation with Interior/Exterior Classification.
DOI: 10.5220/0005358003690376
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 369-376
ISBN: 978-989-758-091-8
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
Closed contours are considered impossible to enter. A
contour with gaps can be entered, but with increasing
difficulty when more edge pixels block the way in.
Based on this metric, we introduce a novel, shortest
path based interior filling mechanism. We will show
that these techniques perform especially well under
difficult lighting conditions compared to state-of-the-
art techniques.
2 LTP BASED GRADIENT
DESCRIPTION
Using LTPs, we developed a gradient descriptor, tai-
lored specifically to the needs of robust foreground
detection.
2.1 Alternative Local Ternary Patterns
Description
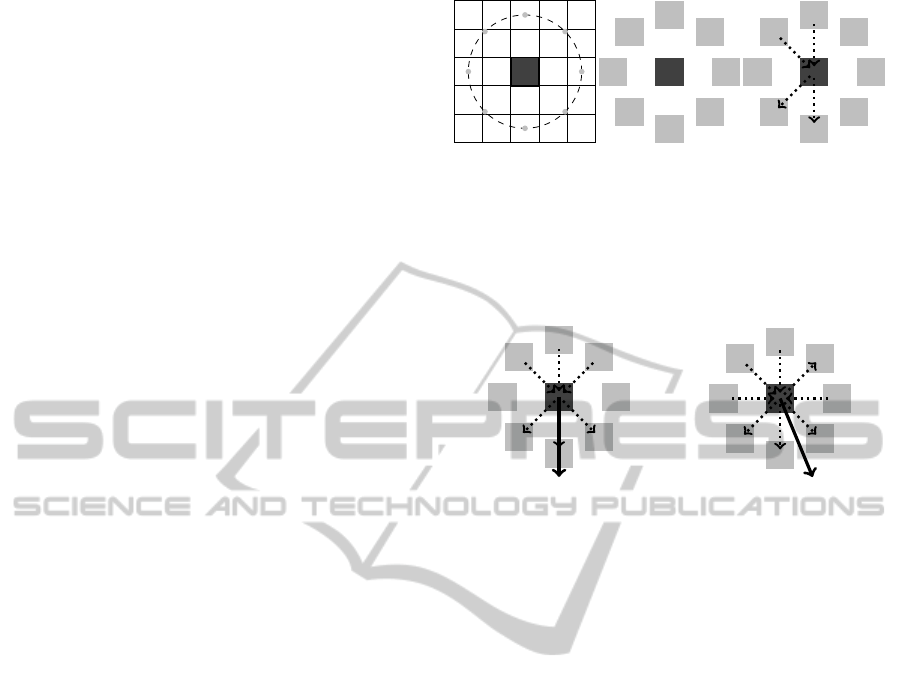
Local Ternary Patterns (LTPs) are classes of point
descriptors which represent the local variations of
appearance levels in a ternary description (Tan and
Triggs, 2010). Let us denote a gray scale image I.
For each pixel z, a number of surrounding pixels are
selected, often symmetrically from a circle around z.
For each selected surrounding pixel p
i
, the gray level
difference d
s
with the center pixel z is coded as
d
s
[z, i] =
1 if I
s
[z, i] −I[z] > T
−1 if I
s
[z, i] −I[z] < −T
0 otherwise
(1)
with T a given, typically low threshold and I
s
[z, i] the
gray scale value of p
i
. d
s
[z, i] represents whether the
selected surrounding pixel p
i
has a significantly dif-
ferent intensity value from z. When d
s
[z, i] = 0, the
thresholded difference is considered to be below noise
level. An example is given in Figure 1.
We observe that every d
s
[z, i] can also be thought
of as a binary gradient g
b
[z, i], either with unit or zero
length, and with a direction either from z towards p
i
,
or from p
i
towards z (Figure 1c). Formally,
g
b
[z, i] = d
s
[z, i]e
i
, (2)
where e
i
is the unit vector pointing from z towards p
i
.
