
A Learning Model for Intelligent Agents Applied to Poultry Farming
Richardson Ribeiro
1
, Marcelo Teixeira
1
, Andr´e L. Wirth
1
, Andr´e P. Borges
2
and Fabr´ıcio Enembreck
2
1
Department of Informatics, Federal University of Technology-Paran´a, Pato Branco, Brazil
2
Graduate Program in Computer Science, Pontificial Catholical University-Paran´a, Curitiba, Brazil
Keywords:
Intelligent Agents, Broiler Management and Decision Making Problems.
Abstract:
This paper proposes a learning model for taking-decision problems using intelligent agents technologies com-
bined with instance-based machine learning techniques. Our learning model is applied to a real case to support
the daily decisions of a poultry farmer. The agent of the system is used to generate action policies, in order to
control a set of factors in the daily activities, such as food-meat conversion, amount of food to be consumed,
time to rest, weight gain, comfort temperature, water and energy to be consumed, etc. The perception of the
agent is ensured by a set of sensors scattered by the physical structure of the poultry. The principal role of the
agent is to perform a set of actions in a way to consider aspects such as productivity and profitability without
compromising bird welfare. Experimental results have shown that, for the decision-taking process in poultry
farming, our model is sound, advantageous and can substantially improve the agent actions in comparison with
equivalent decision when taken by a human specialist.
1 INTRODUCTION
The use of learning systems based on intelligent
agents (Castelfranchi, 1997; Maes, 1995) is an alter-
native to address a number of computational prob-
lems, such as vehicle control (Au et al., 2014),
games and robotics (Bachrach et al., 2014; Cobo
et al., 2013), vehicular traffic control (Ribeiro et al.,
2012; Jiang et al., 2014), collective decision making
(Ribeiro and Enembreck, 2013; Ribeiro et al., 2013),
etc. In this work, we propose a learning model using
intelligent agents supported by learning techniques
based on instances (Aha et al., 1991). Our approach
has the advantage of providing flexibility to construct
data models and training sets, eliminating the need of
a prior heuristic.
The proposal to be described can be summarized
as follows. We aim to generate action policies from
historical data of broiler management, emerging an
expert system able to assist poultry farmers in the
decision-making process. Usually, predictive systems
require distributed and flexible approaches to become
usable in industrial scale, since they are required to
adapt themselves to dynamic environments. In this
context, agent-based approaches are appropriate for
the construction of open, distributed, heterogeneous
and flexible architectures, that can offer a variety of
services without imposing architectural constraints.
Thus, the incremental development of the agent in the
decision making process based on machine learning
algorithms becomes easier (Enembreck and Barth`es,
2005). The agent developed in this paper takes results
from a machine learning process, including the ex-
traction of knowledge from database of previous pro-
duction systems.
Pragmatically, it has been implemented machine
learning techniques to extract information from his-
torical data of broiler management, providing the
agent with such information and examining its be-
havior in the decision-making process. The decision-
making itself occurs on a set A of activities performed
in broiler management (Ferket and Gernat, 2006).
Activities that define A involve actions occurring
throughout the broiler chicken life cycle, which inter-
fere on factors such as: amount of consumed feed and
water, light, ventilation, humidity, resting time, and
temperature control. These factors directly impacts
on the amount of food that is consumed, with respect
to the amount of meat that is produced. This relation
is called Feed Conversion Ratio (Fontana et al., 1992)
and is crucial to the success of the broiler production
system.
The decision-making process is the result of the
agent’s action policy in the environment (aviary). An
action policy represents the behavior that the action
causes, e.g., increasing, maintaining or decreasing the
495
Ribeiro R., Teixeira M., L. Wirth A., P. Borges A. and Enembreck F..
A Learning Model for Intelligent Agents Applied to Poultry Farming.
DOI: 10.5220/0005373604950503
In Proceedings of the 17th International Conference on Enterprise Information Systems (ICEIS-2015), pages 495-503
ISBN: 978-989-758-096-3
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

temperature, the humidity, the amount of food, etc.
These actions interfere on the productivity indicators.
To define an action policy, the agent receives a set
of resources, such as qualitative characteristics of the
environment or knowledge bases containing actions
from previous managements. A good action policy
is achieved when the productivity is somehow im-
proved, in terms of feed conversion.
In the paper, we evaluate and validate our estima-
tions by comparing them against field tests, conducted
using real data from poultry farming. The behavior
observed from the agent has been confronted against
empirical decisions taken by human experts (farmers)
when handling the process. The same configuration
has been assumed for the scenario. To classify opti-
mized actions, we apply an instance-based algorithm
over historical data.
The manuscript is structurally organized as fol-
lows: Sections 2 and 3 respectively introduce ba-
sic concepts on poultry farming and related machine
learning techniques. Section 4 presents the proposed
model, which is experimentally evaluated in Section
5. Finally, Section 6 presents some conclusions and
perspectives.
