
DIFPL
Distributed Drone Flight Path Builder System
Manu Shukla, Ziqian Chen and Chang-Tien Lu
Virginia Tech, Falls Church, Virginia, U.S.A.
{mashukla, czq, ctlu}@vt.edu
Keywords:
Distributed Systems, Drones, Spatial Computing.
Abstract:
Drones have become ubiquitous in performing risky and labor intensive areal tasks cheaply and safely. To
allow them to be autonomous, their flight plan needs to be pre-built for them. Existing works do not precalcu-
late flight paths but instead focus on navigation through camera based image processing techniques, genetic or
geometric algorithms to guide the drone during flight. That makes flight navigation complex and risky. In this
paper we present automated flight plan builder DIFPL which pre-builds flight plans for drones to survey a large
area. The flight plans are built for subregions and fed into drones which allow them to navigate autonomously.
DIFPL employs distributed paradigm on Hadoop MapReduce framework. Distribution is achieved by process-
ing sections or subregions in parallel. Experiments performed with network and elevation datasets validate the
efficiency of DIFPL in building optimal flight plans.
1 INTRODUCTION
With improvements in technology such as high speed
cameras and sensors drones have not only become
capable of performing varied tasks but also be-
come increasingly autonomous during flight. Drones
have proven very useful in both military battle-
field and civilian tasks. Common civilian tasks for
drones include education(Krajnik et al., 2011), study-
ing natural phenomena(Williams, 2013), reconnais-
sance(Segor et al., 2011) and conservation(Koh and
Wich, 2012) amongst others. Drones can fly manually
through controller or autonomously. If they are con-
trolled manually the cost of operating them increases.
Hence it is preferred to operate them autonomously.
Autonomous flying presents challenges in terrain nav-
igation. Multitude of flight path scenarios such as
variations in altitude and density of objects to survey
need to be handled elegantly. Flight planning has to
account for drone hardware limitations.
The complexity of covering an area with auto-
mated flights increases when there are multiple types
of drones available with different capabilities. For
this work drones can be one of two types as shown
in Figure 1; Conventional drone which performs con-
ventional take off and landing and Quadcopter with
vertical take off and landing. The primary challenge
encountered in building flight path of drones is in op-
timizing the use of different types of drones to cover
Figure 1: Conventional drone and Quadcopter.
the entire region. Each drone type has its specific
limitations. The cost of operating different types of
drones is also varied. The optimization problem then
becomes multi-pronged. Not only should it cover the
entire region with multiple flights of the right drone
type that can navigate varying terrain but also use the
cheaper drone as frequently as possible to minimize
cost. This motivated us to create DIFPL.
DIFPL accounts for terrain scenarios such as net-
work lines length and elevation based climbing an-
gle to optimally divide area into subregions and build
the flight plan for each subregion. It generates a set
of Flight Plans in order to cover the entire power
lines network of aviation organization and minimize
the number of drone flights and overall cost. This is
achieved by optimizing coverage by each flight in a
subregion and assigning to the type of drone needed
for the subregion. Network lines and elevation of
waypoints in each subregion need to satisfy rules that
are represented as autonomy and climbing angle con-
straints. The constraints determine if the subregion
needs to be shrunk or expanded or split between mul-
tiple drone types. Our technique uses sectionwise or
subregion based distribution of network lines process-
17
Shukla M., Chen Z. and Lu C..
DIFPL - Distributed Drone Flight Path Builder System.
DOI: 10.5220/0005378700170026
In Proceedings of the 1st International Conference on Geographical Information Systems Theory, Applications and Management (GISTAM-2015), pages
17-26
ISBN: 978-989-758-099-4
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

ing, linear inequalities, and spatial index to query el-
evation around waypoints. It is powerful as it can au-
tomate flight path building with only terrain data and
pre-known drone hardware limitations. Focus of this
work is on drone flights to take pictures of vegetation
over electricity poles network. Image analysis during
post-processing determines if the vegetation has over-
grown over poles and needs trimming. The applica-
tion can automate flights for many such tasks such as
determine flood damage, deforestation, pollution and
agricultural activities. The volume of terrain and net-
work lines data for large areas increases rapidly. In or-
der to scale to the large terrain and networks datasets,
DIFPL uses distributed paradigm on Hadoop MapRe-
duce framework. The contributions of the paper are:
• Create Subregions within Overall Area Dy-
namically. DIFPL uses a novel way to divide
a large area into subregions that can be covered
with a single flight of a drone. Processing terrain
data by subregion provides flexibility in deciding
which type of drone to assign the subregion.
• Model Terrain Scenarios with Multiple Drone
Types and Their Hardware Limits. This work
combines terrain and network data with drone
flight constraints for multiple drone types applied
as linear inequalities. It maximally exploits capa-
bility of each drone type to determine subregion
size and type of drone to cover it.
• Distribute Flight Plan Creation. Flight plan
construction is distributed with MapReduce
framework. Distribution eliminates any limita-
tions on size of spatial index on a single node with
novel key-value pair based joins and scales hori-
zontally to larger terrains datasets.
• Optimize Subregions After Distributed Pro-
cessing. DIFPL minimizes subregions by merg-
ing as many boundary regions as possible after
creating flight plans for subregions. This requires
aligning incomplete subregions so adjacent ones
can be merged optimizing subregions and its ef-
fectiveness is validated by experiments.
