
An Efficient and Topologically Correct Map Generalization Heuristic
Maur
´
ıcio G. Gruppi
1
, Salles V. G. de Magalh
˜
aes
1
, Marcus V. A. Andrade
1
, W. Randolph Franklin
2
and Wenli Li
2
1
Departamento de Inform
´
atica, Universidade Federal de Vic¸osa, Campus da UFV, Vic¸osa, Brazil
2
Electrical, Computer, and Systems Engineering Department, Rensselaer Polytechnic Institute, 110 8th ST, Troy, U.S.A.
Keywords:
Map Generalization, Computational Geometry, Line Simplification, Geographic Information Systems.
Abstract:
We present TopoVW, an efficient heuristic for map simplification that deals with a variation of the generaliza-
tion problem where the idea is to simplify the polylines of a map without changing the topological relationships
between these polylines or between the lines and control points. This process is important for maintaining clar-
ity of cartographic data, avoiding situations such as high density of map features, inappropriate intersections.
In practice, high density of features may be represented by cities condensed into a small space on the map,
inappropriate intersections may produce intersections between roads, rivers, and buildings. TopoVW is a
strategy based on the Visvalingam-Whyatt algorithm to create simplified geometries with shapes similar to
the original map, preserving topological consistency between features in the output. It uses a point ranking
strategy, in which line points are ranked by their effective area, a metric that determines the impact a point
will cause to the geometry if removed from the line. Points with inferior effective area are eliminated from the
original line. The method was able to process a map with 4 million line points and 10 million control points
in less than 2 minutes on a Intel
R
Core
TM
2 Duo processor.
1 INTRODUCTION
Map generalization, or cartographic generalization, is
a process that aims to simplify the way cartographic
data is represented by removing information that is
not relevant to the viewer, while preserving crucial
features on the map. Generalization is an innate trait
of every geographical data, maps are generalized rep-
resentations of reality, and the more generalized is a
map, the more remote it becomes from the real world
(Jo
˜
ao, 1998). The output of this process is a map with
less complex data and more desirable properties than
those from the original map. The biggest concern in
this process is to find the balance between simplifica-
tion and actuality .
Although generalization is a task that has been
effortlessly done by humans, it is still hard to auto-
mate. One of the main reasons is that information
may change during varying of scale, and relation-
ships between features in the map have to be main-
tained. Another reason is that “a map is a complex
mix of metric and topological patterns reflecting in-
dividual and interdependent gestaltic properties. Un-
derstanding these forms, and conveying salient char-
acteristics requires both cartographic and geographic
knowledge” (Mackaness et al., 2011, p.7).
Ideally, situations requiring generalization occur
due to failure of the map to meet its goals, that is,
during the simplification process, the map is unsuc-
cessful in preserving clarity of the content, at a given
scale, for the intended viewer (Shea and McMaster,
1989). Some conditions that occur due to scale re-
duction may determine the need of generalization on
a map, such as high feature density and impercepti-
bility, when a feature may be invisible, enlarged, or
converted to the appearance of a different feature, for
instance, when a polygon is condensed so much it ac-
quires the shape of a line or a point.
1.1 Topological Consistency
Preserving consistency of data is crucial on both digi-
tal and analogue cartography. As result of generaliza-
tion processes, both geometries and topological rela-
tionships of map features are expected to be changed
(Ruas and Lagrange, 1995). This is undesirable since
it may result in inappropriate maps, containing incon-
sistent relationship between features, such as roads
(lines) intersecting buildings (polygons, for instance),
buildings intersecting other buildings, or overlap be-
516
G. Gruppi M., V. G. de Magalhães S., V. A. Andrade M., Randolph Franklin W. and Li W..
An Efficient and Topologically Correct Map Generalization Heuristic.
DOI: 10.5220/0005398105160525
In Proceedings of the 17th International Conference on Enterprise Information Systems (ICEIS-2015), pages 516-525
ISBN: 978-989-758-096-3
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

tween rivers and buildings. Therefore, simplifications
algorithms must handle such situations, if they occur.
Sidedness is another aspect to be preserved. Main-
taining sidedness means that, after the process of gen-
eralization, features which were simplified will not be
on a different side of other features (such as control
points).
1.2 Polyline Simplification
One way to perform cartographic generalization is by
applying polyline simplification to reduce the com-
plexity of such features in a map. A polyline is a
series of line segments defined by a sequence of n
points (v
1
, v
2
, ..., v
n
) called vertices, each two neigh-
bouring segments in the series share a common end-
point, namely, a polyline describes a curve starting
on a point v
1
, passing through every vertex on the se-
quence until v
n
. Figure 1 shows an example input con-
taining three polylines L
1
, L
2
and L
3
, and also a fea-
ture point P. To apply generalization to a polyline im-
plies to simplify its representation by removing points
from its sequence, that is, to attempt to represent the
same curve with fewer vertices, the process of sim-
plification is illustrated by Figure 2. This, however,
can cause inconsistencies of topological relationships
between polylines and points. For instance, apply-
ing simplification on a county dataset may change its
boundaries in such a way that a point representing a
city may fall in the wrong county, i.e., during the pro-
cess of simplification it was not taken into considera-
tion that it was mandatory for the point representing
the city to be inside the county polygon by the end
of the generalization, that is, sidedness was not kept.