2 POULTRY INDUSTRY
Poultry farming is the raising domesticated birds.
Among the birds in poultry stand out the species
G. gallus, subspecies G. g. domesticus with trino-
mial name of Gallus gallus domesticus - or simply
chicken. When it is raised for meat production it is
called broiler poultry (Charles and Stuart, 2011). On a
smaller scale, there are also bred birds such as ducks,
goose, quail, turkeys, ostriches, pheasants etc.
The broiler poultry farming is an economic ac-
tivity increasingly important worldwide. In 2013,
the world chicken meat production accounted 82,178
(1,000 MT), being 16,958 (USA); 13,500 (China);
12,308 (Brazil); 9,750 (EU- 27); 3,420 (India), and
28.242 (others). In Brazil, the production of the
subspecies G. g. domesticus reached 12.30 million
tons in 2013, corresponding to a growth in compar-
ison with 2012, when 12.23 million tons were pro-
duced. With this performance, Brazil is getting close
to China, currently the second largest world producer,
whose production in 2013 summed up 12.550 million
tons, only behind the United States, with 16.648 mil-
lion tons, according to projections from the US De-
partment of Agriculture (USDA)
1
.
1
Brazilian Poultry Association (2014). “Annual Re-
port”, 2013/2014. www.brazilianchicken.com.br.
The growth in 2013 was largely driven by the in-
creased consumption of chicken meat and the 5.1%
expansion in exports, with a total 3.8 million tons of
chicken exported to more than 150 countries. Out of
the total national production of chicken, 69% was in-
tended for domestic consumption, and 31% for ex-
ports.
The growth and economic impact of broiler poul-
try farming shows its importance. Increased pro-
ductivity, reduced costs and environmental aspect
and well-being of animals has forced the industry to
modernize processes, with public and private invest-
ments in genetic improvementresearch (Closter et al.,
2012); immunology, health and disease (Lee et al.,
2011);quality programs and good manufacturing
practices (Northcutt and Jones, 2004); metabolism
and nutrition (Shariatmadari, 2012); physiology, en-
docrinology and reproduction (Bakst et al., 2012);
modernization of industrial processes, e.g. process-
ing, products and food Safety (Tavarez et al., 2011);
and the development of computer-aided solutions.
The development of expert system is the scope of this
work.
(Arowolo et al., 2012) developed an expert system
for diagnosing poultry diseases which could also be
used both by the farmer and the experts to train their
students. The knowledge (elicited from the experts
and literature review) was represented in the system
using a rule-based approach. The Unified Modeling
Language was used to describe the design of the sys-
tem. The expert system was tested using design crite-
rion and knowledge-base expert system for stratified
root.
(Maseleno and Hasan, 2012) built a web map-
ping and Dempster-Shafer theory as an early warning
system of poultry diseases. Dempster-Shafer theory
combines beliefs in certain hypotheses under condi-
tions of uncertainty and ignorance, and allows quan-
titative measurement of the belief and plausibility in
identification result. Web Mapping is also used for
displaying maps on a screen to visualize the result of
the identification process. The result reveal that poul-
try diseases warning system has successfully identi-
fied the existence of poultry diseases and the maps
can be displayed as the visualization.
(Schmisseur and Pankratz, 1989) proposed an
expert/knowledge-based microcomputer program to
the diagnose layer management problems and recom-
mend expert remedial management advice. The pro-
gram also provokes management action by calculat-
ing the economic loss attributed to major management
problems. It analyzes data generated by a commer-
cially marketed layer performance financial micro-
computer program and has demonstrated the ability
ICEIS2015-17thInternationalConferenceonEnterpriseInformationSystems
496

to emulate poultry management experts in the diag-
noses of 80 individual layer management problems.
The program provides scarce expert poultry manage-
ment advice to poultry layer managers regardless of
size and scale of operation.
In spite of the extensive options of poultry farming
technology, few computer systems are specialized in
applying machine learning techniques to automate the
decision-taking process. In the following, we present
some alternatives that have been used for that pur-
pose in industry, highlighting the novelties and ben-
efits brought by this particular paper.
3 AUTOMATIC LEARNING
Techniques based on imperative programming, com-
bined to empirical knowledge and formal methods
(Teixeira et al., 2014) can be applied to coordinate
sequences of operations in factory automation. Such
sequences can then be commanded by conventional
tools and technologies for automation, and performed
without human intervention.
In a number of practical problems, the exploitation
of those pre-programmedsequences may identify bot-
tlenecks that, when properly addressed, could lead to
significant improvements on the production system,
either in terms of process performance or quality of
manufactured items. For that, nevertheless, one has to
consider dealing with dynamic variables that appear
along the process, such as temperature, pressure, flow
and rates of resources to be consumed, etc. Learn-
ing mechanisms are alternatives to be combined to
imperative programming in order to handle it. This
approach allows to analyze industrial problems char-
acterized by sequences of events which are unknown
a priori and depend on the dynamics of the environ-
ment and on the availability of resources.