Section 2 explores research related to this work. Sec-
tion 3 presents the preliminary design considerations
of flight plan builder. In Section 4 the MapReduce
framework based DIFPL implementation is described
followed by experiments in Section 5. Conclusions
are presented in Section 6.
2 RELATED WORK
Research similar to this work can be broken into two
categories, previous approaches to automate flight of
drones and distributed platforms for general spatial
data processing and specific to drones.
Automated Flights. Several ways to automate the
flight of drones exist including using sensors(Visse
et al., 2011), camera images(Bills and Saxena, 2011),
feeding their waypoints as a file(Babaei and Mor-
tazavi, 2010) or automating from the control(Lugo
and Zell, 2014). Genetic algorithms have been used
to trace flight paths(De Paula Santos et al., 2013)
along with ant colony algorithms in 3D route plan-
ning(Deng et al., 2013). Optimization algorithms for
multi-objective drone route planning have been ex-
plored(Li et al., 2013).
Distributed Spatial Operations. With increase
in spatial data distributed approaches are increas-
ingly being explored. Spatial data processing using
MapReduce is explored(Cary et al., 2009). Tech-
niques for accelerated processing with MapReduce
have been proposed(Wang et al., 2010). Distributed
spatial operations on Hadoop and SpatialHadoop as
Hadoop extension for spatial operations have been ex-
plored(Eldawy and Mokbel, 2013). Computational
geometry algorithms have been distributed using Spa-
tialHadoop(Eldawy et al., 2013). Distribution of
drone data analysis and multiple drone flight coordi-
nation tasks has begun to gather momentum(Chmaj
and Selvaraj, 2015). Hadoop based platforms that
support spatial queries with MapReduce are pro-
posed(Aji et al., 2013).
As far as we know, Previous works did not con-
sider multiple drone types and variations in terrain to-
gether in automating flight paths. DIFPL does not rely
on images or video to navigate. Flight paths are built
offline with terrain and network lines data and do not
need to be adjusted dynamically as all the constraints
are applied at the time of running the program. Our
distributed technique makes 2 passes on the data us-
ing standard hadoop constructs and avoids building a
large index on a single node by splitting the data into
sections or subregions that can be processed indepen-
dently.
3 PRELIMINARIES
In this section we describe the background informa-
tion to DIFPL including input and output data, con-
straints on the hardware and subregion and waypoint
construction.
3.1 Data
DIFPL uses inputs (x,y) geocoordinate position of
network lines endpoints provided by aviation orga-
GISTAM2015-1stInternationalConferenceonGeographicalInformationSystemsTheory,ApplicationsandManagement
18

Figure 2: Entire network lines area.
nization and elevation data (x,y,elevation) provided
by geographic agency. The elevation points are 25m
apart. Output of the program is a set of flight plans,
each composed of a set of waypoints (x,y,altitude) and
one landing point in KML format to be fed directly
into the drone. A separate output file is written for
each subregion. The overall 7800 KM
2
power lines
network is shown in Figure 2. The elevation points
data is filtered for the region for which network lines
data is available as part of pre-processing. Every net-
work line had to be covered by one of the available
drone types.
3.2 Constraints
The drone characteristics are specific to the type of
drone, such as speed, autonomy, turning radius, max
slope, and flight height. These characteristics were
kept configurable and drone company was given abil-
ity to adjust them easily through configuration files.
Every pole in network lines need to be photographed
at least 4 times. The drone does 2 passes from each
side of the lines, one pass in one direction and another
pass in the other direction. Drone is equipped with
a NEX7 24 Mega pixel camera with 50 mm optical
lens. The images are used to perform 3D image recon-
struction of each pole to determine if vegetation has
overgrown around the pole. Every attempt is made to
maximize the use of conventional drones as they are
cheaper and more plentiful. Primary limitations of the
hardware of drones are:
• Number of Waypoints. The hardware of conven-
tional drone can be programmed with up to 200
waypoints and the quadcopter can be programmed
with 50 waypoints.
• Climbing Angle. Max slope of ascent for conven-
tional drone is 12
◦
while for descent is -16
◦
. For
quadcopter the max slope for ascent is 90
◦
and for
descent is -90
◦
.
• Autonomy. Maximum distance a conventional
drone can fly in single flight is 30KM and a quad-
copter can fly is 3KM.
The constraints on the flight path of drones are mod-
eled as inequalities. The inequalities are applied for
each subregion for the type of drones. The inequali-
ties are defined as follows.
For climbing angle:
Max(c
p
) ≤ C
type
where c
p
is measure of the angle drone has to climb to
fly from one waypoint to next along network line and
is calculated from recommended drone flying altitude
and elevation at the waypoints. The recommended al-
titude for conventional drone is 100m and for quad-
copter is 50m. The maximum weight of the drone can
be 2200g. For the waypoints along the sides of the
network lines, the elevation is calculated by querying
the k nearest neighbor elevation points with a kNN
spatial index query and taking their average and en-
suring it satisfies the climbing angle constraint.