Moreover, polyline simplifications can create inap-
propriate intersections between polylines as shown by
Figure 3. Among the most well-known algorithms
for performing polyline simplification are Douglas-
Peucker, also known as Ramer-Douglas-Peucker (or
RDP) (Douglas and Peucker, 1973; Ramer, 1972)
and Visvalingam-Whyatt (Visvalingam and Whyatt,
1993).
In this paper is presented a solution for the fol-
lowing variation of the generalization problem: given
a set of polylines and control points, the goal is to
simplify these polylines by removing some of their
vertices (except endpoints) such that topological re-
lationships between pairs of polylines and between
polylines and control points are kept. In practice,
polylines may represent boundaries of counties or
states, and control points may represent cities within
these states. As indicated by Estkowski et al. (Es-
tkowski and Mitchell, 2001), this problem is difficult
to solve, even approximately. This paper presents an
Figure 1: Example input of three polylines L
1
, L
2
and L
3
,
and a control point P.
Figure 2: Example of valid simplification output, note that
topology consistency is preserved, no intersections were
created and sidedness is maintained.
extension of the line simplification method Grid-Gen
(Magalh
˜
aes et al., 2014) , in which a new heuris-
tic based on Visvalingam-Whyatt algorithm (Vis-
valingam and Whyatt, 1993) is included. The method
uses a strategy of point ranking to determine the best
points to be kept in the output line. Polyline points are
ranked by its effective area, namely the area generated
by a point and its neighbours, then a cut-off factor
is applied for eliminating points from the ranked list,
points with lower effective area values will produce
less area displacement when eliminated from the line,
thus causing less impact to the topology of the output.
2 RELATED WORKS
One alternative for performing map generalization
uses a stochastic optimization technique (Ware et al.,
2003). It carries out operations such as displacement,
size exaggeration, deletion and size reduction in or-
der to resolve conflicts that result from map scale re-
duction. It uses a trial position approach, for each of
n discrete polygonal objects is assigned k candidate
trial positions that represent the original, displaced,
size exaggerated, deleted and size reduced states of
the object, which results in a total of k
n
distinct map
configurations. It is expected that some of these con-
AnEfficientandTopologicallyCorrectMapGeneralizationHeuristic
517

(a)
(b)
Figure 3: (a) Invalid simplification output, feature point P
is placed in the wrong side of line L
2
after the process. ; (b)
Intersection created between lines L
1
and L
2
. Note that this
intersection did not exist prior to the simplification, there-
fore it is inappropriate.
figurations will retain decreased level of map conflict.
The goal is then to find the configuration with the low-
est level of graphic conflict, which could be done by
an exhaustive search, however, in practical situations
this is not viable, i.e., for realistic values of n and k,
an exhaustive search cannot provide a solution in effi-
cient time. The method utilizes a simulated anneal-
ing strategy (Kirkpatrick et al., 1983) to overcome
the exhaustive search issues. The algorithm has been
successful in reducing map conflict within reasonable
time. Nevertheless, since it makes use of a limited
number of k pre-defined trial positions, it may pro-
vide inappropriate solutions (Ware et al., 2003).
Ramer-Douglas-Peucker’s algorithm has the issue
of outputting polylines with inconsistent or incorrect
topological relationships. An approach proposed by
Saalfeld to polyline simplification using the Douglas-
Peucker algorithm attempts to solve this problem by
adding tests to the stopping conditions of the origi-
nal method which guarantee the consistency and cor-
rectness of the resulting features (Saalfeld, 1999).
Its main idea is to generate polylines with Douglas-
Peucker and try to refine it by adding points to the
resulting curve (polyline) such that the curve does not
present any topological inconsistency, notice, how-
ever, that adding points to the curve may erase pre-
vious topological inconsistency and create new ones.
It is also proved that the search for points to be added
to the polyline can be restricted to just a part of the
segment (Saalfeld, 1999).