The ability for a system to learn, so performing
complex tasks better than human specialists, is of
great value for industry. Traditionally, such learn-
ing process has been hand-crafted, capturing from a
human expert intuitions about the process, which re-
quires a tedious and extensive human effort, while the
results are imprecise, mixed and poor, in general.
In contrast, a successful learning machine is able
to learn a given industrial task purely from computa-
tional effort, without the intellectual help of a human
expert (even though he exists). In most cases and
successful domains, such automatic learning tech-
niques have performed significantly better than the
best hand-crafted efforts (Andrieu et al., 2003).
In spite of the apparent advantages, few ap-
proaches have applied machine learning techniques
to develop agent-based architectures to support the
decision-making process in industry. The main rea-
son why this approach does not reach industrial scale
is that the choice for the appropriate learning method
to be used depends on the application itself, and this
decision may not be straightforward. What it is ob-
served is that applying machine learning on large and
complex problems implies to handle a large and intri-
cate combination of variables and instances. There-
fore it may not be trivial to extend the theory to prac-
tical problems (e.g., poultry farming), due to the in-
herent computational cost.
4 PROPOSED MODEL
An alternative to make machine learning practically
feasible is to combine the approach to Case-Based
Reasoning (CBR) models (Amores, 2013; Leake and
McSherry, 2005). A case can be seen as a tuple of
attributes of an instance, i.e. the records that com-
pose an instance of the problem. The basic idea of the
CBR method is to solve new instances of the prob-
lem according to solutions of previous ones (Aamodt
and Plaza, 1994; Abdel-Aziz et al., 2014; McSherry,
2014; Jaidee et al., 2013), which had been stored in
a knowledge database, in this paper denoted by train-
ing set (T S). The update of T S is a 3-steps process,
namely: (i) extract knowledge from previous situa-
tions; (ii) identify relevant characteristics on previous
cases construct better solutions; and (iii) store solved
problems as new learned cases (elements t
i
∈ T S).
The quality of a CBR solution basically depends
on the number of instances that define T S. For
each new instance to be solved, a comparison is con-
ducted against instances in T S, attempting to define
whether or not it improves the solution for the prob-
lem (Aamodt and Plaza, 1994). This procedure is
called classification. To classify new instances, we
adopt in this paper a learning algorithm called k-nn (k-
nearest neighbor)(Aha et al., 1991), which is appro-
priate to be used in conjunction to the CBR method.
The classification itself consists of finding a class
for any new (candidate) instance t
c
that arrives to be
evaluated. Following the k-nn algorithm, t
c
is firstly
loaded to memory and it is compared to everyt
i
∈ T S.
The element in T S that provides the shortest “dis-
tance” to t
c
determines the class it actually belongs.
In this paper, instances are represented by data tu-
ples and, so, we provide a model (see (1)) to imple-
ment the k-nn idea to classify them. We basically
compare the j
th
attribute of t
c
to the j
th
attribute of
every t
i
∈ T S. New instances are then derived based
on the distance similarity between T S and t
c
.
ALearningModelforIntelligentAgentsAppliedtoPoultryFarming
497

n
∑
i=1
∑
m
j=1
(t
j
i
·t
j
c
)
q
(
∑
m
j=1
(t
j
i
)
2
) · (
∑
m
j=1
(t
j
c
)
2
)
(1)
The idea behind the model in (1) is as follows.
Assume a training set T S such that each element
t
i
∈ T S, for i = 1, ··· , n, is a m-tuple hι
i
, τ
i
, µ
i
, ν
i
, γ
i
,
···m
i
i, indexed by j
i
, for j = 1, ··· , m. We also as-
sume that t
c
= hι
c
, τ
c
, µ
c
, ν
c
, γ
c
, ··· m
i
i is a singe can-
didate tuple, which is expected to be estimate, from
the training data, which class it belongs to. Thus, we
associate and normalize the tuples from T S and t
c
,
obtaining as a result their similarity degree.
4.1 Example
Consider that T S and t
c
are given as in Table 1.
Table 1: Parameters for the illustrative example.
T S ι
i
τ
i
µ
i
ν
i
γ
i
t
1
2 22 53 33 23
t
2
3 33 60 100 45
t
3
1 24 62 44 15
t
c
ι
c
τ
c
µ
c
ν
c
γ
c
3 28 65 17 22
By applying (1) to the example, we obtain a sim-
ilarity degree SD for t
c
with respect to i = 1, 2, 3 re-
spectively on the order of:
SD
1
= 0, 96 SD
2
= 0, 76 SD
3
= 0, 94
Therefore, for this particular example, SD
1
and
SD
3
clearly define the class t
c
belongs to.
