
Interactive System for Objects Recognition using 3D Camera, Point
Cloud Segmentation and Augmented Reality User Interface
Matej Nikorovic
1,2
, Radoslav Gargalik
1,2
and Zoltan Tomori
2
1
Institute of Computer Science, Faculty of Natural Science, P. J. Safarik University, Kosice, Slovakia
2
Institute of Experimental Physics, Slovak Academy of Science, Kosice, Slovakia
1 ABSTRACT
Depth-sensing cameras are frequently used in com-
puter vision and augmented reality applications as a
key component of the point cloud acquisition system
as well as a natural user interface tool. We integrated
both these functions into the automatic objects recog-
nition system based on the machine learning. Ac-
quired point cloud is segmented by the region grow-
ing algorithm exploiting smoothness constraint as a
homogeneity criterion. Segmented objects lying on
the ground plane are recognized via the supervised
machine learning and the corresponding label is is
projected near to the object. Natural user interface
controls the learning process as well as the mode of
operation. System is proper for specific environments
like e.g. science center (museum).
2 STAGE OF THE RESEARCH
Recently (September 2014), the first author of this pa-
per became a PhD student at the Department of Com-
puter Science, P. J. Safarik University, Kosice, Slo-
vakia. This paper brings a review of literature, techni-
cal background and some preliminary results related
to future PhD work.
3 OUTLINE OF OBJECTIVES
We plan to develop a simple and low-cost objects
recognition system based on the supervised machine
learning and install it in the science museum taking
into account following specific conditions:
• Most of visitors are groups of children requiring
simple, robust and self-explanatory control of the
exhibits.
• No extra hardware such as keyboard, mouse, ca-
bles etc. is acceptable.
• The interaction with exhibits should exploit the
virtual menu based on the same camera as the ex-
hibit itself.
• The function of menu must be very simple – usu-
ally just select the mode of operation.
• Periodical innovation and upgrade of exhibits is
the necessary condition to achieve repeating visits
of the same people.
• The museum is open daily for more than 100 of
visitors per day so the time for the installation and
testing of exhibits in real conditions is limited.
Machine learning libraries became a part of
popular open-source libraries (like OpenCV) which
opened the new possibilities in analyzing and under-
standing images. New low-cost 3D cameras like Mi-
crosoft Kinect, Creative Senz3D or Asus Xtion can
acquire both RGB and depth images at the same time.
If these devices are properly calibrated, then we are
able to create a set of 3D points (point cloud) from
acquired images.
Our objective is to propose and implement a low-
cost objects recognition system proper for the above
mentioned specific conditions of science center (mu-
seum). It means the human interaction is required
only in the supervised learning stage. Our goal is to
implement the recognition system into two existing
exhibits of ”Steel Park” science center – ”Interactive
statue” and ”Interactive sandbox” described in (To-
mori et al., 2015)
4 RESEARCH PROBLEM
To achieve the above mentioned goal, we have to deal
with all stages of the process consisting of:
1. Acquisition of point cloud.
2. Segmentation in 3D.
3. Features extraction.
4. Recognition (classification).
31
Nikorovic M., Gargalik R. and Tomori Z..
Interactive System for Objects Recognition using 3D Camera, Point Cloud Segmentation and Augmented Reality User Interface.
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

5. Visualization and interactive control via natural
user interface.
The critical part of our research is the segmenta-
tion as a process of grouping image pixels into a set of
segments hopefully representing our objects of inter-
est. Subsequent object recognition classifies the ob-
jects into some classes using pre-specified rules in the
supervised learning stage. Natural User Interface is
necessary for communication between the human and
the machine.
The last stage is visualization which shows pro-
jected objects’ labels on the ground-plane shown on
Figure 1.
Figure 1: Objects’ labels in Slovak language are shown on
the ground-plane. We can see that although the dominant
descriptor is color, due to other descriptors mentioned later
it is able to distinguish orange from mandarin having the
similar color.