Although the previous method handles topologi-
cal inconsistencies generated by the Douglas-Peucker
algorithm it does not consider two topological config-
urations that may be undesirable: coincidence topol-
ogy, which consists of the overlapping of two poly-
lines or the overlapping of a feature point and a poly-
line, and the incidence topology, which concerns the
incidence of a polyline point on another polyline p,
but not on a vertex of p. Coincidence and inci-
dence topologies are unwanted because they can gen-
erate redundancies on a map, such as slivers and gaps
(Da Silva and Wu, 2005). A method to handle these
configurations work as an expansion of Saalfeld’s
method, by determining essential vertices and adding
a proximity criterion to the simplification process, the
method eliminates coincidence and incidence from
the results.
Another Douglas-Peucker based approach pro-
posed by Li et al. (Li et al., 2013) intends to avoid
topological inconsistencies as well as cracks on poly-
gon shapes. Its strategy is based on detection-point
identification, which are points lying within a mini-
mum boundary rectangle (MBR) of the bounded face
formed by a subpolyline and its corresponding sim-
plifying segment. These detection-points are used for
consistency verification of the simplification process.
The detection-point identification process starts by
getting the MBR M
i, j
, of the bounded face formed by
point P
i, j
and its corresponding simplifying line seg-
ment e
i, j
. The next step is to identify features whose
MBRs intersect M
i, j
, then, from vertices of the ex-
terior and interior boundaries of such features, iden-
tify those lying within M
i, j
and add such vertices to
an output detection-point set R. And improvement to
this process is made to avoid unnecessary points aris-
ing due to shared edges, that is, edges that belong to
more than one line. However, the problem of poly-
line simplification does not generate cracks, since it
works with multiple polygonal chains, and not with
polygons which contain shared edges, therefore, the
proposed method does not have to handle these par-
ticular situations.
A method proposed by Estkowski and Mitchell
(Estkowski and Mitchell, 2001) performs map sim-
plification of polygonal subdivisions by using a de-
tour heuristic to prevent intersections of lines, which
can result from another simplification method, such as
Douglas-Peucker. It first calculates the simplification
of an input S using the Douglas-Peucker algorithm,
then it calculates all pairs of intersecting lines plac-
ing them in a separate list L. Thereafter, given two
ICEIS2015-17thInternationalConferenceonEnterpriseInformationSystems
518

intersecting lines s and s
0
in the list L, each described
by a pair of endpoints v
1
, v
2
and v
0
1
, v
0
2
respectively,
the idea is to search a graph, called detour graph, for
a shortest path connecting the endpoints of s (or s
0
).
If this path exists, the vertices are added to the origi-
nal line in order to eliminate the intersection. Other-
wise, it carries out a splitting process which consists
of choosing a random vertex u and separating line s
into two segments v
1
u and uv
2
, this is repeated until a
solution is found within a certain error bound.
3 THE PROPOSED METHOD
3.1 The Grid-Gen Heuristic
Given a set of control points C and an input map
M composed of a set P of polylines, the heuristic
simplifies M by iteractively processing each poly-
line independently. When a polyline is processed,
Grid-Gen (Magalh
˜
aes et al., 2014) iterates through
all its interior points v
i
(that is, the points excluding
the endpoints) and removes v
i
if this deletion would
not change the topological relationships between the
map’s elements. This process is repeated until the
number of points in the simplified map reaches a tar-
get value defined by the user or until the map cannot
be further simplified without changing its topology.
To determine if the deletion of a polyline point v
i
would change the map topology, Grid-Gen verifies if
there is any control point or polyline point inside the
triangle t whose vertices are v
i
and its two adjacent
points (i.e., v
i−1
and v
i+1
).
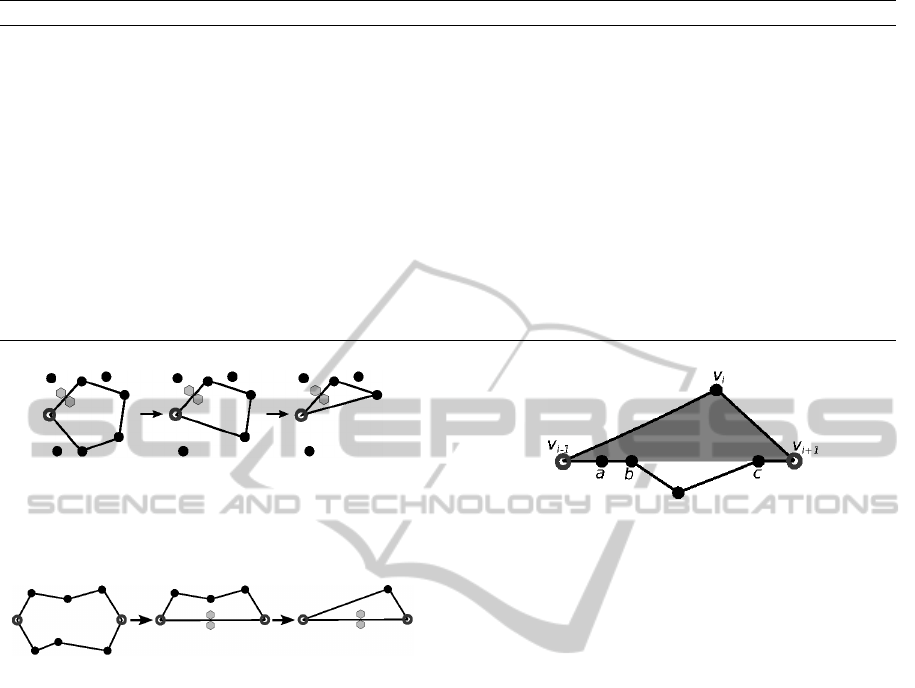
Figure 4 presents an example of the possible topo-
logical changes that may happen during the deletion
of points. Notice that there is a control point x inside
the triangle formed by polyline point a and its two ad-
jacent points. If a polyline is simplified by removing
a, then the topological relationship between the curve
and x will change. Point b also cannot be removed
since polyline point y is inside the triangle containing
b as vertex and, thus, the deletion of b would change
the topological relation between b’s polyline and y’s
polyline (the two polylines would cross if b was re-
moved). Therefore, neither a nor b could be removed
from the current map. On the other hand, point c can
be removed from the map without changing its topol-
ogy since there is no control or polyline point inside
the triangle generated by vertex c.