If there is an edge at the center pixel z, we ex-
pect the individual binary gradients in the LTP de-
scriptor to comply with each other. As a measure for
this “compliance”, we use the summation g[z] of these
binary gradients.
g[z] =
N−1
∑
i=0
g
b
[z, i] . (3)
54 57 58 55 51
51 53 55 51 52
48
49
50 51 50
43
44
49
50 51
39
41
46
49
52
50
(a)
50 5048
46
58
50
42
5254
(b)
00
-1
1
0
-1
0
1
(c)
Figure 1: An example of a Local Ternary Pattern with 8
neighborhood points: (a) Intensity levels in a certain im-
age region, with circular neighborhood points denoted. (b)
Interpolated neighborhood intensity levels. (c) LTP repre-
sentation (T = 3), with our binary gradients representation
superimposed.
00
-1
1
-1-1
11
(a)
-1-1
-1
1
1-1
11
(b)
Figure 2: Visualization of the summed binary gradient
(black arrow, not to scale). The individual binary gradi-
ents are shown as dotted arrows. (a) Example with obvious
gradient direction (b) Example with less obvious gradient
direction.
This vector’s direction can be regarded as the most
likely gradient direction. Its length is a measure for
the confidence of the calculated gradient direction.
Note that g[z] should thus be considered a gradient
descriptor as opposed to the original LTP texture de-
scriptor (Tan and Triggs, 2010). Examples are given
in Figure 2.
2.2 Orientation Dependent Edge
Smoothing
Edges in real images tend to continue in the same
direction (perpendicular to the local gradient) over a
certain length. To further improve the results for our
LTP based gradients, we apply an adaptive smoothing
strategy. Assume the gradients at pixel location z are
stored as a 2D vector, g[z] = (x, y). The gradients can
thus be represented by two images, which we both fil-
ter with rotated, anisotropic 2D Gaussian kernels. The
Gaussians have significantly different standard devia-
tions along both dimensions, so smoothing is mainly
performed along the chosen orientation. The orienta-
tion of the kernels is adjusted locally, depending on
the summed gradient direction (Section 2.1).
Our global strategy of thresholding the individual
intensity differences first and then combining the evi-
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
370

(a) (b)
Figure 3: (a) Input image. (b) Gradient confidence levels,
where darker means more likely. Note that all clear edges
in the image are represented by similarly strong gradient
confidences.
dence over a larger area, is what makes our descriptor
robust in different illumination conditions. In our ap-
proach, all significant intensity differences are treated
as being equally important. All that matters is that
the evidence is supported in the surrounding region.
This stabilizes the gradient confidence levels and also
diminishes the possibility that single (noisy) pixels
sharply disturb the descriptor. A result of the gradi-
ent calculation and successive smoothing step of our
algorithm is shown in Figure 3.
3 MOVING CONTOURS
In this section, we discuss the construction of our LTP
based temporal model. Our model is closely related to
the framework developed by Heikkil
¨
a and Pietik
¨
ainen
(Heikkila and Pietikainen, 2006), but our contribution
offers a more advanced updating mechanism that is
able to handle a wider range of scenarios. The ba-
sic model is explained briefly in Section 3.1, while
the novel updating mechanism is explained in Section
3.2.
3.1 Temporal Model
At each pixel location z, a fixed number M of our
adaptively smoothed gradient vectors v
j
(1 ≤ j ≤
M) are stored. These vectors represent the tempo-
ral model for the chosen pixel. In each frame, the
new gradient vector is compared to each vector in the
temporal model at that location. Only the vector v
k
(1 ≤ k ≤ M) with the lowest squared difference from
the input gradient is updated. Let v[z, t] be the new
LTP based gradient from the input image at that lo-
cation at time index t. The best matching vector is
updated as follows:
v
k
[z,t] = α[z,t]v[z,t] + (1 −α[z, t])v
k
[z,t −1] (4)
with α[z, t] the learning rate, which will be discussed
in depth in Section 3.2.