5 STATE OF THE ART
The traditional RGB image segmentation was one of
the most intensively studied part of computer vision.
However, the importance of point cloud segmentation
methods increases along with appearance of depth-
sensing cameras.
(Sedlacek and Zara, 2009) and (Golovinskiy and
Funkhouser, 2009) solve simplified point cloud seg-
mentation task. The goal is to divide point cloud into
the object of interest and the background. The authors
developed an interactive application in which the user
have to specify parts of point cloud belonging either to
the object of interest or to the background. Remaining
points are classified by the algorithm based on the en-
ergy minimization function using the weighted graph
constructed from the point cloud. The user specified
points influence weights in the graph and the algo-
rithm searches for the minimal cut (Boykov and Kol-
mogorov, 2004). The resulting graph is divided into
source part (object of interest) and sink part (back-
ground).
(Dal Mutto et al., 2010) described segmentation
as grouping the data with similar attributes using ma-
chine learning principles. Six dimensional vectors,
consisting of point location and point color in uni-
form color space, are used as the input of the k-means
method (Arthur and Vassilvitskii, 2007) to find seg-
ments in a point cloud. The result of segmentation
contains also a lot of noisy segments and therefore
some post-processing method is used.
In contrast (Rabbani et al., 2006), (Wang and
Shan, 2009), (Vosselman, 2013), (Castillo et al.,
2013), (Dupuis et al., 2014), (Zhan et al., 2009)
use seeded region-growing method to segment the
point cloud. They choose the starting seeds and let
segments grow respecting the homogenity criterion.
Their approaches differ in the way how to select the
starting seeds and which attributes are used in a ho-
mogenity criterion (e.g. close distance, similar color,
similar surface normal, similar curvature or their com-
bination between 2 points in a neighborhood). Our
work is based on this principle too.
6 METHODOLOGY
Our concept of point cloud grouping into segments
and subsequent recognition of the segments should
respect specific conditions mentioned in the Outline
of Objectives and should use low-cost hardware and
open source software.
6.1 Hardware
Projection-based augmented reality (Mine et al.,
2012) can project images onto the real surface using
one or several projectors.
For the prototyping purposes and for experi-
ments with projector-based augmented reality we
constructed the setup shown on Figure 2. Projector
P and 3D camera C share the same mount attached to
the massive stand. A calibration matrix compensates
the translation and possible rotation between them.
The objects of interest are located on a solid planar
plate, which is placed inside the field of view of the
camera.
We exploited projector BENQ MX613ST and