Algorithm 1 shows a pseudo-code for the method.
Notice that, if no point is removed during one itera-
tion, in the successive iterations no point will be re-
moved either, because the map in the next iteration
Figure 4: Determining if the deletion of some points would
change the map topology.
will not differ from the map in the previous one, there-
fore, the method can be terminated.
In some situations, Algorithm 1 may create maps
with invalid topology. If a polyline p has coincident
endpoints and the polygon (or island) defined by this
polyline does not contain any control points or poly-
lines in its interior, then applying Algorithm 1 may
remove all points from p, thus, creating an invalid
polygon.
Figure 5: Simplification of a polyline with coincident end-
points and no control points or other polyline in the interior
of the polygon that it defines.
In addition, if two polylines p
1
and p
2
have coin-
cident endpoints, and the polygon generated by them
does not contain control points or polylines in its inte-
rior, Algorithm 1 may remove all interior points from
p
1
and p
2
, creating two coincident line segments, as
shown by Figure 6.
Figure 6: Simplification of two polylines with coincident
endpoints and no control points or polylines in the interior
of the polygon defined by them.
To solve these two problems, Grid-Gen prepro-
cess the input adding dummy control points that en-
sure that the heuristic would never simplify the poly-
lines to an invalid state. If a polyline p has coincident
endpoints, two dummy control points are added at an
infinitesimal distance around one of the line segments
that forms p. See an example in Figure 7. This en-
sures that one of these control points will be always
in the interior of the polygon defined by p and, there-
fore, the heuristic will never remove all interior points
AnEfficientandTopologicallyCorrectMapGeneralizationHeuristic
519
Algorithm 1: Pseudo-code for the Grid-Gen algorithm.
1: np2rem ← Number of points to remove
2: npar ← 0 //Number of points already removed from the map
3: while npar < np2rem do
4: for each polyline L in the input map do
5: for each interior point v
i
of L do
6: if colinear(v
i−1
, v
i
, v
i+1
) OR 6 ∃ polyline point/control point in a triangle v
i−1
, v
i
, v
i+1
then
7: npar ← npar + 1
8: Remove v
i
from L
9: if npar > np2rem then Stop the algorithm
10: end if
11: end if
12: end for
13: end for
14: end while
Figure 7: Use of dummy points (hexagon in orange) to
avoid invalid simplifications: note that, in this dataset, the
process terminates after removing the second interior point
of the polyline since a dummy control point is inside the
triangle defined by the resulting polyline.
Figure 8: Use of dummy control points (hexagon in orange)
to avoid invalid simplifications.
of p. By using this strategy, Algorithm 1 will never
generate invalid simplifications as it would in changes
in the topological relationships between the polylines
and the dummy points.
If an input polyline p has only two points, Grid-
Genalso adds two dummy control points in an in-
finitesimal distance around p. Furthermore, if during
the simplification all the internal points of a polyline
are removed, the dummy points are also added around
the resulting polyline. This ensures that no simplifi-
cation would create a polyline coincident to p. Fig-
ure 8 presents an example where all interior points of
a polyline p are removed and, then, two dummy points
are added to the map.
Another concern is about the special case in which
some line segments are colinear to the endpoints of a
polyline. For instance, in Figure 9 there are no control
points or polylines within the triangle v
i
, v
i
, v
i+1
and,
therefore, Algorithm 1 could remove vertex v
i
, creat-
ing coinciding segments. This special case is treated
by considering every point along the edges of the tri-
angle v
i−1
, v
i
, v
i+1
are inside triangle, thus not remov-
ing v
i
.