5 EXPERIMENTAL RESULTS
Now, we use a more realistic example to illustrates
our approach. The broilers management process aims
to improve the performance of a breeding (flock) in
terms of feed conversion. Broiler production (broiler
is a type of chicken raised specifically for meat pro-
duction) is a sequential process where the ultimate
performance is dependent on the successful comple-
tion of a set of steps. Each step must be toughly as-
sessed and improvements are required for the max-
imum performance to be obtained. However, those
steps are all interdependent, in such a way that if one
of them is sub-optimal, then whole process perfor-
mance suffers. The success of the poultry is directly
related to environmental and feed control.
Data from the broilers management process can
be formally described by 5-tuples hι, τ, µ, ν, γi where:
• ι = 1, 2, 3 is the light density;
• τ, for t ≥ 18 ≤ 33, is the temperature value (C);
• µ, for u ≥ 50 ≤ 70, is the humidity value (%);
• ν ∈ N is the spent time ventilating the structure;
• γ ∈ N is the amount of consumed nutrients (feed).
Temperature and humidity are collected from sen-
sors. Ventilation time and light density can be ob-
tained from poultry environmental controller. In order
to measure the amount of consumed feed, we con-
struct an automatic scale (see Fig. 1) able to register
the total weight consumed per day.
weighing
box
feed
release
distribution
box
Figure 1: Mechanism for weighing feed.
We automate the supply and transportation equip-
ment, which has allowed us to measure flocks of feed
arriving to be consumed. For the experiments, the
scale has been adjusted to measure flocks of 50 kg,
starting to operate whenever the supplier engine ac-
tuates. By reaching 50 kg, the supplier engine is
switched off and the distribution engine starts to fill
the feeders. When this step is over, the scale resets
and the process restarts.
The weighing mechanism has been integrated to
our learning model by the electrical device in Fig.
2 (a), which detects when the feed amount reaches
the setting value (50 kg) and communicates this to a
server (voltage levels of 0 and 5 volts (Fig. 2 (b)))
through a parallel port. A monitoring software then
records the action.
(a)
(b)
Feed weigher
220v
50 kg
Voltage
reduction
device
Computer
5v
Figure 2: Device for voltage reduction.
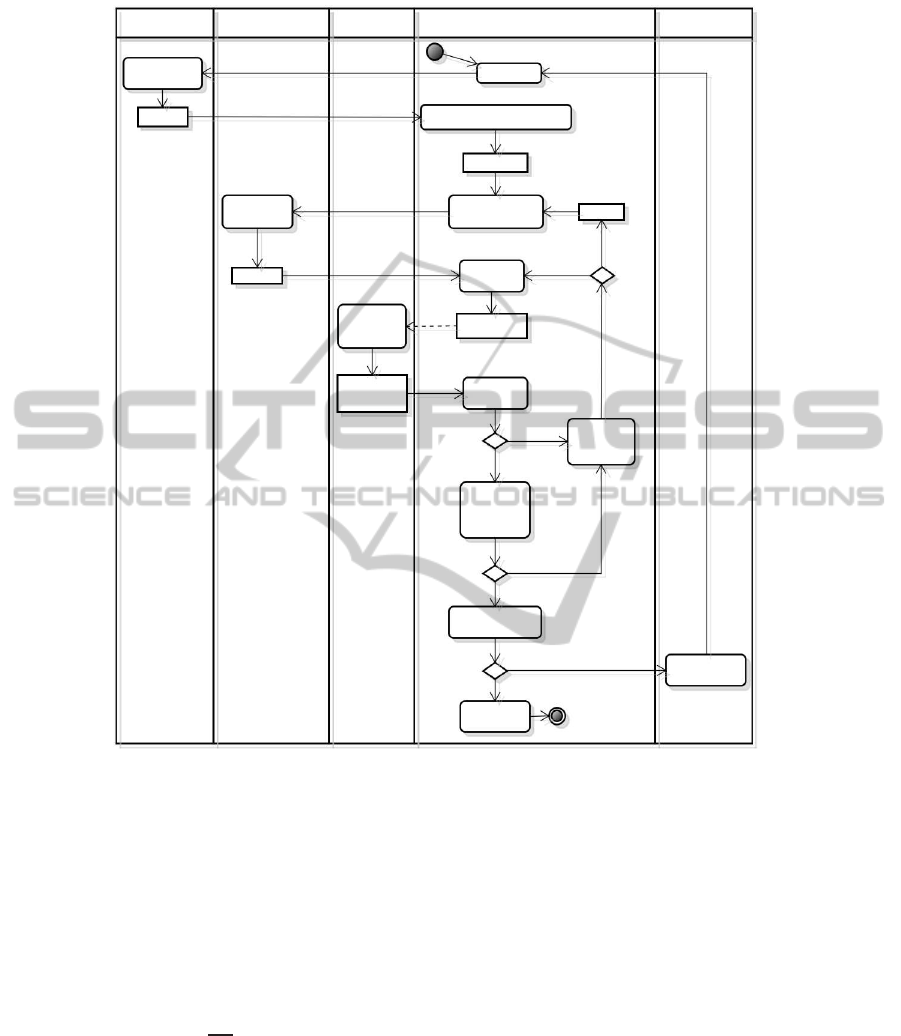
For our experiment to be suitable for analysis by
our learning model, the followingmodules are also in-
tegrated to the weighing mechanism, in order to prop-
erly compose instances: sensor, classifier, calculator,
decision and actuator, whose interaction is depicted in
Fig. 3.