For autonomy:
∑
l
(2 ∗ d
l
+ i
l
) + 3 ∗l ∗ 2 ∗ π ∗ r +t + n ≤ A
type
where d is the distance of each network line, t is the
takeoff distance to get to required elevation over first
network pole with the climbing angle of each drone
type, n is the landing distance with the descent angle
for drone type, i distance between two network lines
and r is the turn distance for the drone type for l lines.
Turning radius of conventional drone is 150m while
that of quadcopter is 0m. The distance i is calculated
by ordering network lines in the subregion by their
x
start
and calculating the distance between one line to
next. Since there are 3 turns for a drone to cover a
line segment twice and proceed to the next line seg-
ment 3 turning circumferences have to be added to
the equation. The requirement of photographing each
pole 4 times is satisfied by setting camera to take an
image a second. The number of waypoints in output is
achieved by collecting waypoints along network lines
every 200m for conventional drone and every 100m
for quadcopter and increasing it if the number of way-
points exceed the maximum.
4 DISTRIBUTED SYSTEM DIFPL
This section describes the distributed system DIFPL
that builds flight plans based on distributed paradigm.
It gives overview of the architecture of the system,
algorithms used and optimized distribution for maxi-
mum parallelization.
DIFPL-DistributedDroneFlightPathBuilderSystem
19

4.1 Architecture
The architecture of DIFPL is based on distributed
paradigm. The distribution approach in DIFPL
was implemented using Apache Hadoop MapReduce
framework.
Hadoop. Hadoop(Apache and Hadoop, 2014) is an
open source framework which facilitates distributed
computations on large clusters. A master node or-
chestrates data storage and computation distribution
over multiple slave nodes. Files are uploaded into
distributed file storage called HDFS, split into 64MB
blocks and then processed. Master node keeps track
of all the blocks of a file and where they are stored.
MapReduce(Dean and Ghemawat, 2008) allows mas-
ter node to break down computation tasks into map-
pers and reducers distributed over slave nodes. They
work on file blocks on slave nodes exploiting coloca-
tion of computation with data. Mappers read in in-
put data as key value pairs <k
1
, v
1
>and emit interme-
diate key value pairs <k
2
, v
2
>. Reducer receive the
intermediate key value pairs grouped by k
2
and pro-
cesses them to generate the final set of key value pairs
<k
3
, v
3
>.
The distribution of flight path builder is necessi-
tated due to memory limitations of indexing large ele-
vation and network datasets on a single node. Several
opportunities for distribution of the flight plan builder
process are available. The identification of quad-
copter subregions and the shrinking of quadcopter and
conventional drone subregions can be performed in
parallel. An overview of the distributed system ar-
chitecture is shown in Figure 3. The distributed ap-
plication runs on a cluster on Amazon Web Services
(AWS). MapReduce jobs are run on AWS Elastic
MapReduce (EMR) and data is read from and written
to S3 buckets similar to HDFS. It uses Hadoop 2.5.1
and MapReduce2. The experiments were performed
on a 5 node Hadoop cluster with 1 master and 4 slave
nodes.
4.2 Algorithms
The algorithms used in DIFPL include a base Build
Flight Plans algorithm that performs queries and ap-
plies constraints on results within a section or subre-
gion. Two levels of distribution are built, one based
on the flight path algorithm and another parallelized
on subregions.
4.2.1 Flight Path Building within Section
Algorithm 1 shows the process of building the flight
paths. The flight plan building is implemented in
3 steps. The builder reads index file from disk if
Figure 3: Distributed System Architecture.
present else reads the network line and elevation data
{network
i
} and {elevation
i
} and inserts them into a
spatial index Si. The builder then starts querying in-
dex with conventional drone default D
c
sized subre-
gions as range queries q
i
. Objects returned in result
set of the query r
i
include network lines and eleva-
tion points inside the subregion. It calculates way-
points along network lines in query and then eleva-
tion of waypoints using kNN query and averaging the
elevation of nearest neighbors. If the network lines l
i
satisfy the conventional drone autonomy constraint A
c
but fail to satisfy the conventional drone climbing an-
gle constraint C
c
, then it queries spatial index for the
subregion using default size of quadcopter D
q
with
queries qq
i
from left to right. Each consecutive quad-
copter size subregion that satisfies the climbing angle
constraint is merged with previous one. Ones that do
not satisfy C
c
are deemed to require quadcopter. If
the length of network lines in r
i
are too large or less
than β% threshold of the autonomy of quadcopter or
conventional drone, then the subregion is shrunk or
expanded iteratively till it satisfies the autonomy con-
straint for the respective drone type. The output for
each subregion O
i
as waypoints and landing point is
written out.
4.2.2 Sectionwise Distribution
The first task of distribution is to split the entire area
into sections and query for subregions in spatial in-
dex built separately for each section. This allows for
building smaller sections in spatial index instead of
the entire area.
The distribution paradigm is broken down into 2
phases, each translating into a pass over the data.
Each pass incrementally identifies subregions for
quadcopter or conventional drone and final pass re-
solves boundary issues and outputs final flight paths
for each subregion.
GISTAM2015-1stInternationalConferenceonGeographicalInformationSystemsTheory,ApplicationsandManagement
20

Algorithm 1: Build Fligh Plans.