Figure 9: Example of polylines with the same endpoints:
if v
i
is removed, the resulting polyline will have segments
coinciding with segments of the other polyline. To solve
that, it is considered that points on the edges of the triangle
v
i−1
, v
i
, v
i+1
(points a, b and c) are effectively inside the
triangle.
The bottleneck of Grid-Gen is to detect if a poly-
line or control point lies inside a triangle. To speedup
this step, a uniform grid (Franklin et al., 1989) is used.
More specifically, the idea is to create a N × M grid
(where N and M are parameters defined by the user),
superimposed over the map being simplified. Each
cell c of the grid contains a list of all points (poly-
line and control points) inside it. Given a triangle t,
only the points in the cells that intersect t need to be
checked in order to verify if there is any point in t. If
a polyline is simplified, the point removed from the
polyline is also removed from the uniform grid. Fig-
ure 10 presents an example of an uniform grid super-
imposed on a map.
3.2 Extending Grid-Gen
As explained in section 3.1, Grid-Gen iteratively pro-
cesses the input map removing interior points from
the polylines that would not cause a topology incon-
sistency. Although this strategy can efficiently simpli-
fies a map avoiding topological inconsistency, it does
not try to keep the simplified map geometry similar to
the original one.
The TopoVW is an extension of Grid-Gen that
ranks the interior polyline points based on their “rele-
ICEIS2015-17thInternationalConferenceonEnterpriseInformationSystems
520

Algorithm 2: Pseudo-code for the Visvalingam-Whyatt generalization method.
1: Data: Input line L as a list of points, separate list R of ranked points
2: Compute the effective area of each point on the line
3: Delete all points with zero area and store them in a separate list
4: loop
5: Find the point with least effective area and call it current point.
6: Delete the current point from the original list L and add it to the ranked list R with its effective area
7: Recalculate the effective area of the two adjacent points
8: if Size of L = 2 then Terminate
9: end if
10: end loop
Figure 10: Example of a 3 × 5 uniform grid superimposed
over a map.
vance” to the map shape and performes the map sim-
plification iteratively removing the least “relevant”
point. More precisely, the points are ranked using a
strategy similar to Visvalingam-Whyatt (Visvalingam
and Whyatt, 1993) algorithm’s and, a simplification
process similar to Grid-Gen is performed in the map,
processing the points in an order based on their rank.
3.2.1 Visvalingam-Whyatt Algorithm
A method for line generalization proposed by Vis-
valingam and Whyatt (Visvalingam and Whyatt,
1993) uses the effective area of a point to define the
point elimination sequence. This method is suitable
for both minimal generalization and caricatural gen-
eralization. The Effective area of a point v
i
is defined
as the area of the triangle formed by v
i
and its neigh-
bours, that is, the triangle whose vertices are v
i−1
, v
i
and v
i+1
. This represents the areal displacement cre-
ated if point v
i
is removed from the line. The algo-
rithm for Visvalingam-Whyatt method is as follows
(Algorithm 2):
As seen in Algorithm 2, it removes points from
an input line L and adds these points to a list R
ranked by the effective area of each point. This can
be used to only include the most important points
in the resulting line, as determined by a cut-off fac-
tor. This method has shown better results than other
simplification algorithms such as the ones proposed
by Ramer-Douglas-Peucker (Douglas and Peucker,
1973), Roberge (Roberg
´
e, 1985), and Dettori and Fal-
cidieno (Dettori and Falcidieno, 1982).
3.2.2 The Method TopoVW
While the ranking point strategy tries to generate sim-
plified maps similar to the original input data, the
topological inconsistency detection strategy derived
from Grid-Gen ensures that no topological error is
introduced in the output map. The method TopoVW
consists of integrating both strategies.
Given a polyline point v
i
, the rank of v
i
is de-
fined based on the effective area of v
i
. As shown
by Visvalingam-Whyatt (Visvalingam and Whyatt,
1993), points with higher effective areas are usually
“more relevant” than points with smaller areas for
preserving the original shape and, thus, during the
simplification step, points with smaller effective areas
have higher priority for deletion. In order to preserve
topological consistency, the simplifications step uses
an approach similar to Grid-Gen
˜
’s for point deletion.
For efficiency purposes, TopoVW initially pre-
processes the input data computing the effective area
of the polyline points. These points are kept in a
priority queue with priority based on the point’s ef-
fective areas. Since the interior points of all poly-
lines are kept in the same priority queue, TopoVW
simplifies the polylines globally, that is, in different
iterations points from different polylines may be re-
moved. When a point v
i
is deleted from the map, this
may change only the effective area of its two adjacent
points v
i−1
and v
i+1
(in L’s polyline) and, thus, these
two areas are recomputed and the new values are used
to update the priority of v
i−1
and v
i+1
in the queue.
