
Monitoring and Diagnosis of Faults in Tests of Rational Agents
based on Condition-action Rules
Francisca Raquel de V. Silveira, Gustavo Augusto L. de Campos and Mariela I. Cortés
State University of Ceará (UECE), Fortaleza, Ceará, Brazil
Keywords: Test Rational Agents, Diagnosis of Faults, Performance Evaluation, Test Monitoring.
Abstract: In theoretical references available to guide the design of agents, there are few testing techniques to validate
them. It is known that this validation depends on the selected test cases, which should generate information
that identifies the components of the agent tested that are causing unsatisfactory performance. In this paper,
we propose an approach that aims to contribute to the testing of these programs, incorporating the ProMon
agent in the testing process of rational agents. This agent monitors the testing and diagnosis of faults present
in a tested agent, identifying the subsystem information-processing agent that is causing the faults to the
designer. The first experiments are aimed at evaluating the approach by selecting test cases for simple
reactive agents with internal states and in partially observable environments.
1 INTRODUCTION
An Agent is an entity capable of perceiving their
environment by means of sensors and act in this
environment through actuators. The behavior of an
agent can be described by the function of the agent,
capable of mapping any sequence of specific
perceptions for an action. This function of the agent
is implemented concretely by an agent program,
which is executed in an adequate architecture.
Ideally, rational agents should act in order to reach
the best-expected outcome, evaluated according to a
performance measure (Russell and Norvig, 2013).
Since agent-based systems are increasingly
assuming several areas as patient care, battlefield
simulation, intrusion detection, games, etc.,
guarantee the correct operation of these systems
need to be given to users. This requires an
investigation of structures of software engineering,
including requirements engineering, architecture and
testing techniques to provide suitable development
processes and software verification (Nguyen et al.,
2012).
Although there are some efforts to support the
development of agent-based systems, little has been
done toward proposing methods and techniques to
test the performance of these systems (Nguyen et al.,
2009). The testing of rational agents involves the
adaptation and combination of already existing
techniques for software testing, in order to detect
different faults and to make the software agents
more reliable (Houhamdi, 2011a; Houhamdi,
2011b).
One of the possible reasons for the absence of
techniques for a testing agent is the difficulty to
applying the techniques that are able to guarantee
the reliability of these systems, due to the peculiar
properties and the specific nature of software agents,
which are designed to be distributed, autonomous
and decision-making, which cannot be reproduced,
which means it is not possible to guarantee that two
executions of the system lead to the same state, even
if the same inputs are used. As a consequence,
searching for a specific error can be difficult, since
you cannot reproduce it with each new execution
(Nguyen et al., 2012).
The testing of conventional software with
predictable inputs and outputs is a non-trivial
activity. Testing autonomous agents is a challenge,
since the execution of actions is based on decisions
of own agents, which may be different from the
user's perspective, since the same test input may
result in different executions. Due to the peculiar
properties and the specific nature of the software
agents, it is difficult to apply software testing
techniques capable to guarantee the confidence of
these systems (Nguyen et al., 2012; Silveira et al.,
2014).
585
de V. Silveira F., L. de Campos G. and Cortés M..
Monitoring and Diagnosis of Faults in Tests of Rational Agents based on Condition-action Rules.
DOI: 10.5220/0005364005850592
In Proceedings of the 17th International Conference on Enterprise Information Systems (ICEIS-2015), pages 585-592
ISBN: 978-989-758-096-3
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

This paper presents an approach that aims to
contribute to the process of rational agents testing.
The assumptions are that any test depends on the
selected test cases, which should generate
information to identify the components in the
structure of the artificial agent tested program that
are causing unsatisfactory performance. More
specifically, the proposed approach consists of
designing an agent that performs the monitoring
tests of the rational agent and the designer manages
relevant information about the performance and
agent faults during testing, while making
improvements in the agents of the program.
2 BACKGROUND
2.1 Rational Agents
The rational agents select its actions aiming at the
best possible outcome, or in the presence of
uncertainty, the best expected outcome as a
performance measure established to evaluate their
behavior. Designing rational agents in complex task
environments is a nontrivial task (Russell and
Norvig, 2013; Silveira et al., 2013).
The work of Artificial Intelligence is to design
the agent program, which implements the function
of the agent and will run on any architecture, ie, a
computing device with actuators and sensors.
Depending on the environment, the design of the
agent can be performed considering four basic types
of agent programs: (1) simple reactive agents (select
actions based on current perception, ignoring the
historical perceptions), (2) model-based reactive
agents (the agent keeps an internal state that depends
on the historical perceptions), (3) goal-based agents
(beyond the internal state, the agent keeps
information about the goals which describe desirable
situations); (4) utility-based agents (have a utility
function that maps a state in an associated degree of
happiness). In the environment where the agent does
not know the possible states and the effects of their
actions, the conception of a rational agent can
request an agent program with learning capabilities
(Russell and Norvig, 2013).