Input: {network
i
},{elevation
i
} {network lines and elevation
data}
Output: {subregion
i
,waypoint
i
} {each subregion and way-
points}
1: {step 0: setup index and subregion iterations}
2: if index spatial index file does not exist then
3: Si ← {network
i
,elevation
j
} {create spatial index with
network lines as 2D objects and elevation points}
4: else
5: read Si from disk {read in spatial index from disk}
6: end if
7: ∀ query q
i
for subregions subregion
i
starting from bottom
left of region with size D
c
8: while !at top right of region do
9: regionDone=false
10: r
i
← Si(q
i
) {query Spatial index Si with query q
i
to
generate result set}
11: generate wapypoint
i
in r
i
12: for all waypoint
i
in r
i
do
13: elevation
wi
←
∑
kNN
waypointi
k
14: end for
15: if max C(r
i
) ≤ C
c
then
16: {step 1: Subregion can be covered with conven-
tional drone}
17: {retrieved objects elevations satisfy conventional
drone climbing angle constraint}
18: while
∑
{| l
r
|} does not satisfy A
c
do
19: {retrieved objects network lines do not satisfy
conventional drone autonomy constraints}
20: Si ← q
i
± γ
21: {reduce or expand window size and re-query}
22: end while
23: if
∑
{| l
r
|} satisfies A
c
then
24: {conventional drone constraints satisfied}
25: {waypoint
i
} ← C
q
{create waypoints for conven-
tional drone subregion}
26: write output O
i
27: q
i
→ q
j
{move to next window}
28: end if
29: else
30: {step 2: Subregion needs quadcopter}
31: for all qq
i
∈ q
i
do
32: r
i
← Si(qq
i
)
33: {requery with default quadcopter subregion
sizes}
34: if !maxC(r
i
) ≤ C
c
then
35: {region fails conventional drone climbing an-
gle constraints}
36: {waypoint
i
} ← Q
q
37: {build waypoints for quadcopter}
38: qq
i
→ qq
j
39: {move to next window}
40: else
41: O
i
∪ q
i−1
{merge into previous conventional
subregion}
42: Write Output O
i
43: end if
44: end for
45: end if
46: end while
Assign and Process Section. The first pass labels
network and elevation data with the section they be-
long to. The details are described in Algorithm 2.
The data is processed by two mappers. First map-
per reads network lines data {network
i
} as text and
calculates section id based on the coordinates of the
network line. The key value pair emitted from the
mapper are <sectionID
j
,networkline
l
>. The second
mapper similarly reads elevation data {elevation
j
}
and calculates section id and emits <K,V>pairs
<sectionID
j
,elevation
i
>. The reducer reads the data
and aggregates all elevation and network line obser-
vations for a section id.
Algorithm 2: Assign and Process Section.
Input: {elevation
i
,networkline
i
}
Output: subregion
j
→ {xsr
j
,ysr
j
,xer
j
,yer
j
,
quadcopter|conventional,{network
j
},{elevation
j
},
{waypoint
j
}
1: mapper1:
2: calculate sectionID
j
based on its coordinates
3: emit:sectionID
j
→ elevation
j
4: mapper2:
5: calculate sectionID
j
based on its coordinates
6: emit:sectionID
j
→ networkline
j
7: reducer:
8: for all observations do
9: build section
j
10: end for
11: APPLY Build Flight Plans Algorithm
12: emit:subregion
j
→ {xsr
j
,ysr
j
,xer
j
,yer
j
,
quadcopter|conventional,{network
j
},{elevation
j
},
{waypoint
j
}
Reducer builds spatial index for elevation points
for the subregion with network and elevation data in
memory and marks quadcopter and conventional sub-
region by elevation and length constraints. It shrinks,
expands and merges subregions as needed. The final
emitted <K,V>pairs in the reducer are the details of
each subregion within a section such as subregion id
subregion
j
, the subregion extent xsr
j
,ysr
j
,xer
j
,yer
j
,
a flag indicating if its a quadcopter or conventional
drone subregion, the network lines and elevation
points and waypoints for a quadcopter or conventional
drone to follow along the network lines in the subre-
gion waypoint
k
,...,waypoint
l
.
Resolve Edge Effects. Second pass resolves edge ef-
fects between sections as described in Algorithm 3.
The input to the mapper are the subregions subregion
j
with their extent, the drone type needed, network lines
and elevation points in the subregion and the way-
points. For the subregions that are along the verti-
cal edge of the sections associated with their section
id, reducer pairs the corresponding left and right sub-
regions. The subregions could be merged together if
they are covered by same drone type. The output from
DIFPL-DistributedDroneFlightPathBuilderSystem
21

Algorithm 3: Resolve Edge Effects.