depth-sensing camera Microsoft Kinect for Xbox 360
(Windows v1). We used OpenNI library to acquire
RGB and depth images. The library offers to trans-
form these images into point cloud.
For experiments with ”Interactive statue” (Figure
3 left) we constructed its minimized version (Figure 3
right) using the identical hardware (Creative Senz3D
VISIGRAPP2015-DoctoralConsortium
32
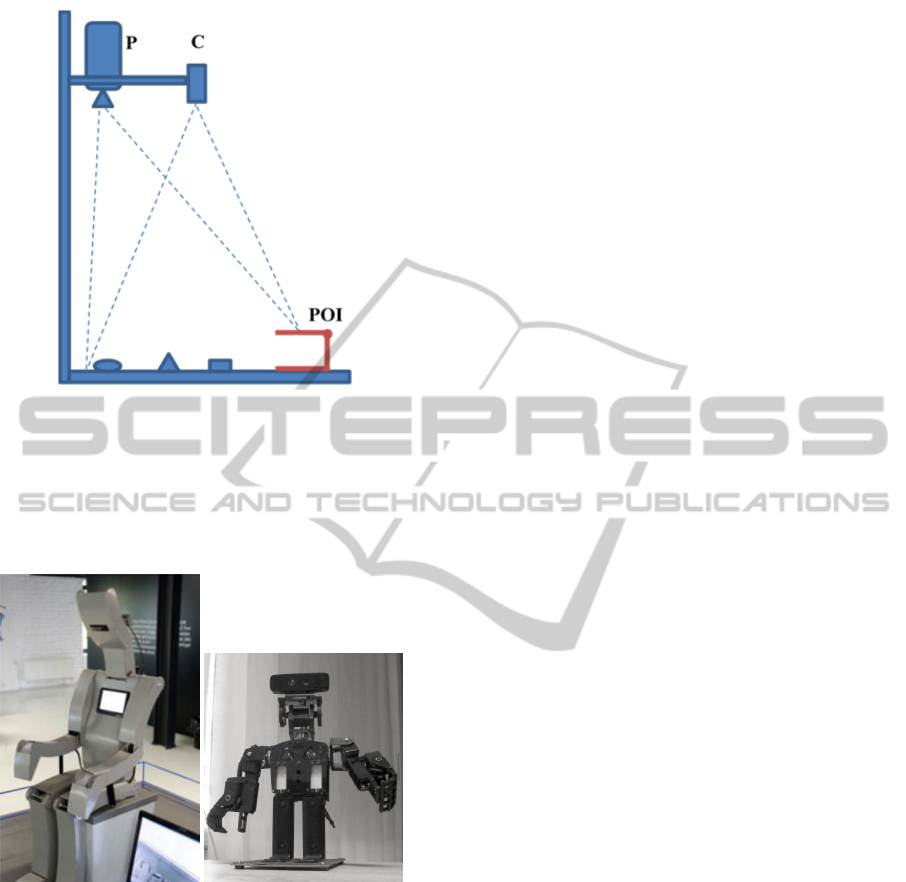
Figure 2: Setup for Projection-Based Augmented Reality
Experiments. P – Projector, C – 3D Camera, POI – Plane of
Interaction.
camera supplied by Intel along with PC SDK soft-
ware, servomotors Hitec HS-645MG controlled by
Phidgets servo motor controller).
Figure 3: Small robot is used as a prototype of the bigger
one located in science center.
6.2 Point Cloud Segmentation
Finding segments correlated with the real objects is a
non-trivial process described in the following subsec-
tions.
6.2.1 Point Cloud Reduction
We have to process the large amounts of data (point
cloud) and therefore it is important to reduce them.
VoxelGrid filter divides 3D space containing the point
cloud into small voxels (3D boxes in space) and every
voxel is approximated by its centroid in a new point
cloud. The new point cloud is the reduced version of
the original one, points are uniformly distributed and
additive noise is suppressed.
6.2.2 Nearest Neighbors Search
Local neighborhood of a single point consists of all
surrounding points that are closer than a given small
radius. Two approaches can be used to obtain it:
1. select k-nearest neighbors (kNN),
2. select fixed distance nearest neighbors (FDNN).
We have uniformly distributed points, therefore
FDNN is the better choice (in contrast to (Rabbani
et al., 2006)).
Clustering method is the effective implementation
of the nearest neighbors search. The method uses
VoxelGrid to group the points into clusters omitting
far points as neighbors (it is sufficient to check only
the surrounding voxels to find the local neighborhood
of the point).
6.2.3 Surface Normal Estimation
We can estimate the surface normal in a point by its
local neighborhood. Paper (Klasing et al., 2009) com-
pare surface normal estimation methods. The most ro-
bust one is PlanePCA based on Principal component
analysis (PCA), which is the statistical procedure to
find perpendicular vectors of the biggest variance of
data. PCA will return 3 eigenvectors if data is 3 di-
mensional. Two of them having the greatest eigen-
value are direction vectors of estimated plane and the
last one is plane (surface) normal.
Accuracy of the surface normal estimation de-
pends on the size of its local neighborhood. Too few
points means that the surface normal estimation will
be inaccurate (under-fitting). The opposite state is
over-fitting. The compromise between under-fitting
and over-fitting was experimentally tested in (Rabbani
et al., 2006). Good estimation is approx. 50 points in
a local neighborhood.