ICEIS2015-17thInternationalConferenceonEnterpriseInformationSystems
498
Sensor
Classifier
Calculator
Decision-maker
Actuator
Read
perception
p: [ok]
Read data
Convert p in a vector
v: [ok]
v: [ok]
v: [ok]
Classify
c: [ok]
Submit v to
k-nn
Process
result
[Change management]
[c changed]
Calculate
conversion
x: [ok]
Refine
action
action
[Possible]
[Impossible]
Change
Validate
with human
expert
[valid]
[invalid]
Update base
Same week
Weekend
Relearn
Generate
Figure 3: Learning model interaction.
The sensor captures different parameters from a
flock, such as light density, temperature and humidity
values, time ventilating, consumed feed supply. The
actuator regulates (maintain, increases or decreases)
the values of model parameters. The calculator mod-
ule derives the value of the feed conversion (F
c
), tak-
ing into account the quantity of consumed food (Q
f
)
and the weight of the broilers (W
b
), according to the
Equation (2).
F
c
=
Q
f
W
b
(2)
The decision module is responsible for the agent
behavior. It receives data from sensors and generates
a perception p. The values of p are then structured as
a vector v in such a way that each position represents
the i
th
position of the 5-tuple that models an instance
of the problem to be solved. The vector v (instance)
is then submitted to the classifier, which returns an
action c. Based on the value of c it has to be computed
the values for the expected F
c
and remaining elements
in the tuple.
If the estimated value for the F
c
is less than the
reference value (from historical data), the state is
recorded in a log file and estimated actions effected
by the actuator. Otherwise, the amount of resources
is increased. This happens until the F
c
is smaller than
the conversion generated from managements of pre-
vious flocks.
If it is not possible to increase the amount of re-
sources of v, the previous management is maintained
and the F
c
is interactively recomputed until it finds a
value of F
c
able to optimize resources. The log gen-
eration allows to promote the process of re-learning,
although this is considered beyond this paper.
The knowledge obtained from the application of
machine learning can be represented by a set of rules,
as illustrated next.
ALearningModelforIntelligentAgentsAppliedtoPoultryFarming
499
R
1
: (F
c
< EXPECTED)∧
(FEED CONSUMPTION > EXPECTED)
=> ad just ι;
R
2
: (WEIGHT < EXPECTED) ∧
(FEED CONSUMPTION < EXPECTED) ∧
(LIGHT LEVEL ≥ 2)
=> increase τ;
···
R
1
is read as follows: “IF a feed conversion is less
than expected and feed intake is smaller than assumed
then adjust the light level”. The values for the ex-
pected and estimated parameters are suggested by a
human expert.
The rules presented above as well as the sequence
diagram in Fig. 3 are used in conjunction to the model
presented in Equation (1). An experiment is proposed
to further validate the proposed learning model.
5.1 Practical Example
In the following experiments, the actions suggested
by the proposed model are compared to the original
management, empirically carried out by a human ex-
pert. Table 2 shows the structure and the configuration
values for the experiments to be conducted.
Table 2: Structure and scenario configuration.
Parameters considered in our experiments
Amount of broilers 25.000
Amount of flocks (historical bases)
30
Number of weeks per flock
6
Dimension of the environment (poultry)
2.100 m
2
Silo for feed
27.000
Box of water
10.000 liters
Automatic feeders
780 dishes
Automatic waterers
3.000 nozzles
Ventilation system
24 fans
Nebulization system
300 nozzles
Temperature control panel
1
Heating furnace
1
The agent behavior has been evaluated under two
situations: i) based on the average weight of the broil-
ers; and ii) on the weekly feed conversion. Both cases
are discussed next.
