
Design and Implementation of Transportation Management System
I. Ashour, M. Zorkany
and M. Shiple
National Telecomminication Institute (NTI), Cairo, Egypt
Keywords: Intelligent Transportation System (ITS), Arrival Time Prediction, Neural Network, Android Application.
Abstract: This paper proposes an effective method of transportation management system. This proposed system is
designed to interconnect public transport vehicles and bus stations to “Central Room” to monitor the vehicles
& traffic status. Based on the collected data and via analyzing road condition, estimated arrival times are
computed and transmitted to all relevant stations. The main structure of proposed system consists of Bus unit,
station unit and main control centre with servers. Bus and station unit can be hardware unit or mobile android
unit. Monitoring Busses based on GPS and GPRS applications. The data transferred between Bus units, station
units and the main servers are managed via GPRS/UMTS link. At the server (Central Room) and based on
the collected data from buses and via analyzing road condition, accurate arrival times will be computed (Via
Neural network (NN) / Kalman Filter (KF)) and transmitted to all relevant stations. In this paper, we proposed
a modified technique to predict bus arrival time depending on the two algorithms (NN & KF) simultaneously
to take advantage of historical data (NN) with current data (KF). Achieving these main features will cause
major improvements in public transport convenience and safety. Field tests were performed under real traffic
situations in order to test the system.
1 INTRODUCTION
Intelligent Transportation Systems (ITS) domains
include many areas as public transportation control
framework, road traffic management and the
application of traffic control. Vehicle monitoring and
transportation management systems fall under the
category of (ITS).
Many previous studies and systems have been
addressing intelligent transportation and vehicle
monitoring systems (Han and Huh, 2011; Doğan et
al., 2010; Hickman and Hanowski, 2011). Intelligent
transportation systems enable various technologies to
be applied in management of transportation and is
defined as the use of information and communication
technologies to collect, process, and transmit traffic
data to transport users and operators (Qin et al.,
2008). Vehicle monitoring systems, however, only
take vehicles into account; for example, auto-
positioning systems can be applied to vehicle
monitoring, vehicle control, and vehicle
management. Addressing the problem of public
transportation commuters in Egypt waiting for long
time piling at the middle of the streets, struggling to
catch a bus with all the suffering they meet, the delay
they cause and the accompanying traffic digestion.
When travelling with buses, the passengers want
to know the predicted bus arrival time at the bus stop.
Long waiting time at bus stops may drive away the
anxious travellers and make them reluctant to take
buses. Accurate arrival time of next bus will allow
travellers to take alternative transport choices instead,
and thus mitigate their anxiety and improve their
experience.
Towards this aim, many commercial bus
information providers offer the real-time bus arrival
time to the public. Providing such services, however,
usually requires the cooperation of the bus operating
companies (e.g., installing special location tracking
devices on the buses), and incurs substantial cost (F.
Li Y. et al., 2011; Pengfei et al., 2012; Dihua et al.,
2007). Many research on implementing tracking
systems based on android applications (Manav and
Anupam, 2012; Ruchika and BVR, 2011), but most
of them concentrated on tracking system not fully
management transportation system and estimate
arrival time predilection espials in countries
complicated in traffic as Egypt. Our proposed system
can be implemented based on hardware units or
mobile application units.
The proposed transportation system is designed to
interconnect public transport vehicles and bus
stations to “Central Room” to monitor the vehicles &
11
Ashour I., Zorkany M. and Shiple M..
Design and Implementation of Transportation Management System.
DOI: 10.5220/0005430200110018
In Proceedings of the 1st International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS-2015), pages 11-18
ISBN: 978-989-758-109-0
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

traffic status. Monitoring vehicles based on GPS and
GPRS applications. Via analyzing and processing the
collected data at the control center, we can predict the
bus arrival times at relevant stations.
The prediction times to the next bus will be
announced on screens to passengers on the bus stops.
The next bus stop will be notified to the passengers in
buses using visual & audio announcements.