Automatic selection of the neighborhood radius
(our approach) consists of:
1. Select k points by the point cloud randomly uni-
formly.
2. Create a new distance list.
3. For each point find 50th nearest neighbor and add
its distance to the list.
4. Return upper quartile from the list.
InteractiveSystemforObjectsRecognitionusing3DCamera,PointCloudSegmentationandAugmentedRealityUser
Interface
33
6.2.4 Region-growing
We try to find independent segments in point cloud by
a seeded region-growing algorithm (in graph theory
it is also called breadth-first search). Growing is the
process of adding actual seed’s neighbors with similar
attributes (using homogeneity criterion) to the same
segment.
Smoothness constraint by (Rabbani et al., 2006)
modifies homogeneity criterion to allow region-
growing algorithm to find smooth connected objects.
The constraint is based on the small difference be-
tween surface normals of adjacent points. A new seed
point is selected according to the lowest surface cur-
vature of the non-visited point in the point cloud. We
approximate surface curvature in the point by mean
square distance (1, 2) between the points in the neigh-
borhood and a plane created by the point’s location
and surface normal.
distance(ρ, P) =
Ax +By +Cz + D
√
A
2
+ B
2
+C
2
, (1)
where P = (x, y, z) is point, ρ is plane and (A, B,C, D)
are ρ’s general plane equation’s parameters.
mean square distance =
1
n
n
∑
i=1
distance(ρ, P
i
)
2
(2)
6.2.5 Plane Detection
RANSAC (RAndom SAmple Consensus) is iterative
algorithm to find the best model in data. It is fre-
quently used to detect planes but in large point clouds
it requires a lots of iterations to work properly.
We can detect all planes in the point cloud much
quicker by using region-growing algorithm. If we add
plane distance constraint to the first seed point into
homogeneity criterion then it will able to detect all
planes in point cloud.
6.2.6 Ground-plane Removal
Ground-plane is usually the biggest plane of point
clouds acquired by a depth-sensing camera and there-
fore we simply remove the biggest plane from the
point cloud (similar idea was mentioned in (Dupuis
et al., 2014).
The first seed point can contain additive noise and
therefore it is necessary to refine the plane. Averaging
surface normals of the segment is one possibility how
to create plane more precise and to add next points
lying on the plane.
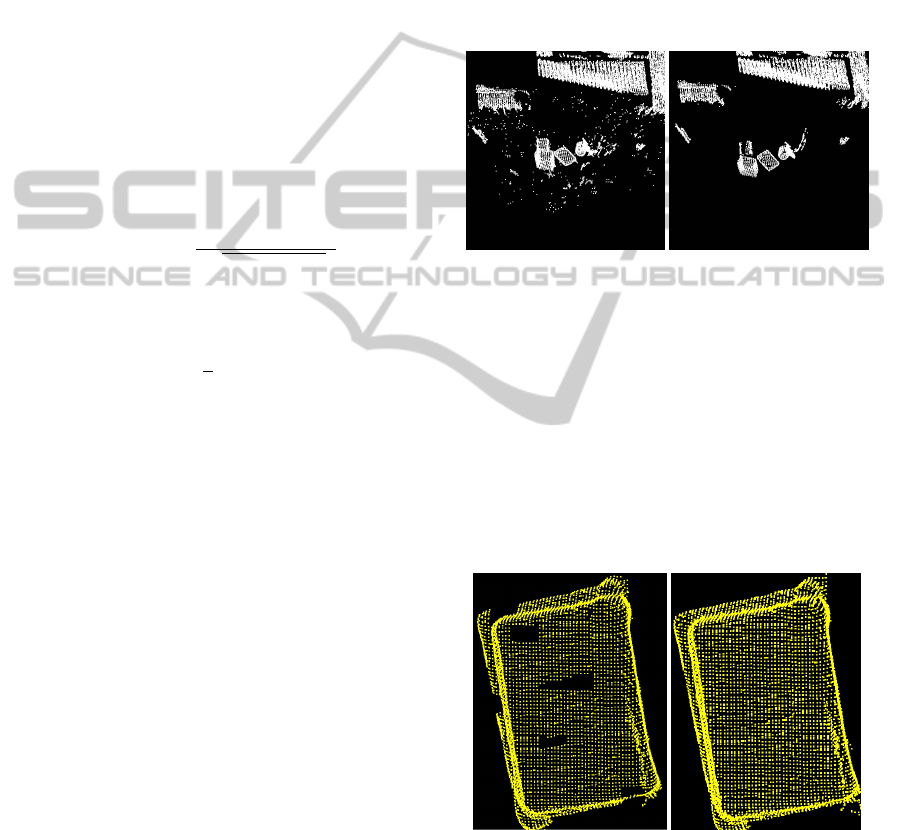
6.2.7 Segment Detection and Noise Removal
After removing the ground-plane we can find seg-
ments in point cloud by region-growing algorithm as
defined above.