The four types of programs agents can be
subdivided into three main subsystems that process
information. The first, the perception subsystem,
maps a perception data (P) in an abstract
representation (State) useful to the agent, see: P →
State. The second, the update internal state
subsystem, maps representing the current perception
and information about the internal state (IS) held by
the agent on a new internal state, next: State x IS →
IS. Finally, the decision-making subsystem, maps
information about the internal state on a possible
action (A), action: IS → A (Wooldridge, 2002).
For the simple reactive agent program, the action
function selects actions based on the current
perception, mapped by the see function, and a set of
rules in the condition-action format. The next
function in model-based reactive agents keep a
description of the environmental state of the agent in
memory. The action function of the goal-based
agents programs selects its actions using the
information processed by the next function and
information on the goals that describe the desirable
situations in the environment. The action function of
utility-based agents uses a utility function to map
descriptions of the environmental state as an
associated happiness degree.
2.2 Testing Agents
Software testing is an activity that aims to evaluate
and improve the product quality by identifying
defects and problems. A successful test for detecting
defects is the one that makes the system operate
incorrectly and as a consequence, exposes the
defects (Sommerville, 2011; Pressman and Maxim,
2014).
Due to the peculiar properties of rational agents
(reactive properties, of memory, goal-based and
utility, and the learning) and its task environments,
there is a demand for new test techniques related to
the particular nature of agents. For the testing of
intelligent agents, it is necessary that the existing
software testing techniques are adapted and
combined at aiming to detect different faults,
making software agents more reliable. Most works
of literature consist of adaptations of the techniques
from conventional software testing. In the case of
the rational agents, we know that these adaptations
should seek to evaluate the rationality of actions and
plans executed by the agent in its task environment
(Houhamdi, 2011a; Houhamdi, 2011b).
Test input selection for intelligent agents
presents a problem due to the very fact that the
agents are intended to operate robustly under
conditions which developers did not consider and
would therefore be unlikely to test (Padgham et al.,
2013).
Some approaches focus on the production of the
test artifacts to support the development
methodologies for agent systems (Nguyen, 2008).
The assumption in most studies is that a good
evaluation of agent depends on the test case selected.
ICEIS2015-17thInternationalConferenceonEnterpriseInformationSystems
586

Good test cases should provide the generation of
information about the unsatisfactory performance of
the components in the structure of the agent and the
operation of these components in an integrated
manner (Houhamdi, 2011b).
3 RELATED WORKS
In agent-oriented software engineering several
approaches to testing agent programs have been
proposed. However, it is a challenging activity, and
the process for structured agent testing is still
expected (Houhamdi, 2011a; Houhamdi, 2011b).
In this section we consider the following criteria
in order to evaluate the perfomance of the existing
approaches to testing agent programs: (i) the notion
of rational agents, (ii) utilization of test cases
generated according to the agent goals, (iii) adoption
of a measure to evaluate the agent performance, (iv)
evaluation of the plans used by the agent to reach the
goals, and (v) monitoring the performance measure
of the tested agent.
A goal-oriented approach for the testing of
agents is presented in (Houhamdi, 2011b) that
complements the Tropos methodology (Mylopoulos
and Castro, 2000) and reinforces the mutual
relationship between the analysis and testing
objectives. It also defines a structured process for the
generation of tests for agents by providing a method
to derive test cases from the agent goals. This
strategy does not present: (i) the notion of rational
agents, (ii) a measure to performance evaluation of
the agent and (iii) any simulation to support the
monitoring of the agent behavior to perform the
actions involving the agent's goals.
An evolutionary approach for testing
autonomous agents is adopted by (Nguyen et al.,
2012). It proposes to apply a recruitment of the best
test cases for evolving agents. Each agent is given a
trial period in which the number of tests with
different difficulty levels are executed. This
approach is focused in the BDI architecture. Thus,
considering the evaluation criteria that is not treated:
(i) the notion of rational agents and (ii) a simulation
to monitoring the agent behavior performing an
action that involves goals.
An approach to the selection of test cases for
testing rational agents is proposed by Silveira et al.,
(2014). It proposes a utility-based agent that uses
aspects present in population-based metaheuristics to
find satisfactory sets of test cases, i.e., descriptions
of specific environments in which the histories
associated with the tested agent program in its
environment had lower performance. Analyzing the
presented criteria, this approach does not treat: (i) a
simulation to monitor the agent behavior performing
an action that involves goals.