Input: {subregion
j
→ {xsr
j
,ysr
j
,xer
j
,yer
j
,
quadcopter|conventional,{waypoint
j
},{network
j
},
{elevation
j
}}}
Output: subregion
k
→ {xsr
j
,ysr
j
,xer
j
,yer
j
,quadcopter
|conventional, {waypoint
k
}}
1: mapper:
2: emit:“verticalborder|notverticalborder” → subregion
j
,
{xsr
j
,ysr
j
,xer
j
,yer
j
,{network
j
},{elevation
j
}
{waypoint
k
}, }
3: reducer:
4: if border then
5: if subregion
i
&& subregion
j
are adjacent then
6: if they can be merged with combined subregion
network length <β% then
7: merge subregions
8: emit:subregion
k
→ {xsr
k
,ysr
k
,xer
k
,yer
k
,
quadcopter|conventional,{waypoint
k
}}
9: else
10: emit:subregion
i
→ {xsr
i
,ysr
i
,xer
i
,yer
i
,
quadcopter|conventional,{waypoint
i
}}
11: emit:subregion
j
→ {xsr
j
,ysr
j
,xer
j
,yer
j
,
quadcopter|conventional,{waypoint
j
}}
12: end if
13: end if
14: else
15: emit:subregion
j
→ {xsr
j
,ysr
j
,xer
j
,yer
j
,
quadcopter|conventional,{waypoint
j
}}
16: end if
the reducer are the entire set of subregions that in-
clude merged subregions. All non boundary subre-
gions are emitted as is.
4.3 Optimized Distribution
A more scalable approach which precludes need to
build spatial indexes in each reducer in order to build
waypoints in a subregion is now discussed with net-
work lines passed in raw form and elevations inserted
in spatial index.
Assign and Process Subregion. This algorithm
receives as input network and elevation data as
{elevation
i
},{networkline
i
} and in mapper emits
them with the key subregion
j
. Mapper emitted pairs
subregion
j
,networkline
j
and subregion
j
, elevation
j
then result in network lines and elevation points land-
ing together in the reducer. In reducer the waypoints
are built along the network lines and climbing angle
constraint C
c
checked by querying elevation points
from subregion near waypoint from spatial index us-
ing kNN query. It then emits all subregions with way-
points and a flag indicating if they are complete or
incomplete. The details are shown in Algorithm 4.
If the autonomy constraint is not satisfied such that
the network lines are too long or less than threshold
β% of the drone type autonomy, then we mark the
subregion at the time of emission from reducer as
Algorithm 4: Assign and Process Subregions.
Input: {elevation
i
,networkline
i
}
Output: subregion
j
→ xsr
j
, ysr
j
, xer
j
, yer
j
, {waypoint
j
},
quadcopter |conventional, complete |incomplete,
{elevation
j
},{networkline
j
}
1: mapper1:
2: emit:subregion
j
→ elevation
j
3: mapper2:
4: emit:subregion
j
→ networkline
j
5: reducer:
6: index {elevation
i
} in spatial index
7: for all observations calculate waypoints
j
based on its
network lines do
8: for all waypoint
i
calculate elevation with kNN query
do
9: compute climbing angles and check if they satisfy
constraint C
c
10: if climbing angle fails constraint then
11: split subregion into quadcopter subregions
12: progressively apply C
c
on each subregion of
size D
q
13: if satisfied then
14: if autonomy constraint A
c
satisfied then
15: merge with previous if autonomy con-
straint satisfied
16: else
17: mark as quadcopter
18: end if
19: end if
20: emit:subregion
j
→ xsr
j
, ysr
j
, xer
j
, yer
j
,
{waypoint
j
}, quadcopter
|conventional, complete |incomplete,
{elevation
j
},{networkline
j
}
21: else if autonomy constraint A
c
not satisfied then
22: shrink subregion
j
23: emit:subregion
j
→ xsr
j
, ysr
j
, xer
j
, yer
j
,
{waypoint
j
}, quadcopter
|conventional, complete |incomplete,
{elevation
j
},{networkline
j
}
24: end if
25: end for
26: end for
incomplete. The task then becomes to merge the ad-
jacent incomplete subregions.
Reconcile Adjacent Subregions. Subregions in
sparse area that need to be expanded, or ones gen-
erated after shrinking dense subregion are emitted as
incomplete. All subregions that are split result in a
set of quadcopter and conventional drone subregions.
The ones that are not able to satisfy the autonomy β%
constraint are also emitted by reducer as incomplete
to merge with adjacent incomplete subregions. The
details are shown in Algorithm 5. The algorithm ac-
cepts all subregions and mapper emits ones that are
incomplete. The reducer then aligns the ones that are
adjacent. It then checks if the adjacent subregions can
be merged together. Every time a merged subregion
satisfies β% threshold and autonomy constraint
GISTAM2015-1stInternationalConferenceonGeographicalInformationSystemsTheory,ApplicationsandManagement
22

Algorithm 5: Reconcile Adjacent Subregions.
Input: subregion
j
→ xsr
j
, ysr
j
, xer
j
, yer
j
,
{waypoint
j
}, quadcopter |conventional, complete
|incomplete,{elevation
j
},{networkline
j
}
Output: subregion
i
,xer
i
, yer
i
, xsr
i
, xsr
i
,{waypoint
i
}, con-
ventional|quadcopter
1: mapper:
2: emit:“incomplete” → subregion
i
,xer
i
, yer
i
, xsr
i
, xsr
i
,
{elevation
i
},{networkline
i
},incomplete,{waypoint
i
},
conventional|quadcopter
3: emit:subregion
j
→ xer
i
, yer
i
, xsr
i
, xsr
i
,
{elevation
i
},{networkline
i
},complete,{waypoint
i
},
conventional|quadcopter
4: reducer:
5: for all incomplete subregions calculate new subregions
based on its coordinates do
6: if subregion
i
&& subregion
j
are adjacent then
7: if they can be merged with combined subregion
network length <β% then
8: merge subregions
9: emit:subregion
k
→ {xsr
k
,ysr
k
,xer
k
,yer
k
,
quadcopter|conventional,{waypoint
k
}}
10: else
11: emit:subregion
i
→ {xsr
i
,ysr
i
,xer
i
,yer
i
,
quadcopter|conventional,{waypoint
i
}}
12: emit:subregion
j
→ {xsr
j
,ysr
j
,xer
j
,yer
j
,
quadcopter|conventional,{waypoint
j
}}
13: end if
14: end if
15: for all complete subregions do
16: emit:subregion
i
→ {xsr
i
,ysr
i
,xer
i
,yer
i
,
quadcopter|conventional,{waypoint
k
}}
17: end for
18: end for
it emits it in reducer as subregion
i
→ {xsr
i
, ysr
i
,
xer
i
, yer
i
,{waypoint
i
},quadcopter|conventional} and
proceeds to the next.