4 EXPERIMENTAL EVALUATION
TopoVW was tested on a computer with the follow-
ing configuration: Intel
R
Core
TM
2 Duo E7500 at
AnEfficientandTopologicallyCorrectMapGeneralizationHeuristic
521

1596 MHz, 4GB of RAM, Seagate ST2000DM001-
1CH1 7200 RPM SATA hard-drive, and Linux Mint
17 Qiana.
The tests were performed on the same datasets
previously used by Magalh
˜
aes et al. (Magalh
˜
aes et al.,
2014): the first 5 datasets were used by the ACM GIS-
CUP 2014 (ACM SIGSPATIAL Cup, 2014) organiz-
ers to evaluate the algorithms submitted to the GIS-
CUP contest. Since datasets 1 and 2 were too small
(they contained less than 2000 polyline points and less
than 200 control points), test results for both datasets
were not included in this paper.
The polygons in dataset 6 were obtained from
IBGE’s (the Brazilian geography agency) web-
site (IBGE: Instituto Brasileiro de Geografia e Esta-
tistica, 2014) and represents the Brazilian county di-
visions. Dataset 7 represents the United States con-
tinental county division and was obtained from the
United States Census website (United States Census,
2014). The control points in datasets 6 and 7 were
selected in random positions in the maps. Table 1
presents the number of control and polyline points in
each map.
Comparisons between the processing times of
TopoVW and Grid-Gen were performed. Both meth-
ods were configured to simplify the maps by remov-
ing 50% of their points. The uniform grid size was
chosen based on the configuration that led to the
fastest performance in Magalh
˜
aes et al. paper (Ma-
galh
˜
aes et al., 2014). Table 1 presents the time that
the two methods spent in the simplification process
and, also, the I/O time to load the map (in the GIS-
CUP GML format) and write the output (the I/O time
is the same to the two implementations).
Observe that, in the worst case, the simplification
step of TopoVW was 7 times slower than the same
step in Grid-Gen. However, in all scenarios I/O used
a considerable amount of the total processing time.
Indeed, if the total running time of the algorithms
was considered, TopoVW was less than 3 times slower
than Grid-Gen in the worst test.
Table 1: Processing-time (in milliseconds) for simplifying
the datasets with control points.
Dataset 3 4 5 6 7
Polyline pts. (×10
3
) 8 30 30 300 4000
Control points 151 256 1607 10
4
10
7
I/O 12 37 53 447 89187
Simp. (TopoVW) 9 52 46 1469 95732
Simp. (Grid-Gen) 4 16 15 196 19158
Figure 11(a) presents an example of a region from
dataset 3. In this Figure, the original dataset and the
simplified map obtained by the two methods are over-
Table 2: Processing-time (in milliseconds) for simplifying
the datasets without using control points.
Dataset 3 4 5 6 7
Control points 151 256 1607 10
4
10
7
I/O 9 32 37 490 3856
Simp. (TopoVW) 8 49 42 1400 89439
Simp. (Grid-Gen) 3 14 12 195 16892
Simp. (VW) 6 24 23 900 21062
(a)
(b)
Figure 11: (a) Region of a simplified map representing part
of dataset 3. The polylines in solid, dotted and dashed repre-
sent, respectively, the original map and the maps simplified
by Grid-Gen and TopoVW (both methods were configured
to remove 50% of the polyline points); (b) Zoomed region
from the map.
layed, with the original map in the top layer. It is easy
to see that TopoVW maintained the map shape better
than does Grid-Gen. Indeed, it is difficult to see in this
figure regions where the dashed polylines that repre-
sents the map simplified by TopoVW are visible. Fig-
ure 11(b) displays a zoomed region from the map in
Figure 11(a) where it is possible to observe the differ-
ence between the three maps. Notice that TopoVW’s
output keeps the similarity with the original map bet-
ter than does Grid-Gen. It is important to mention
that, even though both methods were configured to
remove the same amount of points from the map,
Grid-Gen processes each polyline independently try-
ing to remove the maximum amount of points from
ICEIS2015-17thInternationalConferenceonEnterpriseInformationSystems
522

Table 3: Maximum number of points removed by simplification.
Dataset 1 2 3 4 5 6 7
No. of points 992 1564 8531 28014 28323 342738 3645559
Visvalingam-Whyatt 938 1472 7579 25308 23661 309648 3627135
Grid-Gen 938 1463 7578 25298 23639 309445 3627008
TopoVW 938 1463 7578 25297 23640 309424 3626993
Grid-Gen w/ Control Pts. 928 1435 7545 25212 23411 308992 3609484
TopoVW w/ Control Pts. 927 1430 7545 25207 23390 308935 3627008
each one (until the total number of points removed
reach the target value) and, thus, some polylines may
be too simplified (while no points are removed from
other lines). TopoVW, on the other hand, performs
the simplification globally (removing, in each step,
the less significant point considering all the polylines)
and, therefore, the balance in the number of points re-
moved from each polyline is better.