Pixel locations where the gradient in the current
(a) (b)
Figure 4: (a) Our foreground gradients. (b) Foreground
edges from (Gruenwedel et al., 2011). Note that our method
trades a bit of localization accuracy for higher robustness
against gaps, due to the low LTP threshold and orientation
dependent smoothing.
image differs substantially from the most likely back-
ground vectors are considered to be part of foreground
gradient regions. Therefore, for each vector v
j
, a
weight factor w
j
is kept, which is a measure for the
likelihood that the vector represents the background.
w
j
is updated as follows:
w
j
[z,t] =
(
α[z,t] + (1 −α[z, t])w
j
[z,t −1] if j = k.
(1 −α[z, t])w
j
[z,t −1] otherwise
(5)
The temporal vectors are sorted according to their
weights. The most weighted vector always represents
background. Consecutive vectors are added to the
background vector set, until their cumulative weight
exceeds a chosen threshold T
w
. The input gradient
vectors are then compared to the vectors in the back-
ground set. If the lowest squared error exceeds an-
other threshold T
e
, this pixel is considered to be fore-
ground. Furthermore, if the lowest squared error with
all vectors in the temporal model exceeds T
e
, the tem-
poral vector with the lowest weight is replaced by the
current vector v[z,t]. Results are shown in Figure 4.
3.2 Adaptive Learning Rate
In the simplest cases, the background is entirely visi-
ble in the first frame, and remains unchanged through-
out the rest of the sequence. However, in many realis-
tic scenario’s, one cannot make this assumption. Ex-
amples include background object displacements or
deformations (e.g. waving trees) and (small) camera
displacements. Besides that, it is sometimes difficult
to capture an ‘empty frame’, where there is no fore-
ground to begin with.
One approach to overcome these issues, is to
slowly adapt the background model, using a learning
rate (Eq. 4 and Eq. 5). In many algorithms with
similar background models, this learning rate is kept
constant for all pixels and throughout the sequence,
and has to be tuned manually in advance for each
sequence individually (Stauffer and Grimson, 1999)
(Heikkila and Pietikainen, 2006). Some methods
EdgebasedForegroundBackgroundEstimationwithInterior/ExteriorClassification
371

adapt the maintenance mechanism at runtime if a
large illumination change is detected (Porikli and
Tuzel, 2003), but this is not necessary for our method.
A more advanced approach is to raise the learning
rate locally for rapidly changing (“blinky”) pixels
(St-Charles et al., 2014). However, this might create
issues for fast moving objects, or similarly on videos
captured at a low framerate.
Our framework is built on the following principles:
• A minimal amount of learning is necessary
throughout the sequence, in order to adapt to mi-
nor changes.
• The learning rate must be higher in the beginning
of the sequence. This ensures that foreground ob-
jects present in the first few frames get replaced
quickly by background vectors in the model once
they move.
• The learning rate should increase if the back-
ground model becomes unreliable.
So, the learning rate should at least be ≥ α
c
, a very
small constant. Furthermore, we impose that part
of the learning rate α
e
decreases exponentially over
time:
α
e
[t] =
1
M
e
−τt
, (6)
where t is the number of frames since the background
model was initialized and τ is a user settable param-
eter, which determines the rate at which the func-
tion decreases. The multiplication by
1
M
avoids that
the weights of the current model drop too drastically,
once all temporal vectors have been initialized.
Finally, the background model can become unre-
liable if there are large changes in the image, not due
to foreground objects. We denote a background un-
reliability rate α
u
, which is increased in two different
scenario’s:
1. The background model should be corrected glob-
ally, e.g. when there is a large camera displace-
ment.
2. The background model should be corrected lo-
cally, e.g. when a gust of wind deforms a tree.
The first scenario can be identified fairly easily. If
there is a large disagreement between the current
frame and the model (i.e. there are too many fore-
ground pixels), the camera position has likely shifted
or a significant change has occurred in the back-
ground. The model should adapt to these changes
quickly. For this purpose, we impose a ‘global unre-
liability’ term U
G
, that is sigmoid-shaped (Figure 5):
U
G
[t] =
0.5
M
1 + erf
R
f
[t] −µ
σ
(7)
with erf (x) =
2
√
π
Z
x
0
e
−y
2
dy . (8)
R
f
U
G
Figure 5: U
G
as a function of the foreground (gradient) pixel
percentage R
f
for different values of σ. The solid line rep-
resents the case where σ = 0, and behaves like a regular
(hard) threshold or step function.