Achieving these features of the proposed system will
cause major improvements in public transport
convenience and safety, especially in Egypt and
countries like Egypt in transportation. Most vehicle
arrival time prediction in intelligent transportation
system depend on many parameters like: Bus speed,
occupancy, traffic flow, traffic incidents, weather
conditions, daily, weekly and seasonal and many
other parameters which can affect on quality of
prediction times. These large number of parameters
make bus arrival time predictions very complex and
difficult to reach optimal accuracy. Some of these
parameters can be classified as on line predictions
like Bus speed, occupancy, traffic flow, traffic
incidents, weather conditions and other parameters
can be classified as history like daily, weekly and
seasonal.
The proposed algorithm for prediction times relies
on real-time location data (Kalman filter) and takes
into account historical travel times (Neural Network)
as well as temporal and spatial variations of traffic
conditions as presented in our paper (M. Zaki et al.,
2013). Although the two separated algorithms gave us
accepted results as shown in our paper (M. Tantawy
and M. Zorkany, 2014), but still the two algorithms
work individually.
In this paper, we proposed a modified technique
to predict bus arrival time depending on the two
algorithms (NN & KF) simultaneously to take
advantage of historical data (NN) with current data
(KF). So the proposed prediction time method is a
hybrid scheme that combines a neural network (NN)
that infers decision rules from historical data with
Kalman Filter (KF) that fuses prediction calculations
with current data.
This paper is organized as follows. The proposed
Transportation management system is presented in
Section 2. Communication Protocols and Frame
Structure are given in Section 3, System based
Hardware units is presented in section 4, System
based Android applications is presented in section 5.
Arrival time prediction is proposed in section 6.
Simulation results are discussed in section 7 and
finally conclusions are drawn in Section 8.
2 PROPOSED
TRANSPORTATION
MANAGEMENT SYSTEM
The proposed main structure of transportation
management system are given in figure 1, where data
transferred between the buses, the main servers, and
the end users are managed via mobile networks and
Internet. The hardware and firmware units in the
busses collect, control, and process the data while
hardware and firmware units at bus stops “Bus station
Unit” controls and display data received from server.
The bus and station units can be a hardware-based unit
or Android-based unit. The servers host the system
management and processing algorithms, system
database, and web applications. A portal is included to
give the necessary information to the end-users.
For In-Bus units and Station Units, Our proposed
system can be implemented based on hardware units
(In-Bus & Station units) or mobile Android units
(Android unit as In-Bus unit and Android unit as
station) or mix units (hardware and Android).So the
proposed system could be presented in the market in
two different versions: System based customized
Hardware and System based Android application.
At server and based on the collected data from
buses, bus arrival times will be computed (Via Neural
network / Kalman Filter) and transmitted to all
relevant stations. the prediction time for the next
bus(s) to arrive will be displayed on screens on the bus
station. The proposed system is composed of three
main parts: Servers, In-bus unit and Bus stop (Station)
unit.
Figure 1: Main structure of proposed system.
VEHITS2015-InternationalConferenceonVehicleTechnologyandIntelligentTransportSystems
12

2.1 Proposed Network Infrastructure
The proposed framework uses a layered or modular
approach to communications standards, similar to the
layering approach adopted by the Internet and the
International Standardization Organization (ISO).
In general, data communication between system
units in buses, stations, and servers in “Central Room”
can be considered to involve the following primary
levels: Information level, application level, transport
level, sub-network level, and plant level. These levels
can be compared to both of ISO open system
interconnection seven layers model and The
American National Transportation Communication
for ITS Protocol (NTCIP) framework published by
American Association of State Highway and
Transportation Officials (Aashto, 2009).
The proposed framework extends beyond the
communications stack to include informational data
and interfaces to physical communication
infrastructure. Figure 2 shows how the proposed
framework relates to the OSI model.
Figure 2: Proposed Protocol Architecture.