The result of segmentation is a list of segments
and its list of the points. A lot of segments con-
tain only a few points (less than a threshold) and we
should remove them as a noise. The selected thresh-
old is the average point count of in the segments. Re-
sult is shown on Figure 4.
Figure 4: Removing noise segments using thresholding.
Removed noise segments left holes in the seg-
ments created by inaccurate surface normal estima-
tion. We proposed method to fill holes in segments
inspired by median filter:
1. Find all points removed by thresholding only.
2. For each removed point find the most frequent
segment in local neighborhood and reassign point
into this segment.
3. Repeat steps 1-2 until no change occurs.
Result is shown on Figure 5.
Figure 5: Filling holes in segments by reassigning removed
points.
6.3 Object Recognition
The result of segmentation is a list of the segments
which we consider as a list of the objects. Object
recognition is based on the proper choice of descriptor
VISIGRAPP2015-DoctoralConsortium
34
and classifier (”No free lunch” theorem). For our pur-
poses we use k-nearest neighbors classifier and 100
dimensional vector described in further subsection.
6.3.1 Descriptor Extraction
Successful object recognition requires a powerful de-
scriptor covering color and geometric attributes of
the object. Traditional features like average color,
roundness or size do not exploit full power of three-
dimensional information available in the object’s
point cloud. Moreover, the descriptor has to be ro-
bust, because Microsoft Kinect for Windows v1 is not
very accurate (was designed for other purposes).
(As’ari et al., 2013) studied the problems of
descriptors for object recognition based on depth-
sensing devices. We proposed a 100 dimensional vec-
tor based on their idea. The first 50 numbers contain
shape histogram (geometric properties) and the others
contain color histogram (color properties).
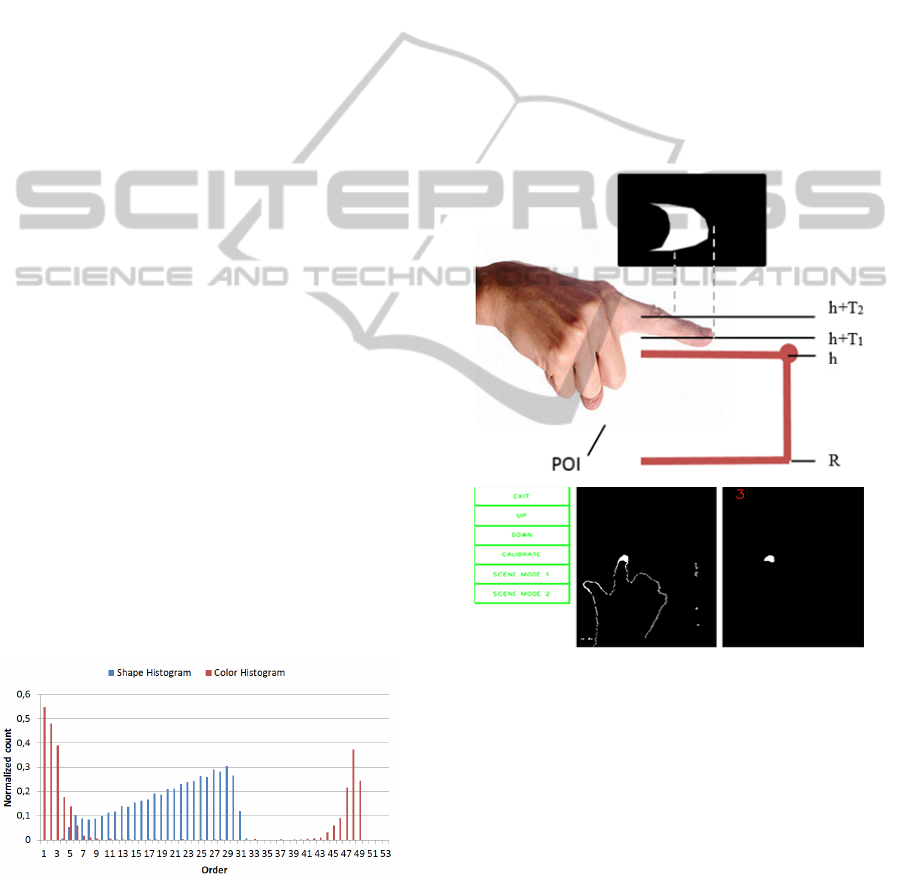
Shape histogram is formed by counting the ob-
ject’s points’ distances to the object’s centroid. At
first, we have to determine the maximum recognition
distance. We uniformly divide the distance into 50 in-
tervals. If an acquired distance (from a point to the
centroid) is within the pre-defined interval then the
interval counter will be incremented (see Figure 6).
Then the resulting vector is normalized to unit length.
Color histogram is formed by counting the ob-