(a) (b)
Figure 6: (a) Input frame from the ChangeDetection.NET
2014 dataset with dynamic background below a busy street
(Wang et al., 2014). (b) Visualization of U
G
for the entire
image, lighter means more unreliable. Note that the region
corresponding to the water is correctly classified as more
unreliable background, while the busy street above has a
much smaller unreliability term.
erf is the error function, R
f
[t] is the percentage of
foreground pixels in frame t and σ and µ are user set-
table parameters. It behaves like a ’soft threshold’ at
µ. σ determines how steep the function is. If σ = 0,
U
G
behaves like a regular threshold, much like in the
method of Wang and Suter (Wang and Suter, 2005).
The minimum of U
G
[t] is 0 and the maximum is again
1
M
. In this way, the model should be able to handle
M −1 different camera positions (one remaining for
foreground gradient pixels).
The second scenario is less trivial to identify. Sim-
ply looking at the amount of foreground pixels is not
recommended, since dynamic background can be eas-
ily confused with regions that simply contain a lot of
foreground (e.g. a busy street). However, dynamic
background will often produce many isolated pixels
(Figure 6). In our algorithm, this phenomenon is ex-
ploited by building a local isolated pixel rate R
i
over
time:
R
i
[z,t] = α
i
[t]R
i,curr
[z,t] + (1 −α
i
[t])R
i
[z,t −1] ,
(9)
where α
i
[t] = C
i
+ (1 −C
i
)Mα
e
[t] (10)
with C
i
a small constant. R
i,curr
[z,t] = 1 if z is the only
foreground gradient pixel in his 8-connected neigh-
borhood, otherwise R
i,curr
[z,t] = 0. Note that α
i
is
higher in the beginning of the sequence, since the
accumulated evidence of dynamic background gets
more reliable over time. The ‘local unreliability’ U
L
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
372

at z in frame t is now
U
L
[z,t] = R
i
[z,t] ∗K
G
, (11)
where K
G
is an isotropic Gaussian kernel, used to
combine evidence of unreliability in the neighbor-
hood of z.
The background unreliability rate α
u
[z,t] is now
defined as the maximum of the global and local unre-
liability:
α
u
[z,t] = max[U
G
[t],U
L
[z,t]] . (12)
The total learning rate α[z, t], taking into account all
of the considerations described above, is
α[z,t] = min
1
M
, α
c
+ α
e
[t] + α
u
[z,t]
. (13)
4 SHORTEST PATH BASED
INTERIOR FILLING
In the previous sections, we described our strategy to
create a foreground image, consisting of significant
gradient differences. Here, we describe how interior
points can be filled.
4.1 Interior Points
To determine the entire moving object, we must fill its
moving contour. Topologically, a point can be classi-
fied as interior if it is completely enclosed by contour
points. If the foreground gradients would only consist
of closed contours, classical contour filling strategies
would be sufficient. However, even with the robust-
ness measures described in previous sections, gaps
can still occur.
One possible approach to overcome this problem
is to group foreground edge pixels, based on connec-
tivity and distance, into curve segments. The convex
hull of these segments can then be taken as an ap-
proximation of the filled silhouette. This does pro-
duce foreground regions which are too large, if the
objects themselves are not convex. A more restrictive
approach is to use the orthogonal hull (Ottmann et al.,
1984). However, even the orthogonal hull is often still
too large. The algorithm described in this paper pro-
duces a silhouette S(P) that satisfies
C(P) ⊆ S(P) ⊆ H
o
(P) ⊆ H
c
(P) , (14)
where the set C(P) is obtained by filling the closed
contours in the pixel set P (and leaving the other edges
intact). H
o
(P) and H
c
(P) are the orthogonal hull and
convex hull of P respectively.