2.2 Communication Sequence
Figure 3 shows the communication sequence for the
proposed system. After system initialization, the
system admin customize the processing servers by
entering the routes, the stations, the authenticated
International Mobile Equipment Identifier (IMEI) for
every Bus/station unit.
When the bus/station units registered to the
processing server in the central room the processing
server can upload the required audio files to the bus-
units. Then location, velocity and other information
for all buses are forwarded to the processing server in
the central room.
The server processed the received information,
using neural network and Kalman filter, and
estimating the arrival time, sending the results to the
database server, the corresponding stations, and to the
portal web site.
Figure 3: Proposed Communication Sequence.
3 COMMUNICATION
PROTOCOLS AND FRAME
STRUCTURE
In general, data communication between in-bus unit
and servers in “Central Room” uses TCP/IP suite,
which run over a GPRS mobile operator network and
higher technology as UMTS. The transmitted frames
to/from the server and busses are classified into three
types of packets.
3.1 Frames between Buses and Server
In the proposed system, three packet frames are used
for communication between buses and sever; bus
registration frame from bus to server, bus route frame
from sever to bus, and bus periodic frame from bus to
sever. The following figure demonstrates the
communication sequence between buses and server.
Figure 4: Sequence diagram of bus unit and server.
DesignandImplementationofTransportationManagementSystem
13

3.1.1 Bus Registration Frame
In the designed system all busses are defined in the
server database though the admin GUI using the IMEI
of the GSM module of unit installed in each bus. The
IMEI is the unique GSM serial code that can be
extracted through android applications. IMEI is typed
by the manufacturer on the GSM module and can be
used as the in-bus unit serial number.
This proposed method gives ease for remote and
flexible control and management of all busses in the
designed system. All buses in the designed system
remotely load and save the route stations data which
gives the following privileges:
Reducing sever processing overhead as the
calculation of the bus station zone is done in each
bus through in-bus unit.
Optimizing the use of the network capacity as the
announcement and display of the stations through
in-bus display interface and audio system is done
automatically through the in-bus unit.
Overcome problems due to network connection
failure as in-bus units, in this case act as a stand-
alone system that can announce and display the bus
route stations directly as the processing is done
through the in-bus unit.
Sending bus periodic package frame (explained
below) to the sever directly as the bus enters a station
without waiting for the fixed periodic delay which
could result is bad system accuracy (bus can enter
and leave the station before the next periodic frame).
This is done as the calculation of the bus station zone
is done automatically via the in-bus unit.
In the beginning of operation the route stations of
each bus is loaded remotely using the following bus
registration request frame.
3.1.2 Bus Route Frame
This frame is sent to the bus either as an answer to
request due to start of operation bus request as shown
in the previous section or directly from the sever in
case of admin request of bus route change (i.e. the bus
route is changed remotely according to admin
requirements). Bus route frame given below contains
all bus route stations data; namely; stations
coordinates (longitude, latitude), names, and audio
codes.
Figure 5: Bus route frame.
3.1.3 Bus Periodic Frame
These periodic packets are sent from bus to server
with constant delay, unless bus enters a station zone.
The periodic packets are sent directly without delay
within station zone. This frame is used to manage
buses and process and calculate the bus arrival time.
The following frame shows the designed bus periodic
packet format example sent from the buses to the
server. and table 1 shows each field indication and size
of each field.
B1,I352134010613025,s00064*{103032.000t,A,3002.6816
,N,03119.3300,E,45.98v,8S, 062000.000 ,001#
Table 1: Bus periodic frame packet fields.
Field & Length (Byte) Indication
B1 Start of Packet / Bus Number
I352134010613025
Identification number of GSM
module
s00064 packet sequence
*{ start of GPS data
103032.000t Time
A (or V)
Status: data valid (A) or not valid
(V),
(valid if number of satellites ≥ 3)
3002.6816,N North (Latitude)
03119.3300,E East (Longitude)
45.98v Velocity
8S Number of satellites
062000.000 Time2: time of first station in Route
001 Audio Code
# End of Packet
3.1.4 Connection between Server and
Stations
The connection between stations and server is
constructed via web page design application. The
server can detect each zone of station and
automatically open the web page of this station to
display the prediction times of busses of this station.