ject’s points’ hue similarly as in the shape histogram.
At first, we transform points’ colors from the RGB
color space into the HSL color space. Subsequently
we remove under-lighted (first quartile) and over-
lighted (fourth quartile) points to minimize the sensor
distortions. The other colors (second and third quar-
tile) we take into the histogram and normalize to the
unit length too.
Figure 6: The shape and color histogram.
6.3.2 Learning Process
During supervised learning we assume only one seg-
mented object lying on the ground-plane. The objects
not lying on the ground-plane are identified as back-
ground. We can choose the object closest to the center
of the ground-plane as the object of interest (remain-
ing objects are background). The user should identify
the selected object of interest and label it by using vir-
tual keyboard menu options as described later.
6.4 Natural User Interface
It is difficult to control our system by mouse and key-
board (see specifics in the initial chapter). This situa-
tion can be solved by augmented reality ”virtual key-
board” system consisting of projector and camera. A
part of ground-plane is defined as Plane of Interaction
(POI) shown on Figure 2), which is able to interact
with the user as can be seen on Figure 7.
Figure 7: Virtual keyboard projected onto the plane of in-
teraction. Fingertip detection principle (top). In-memory
image of menu buttons (left), projected binary image of de-
tected fingertip with noise (middle) and detected fingertip
after noise removal (right).
Two threshold levels T 1 and T 2 represent the
range of sensitive distances from POI. 3D points
having z-coordinate (depth) from the interval < h +
T 1, h + T 2 > create a binary image representing a
rough approximation of the fingertip. To find out
which button is clicked, we first project point cloud
of the fingertip approximation into the ground-plane.
The result of this step is binary image (middle on Fig-
ure 7).
To find out which virtual button has been pushed,
we count projected points in each virtual button rect-
InteractiveSystemforObjectsRecognitionusing3DCamera,PointCloudSegmentationandAugmentedRealityUser
Interface
35

angle from the point cloud and we select the one,
which has the maximum number of projected points
in its rectangle. If the button is selected during few
frames, then we declare the button as clicked.
It should be noted that the orientation of the hand
is not critical to this approach, which is clearly an ad-
vantage.