The basic idea is as follows: The probability of a
point being interior, is proportional to how difficult
(a) (b)
Figure 7: Examples of the path distance calculation from all
4 image corners to a chosen pixel. Black solid lines repre-
sent strong edges, dotted lines the individual paths. In (a),
the path from 1 image corner is larger than the Manhattan
distance. In (b), the paths from 2 image corners are longer.
it is to reach that point from the outside, where the
strong gradient points act as obstacles. If this ob-
ject’s contour is closed, every possible “path” to one
of its interior points would be blocked by foreground
gradient pixels. Alternatively, if there is a single gap
in the contour, it would be possible to reach the in-
terior points, but a path to it would likely be longer
than in a scenario without edge pixels. An example is
given in Figure 7.
We point out that the foreground gradients consist
of contours of foreground objects (external edges),
but might also contain other, internal foreground
edges. However, since these edges should be part of
the entire foreground silhouette as well, this reasoning
still holds.
4.2 Path Length Comparison
We consider the foreground gradient image as a 4-
connected input graph. Starting from a fully con-
nected graph, vertices coinciding with foreground
pixels and their links are removed. The path length
D
P
from the four image corners c
i
(1 ≤i ≤4) to each
of the image pixels z is found by using Breadth First
Search (BFS) in the graph. We define the “excess”
distance D
E
as the difference between the actual path
length and the minimal length (if there would be no
edge pixels). In particular, we have
D
E
[z, i] = D
P
[z, i] −D
M
[z, i] , (15)
where D
M
[z, i] is the Manhattan distance from c
i
to
z, ignoring edges. If z cannot be reached, we set
D
E
[z, i] = ∞. It is easy to show that, if the foreground
object is orthogonally convex, it is possible to reach
any point on the outside of the contour from at least 3
image corners with minimal distance (if there is a free
path along the image borders). The distance from the
4th corner often exceeds this minimum substantially.
Keeping in mind the subset relations in Eq. 14, we
exclude the corner c
l
with the largest excess distance
from further analysis in each pixel (Figure 7). Sum-
ming over the 3 remaining D
E
s, results in the total
EdgebasedForegroundBackgroundEstimationwithInterior/ExteriorClassification
373

(a) (b) (c) (d) (e)
Figure 8: Performance of our proposed method on a few hand picked frames from the ChangeDetection.NET 2014 dataset
(Wang et al., 2014). (a) Baseline. (b) Thermal. (c) Night videos. (d) Dynamic background. (e) Bad Weather.
excess distance D
E,tot
for that pixel position z:
D
E,tot
[z] =
∑
i6=l
D
E
[z, i] . (16)
If a pixel lies outside of the orthogonal hull of all edge
pixels, the excess distance is always zero. If a pixel
cannot be reached, this distance is infinite. We now
classify the interior pixels as foreground by imposing
a threshold T
d
≥0. The binary foreground image F is
constructed as follows:
F[z] =
(
1 if D
E,tot
[z] > T
d
0 otherwise
(17)
As a final remark, we observe that the resulting
foreground blobs are often larger than strictly neces-
sary. This is because the contours themselves were
not thinned earlier, to avoid the possible creation of
gaps. So, all blobs are thinned using morphological
erosion as a final step.
If there is one moving object, and the filled sil-
houette is constructed as described above, Eq. 14 is
always satisfied. Higher thresholds “cut” out more
pixels from the silhouette, but never more than con-
tour filling, and never less than the orthogonal hull. If
there are multiple objects moving in the scene, Eq. 14
is satisfied for the individual objects as long as their
rectangular bounding boxes do not overlap.
The time complexity of BFS in a graph can be ex-
pressed as O(|V |+ |E|), with |V | the number of ver-
tices and |E| the number of links (edges) (Cormen
et al., 2001). So, the time complexity of this filling
step can be written as O(n) with n the number of pix-
els in the input image.
5 RESULTS
We compared our algorithm to the state-of-the-
art, through the ChangeDetection.NET 2014 dataset
(Wang et al., 2014), which currently ranks 16 re-
cent (e.g. SuBSENSE (St-Charles et al., 2014)) or
Table 1: Parameters used in the experiments.