4 PROPOSED APPROACH
This section presents the proposed approach and the
aspects involved in monitoring and diagnosis of
faults in the test of rational agents. The approach is
centered on the monitoring agent, ProMon.
4.1 Overall Approach
The proposed approach to the test of rational agents
is based on Silveira et al., (2014) that consider the
notion of rational agents in the use of test cases. The
test cases are generated according with (i) the goals
contained in the performance evaluation measure of
the tested agent, (ii) the simulation of the
interactions of the tested agent with its environment
(histories) and (iii) strategies of the utility-based
multi-objective local searches for finding test cases
and corresponding histories in which the agent is not
well evaluated. The proposed approach considers an
agent to monitor the testing and diagnosis of faults
in the tested agent, ProMon.
More specifically, the approach considers in
addition to Designer four program agents involved,
i.e., the agent program being tested Agent designed
by designer, the task environment program, Env, an
agent program for selecting test cases, Thestes and a
monitor agent program ProMon. Figure 1 illustrates
the interactions between these agents.
Figure 1: Overview of the approach.
The Designer is responsible for designing the
rational agent program Agent, the measure of
MonitoringandDiagnosisofFaultsinTestsofRationalAgentsbasedonCondition-actionRules
587

performance evaluation and setting other
information necessary for the agent Thestes to start
the process of testing the agent for Env. The
Thesthes agent consists of a solution for the
problems when selecting the test case that performs
local searches in the state of test utility-based cases.
This agent sends a set of efficient solutions
determined by multiobjective search strategy, i.e.,
describing test cases in which Agent has the most
inappropriate behavior, a set of corresponding
histories and their utility values, to the ProMon. The
ProMon agent receives this information and
identifies it for the Designer: the goals in the
evaluation measure that are not being adequately
met by the Agent, the episodes in the histories of
Agent in Env which are faults, i.e., that are “distant”
from the ideal, and what are the corresponding ideals
episodes.
4.2 ProMon Agent
This section outlines the main concepts in
monitoring the agent program ProMon, highlighted
in Figure 1. The section is divided into two
subsections. The first subsection briefly describes
aspects of rational agents that were considered by
ProMon agent in the composition of both events
(measures) as the diagnosis of faults. The second
subsection highlights the main function that the
agent uses to perform the diagnosis.
4.2.1 Notions of Rational Agents in ProMon
The conception of the ProMon agent believes that,
depending on the environment, the design of rational
agent can consider four basic types of agent
programs, i.e.: simple reactive, model-based
reactive, goal-based and utility-based. More
specifically, the conception considers a synthesis of
the views of Wooldridge (2002) about agent abstract
architectures, and of Russell and Norvig (2004)
about the four structures of the mentioned agents
programs.
Figures 2 and 3 illustrate some of the information
modules (subsystems) proposed by Wooldridge
(2002) to the simple reactive internal state agents,
respectively, considered by the ProMon agent for
the diagnosis of faults in the tested agent.
Figure 2: Subsystems of the simple reactive agent.
Figure 3: Subsystems of the agent with internal state.
4.2.2 Functionality of the ProMon Agent
The ProMon agent receives: (1) a test case set,
TestCASES containing these test cases where the
Agent had an inadequate behavior, (2) the histories
of the Agent in Env and the values associated with
performance evaluation, episode by episode.
Considering this information, the ProMon agent
must send it to the designer: (1) episodes in all
histories that the Agent failed and corresponding
ideal episodes, and (2) an identification of the fault
type, indicating the information processing
subsystem of the Agent, i.e.: (a) perception
subsystem, see, (b) update internal state subsystem,
next, and (c) decision-making subsystem, action.
The ProMon agent was designed as a model-
based reactive agent. More specifically, the
monitoring process and diagnosis of fault performed
by the ProMon agent was proposed to be conducted
in two stages, corresponding to the processing of a
subsystem of next and action. In the first stage, the
next function of the agent receives the histories
associated from the cases in TestCASES
H(TestCASES) and identifies all the episodes
containing faults in these histories.
Thus, as in the case of the Thestes agent, this
function considers the ProtocolInteraction protocol,
and environment program Env and a fully
observable version of the tested agent (omnipresent),
denoted by Agent* to identity whether an episode in
an interation K, in a history associated case I in
TestCASES, and generates two episode sets: the
ideal episode set in the interaction, Ep
ideals
K
, and the
set of episodes with faults of the histories associated
cases in TestCASES, Ep
faults
.