We also compared the processing time of
TopoVW, Grid-Gen, and the Visvalingam-Whyatt al-
gorithm (VW) when they were configured to remove
50% of the map points. The times, in milliseconds,
are presented in Table 2. Since VW does not support
the use of control points, the control points from the
datasets were removed during these tests. In the worst
test scenario, the simplification time of TopoVW was
only 4 times slower than VW. This suggests that the
overhead associated with the topological verifications
performed by TopoVW does not add a big impact in
the performance of the algorithm.
Another comparison was made between a
Visvalingam-Whyatt algorithm implementation
(VW), Grid-Gen and TopoVW regarding the maxi-
mum amount of points that these methods can remove
due to the simplification.
The three methods were used to simplify maps
from the dataset previously used, attempting to re-
move the maximum amount of points from the origi-
nal maps. Additionally, both Grid-Gen and TopoVW
were tested with and without control points. The re-
sults are shown in Table 3. In no test case TopoVW re-
moved more points than VW. This happened because
TopoVW preserves the topological consistency of the
map and, thus, some points that the VW algorithm re-
moves may not be removed by TopoVW. Indeed, since
VW does not try to satisfy the topological constraints
it removes all the interior points from the polylines
(keeping only the endpoints) when it is configured to
remove the maximum amount of points.
Furthermore, when the methods were tested us-
ing control points, the number of points removed
by TopoVW was smaller than when using no control
points. Again, this happens because when there are
control points the amount of topological constraints
that TopoVW needs to satisfy increases.
Figure 12 presents a comparison between the out-
put generated by VW (represented by solid lines, in
the top layer) and TopoVW’s output (represented by
dashed lines) when both methods were configured to
remove 50% of the polylines points in dataset 6 (since
VW does not support the use of control points, both
methods were executed using no control points). No-
tice that it is difficult to observe differences between
the outputs of the two methods. When they happen,
these differences (shown in the zoomed part of the
map) are caused due to the fact that VW does not avoid
topological errors.
In all datasets, we observed few (and small) dif-
ferences between VW and TopoVW’s output. These
differences appear mainly in the regions where VW’s
output contains topological errors. Since the VW
algorithm is suitable for computing map minimal
generalization and caricatural generalization with
good quality (Visvalingam and Whyatt, 1993) and
TopoVW’s output is similar to VW’s, this suggests that
TopoVW can also compute these kinds of generaliza-
tion with good quality while having the advantage of
not creating topological errors.
5 CONCLUSIONS AND FUTURE
WORKS
It was presented TopoVW, a heuristic that uses tech-
niques based on the Visvalingam-Whyatt (VW) (Vis-
valingam and Whyatt, 1993) algorithm to perform
map simplification generating maps that not only are
topologically consistent but also tries to preserve the
similarity with the original datasets. This means that,
if applied to a map containing roads, buildings and
rivers, TopoVW
´
s simplification will neither produce
intersections of such features nor change the topolog-
ical relationships (for example, if a road is in the left
side of a building it will continue in the left side af-
ter the simplification). TopoVW also supports the use
of control points in the generalization process, avoid-
ing changing the topological relationships between
the polylines and these control points. Control points
may be used in practical applications such as simpli-
AnEfficientandTopologicallyCorrectMapGeneralizationHeuristic
523

(a)
(b)
Figure 12: Comparison between the output generated by
VW (represented by solid lines, in the top layer) and
TopoVW’s output (represented by dashed lines) using
dataset 6 as input: (a) Part of the Northeast of Brazil. (b)
Zoom in a region where it is possible to see a small differ-
ence between the outputs.
fying state/county maps, where lines represent county
borders and cities may be represented by points (more
specifically, control points). If TopoVW is applied to
this situation, it is guaranteed that no point will be on
the wrong side of the lines. Namely, after simplifica-
tion, every city will stay inside the correct county or
state.
During the experiments, we observed that
TopoVW’s output is very similar to VW’s. In fact,
the small differences that we observed between the
methods happened in regions were VW created topo-
logical errors. Since VW is suitable for creating map
generalizations and caricatures with good quality, this
suggests that TopoVW also has this feature.
As the tests showed, TopoVW is very efficient, be-
ing only 7 times slower than Grid-Gen a method that
avoids topological errors during the simplification but
does not try to keep the similarity between the input
and the output maps. Furthermore, it adds little over-
head to the VW algorithm (an algorithm that, despites
keeping the similarity between the input and output,
does not try to preserve the topological relationships),
being only 4 times slower than VW. Finally, TopoVW
uses dummy control points to treat its special cases
and, thus, it is very simple to implement.