Parameter Value
T 3 (intensity range: [0, 255])
T
w
85 (% of total weight)
T
e
12 (% of maximum gradient vector length)
M 5
α
c
0.0005
τ 0.04
µ 0.2
σ 0.05
C
i
0.05
T
d
3
classical (e.g. GMM (Stauffer and Grimson, 1999)
(Zivkovic, 2004)) methods. This dataset contains a
total of 53 videos, spread across 11 categories. For all
videos, we used the ground truth images and scripts
provided by the owners of the website to calculate a
total of 7 different measures for each video and cat-
egory, as well as the overall performance. Note that
the same parameter set has to be used for all videos
in the dataset, such that optimizing for one particular
category is discouraged.
As a preprocessing step, all input images were
smoothed with a 3 by 3 Gaussian kernel. Postprocess-
ing was done with a 5 by 5 median filter on the binary
foreground images. The parameters were tuned man-
ually, and their values can be found in Table 1. The
proposed algorithm was developed using C++ code.
It runs at 29 f ps for 320 by 240 pixel videos on a
desktop with an Intel
R
Xeon
R
E5 Quad Core pro-
cessor. By way of comparison, the SuBSENSE algo-
rithm runs at approximately 19 f ps on the same hard-
ware configuration, using the C++ libraries provided
by the authors (St-Charles et al., 2014).
Some visible results are shown in Figure 8. The
calculated measures are given in Table 2. Since the
video sequences differ strongly between the cate-
gories (e.g. many or few foreground objects, overall
degree of difficulty . . . ), these measures show con-
siderable variance. The overall results are compared
with those of other methods in Table 3.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
374
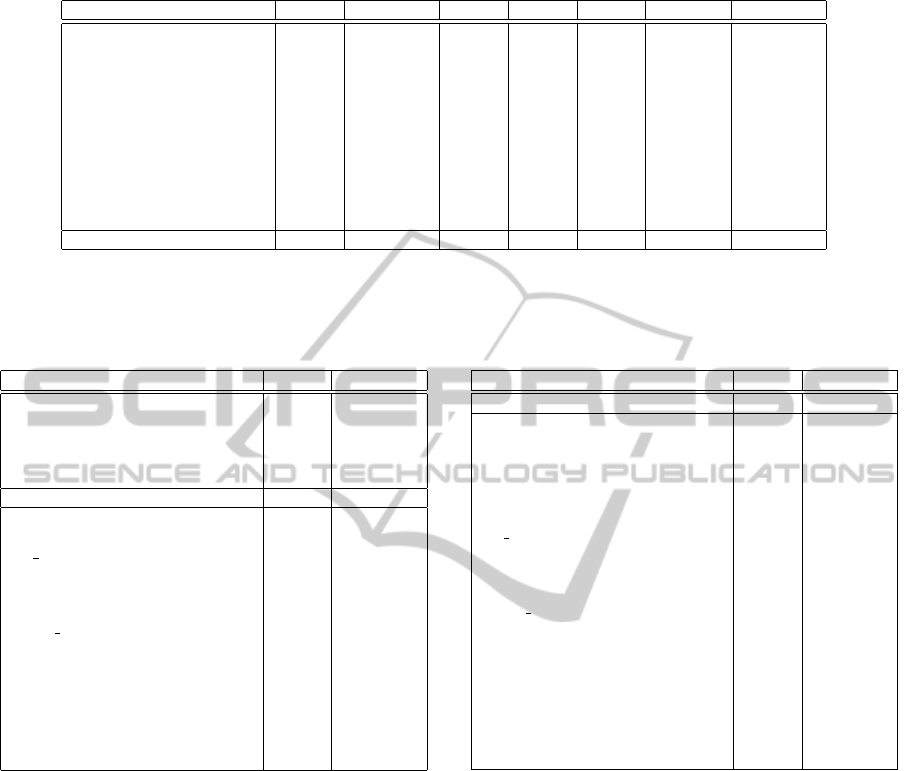
Table 2: Results on the ChangeDetection.NET 2014 dataset using all 7 measures (Wang et al., 2014).