5 EXPERIMENTS
This section explores the scenarios to determine a
subregion and the type of drone flights to cover it. The
scenarios can be divided into 3 categories. They can
be within a section including the entire area on a sin-
gle node or distributed by subregion.
5.1 Scenarios within a Single Section
These scenarios occur when applying queries and
constraints within a single section which can either
be the whole area or a section.
Use of Conventional Drone. A typical flight path
as built by Flight Plan Builder is shown in Figure 4.
The waypoints for the subregion are highlighted along
with the electric pole network lines they have to cover
which are shown in red. The distance δ of waypoints
Figure 4: Waypoints along network lines δ distance from
line for subregion covered by conventional drone.
Figure 5: Subregion with network lines length below
threshold of conventional drone autonomy and expanded.
path from the network line is constant and config-
urable. The turning radius of drone along with flight
from one network line to another is taken into account
in the autonomy constraint but not shown in figure
or entered as waypoint as drone automatically deter-
mines how it will navigate from one point to next. The
circles represent the turns conventional drone has to
make to fly on both sides of a network line.
Expanding Subregion for Conventional Drone or
Quadcopter. Figure 5 shows the subregion which has
network lines less than β% autonomy of a conven-
tional drone. The size of the subregion is incremen-
tally expanded by length γ until autonomy reaches β%
of constraint or higher. This parameter is kept config-
urable and defaults to 80%. The dotted lines in figure
represent the incremental expanding of subregion.
Splitting Subregion between Conventional Drone
and Quadcopter Flights. If a subregion fails to sat-
isfy the climbing angle constraint for a conventional
drone it is split to cover segments where constraint
fails with a quadcopter. Figure 6 shows the flight path
waypoints for a subregion that can not be covered
by a conventional drone and requiring a quadcopter.
A larger subregion with this split is shown in Fig-
ure 7. Quadcopter default size subregions are incre-
DIFPL-DistributedDroneFlightPathBuilderSystem
23

Figure 6: Waypoints along network lines δ distance from
line for subregion covered by quadcopter.
Figure 7: Subregion that fails to satisfy climbing angle con-
straint and split between conventional drone in blue and
quadcopter in red.
mentally applied to determine where the conventional
drone climbing angle constraint fails. If that subre-
gion lies in the middle of the original subregion, it is
covered with quadcopter and all the other subregions
before it are assigned to minimal number of conven-
tional drone flights. Subregions after the last quad-
copter segment are merged with the subsequent con-
ventional drone subregion indicated by dotted line.
Only one subregion which required quadcopter cov-
erage was found so after that subregion algorithm re-
sumes querying with default conventional drone sub-
region size. The quadcopter default sized subregions
before the quadcopter assigned subregion are merged
together into one conventional drone subregion.
Shrinking Subregion for Conventional Drone or
Quadcopter. Subregions which has network lines too
long for a conventional drone or quadcopter to cover
in one flight necessitates shrinking of subregion. Fig-
ure 8 shows incrementally shrinking of subregion by
horizontal length γ until a size that satisfies the dis-
tance constraint for conventional drone is reached.
The shrinking reduces the length of network lines un-
til it can be covered by a conventional drone. The
querying then resumes from the end of shrunk subre-
gion. The dotted lines represent incrementally shrunk
subregions.
After experimenting with several default subre-
Figure 8: Subregion with network lines too long for con-
ventional drone autonomy and needs to be shrunk.
Figure 9: All the subregions in overall area shown in blue
for conventional drone and red for quadcopter.
gion sizes for both types of drones starting default
subregion sizes of 3.7KMx2.9KM for conventional
drone and 3.7KMx0.29KM for quadcopter serve as
good default sizes. The defaults are optimal size to
utilize the autonomy of the conventional drones and
quadcopter and minimize processing time. Figure 9
shows the subregions in the overall area with some
subregions covered by conventional drone and some
by quadcopter and some subregions being shrunk for
conventional drone and some split for quadcopter and
the remaining segment covered in the following sub-
region. The subregions in the figure match well the
network lines and their density shown in Figure 2.
Dense network lines areas have more default size and
shrunk conventional drone subregions. Larger num-
ber of quadcopter subregions indicate altitude varia-
tions. Sparse network line areas has larger number of
expanded conventional drone subregions.