According to the test case problem formulated
by the Thestes agent, the notation used is:
Agent: a rational agent program to be tested;
Agent
*
: a omnipresent version of program to be
tested;
Env: an environment program able to interact
with Agent through of ProtocolInteraction;
h(Case
i
) (PxA)
NInt
:a history of size N
Int
of
Agent in Env corresponding to the Case
i
ICEIS2015-17thInternationalConferenceonEnterpriseInformationSystems
588

TestCASES;
h
*
(Case
i
) (PxA)
NInt
: a history of size N
Int
of
Agent
*
in Env corresponding to the Case
i
TestCASES;
Ep
K
(h(Case
i
)) PxAor, more specifically,
Ep((P
K
, A
K
))) PxA an episode in the
interaction K of the history of Agent in Env
corresponding to the case Case
i
TestCASES.
Ep
K
(h
*
(Case
i
)) PxA or, more specifically,
Ep((P
K
, A
K
*))) PxA an episode in the
interaction K of the history of Agent
*
in Env
corresponding to the Case
i
TestCASES.
The ideal episodes set in an interaction K, Ep
ideals
K
,
consists of all possible episodes that would be
produced by Agent* in interaction, Ep((P
K
,
A
K
*)),which satisfies at least one of the following
two conditions:
(1) For every attribute m in measure of performance
evaluation:
ev
m
(Ep((P
K
, A
K
*))) ev
m
(Ep((P
K
, A
K
)));
(2) A
K
* is better than or equivalent to A
K
while
considering the viewpoint of the designer.
And, consequently episodes Ep((P
K
, A
K
)), produced
by tested agent Agent which do not belonging to
Ep
ideals
K
set, must compose the episodes with faults
set, Ep
faults
.
The condition (2) depends on the viewpoint of
the designer. It was introduced to identity faults that
are not perceived directly for the specification of
measuring performance evaluation. Thus, unlike the
condition (1), which considers the measure of
performance evaluation, the condition (2) should be
specified according to the scope of the tested agent,
Agent.
Ending the stage of identifying the episodes that
are faults in all interactions K in histories associated
with the cases in TestCASES, held by next function
of ProMon agent, the second stage of monitoring
and diagnosis of agent can be initiated. In this stage,
the action function of the agent uses the episodes
Ep
faults
set and an action function based in condition-
action rules to identify the fault type associated to
the episode with faults in an specific interaction
Ep((P
K
, A
K
)), considering itself as the episode, the
values of evaluation are associated to the episode in
all the attributes m in performance measure
ev
m
(Ep((P
K
, A
K
))), and the ideal episodes Ep((P
K
,
A
K
*)) in Ep
ideals
K
, produced by Agent* in same
interaction.
The ProMon agent was designed with generic
rules to the case in which the Agent is a simple
reactive agent or a model-based agent. The
antecedents in these rules consist of two conditions
associated to the conditions (1) and (2) previously
described. These conditions associated indicate the
reason why an episode with fault Ep((P
K
, A
K
) was
inserted into an Ep
fault
set, i.e.:
(1)’ there is at least an attribute x which ev
x
(Ep((P
K
,
A
K
*))) > ev
x
(Ep((P
K
, A
K
))), while the rest of the
attributes ev
m
(Ep((P
K
, A
K
*))) ev
m
(Ep((P
K
,
A
K
)));
(2)’ A
K
* is better than A
K
.
The results of the rules are messages sent to the
designer of the Agent. The first message indicates
the condition is satisfied, the reason for the episode
belonging to the Ep
fault
set. The second message
consists of a disjunction involving rules of the form
“consequent if antecedent”, i.e., “Fault in Module X
if Condition Y is satisfied”. These are messages that
are sent to the designer to evaluate the conditions
described in its antecedents and to perceive what
processing information modules in Agent are
possibly causing the faults, according to the
conditions (1)’ and (2)’.
Thus, as in the antecedent of each rule suggested
is proposals involving the outputs of the processing
information modules of the tested agent Agent and
the agent with fully observable Agent*, the approach
with the ProMon agent assumes that the designer
has control of the tested agent and is able to compare
the processing performed by the modules of Agent
with the processing performed by the modules of
Agent*.
When the perception subsystem of Agent*
produces an information State
K
different from the
produced subsystem of the Agent and the designer
assumes that the decision-making subsystem of
Agent would be able to select an ideal action A
K
*,
i.e., one of the actions selected by Agent* and
presents in Ep
ideals
K
, in case it had the information
State
K
, the rules indicate that the fault is in the
perception subsystem of the Agent. If there is no
fault in see function, the rules indicate the fault is in
decision-making subsystem of Agent, i.e., despite
perceiving how Agent*, the designer assumes that
the tested agent Agent could not make equivalent
decisions. Besides the two possibilities, the rules
also indicate that fault may be present in the two
subsystems.