Recall Specificity FPR FNR PBC Precision F-Measure
Night Videos : 0.6857 0.9907 0.0093 0.3142 1.6507 0.5973 0.6187
Baseline : 0.8313 0.9962 0.0038 0.1687 1.1425 0.8442 0.8310
Low Framerate : 0.6575 0.9976 0.0024 0.3425 1.0957 0.7409 0.6450
Camera Jitter : 0.7716 0.9801 0.0199 0.2284 2.7949 0.6475 0.6933
Intermittent Object Motion : 0.4429 0.9909 0.0091 0.5571 5.2399 0.7478 0.4755
Dynamic Background : 0.5809 0.9966 0.0034 0.4191 1.0171 0.6426 0.5196
Bad Weather : 0.7782 0.9970 0.0030 0.2218 0.6921 0.8534 0.8003
Shadows : 0.8195 0.9909 0.0091 0.1805 1.8368 0.7992 0.7999
Air Turbulence : 0.6711 0.9986 0.0014 0.3289 0.2865 0.6736 0.6391
Thermal : 0.6613 0.9946 0.0054 0.3387 3.8097 0.8452 0.7118
Pan-Tilt-Zoom : 0.5605 0.9705 0.0295 0.4395 3.2776 0.3030 0.3430
Overall : 0.6782 0.9912 0.0088 0.3218 2.0768 0.6995 0.6434
Table 3: Comparison of results on the ChangeDetec-
tion.NET 2014 dataset, Overall. These numbers and ref-
erences to the other methods can be found in (Wang et al.,
2014).
PBC F-Measure
FTSG (Flux Tensor, Split Gaussian
models)
1.3763 0.7283
SuBSENSE 1.8416 0.7331
CwisarDH 1.5273 0.6812
Spectral-360 2.2722 0.6732
Proposed Method 2.0768 0.6434
Bin Wang Apr 2014 2.9009 0.6577
KNN 3.3200 0.5937
SC SOBS 5.1498 0.5961
RMoG (Region-based Mixture of
Gaussians)
2.9638 0.5735
KDE - ElGammal 5.6262 0.5688
SOBS CF 6.0709 0.5883
Mahalanobis distance 3.4750 0.2267
GMM, Stauffer and Grimson 3.7667 0.5707
CP3-online 3.4318 0.5805
GMM, Zivkovic 3.9953 0.5566
Multiscale Spatio-Temporal Back-
ground Model
5.5456 0.5141
Euclidean distance 6.5423 0.5161
The proposed method ranks among the better per-
forming methods, with a fourth place on the average
PBC measure (Percentage of Bad Classifications) and
a sixth place on the F-Measure. The true potential of
our algorithm shows when looking at the results for
the Night Videos (Table 4). Both the F-Measure and
PBC show a vast improvement on the State-of-the-
Art. The LTPs, used as edge descriptors, allow the
system to detect even very small gradient changes ac-
curately, while the filling method is able to deal with
gaps in the contours.
We also note that our method only incorporates
gray scale information, which currently limits its per-
formance in some categories. The addition of color
information through future work, could allow this
method to rank higher in the other categories as well.
Furthermore, in order to be able to better handle cam-
era displacements, the proposed method could benefit
Table 4: Comparison of results on the ChangeDetec-
tion.NET 2014 dataset, Night Videos. These numbers and
references to the other methods can be found in (Wang et al.,
2014).
PBC F-Measure
Proposed Method 1.6507 0.6187
SuBSENSE 3.7145 0.5390
FTSG (Flux Tensor, Split Gaussian
models)
4.0052 0.5130
Spectral-360 4.4642 0.4832
Mahalanobis distance 3.7362 0.1374
CwisarDH 3.9853 0.3735
SC SOBS 6.1567 0.4503
RMoG (Region-based Mixture of
Gaussians)
5.1606 0.4265
KNN 4.9813 0.4200
SOBS CF 6.5308 0.4482
KDE - ElGammal 5.2735 0.4365
GMM, Zivkovic 4.7227 0.3960
GMM, Stauffer and Grimson 4.9179 0.4097
Multiscale Spatio-Temporal Back-
ground Model
5.8859 0.4164
Euclidean distance 5.5378 0.3859
CP3-online 7.6963 0.3919
Bin Wang Apr 2014 7.8383 0.3802
from the addition of optical flow or geometric image
transformation based techniques.