The optimizations allow for far fewer drone sub-
regions overall and minimized number of quadcopter
flights which is the goal as conventional drone are
cheaper and more plentiful. The incremental opti-
mizations impact is shown in Figure 10. The incre-
mental savings with expansions and splitting of con-
GISTAM2015-1stInternationalConferenceonGeographicalInformationSystemsTheory,ApplicationsandManagement
24
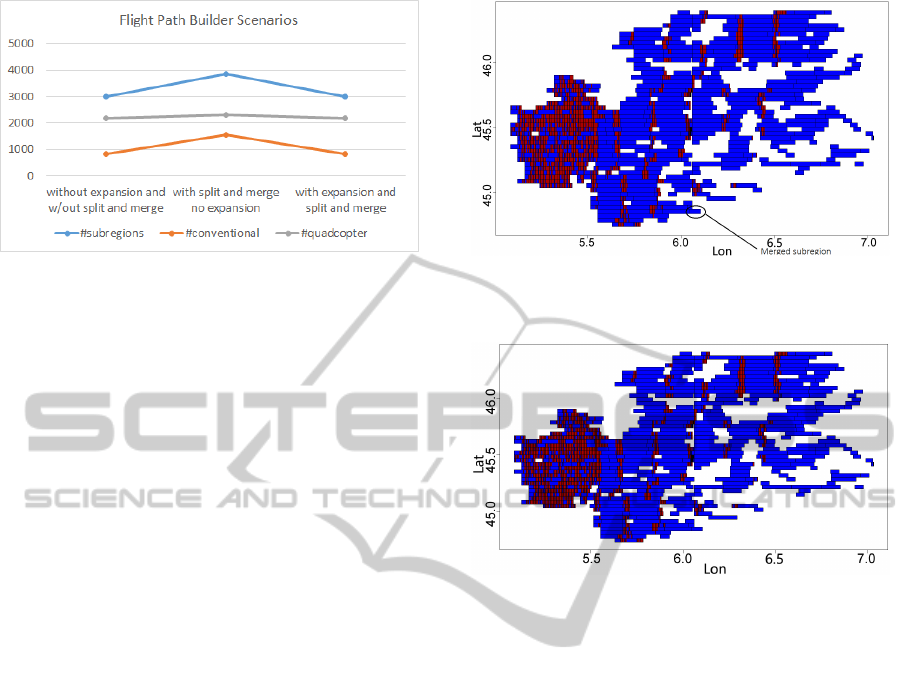
Figure 10: All the subregions for conventional drone and
for quadcopter broken down by the analysis type.
ventional default sized subregions into minimal num-
ber of quadcopter and conventional drone subregions
is very effective in minimizing subregions, in partic-
ular quadcopter subregions. The bulk of efficiency
comes from expanding subregions reducing the num-
ber of conventional drone subregions from 1553 to
809. The splitting of a conventional drone subregion
into pinpoint quadcopter and efficiently merged con-
ventional drone subregions minimizes the number of
quadcopter subregions.
5.2 Distributed Scenarios
In distributed paradigm, the scenarios change as sub-
regions on the edges of sections can not expand which
as then resolved in an additional step.
Shrink, Expand, Merge or Split Subregions. The
subregions are shrunk and expanded based on the
same threshold β% of autonomy as used in sequen-
tial algorithm for each section. This invariably means
several subregions on the right edge of each section do
not get to meet the threshold as they run out of room
to expand. This issue is mitigated to some extent by
the edge effect job.
Merge Section Edge Subregions. Edge subregions
for each section are merged together if feasible. The
result after merging in a 4-section distribution are
shown in Figure 11. If the subregions are being cov-
ered by the same drone type on either side of an edge
and they have not been expanded they are likely to be
merged together. Experiments find 4 such subregions.
5.3 Optimized Distributed Scenarios
Optimized distribution focuses on processing each
subregion in parallel. The subregions are then rec-
onciled by merging with adjacent subregions.
Splitting or Shrinking Subregion. Since a subre-
gion by itself can not be expanded, it can only be
Figure 11: All the subregions in overall area shown in blue
for conventional drone and red for quadcopter after merging
subregions across the vertical section boundaries.
Figure 12: All the subregions in overall area shown in blue
for conventional drone and red for quadcopter after subre-
gionwise distributed processing and merge.
shrunk if its network lines length exceeds the auton-
omy of a conventional drone or quadcopter. We mark
the subregions that do not satisfy the β% network line
length constraint after splitting or shrinking as incom-
plete. Subegions that satisfy the length constraint are
emitted as complete.
Merging Subregions. All incomplete subregions are
then ordered and adjacent ones that can be merged
together are emitted as new subregions. Figure 12
shows the subregions created by the subregion par-
allelization. The entire set of subregions that can be
processed together are merged if possible in a single
pass.
Running the scenarios in the distributed paradigm
produces results that are similar to the sequential pro-
cessing results in terms of number of subregions of
quadcopter or conventional drone type. Merging re-
duces quadcopter subregions by 627 and conventional
subregions by 385.
Comparisons of single node run with distributed
and optimized distributed results are shown in Figure
13. It clearly shows the impact of merge on reducing
the count of quadcopter and conventional drone sub-
regions in optimized distribution. After merge there
are 1239 conventional drone subregions and 1839
DIFPL-DistributedDroneFlightPathBuilderSystem
25

Figure 13: All the subregions for conventional drone and
for quadcopter broken down by the analysis type.
quadcopter subregions which compares well with 809
conventional drone subregions and 2181 quadcopter
subregions in single node execution.