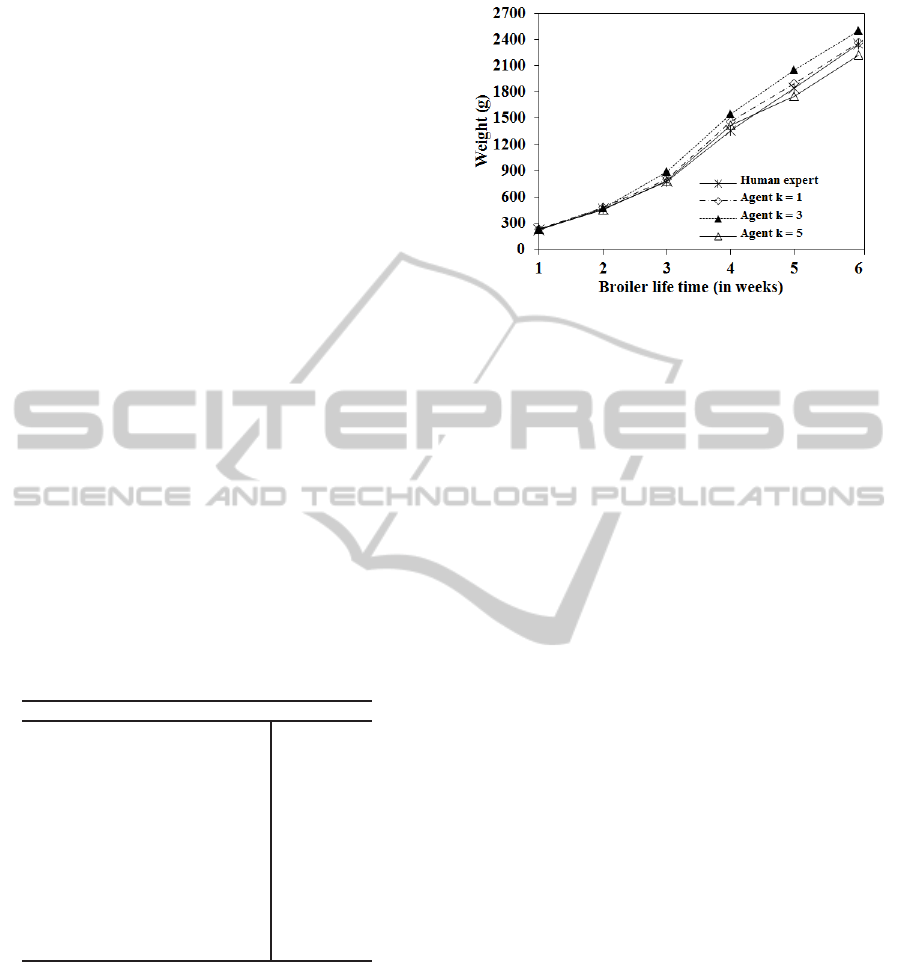
5.1.1 Broilers Weight
An action policy is satisfactory when management
employee increases the weight of the broilers and im-
proves the feed conversion. Fig. 4 shows the aver-
age weight of broilers along six weeks (period of one
flock).
Figure 4: Broilers average weight: Agent × Human expert.
Is possible to observe that the broilers average
weight is similar in the initial weeks. This occurs be-
cause during this period the growth process of broil-
ers is influenced by the dose of certain supplements.
From the third week is possible to notice that the man-
agement suggested by the agent obtains in general
better efficiency in the average weight of the broilers.
The best results were achieved with the agent using
k = 3, which led to a classification with a higher de-
gree of accuracy.
Remark also that the management suggested by
the agent can increase or maintain the average weight
of the broilers, because it uses historic data to gener-
ate combinatorial rules, a task that would be impracti-
cable by human expert, given the their potential com-
plexity. This complexity arises, for example, from the
amount of management features and related combina-
torial possibilities.
It is natural for the human expert to empirically
select and apply resources, without considering fac-
tors such as temperature, humidity, light, broilers rest-
ing time, etc., nor the combination of these factors.
In fact, the human expert merely observes and acts
according to his perception and knowledge, having
no mechanisms to improve the accuracy of such acts
on the process. On the other hand, techniques using
agents provide for the system a decision-making with
minimal human intervention, in order to anticipate en-
vironmental changes and act accordingly. This occurs
because during the learning procedure, an appropriate
number of samples are created and, at each manage-
ment, the agent seeks to specialize itself.
5.1.2 Feed Conversion
When a particular management is applied, feed con-
version is modified by a number of factors, such as
the environmental and structural conditions and daily
activities. To be efficient in the management, the
ICEIS2015-17thInternationalConferenceonEnterpriseInformationSystems
500

amount of feed should be constant and close enough
to the maximum capacity of the reservoir, thus opti-
mizing the time spent managing.
Usually, this is not trivial to be precisely estab-
lished, though. The feed × time relationship, seeking
for an efficient and profitable management, under dif-
ferent scenarios, can be complex even for a human
expert. In this sense, an agent always attempts to
maintain the amount of feed as close as possible to
the maximum level. In Fig. 5, it can be noted that the
feed conversion with the agent is more efficient when
compared to equivalent procedure conducted by a hu-
man expert. This occurs because the agent tends to
simultaneously increase the level of light, relative air
humidity and temperature. On the other hand, the hu-
man expert tends to maintain such features below the
expected value, attempting to achievefood conversion
using few resources.
Figure 5: Feed conversion: Agent × Human expert.