For the case when the internal state of the Agent
is different from the information produced by a
perception subsystem of the Agent* and the designer
assume that the decision-making subsystem of the
Agent would be able to select an ideal action A
K
* to
MonitoringandDiagnosisofFaultsinTestsofRationalAgentsbasedonCondition-actionRules
589

State
K
, the rules indicate that the fault is in the next
function. Whereas there is no fault in the next
function, these rules indicate that the fault is in
decision-making subsystem of the model-based
reactive agent Agent. Finally, the rules indicate that
the fault may be present both in next and action
functions.
It is noteworthy that the rules applied to the
model-based reactive agent considers no possibility
of the fault in the see function of this agent, meaning
that, specifically in this case, the designer knows the
limitations of the agent in terms of observing the
environment and, therefore, designed a next
function, i.e., to minimize the low reliability of the
see function. Thus, for the designer, it is more
important to perceive if there are faults in the next
function. However, if desired, may include rules for
fault in the see function of the model-based reactive
agent. Although not specified, the rules adopted for
this agent can be adapted to the goal-based and
utility-based agents, since these agents can also be
described in terms of components: see, next and
action.
5 EXPERIMENTAL
EVALUATION
In this section, we illustrate the operation of ProMon
agent. In our experiments, two versions of cleaner
agent (described by Russell and Norvig, 2013) are
implemented: (i) simple reactive agents and (ii)
reactive agent with internal state. Both are evaluated
in environment with several places considering the
energy and cleaning attributes.
5.1 Measure of Performance
Evaluation
Table 1 shows the measure of performance
evaluation used in the experiments. Ideally a cleaner
agent program should clean the environment and
maximize levels of cleaning the environment and
energy in your battery at the end of the task. The
first column describes some of the information on
the perceptions of the agent in each possible episode.
The second column describes the possible action on
these episodes. In the third and fourth columns,
respectively, associated to the energy and cleaning
goals, two scalars functions (ev
E
e ev
C
) to measure
the performance of the agent in each episode of your
history in the environment. The fifth column
highlights only the episodes that represent
inappropriate behavior, probably due to a fault in see
function and/or in set of condition-action rules in
action function of cleaner programs.
Table 1: Measure of performance evaluation.
Ep
K
= (P
K
, A
K
) ev
E
(Ep
K
) ev
C
(Ep
K
) Fault
...,C, ... Suck -1.0 0.0 x
...,C, ...
Right, Left,
Below,
Above
-2.0 1.0
...,C, ... No-op 0.0 0.0
...,D, ... Suck -1.0 2.0
...,D, ...
Right, Left,
Below,
Above
-2.0 -1.0 x
...,D, ... No-op 0.0 -1.0 x
It is noteworthy that the measure of performance
evaluation in Table 1 does not implicitly point out
the negative aspects of the see function, since the
value assigned to each episode is independent of the
state of the other places in the environment, different
to the place where the cleaner is.
5.2 Tested Agents
The simple reactive cleaner agent program
(SR_Partial) focuses on the selection of actions
based on current perception, ignoring the historical
perceptions obtained in a partially observable
environment, i.e., the see function of SR_Partial
allows perception only for the state, dirty or clean, of
the place in which the agent is. Figure 4 shows the
condition-action rules of SR_Partial.
if state is Dirty then do Suck
if state is Clean then do random motion (Right, Left, Above,
Below)
Figure 4: Condition-action rules of SR Partial.
The second agent program tested was designed
according to the structure of the reactive with
internal state with partially observable environment
(RIS_Partial). This agent has an internal state with
store the historic of perceptions that are considered
to the action selection process. Figure 5 shows the
condition-action rules of RIS_Partial.
If state is Dirty then do Suck
If state is Clean and NotVisit(north) then do Above
If state is Clean and NotVisit(south) then do Below
If state is Clean and NotVisit(east) then do Right
If state is Clean and NotVisit(west) then do Left
If state is Clean and visited all then do random action
Figure 5: Condition-action rules of RIS Partial.
ICEIS2015-17thInternationalConferenceonEnterpriseInformationSystems
590
5.3 ProMon Agent
The ProMon agent considers that the ideal episodes
set in a interaction K, Ep
ideals
K
, consists of all
possible episodes that would be produced by Agent*
in interaction, Ep((P
K
, A
K
*)) compared to the
corresponding episode produced by Agent, Ep((P
K
,
A
K
)), in the same interaction.
In the case of cleaner agent, three types of
episodes with faults Ep((P
K
, A
K
)) may occur
satisfying the Condition (1)’, corresponding to lines
1, 5 and 6 of Table 1.
For episodes with faults that compete for a
satisfaction of Condition (2)’, two types may occur,
considering two possible situations identified by
designer, but that are not explicitly defined in Table
1:
i. Agent moved to a neighboring place different
from another neighboring place that contained
dirt;
ii. Agent moved unnecessarily to a neighboring
place previously visited.