The precise projection into the ground-plane re-
quires to calibrate projector with camera by defining
ground plane in projector’s coordinate system. For
simple tasks (like projection of labels into the neigh-
borhood of objects) a 3-point calibration is sufficient.
The more complicated tasks will require more sophis-
ticated geometric transformation exploiting a grid of
calibration points.
7 EXPECTED OUTCOME
Currently, we experiment with algorithms using pro-
totype hardware. We expect the successful results of
experiments with objects recognition system would
increase the ”intelligence” (and attractiveness) of ex-
hibits in science center (technological museum) in our
city.
ACKNOWLEDGEMENT
This work has supported by Slovak research grant
agency APVV (grant 0526-11).
REFERENCES
Arthur, D. and Vassilvitskii, S. (2007). k-means++: The
advantages of careful seeding. In SODA ’07 Proceed-
ings of the eighteenth annual ACM-SIAM symposium
on Discrete algorithms.
As’ari, M., Sheikh, U., and Supriyanto, E. (2013). 3d shape
descriptor for object recognition based on kinect-like
depth image. In Image and Vision Computing. Sci-
enceDirect.
Boykov, Y. and Kolmogorov, V. (2004). An experimental
comparison of min-cut/max-flow algorithms for en-
ergy minimization in vision. In Pattern Analysis and
Machine Intelligence, IEEE Transactions.
Castillo, E., Liang, J., and Zhao, H. (2013). Point cloud
segmentation and denoising via constrained nonlin-
ear least squares normal estimates. In Innovations for
Shape Analysis. Springer Berlin Heidelberg.
Dal Mutto, C., Zanuttigh, P., and Cortelazzo, G. M. (2010).
Scene segmentation by color and depth information
and its applications.
Dupuis, J., Paulus, S., Behmann, J., Plumer, L., and
Kuhlmann, H. (2014). A multi-resolution approach
for an automated fusion of different low-cost 3d sen-
sors. In Sensors 2014.
Golovinskiy, A. and Funkhouser, T. (2009). Min-cut based
segmentation of point clouds. In IEEE Workshop on
Search in 3D and Video (S3DV) at ICCV.
Klasing, K., Althoff, D., Wollherr, D., and Buss, M. (2009).
Comparison of surface normal estimation methods for
range sensing applications. In Robotics and Automa-
tion. IEEE.
Mine, M., Rose, D., Yang, B., Vanbaar, J., and Grundhofer,
A. (2012). Projection-based augmented reality in dis-
ney theme parks. In Computer 45, 7, pages 32–40.
Rabbani, T., van den Heuvel, F. A., and Vosselman, G.
(2006). Segmentation of point clouds using smooth-
ness constraint. In Robotics and Automation. ISPRS
Commission V Symposium ’Image Engineering and
Vision Metrology’.
Sedlacek, D. and Zara, J. (2009). Graph cut based point-
cloud segmentation for polygonal reconstruction. In
Advances in Visual Computing.
Tomori, Z., Vanko, P., and Vaitovic, B. (2015). Using of
low-cost 3d cameras to control interactive exhibits in
science center. In Sincak, P., Hartono, P., Vircikova,
M., Vascak, J., and Jaksa, R. (Eds.): ‘Emergent Trends
in Robotics and Intelligent Systems: Where is the role
of intelligent technologies in the next generation of
robots? Springer.
Vosselman, G. (2013). Point cloud segmentation for urban
scene classification. In International Archives of the
Photogrammetry, Remote Sensing and Spatial Infor-
mation Sciences. ISPRS2013-SSG.
Wang, J. and Shan, J. (2009). Segmentation of lidar point
clouds for building extraction. ASPRS 2009 Annual
Conference.
Zhan, Q., Liang, Y., and Xiao, Y. (2009). Color-based seg-
mentation of point clouds. In Laser scanning 2009.
IAPRS.
VISIGRAPP2015-DoctoralConsortium
36