Clearly, the human expert faces difficulties to pre-
dict the exact effect of actions, thus making com-
plex the management planning throughout the broil-
ers life cycle, indicating a feed conversion lower than
expected. It has been observed that a proper (and
complex) combination of different resources is more
likely to lead to a higher average weight of broilers,
contrasted with a lower feed intake. From the val-
ues of average broiler weight and feed conversion ob-
tained from the use of the proposed learning model,
we have noticed a substantial improvement on the
broiler management process. Table 3 exemplifies the
increase we have obtained on the average of weight
and on the quality improvement of feed conversion,
per week, on the simulated flock.
It can be observed that when previous experiences
are recovered by the k-nn algorithm, the results are
satisfactory, because the system can classify values
from previous solutions, finding better results when
compared to the human expert. Another advantage of
the proposed model is that new processed cases lead
Table 3: Best agent compared to the human expert.
Week Weight (%) Feed Conversion (%)
1 4.25 2.04
2
1.05 4.34
3
11.96 9.28
4
9.28 7.99
5
12.38 6.25
6
6.00 7.85
Average 7.48 6.29
to new solutions, which allows the agent learn and
adapt its behaviors toward new situations.
6 CONCLUSIONS AND
PERSPECTIVES
Broiler managementis a complex task for humans due
to the number of factors influencing on the develop-
ment of broilers. In this paper, a learning model using
intelligent agents has been introduced to support the
automatic management of poultry farming. A learn-
ing agent controls the amount of feed, level of light,
ventilation, temperature and relative humidity using
the knowledge learned from previous cases (historical
databases). An algorithm has been applied to classify
patterns that improve feed conversion from previous
data managements.
It has been shown that the proposed model sub-
stantially improves the poultry farming process. For
the evaluated case, feed conversion improvements
have been on the order of 6%, while the gain with
broilers weight has increased in 7%. Despite promis-
ing preliminary results, additional research is yet re-
quired to complement the model and hopefullyabsorb
the diversity of scenarios in which the human expert
may be immersed.
Future research includes: i) evaluating the perfor-
mance of the agent when handling specific manage-
ment situations; (ii) checking the performance of the
algorithm to process variations of scenario; iii) chang-
ing the set of attributes used to generate the rules,
which can make them less susceptible to influence;
iv) verifying the learning algorithm with other met-
rics distance. Such statements are objects of study for
future research.
ACKNOWLEDGMENTS
We thank anonymous reviewers for their comments.
This research is supported by the Program for
Research Support of UTFPR, Directorate of Re-
search and Post-Graduation (DIRPPG) - campus
ALearningModelforIntelligentAgentsAppliedtoPoultryFarming
501

Pato Branco), Araucaria Foundation of Parana State
(Fundac¸˜ao Arauc´aria) and National Council for Sci-
entific and Technological Development (CNPq).
REFERENCES
Aamodt, A. and Plaza, E. (1994). Case-based reasoning:
Foundational issues, methodological variations, and
system approaches. Artificial Intelligence Communi-
cations, 7(1):39–59.
Abdel-Aziz, A., Strickert, M., and H¨ullermeier, E. (2014).
Learning solution similarity in preference-based cbr.
In Case-Based Reasoning Research and Develop-
ment: 22nd International Conference, ICCBR 2014,
ICCBR ’14, pages 17–31.
Aha, D. W., Kibler, D., and Albert, M. K. A. (1991).
Instance-based learning algorithms. Machine Learn-
ing, 6(1):37–66.
Amores, J. (2013). Multiple instance classification: Re-
view, taxonomy and comparative study. Artificial In-
telligence, 201:81–105.
Andrieu, C., de Freitas, N., Doucet, A., and Jordan, M. I.
(2003). An introduction to mcmc for machine learn-
ing. Machine learning, 50(1):5–43.
Arowolo, H., Weaver, W. D. Jr. and Amosa, B., and Faleye,
E. (2012). An expert system for management of poul-
try diseases. International Proceedings of Computer
Science & Information Tech., 47:113–117.
Au, T.-C., Zhang, S., and Stone, P. (2014). Semi-
autonomous intersection management. In Proceed-
ings of the 2014 International Conference on Au-
tonomous Agents and Multi-agent Systems, AAMAS
’14, pages 1451–1452.
Bachrach, Y., Savani, R., and Shah, N. (2014). Cooper-
ative max games and agent failures. In Proceedings
of the 2014 International Conference on Autonomous
Agents and Multi-agent Systems, AAMAS ’14, pages
29–36.
Bakst, M. R., Akuffo, V., Nicholson, D., and French, N.
(2012). Comparison of blastoderm traits from 2 lines
of broilers before and after egg storage and incubation.
Poultry Science, 91(10):2645–2648.
Castelfranchi, C. (1997). To be or not to be an agent. In
Proceedings of the Workshop on Intelligent Agents III,
Agent Theories, Architectures, and Languages, ECAI
’96, pages 37–39.
Charles, T. B. and Stuart, H. O. (2011). Commercial poultry
farming. Biotech Books, 6 th edition.