Thus, ProMon identifies the faults associated with
the episodes considering five possible of flawed
episodes and the condition-action generic rules. It is
noteworthy to identity the subsystem that is causing
the fault is provided by the designer interpreting the
messages sent by ProMon.
5.4 Experiment with ProMon Agent
This section presents the experiments considering
the monitoring and diagnosis of faults of cleaner
agent made by ProMon agent.
Table 2 shows five episodes of the simulation of
the interaction between Agent in Env generated by
the Thestes agent, in the test case which achieved the
best average value of utility for simple reactive
agent.
Table 2: Partial history of AgentinEnv.
K P
K
A
K
-ev
E
(P
K
, A
K)
-ev
C
(P
K
, A
K
)
1 ...,Clean,... Below 2.0 -1.0
2 ...,Clean,... Right 2.0 -1.0
3 ...,Clean,... Below 2.0 -1.0
4 ...,Dirty,... Suck 1.0 -2.0
5 ...,Clean,... Left 2.0 -1.0
The selected environment is composed of places
with the following configuration: [[C,C,C,C,D],
[C,C,D,D,C], [C,D,D,D,D], [C,C,C,D,D],
[C,C,D,D,D]]. The utility value is U = 15.5 and the
values of inadequacy: –f
E
= 49.0 e –f
C
= -26.0. The
other episodes related to the history of Agent in Env
follow the same pattern.
With this information, Thestes is sent by ProMon
to perform the monitoring and diagnosis of faults.
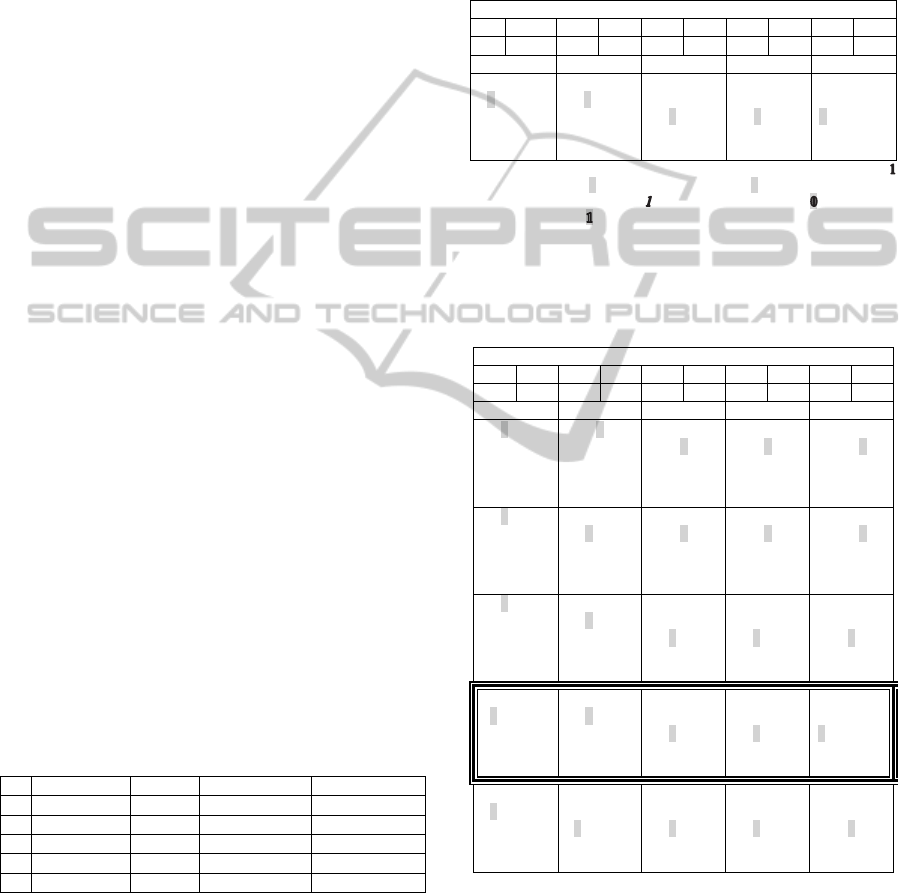
Table 3 illustrates the episodes 1 to 5 in the history
of Agent in Env shown in the Table 2.
Table 3: Partial history of SR_Partial.