Using this type of connection, we didn’t need and
extra connection between server and stations as
connection between buses and servers.
4 PROPOSED SYSTEM UNITS
The proposed bus and station units can be a hardware-
based unit or Android-based unit. The system based
hardware is divided into two entities; one in the
moving buses and one at the Bus station. The exact
functions performed by the In bus unit are different
from those performed by the Bus station unit.
VEHITS2015-InternationalConferenceonVehicleTechnologyandIntelligentTransportSystems
14

4.1 In-Bus Unit
The "In-Bus Unit" basic function is tracking the bus
during motion by sending periodic messages (every 30
seconds) to the main processing server, including its
new location; unit is divided to sub-units as shown in
Figure 6, where the display system is optional for the
In-Bus unit. Figure 7shows our In-Bus unit which
fully designed and implemented at NTI by the project
research team.
Operation of In-Bus Unit:
Main controller communicates with GSM/GPRS via
AT commands. The GSM/GPRS module is
configured to define the mobile service provider
access point, connection selection (TCP/IP), and
server IP address and port. Each unit has a unique ID
which is the GSM/GPRS module IMEI (International
Mobile Equipment Identity). The ID is sent by the In-
Bus Unit after connection with server is established.
For a first time attachment on the system network,
the main processing server will send all information
about the route which this bus belongs to including an
ordered list of the coordinates of all bus station on the
route; the microcontroller will save this information in
the main controller ROM for further calculations.
GPS module scans the satellites and finds the real-
time coordinates then these coordinates are compared
with the pre-stored coordinates of the respective bus
stations. If the coordinates match, the result is shown
as Station Name on LCD display and also
announcement using the speakers. At the same time
these coordinates send to the main processing server
using GPS/GPRS module.
Due to the problems that have been noticed due to
GPRS link failure according to signal coverage which
required the use of dual SIM card holder controller
design to switch between different GSM service
providers in case of link failure
Figure 6: Block Diagram of in-bus unit.
Figure 7: In-Bus Unit.
4.2 Bus Station Unit
The "Bus Station Unit" is installed inside public bus
stations to display a list of the new arriving buses and
the expected time to arrive at. This list is received from
the main server after gathering information from the
bus fleet and making prediction calculations. The unit
is divided to sub-units. The Bus station Unit and the
In-Bus Unit are the same; nevertheless the In-Bus Unit
has GPS and the announcement system circuits. The
main processing server can send the arriving buses list
to the concerned station after registering its IMEI
number.
5 SYSTEM BASED ANDROID
MOBILE APPLICATION
a new features was added to the system by developing
In-Bus and station units redesigned based on Android
mobile application. In general, data communication
between electronic android units in buses, stations,
and servers in "Central Room" uses TCP/IP suite
which run over GPRS/UMTS mobile operator
network. The following subsections show how re-
implement system based android application.
5.1 GPS Implementation on Android
GPS
Location-based services or LBS refer to 'a set of
applications that exploit the knowledge of the
geographical position of a mobile device in order to
provide services based on that information.
LBS can be classified in three categories: Public
Safety / Emergency Services, Consumer Services and
Preferred Location Search.
There are two methodologies to implement LBS
on android applications:
To process location data in a server and to forward
the generated response to the clients.
To find location data for a mobile device-based
application that can use it directly.
DesignandImplementationofTransportationManagementSystem
15

The location of Android unit can be computed by
3 methods:
1) Mobile Phone Service Provider Network-
Using cell ID.
2) GPS Satellites
Using GPS satellites system.
3) Assisted-GPS (A-GPS)
Integrates the mobile network with the GPS to
give a better accuracy.