6 CONCLUSION
In this paper, we presented a new foreground back-
ground estimation technique. Gradient orientations
and confidence measures are calculated by using Lo-
cal Ternary Patterns. These gradients serve as input in
a background modelling framework. Finally, interior
points are added to the foreground image, based on
Breadth First Search in the foreground gradient im-
age. We have shown our method performs well in the
presence of difficult lighting conditions, e.g. at night,
compared to state-of-the-art methods.
EdgebasedForegroundBackgroundEstimationwithInterior/ExteriorClassification
375

ACKNOWLEDGEMENT
We would like to thank the creators of ChangeDetec-
tion.NET and all those responsible for providing the
means to evaluate our foreground background estima-
tion algorithm.
REFERENCES
Barnich, O. and Droogenbroeck, M. V. (2011). Vibe: A
universal background subtraction algorithm for video
sequences. IEEE Transactions on Image Processing,
20(6):1709–1724.
Bilodeau, G.-A., Jodoin, J.-P., and Saunier, N. (2013).
Change detection in feature space using local binary
similarity patterns. In CRV, pages 106–112. IEEE.
Cormen, T. H., Stein, C., Rivest, R. L., and Leiserson, C. E.
(2001). Introduction to Algorithms. McGraw-Hill
Higher Education, 2nd edition.
Cristani, M., Farenzena, M., Bloisi, D., and Murino,
V. (2010). Background subtraction for automated
multisensor surveillance: A comprehensive review.
EURASIP J. Adv. Sig. Proc., 2010.
Droogenbroeck, M. V. and Paquot, O. (2012). Background
subtraction: Experiments and improvements for vibe.
In CVPR Workshops, pages 32–37. IEEE.
Gruenwedel, S., Hese, P. V., and Philips, W. (2011). An
edge-based approach for robust foreground detection.
In ACIVS, pages 554–565.
Heikkila, M. and Pietikainen, M. (2006). A texture-based
method for modeling the background and detecting
moving objects. Pattern Analysis and Machine Intel-
ligence, IEEE Transactions on, 28(4):657–662.
Ottmann, T., Soisalon-Soininen, E., and Wood, D. (1984).
On the definition and computation of rectilinear con-
vex hulls. Information Sciences, 33(3):157 – 171.
Porikli, F. and Tuzel, O. (2003). Human Body Tracking by
Adaptive Background Models and Mean-Shift Analy-
sis. In IEEE International Workshop on Performance
Evaluation of Tracking and Surveillance.
St-Charles, P.-L., Bilodeau, G.-A., and Bergevin, R. (2014).
Flexible background subtraction with self-balanced
local sensitivity. In The IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR) Work-
shops.
Stauffer, C. and Grimson, W. E. L. (1999). Adaptive back-
ground mixture models for real-time tracking. In
CVPR, pages 2246–2252.
Tan, X. and Triggs, B. (2010). Enhanced local texture fea-
ture sets for face recognition under difficult lighting
conditions. IEEE Transactions on Image Processing,
19(6):1635–1650.
Wang, H. and Suter, D. (2005). A re-evaluation of mix-
ture of gaussian background modeling [video signal
processing applications]. In Acoustics, Speech, and
Signal Processing, 2005. Proceedings. (ICASSP ’05).
IEEE International Conference on, volume 2, pages
ii/1017–ii/1020 Vol. 2.
Wang, Y., Jodoin, P.-M., Porikli, F., Konrad, J., Benezeth,
Y., and Ishwar, P. (2014). Cdnet 2014: An expanded
change detection benchmark dataset. In The IEEE
Conference on Computer Vision and Pattern Recog-
nition (CVPR) Workshops.
Zivkovic, Z. (2004). Improved adaptive gaussian mixture
model for background subtraction. In ICPR (2), pages
28–31.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
376