History – Ep
1
, Ep
2
, Ep
3
, Ep
4
, Ep
5
-ev
E
-ev
C
-ev
E
-ev
C
-ev
E
-ev
C
-ev
E
-ev
C
-ev
E
-ev
C
2.0 -1.0 2.0 -1.0 2.0 -1.0 2.0 -1.0 2.0 -1.0
Fault: No Faul: No Fault: No Fault: No Fault: Yes
0,0,0,0,1
0,0,1,1,0
0,1,1,1,1
0,0,0,1,1
0,0,1,1,1
0,0,0,0,1
0,0,1,1,0
0,1,1,1,1
0,0,0,1,1
0,0,1,1,1
0,0,0,0,1
0,0,1,1,0
0,1,1,1,1
0,0,0,1,1
0,0,1,1,1
0,0,0,0,1
0,0,1,1,0
0,0,1,1,1
0,0,0,1,1
0,0,1,1,1
0,0,0,0,1
0,0,1,1,0
0,0,1,1,1
0,0,0,1,1
0,0,1,1,1
Symbols used: 0 (clean place), 1 (dirty place), 0 (clean place visited),
(dirty place visited), 0 (agent is in a clean place), 1 (agent is in dirty place),
0(agent was in a clean place), (agent was in dirty place), (agent is in a
visited clean place), (agent is in visited dirty place).
Table 4 shows the ideals episodes set produced
by Agent* to the episodes shown in Table 3.
Table 4: Ideals episodes produced by Agent*.
Ideal Histories – Ep
1
, Ep
2
, Ep
3
, Ep
4
, Ep
5
-ev
E
-ev
C
-ev
E
-ev
C
-ev
E
-ev
C
-ev
E
-ev
C
-ev
E
-ev
C
2.0 -1.0 2.0 -1.0 2.0 -1.0 2.0 -1.0 2.0 -1.0
Fault: No Faul: No Fault: No Fault: No Fault: Yes
0,0,0,0,1
0,0,1,1,0
0,1,1,1,1
0,0,0,1,1
0,0,1,1,1
0,0,0,0,1
0,0,1,1,0
0,1,1,1,1
0,0,0,1,1
0,0,1,1,1
0,0,0,0,1
0,0,1,1,0
0,1,1,1,1
0,0,0,1,1
0,0,1,1,1
0,0,0,0,1
0,0,0,1,0
0,0,1,1,1
0,0,0,1,1
0,0,1,1,1
0,0,0,0,1
0,0,0,1,0
0,0,1,1,1
0,0,0,1,1
0,0,1,1,1
0,0,0,0,1
0,0,1,1,0
0,1,1,1,1
0,0,0,1,1
0,0,1,1,1
0,0,0,0,1
0,0,1,1,0
0,1,1,1,1
0,0,0,1,1
0,0,1,1,1
0,0,0,0,1
0,0,1,1,0
0,1,1,1,1
0,0,0,1,1
0,0,1,1,1
0,0,0,0,1
0,0,0,1,0
0,1,1,1,1
0,0,0,1,1
0,0,1,1,1
0,0,0,0,1
0,0,0,1,0
0,1,1,1,1
0,0,0,1,1
0,0,1,1,1
0,0,0,0,1
0,0,1,1,0
0,1,1,1,1
0,0,0,1,1
0,0,1,1,1
0,0,0,0,1
0,0,1,1,0
0,1,1,1,1
0,0,0,1,1
0,0,1,1,1
0,0,0,0,1
0,0,1,1,0
0,1,1,1,1
0,0,0,1,1
0,0,1,1,1
0,0,0,0,1
0,0,1,1,0
0,0,1,1,1
0,0,0,1,1
0,0,1,1,1
0,0,0,0,1
0,0,1,1,0
0,0,1,1,1
0,0,0,1,1
0,0,1,1,1
0,0,0,0,1
0,0,1,1,0
0,1,1,1,1
0,0,0,1,1
0,0,1,1,1
0,0,0,0,1
0,0,1,1,0
0,1,1,1,1
0,0,0,1,1
0,0,1,1,1
0,0,0,0,1
0,0,1,1,0
0,1,1,1,1
0,0,0,1,1
0,0,1,1,1
0,0,0,0,1
0,0,1,1,0
0,0,1,1,1
0,0,0,1,1
0,0,1,1,1
0,0,0,0,1
0,0,1,1,0
0,0,1,1,1
0,0,0,1,1
0,0,1,1,1
0,0,0,0,1
0,0,1,1,0
0,1,1,1,1
0,0,0,1,1
0,0,1,1,1
0,0,0,0,1
0,0,1,1,0
0,1,1,1,1
0,0,0,1,1
0,0,1,1,1
0,0,0,0,1
0,0,1,1,0
0,1,1,1,1
0,0,0,1,1
0,0,1,1,1
0,0,0,0,1
0,0,1,1,0
0,0,1,1,1
0,0,0,1,1
0,0,1,1,1
0,0,0,0,1
0,0,1,1,0
0,0,1,1,1
0,0,0,1,1
0,0,1,1,1
The SR_Partial agent program is not made faults
in the first four interactions maintained with Env,
because the four episodes produced by SR_Partial
belong to the ideal episodes set Ep
ideals
K
, generate in
the four interactions (K = 1, …, 4) of Agent* in Env
(each column in Table 3 of the episodes 1 to 4
MonitoringandDiagnosisofFaultsinTestsofRationalAgentsbasedonCondition-actionRules
591

corresponds to a episode ideals set in a interaction),
as outlined in Table 4.