Future work includes comparing TopoVW’s per-
formance and output quality against methods based
on the Ramer-Douglas-Peucker algorithm. Further-
more, another extension is to perform more tests in
order to evaluate the quality of TopoVW’s output not
only in maps, but also in vector illustrations. Finally,
another interesting work is to adapt TopoVW to per-
form simplification of 3D vector objects.
ACKNOWLEDGEMENTS
This research was partially supported by CNPq,
CAPES (Ciencia sem Fronteiras), FAPEMIG and
NSF grant IIS-1117277.
REFERENCES
ACM SIGSPATIAL Cup (2014). GIS Cup sample data.
mypages.iit.edu/∼xzhang22/GISCUP2014/ (accessed
on 12/01/2014).
Da Silva, A. C. and Wu, S.-T. (2005). Preserving coinci-
dence and incidence topologies in saalfeld’s polyline
simplification algorithm. In Proceedings of Simposio
Brasileiro de Geoinformatica (GeoInfo), pages 107–
121. INPE.
Dettori, G. and Falcidieno, B. (1982). An algorithm for
selecting main points on a line. Computers & Geo-
sciences, 8(1):3–10.
Douglas, D. H. and Peucker, T. K. (1973). Algorithms for
the reduction of the number of points required to rep-
resent a digitized line or its caricature. Cartograph-
ica: The International Journal for Geographic Infor-
mation and Geovisualization, 10(2):112–122.
Estkowski, R. and Mitchell, J. S. (2001). Simplifying a
polygonal subdivision while keeping it simple. In
Proceedings of the seventeenth annual symposium on
Computational geometry, pages 40–49. ACM.
Franklin, W. R., Narayanaswami, C., Kankanhalli, M., Sun,
D., Zhou, M.-C., and Wu, P. Y. (1989). Uniform grids:
A technique for intersection detection on serial and
parallel machines. In Proceedings of Auto-Carto, vol-
ume 9, pages 100–109.
IBGE: Instituto Brasileiro de Geografia e Estatistica (2014).
Malhas digitais dos municipios Brasileiros. ge-
oftp.ibge.gov.br/malhas digitais/municipio 2007/ (ac-
cessed on 12/01/2014).
Jo
˜
ao, E. (1998). Causes and Consequences of map gener-
alization. CRC Press.
Kirkpatrick, S., Gelatt, C. D., and Vecchi, M. P. (1983).
Optimization by simulated annealing. Science,
220(4598):671–680.
Li, L., Wang, Q., Zhang, X., and Wang, H. (2013). An algo-
rithm for fast topological consistent simplification of
face features. Journal of Computational Information
Systems, 9(2):791–803.
Mackaness, W. A., Ruas, A., and Sarjakoski, L. T. (2011).
Generalisation of geographic information: carto-
graphic modelling and applications. Elsevier.
ICEIS2015-17thInternationalConferenceonEnterpriseInformationSystems
524

Magalh
˜
aes, S. V. G., Franklin, W. R., Li, W., and Andrade,
M. V. A. (2014). Fast map generalization heuristic
with a uniform grid. In ACM SIGSPATIAL.
Ramer, U. (1972). An iterative procedure for the polygonal
approximation of plane curves. Computer Graphics
and Image Processing, 1(3):244–256.
Roberg
´
e, J. (1985). A data reduction algorithm for planar
curves. Computer Vision, Graphics, and Image Pro-
cessing, 29(2):168–195.
Ruas, A. and Lagrange, J.-P. (1995). Data knowledge
and modelling for generalization. MULLER, JC, LA-
GRANGE, JP, WEIBEL, R. GIS and generalization:
metodology and practice. GISDATA I, serie editors,
pages 73–90.
Saalfeld, A. (1999). Topologically consistent line simplifi-
cation with the douglas-peucker algorithm. Cartogra-
phy and Geographic Information Science, 26(1):7–18.
Shea, K. and McMaster, R. B. (1989). Cartographic gener-
alization in a digital environment: When and how to
generalize. In Proceedings of AutoCarto.
United States Census (2014). US counties Shapefiles.
www.census.gov/cgi-bin/geo/shapefiles2013/main
(accessed on 12/01/2014).
Visvalingam, M. and Whyatt, J. (1993). Line generalisation
by repeated elimination of points. The Cartographic
Journal, 30(1):46–51.
Ware, J. M., Jones, C. B., and Thomas, N. (2003). Auto-
mated map generalization with multiple operators: a
simulated annealing approach. International Journal
of Geographical Information Science, 17:743–769.
AnEfficientandTopologicallyCorrectMapGeneralizationHeuristic
525