Closter, A. M., Van As, P., Elferink, M. G., Crooijmanns,
R. P. M. A., Groenen, M. A. M., Vereijken, A.
L. J., Van Arendonk, J. A. M., and Bovenhuis, H.
(2012). Genetic correlation between heart ratio and
body weight as a function of ascites frequency in
broilers split up into sex and health status. Southern
journal of agricultural economics, 91(3):556–564.
Cobo, L. C., Isbell, C. L., and Thomaz, A. L. (2013). Object
focused q-learning for autonomous agents. In Pro-
ceedings of the 2013 International Conference on Au-
tonomous Agents and Multi-agent Systems, AAMAS
’13, pages 1061–1068.
Enembreck, F. and Barth`es, J.-P. (2005). Ela – a new ap-
proach for learning agents. Autonomous Agents and
Multi-Agent Systems, 10(3):215–248.
Ferket, P. R. and Gernat, A. G. (2006). Factors that affect
feed intake of meat birds: A review. International
Journal of Poultry, 10(5):905–911.
Fontana, E. A., Weaver, W. D. J., Watkins, B. A., and Den-
bow, D. M. (1992). Effect of early feed restriction
on growth, feed conversion, and mortality in broiler
chickens. Poultry Science, 71(8):1296–1305.
Jaidee, U., Mu˜noz-Avila, H., and Aha, D. W. (2013). Case-
based goal-driven coordination of multiple learning
agents. In International Conference on Case-Based
Reasoning, ICCBR ’13, pages 164–178.
Jiang, S., Zhang, J., and Ong, Y.-S. (2014). A pheromone-
based traffic management model for vehicle re-routing
and traffic light control. In Proceedings of the 2014
International Conference on Autonomous Agents and
Multi-agent Systems, AAMAS ’14, pages 1479–1480.
Leake, D. and McSherry, D. (2005). Introduction to the
special issue on explanation in case-based reasoning.
Artificial Intelligence Review, 24(2):103–108.
Lee, D., Lyu, S., Wang, R., Weng, C., and Chen, B.
(2011). Exhibit differential functions of various an-
tibiotic growth promoters in broiler growth, immune
response and gastrointestinal physiology. Interna-
tional Journal of Poultry Science, 10(3):216–220.
Maes, P. (1995). Artificial life meets entertainment: Life-
like autonomous agents. Communications of the ACM,
38(11):108–114.
Maseleno, A. and Hasan, M. M. (2012). Poultry dis-
eases expert system using dempster-shafer theory and
web mapping. International Journal of Advanced Re-
search in Artificial Intelligence, 1(3):44–48.
McSherry, D. (2014). An algorithm for conversational case-
based reasoning in classification tasks. In Case-Based
Reasoning Research and Development: 22nd Interna-
tional Conference, ICCBR 2014, ICCBR ’14, pages
289–304.
Northcutt, J. K. and Jones, D. R. (2004). A survey of wa-
ter use and common industry practices in commercial
broiler processing facilities. Jounal Applied Poultry
Research, 13(1):48–54.
Ribeiro, R. and Enembreck, F. (2013). A sociologically in-
spired heuristic for optimization algorithms: A case
study on ant systems. Expert Systems With Applica-
tions, 40(5):1814–1826.
Ribeiro, R., Favarim, F., Barbosa, M. A. C., Borges, A. P.,
Dordal, O. B., Koerich, A. L., and Enembreck, F.
(2012). Unified algorithm to improve reinforcement
learning in dynamic environments - an instance-based
approach. In International Conference on Enterprise
Information Systems, ICEIS ’12, pages 229–238.
Ribeiro, R., Ronszcka, A. F., Barbosa, M. A. C., Favarim,
F., and Enembreck, F. (2013). Updating strategies
of policies for coordinating agent swarm in dynamic
environments. In International Conference on Enter-
prise Information Systems, ICEIS ’13, pages 345–356.
ICEIS2015-17thInternationalConferenceonEnterpriseInformationSystems
502

Schmisseur, E. and Pankratz, J. (1989). Xlayer: an expert
system providing management advice to commercial
layer managers. Southern journal of agricultural eco-
nomics, 2(21):183–193.
Shariatmadari, F. (2012). Plans of feeding broiler chickens.
World’s Poultry Science Journal, 68(1):21–30.
Tavarez, M. A., Boler, D. D., Bess, K. N., Zhao, J., Yan,
F., Dilger, A. C., McKeith, F. K., and Killefer, J.
(2011). Effect of antioxidant inclusion and oil quality
on broiler performance, meat quality, and lipid oxida-
tion. Poultry Science, 90(4):922–930.
Teixeira, M., Malik, R., Cury, J., and de Queiroz, M. (2014).
Supervisory control of des with extended finite-state
machines and variable abstraction. Automatic Control,
IEEE Transactions on, 60(1):118–129.
ALearningModelforIntelligentAgentsAppliedtoPoultryFarming
503