In Android, location-based services are provided
by the Location Manager class located in the android.
location package. Using the Location Manager class,
we can obtain periodic updates of the device's
geographical locations as well as fire an intent when it
enters the proximity of a certain location. Location-
based service is another key functionality that gets
used in smart phone applications. It is often combined
with maps to give a good experience to the user about
their location [18].
5.2 Display Android Phone's Screen on
Monitors
A popular feature on several Android phones is the
ability to connect the phone to an High Definition
Multimedia Interface (HDMI) monitor. The phone
must have an HDMI connector, and need to buy an
HDMI cable.
6 PROPOSED ARRIVAL TIME
PREDICTION
This proposed transportation system presents an
effective method to predict the bus arrival time at
individual bus stops along a service route. This
method depend on famous methods in prediction
domain, Kalman filter and Neural Network. The
proposed method combines Kalman Filter (KF) that
fuses prediction calculations with current GPS
measurements with a neural network (NN) that infers
decision rules from historical data.
The proposed algorithm relies on real-time
location data (Kalman filter) and takes into account
historical travel times (Neural Network) as well as
temporal and spatial variations of traffic conditions as
presented in paper (M. Zaki et al., 2013).
Although the two separated algorithms gave us
accepted results as shown in paper (M. Tantawy and
M. Zorkany, 2014), but still the two algorithms work
individually.
In this paper, we proposed a modified technique to
predict bus arrival time depending on the two
algorithms (NN & KF) simultaneously to take
advantage of historical data (NN) with current data
(KF). In the proposed method, we used three available
previous data from the buses in the same period and
the same link and the fourth data from learned neural
network to predict time using Kalman filter algorithm.
According to Kalam filter prediction algorithm
[11-12], the prediction time t(k+1) depends on four
pervious data (t(k), t(k-1), t(k-2), t(k-3))
t(k+1)=f ( t(k), t(k-1), t(k-2), t(k-3) ) (1)
In the proposed method, we replace t(k-3) by
estimated time computed from neural network. and the
equation (1) will be:
t(k+1)=f ( t(k), t(k-1), t(k-2), t(NN) ) (2)
As well as if the previous data are not available, we
can replace it by learned neural network in Kalman
filter algorithm. For example, if two previous data are
available only, we use the other two data from learned
neural network as shown in equation (3).
t(k+1)=f ( t(k), t(k-1), t(NN), t(NN) ) (3)
7 SIMULATION RESULTS
7.1 Network Traffic
The network traffic is estimated mainly as a result of
bus periodic frame (from bus to sever). All other
frames do not represent any load on the network
because they will be sent either at the beginning of the
operation or in case of changing bus route. The effect
of this frame on network traffic is given as the
following. According to the periodic packet format