The SR_Partial agent committed a fault in
episode 5, i.e., there is a better action with ‘Left’ in
this episode, i.e., ‘Right’ that leads the agent to the
neighboring dirty place. In this case, the fault
indicates that whoever is causing this fault is the see
function of the agent, since the action function of
SR_Partial could be able to choose the ‘Right’
action if it knew that the place to your right was
dirty. In this case, despite the evaluation values of
SR_Partial and Agent* are equals, the agent avoids
to gain a point by not moving to a dirty place.
The same procedure is performance for all the
histories of Agent in Env. Thus, as expected, the
cleaner agent with simple reactive architecture and
partial observability presents the worst performance
in the evaluation, to realize a brief analysis in the
condition-action rules the agent doesn’t consider the
perceptions and the actions previously related to
energy and cleaning objectives. Since the designer
receives the information of the episodes that are
flawed, it is possible to make changes in its internal
structure to improve its performance, allowing it to
run actions better.
6 CONCLUSIONS
Considering which rational agent should be able to
accomplish your goals, appropriate tests should be
developed to evaluate the actions and plans executed
by the agent when achieving these goals in its task
environment. The motivation of this research is due
the gap in terms of testing techniques specifically
applied to autonomous agents, so that they can
evaluate the behavior and the confidence of agent-
based systems.
The information generated by the approach
indicated a measure of average utility associated
with the performance of the tested agent and
objectives as evaluation that is not being satisfied.
Considering the best set of histories of the agent in
its environment, associated to the selected test case
set by approach the end of the search process, the
designer and/or other auxiliary automatic systems
can identity those problematic episodes, and what
subsystems processing information and information
associated modules are causing the unsatisfactory
performance on the agent.
For future work we suggest the development of
conditional-action rules for goals-based and utility-
based agent programs as well as investigation into
other aspects that may be included in the diagnosis
of the ProMon agent that contribute to the
identification of problematic episode agents.
REFERENCES
Houhamdi, Z. 2011. Multi-Agent System Testing: A
Survey. In International Journal of Advanced
Computer Science and Applications (IJACSA). v. 2, n.
6.
Houhamdi, Z., 2011. Test Suite Generation Process for
Agent Testing. In Indian Journal of Computer Science
and Engineering (IJCSE). v. 2, n. 2.
Mylopoulos, J., Castro, J., 2000. Tropos: A Framework for
Requirements-Driven Software Development. In
Information Systems Engineering: State of the Art and
Research Themes, Lecture Notes in Computer Science,
Springer.
Nguyen, C. D., Perini, A., Tonella, P., Miles, S., Harman,
M., Luck, M., 2012. Evoluctionary Testing of
Autonomous Software Agents. In Autonomous Agents
and Multi-Agent Systems. v. 25, n. 2, p. 260-283.
Padgham, L., Zhang, Z., Thangarajah, J., Miller, T. 2013.
Model-Based Test Oracle Generation for Automated
Unit Testing of Agent Systems. In IEEE Transactions
on Software Engineering. v. 39, n. 9.
Pressman, R. S.; Maxim, B. 2014. Software Engineering:
A Practitioner’s Approach. 8 ed. McGraw-Hill.
Russell, S., Norvig, P., 2013. Inteligência Artificial: uma
abordagem moderna, Campus. São Paulo, 3
rd
edition.
Silveira, F. R. V.; Campus, G. A. L.; Cortés, M. I. 2013.
Rational Agents for the Test of Rational Agents. IEEE
Latin America Transaction, v. 11, n. 1, feb.
Silveira, F. R. V., Campos, G. A. L., Cortés, M. I., 2014.
A Problem-solving Agent to Test Rational Agents.In
16
th
International Conference on Enterprise
Information Systems (ICEIS 2014).
Sommerville, I., 2011. Engenharia de Software, Pearson
Addison Wesley. São Paulo, 9
th
edition.
Wooldridge, M., 2002. An Introduction to MultiAgent
Systems.John Wiley & Sons.
ICEIS2015-17thInternationalConferenceonEnterpriseInformationSystems
592