6 CONCLUSIONS
DIFPL uses a novel approach to flexibly divide a large
area into subregions and dynamically adjust them to
optimally cover with a single drone flight. It combines
spatial data and drone limitations or constraints mod-
eled as linear inequalities to automate flight path of
drones. The distributed implementation presents way
to handle large datasets which can not be processed on
a single node. The subregion level distribution allows
horizontal scalability. The flight plans produced by
distributed version are similar in numbers to the ones
by single node implementation but generated more ef-
ficiently. The technique used is not only useful for the
task of surveying power lines but extensible to a host
of other drone applications.
REFERENCES
Aji, A., Wang, F., Vo, H., Lee, R., Liu, Q., Zhang, X., and
Saltz, J. (2013). Hadoop gis: A high performance spa-
tial data warehousing system over mapreduce. Proc.
VLDB Endow., 6(11):1009–1020.
Apache and Hadoop (2014). http://hadoop.apache.org.
Apache Hadoop.
Babaei, A. R. and Mortazavi, M. (2010). Three-dimensional
curvature-constrained trajectory planning based on in-
flight waypoints. Journal of Aircraft.
Bills, C.and Chen, J. and Saxena, A. (2011). Autonomous
mav flight in indoor environments using single image
perspective cues. In Robotics and Automation (ICRA),
2011 IEEE International Conference on.
Cary, A., Sun, Z., Hristidis, V., and Rishe, N. (2009). Ex-
periences on processing spatial data with mapreduce.
In Proceedings of the 21st International Conference
on Scientific and Statistical Database Management,
SSDBM 2009, pages 302–319, Berlin, Heidelberg.
Springer-Verlag.
Chmaj, G. and Selvaraj, H. (2015). Distributed process-
ing applications for uav/drones: A survey. In Sel-
varaj, H., Zydek, D., and Chmaj, G., editors, Progress
in Systems Engineering, volume 1089 of Advances in
Intelligent Systems and Computing, pages 449–454.
Springer International Publishing.
De Paula Santos, G., Garcia Marques, L., Miranda Neto,
M., Cardoso, A., Lamounier, E., and Yamanaka, K.
(2013). Development of a genetic algorithm to im-
prove a uav route tracer applied to a man-in-the-loop
flight simulator. In Virtual and Augmented Reality
(SVR), 2013 XV Symposium on, pages 284–287.
Dean, J. and Ghemawat, S. (2008). Mapreduce: Simpli-
fied data processing on large clusters. Commun. ACM,
51(1):107–113.
Deng, T., Xiong, Z. M., and Meng, Y. J. L. Q. Z. (2013).
Research on 3d route planning for uav in low-altitude
penetration based on improved ant colony algorithm.
Applied Mechanics and Materials, 442:556–561.
Eldawy, A., Li, Y., Mokbel, M. F., and Janardan, R. (2013).
Cg hadoop: Computational geometry in mapreduce.
In ACM SIGSPATIAL, pages 294–303.
Eldawy, A. and Mokbel, M. F. (2013). A demonstration of
spatialhadoop: An efficient mapreduce framework for
spatial data. Proc. VLDB Endow., 6(12):1230–1233.
Koh, L. P. and Wich, S. A. (2012). Dawn of drone ecology:
lowcost autonomous aerial vehicles for conservation.
Tropical Conservation Science, 5(2):121–132.
Krajnik, T., Vonasek, V., Fiser, D., and Faigl, J. (2011). AR
drone as a platform for robotic research and educa-
tion. Communications in Computer and Information
Science, 161:172–186.
Li, L., Liu, X., Peng, Z.-R., and Xu, X. (2013). Multi-
objective optimization model and evolutionary algo-
rithm to plan uav cruise route for road traffic surveil-
lance. In Transportation Research Board 92nd Annual
Meeting.
Lugo, J. J. and Zell, A. (2014). Framework for autonomous
onboard navigation with the ar.drone. Journal of In-
telligent and Robotic Systems, 73(1-4):401–412.
Segor, F., B
¨
urkle, A., Kollmann, M., and Sch
¨
onbein, R.
(2011). Instantaneous autonomous aerial reconnais-
sance for civil applications. In ICONS 2011, The Sixth
International Conference on Systems, St. Maarten,
The Netherlands Antilles.
Visse, A., Dijkshoorn, N., van der Veen, M., and Jurri-
aans, R. (2011). Closing the gap between simula-
tion and reality in the sensor and motion models of
an autonomous ar.drone. In Proceedings of the Inter-
national Micro Air Vehicles conference.
Wang, K., Han, J., Tu, B., Dai, J., Zhou, W., and Song,
X. (2010). Accelerating spatial data processing with
mapreduce. In Proceedings of the 2010 IEEE 16th
International Conference on Parallel and Distributed
Systems, ICPADS ’10, pages 229–236, Washington,
DC, USA. IEEE Computer Society.
Williams, S. C. P. (2013). Studying volcanic eruptions with
aerial drones. In Proc Natl Acad Sci U S A.
GISTAM2015-1stInternationalConferenceonGeographicalInformationSystemsTheory,ApplicationsandManagement
26