from bus to server, the total traffic per bus per packet
is given by:
Total traffic per bus per packet = IP packet
payload + IP packet header
(4)
IP packet payload = Total application packet
length + TCP segment header
(5)
Where:
IP packet header = 20 bytes
Total application packet length = 91 bytes (Table
(1))
TCP segment header = 20 bytes
As IP packet payload should be divisible by 8, extra
zero pads are added (in our case = 1 byte is added)
Then: The Total traffic per bus per packet = 132 byte
Figure 8 and figure 9 show the average IP traffic
transmitted from one bus varying with the inter-
VEHITS2015-InternationalConferenceonVehicleTechnologyandIntelligentTransportSystems
16
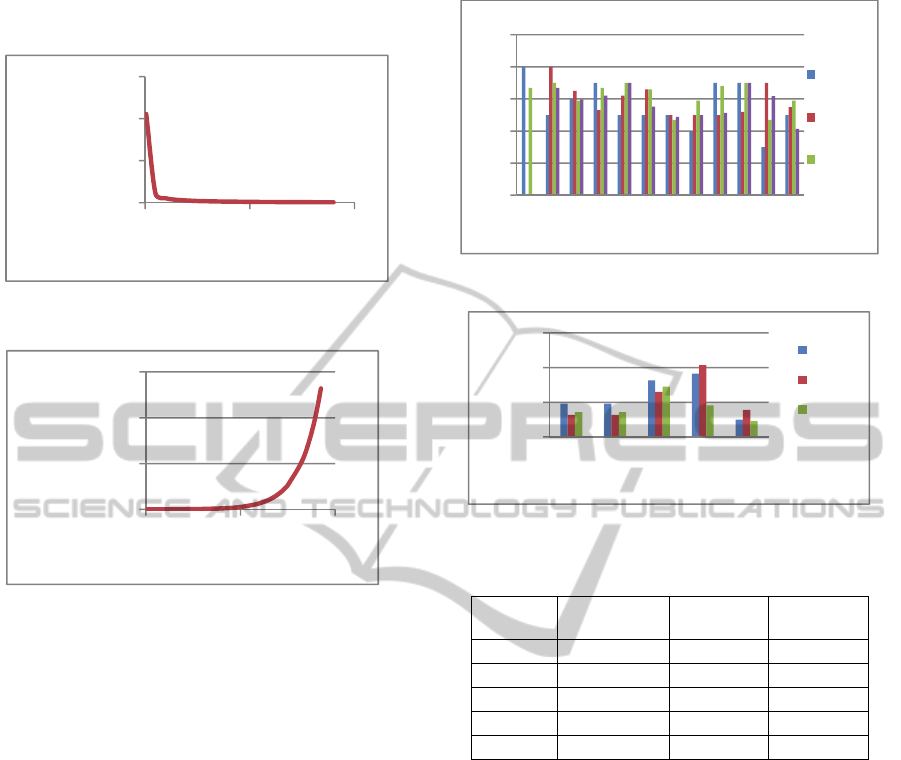
transmission period and the total traffic received at the
server versus number of buses respectively.
Figure 8: Average IP traffic transmitted from one bus vs.
duration between IP packets transmission.
Figure 9: Total traffic received at the “Central Room” server
vs. number of buses.
It should be noted that the real data traffic will be
slight higher than that in Figure 6 and figure 6 due to
GSM/GPRS overhead and the acknowledge packets
transmitted back from the server to the bus.
7.2 Testing Bus Arrival Time
Prediction Technique
The proposed prediction time algorithm was tested
based on the available data, which was collected
during more than three months for units have been
installed in three Busses of the lines of NTI fleet (Our
Institute) in different three routes (about 18 stations).
Taking into account that these lines in different areas
to cover different cases of traffic in Egypt.
For Example, figure 10 shows prediction arrival
time calculation result between two stations "Ahmed
badawy and Massara station" using Kalman Filter,
Neural Network and Hybrid method. Where, RMSE
"Route mean square error" =1.28 mint for Neural
network, 1.92 for Kaman filter and 1.44 for hybrid.
A comparison between arrival time prediction
algorithms (Kalman filter, neural network and Hybrid
NN&KF) for some stations is summarized in Table 2
and figure 11.
Figure 10: Arrival Time Prediction between two stations.
Figure 11: RMSE for KF, NN and Hybrid NN&KF.
Table 2: RMSE (Root-Mean-Square Error).
Station
No
KF NN Hybrid
1
1.92 1.28
1.44
2
2.65 1.96
2.20
3
3.26 2.61
2.9
4
3.66 4.14
3.29
5
0.99 1.56
0.92
From the field test results using NTI fleet (low trip
rate), it can be noted that calculating the arrival time
using neural network algorithm gives us better results
than Kalman filter algorithm in most different
conditions. Nerveless Kalman filter has show
negligible improvement than neural network
algorithm in some stations under test. In case of heavy
daily trip rates the kalman filter algorithm shows
better results.
8 CONCLUSIONS
This paper presents the Transportation Management
system. The system was designed and implemented
based on Hardware units and redesigned using
Android based mobile application.
Based on the collected data from buses and via
analyzing road condition, accurate arrival times
computed (Via Neural network / Kalman Filter) at the
0
2
4
6
8
10
123456789101112
RMSE(minutes)
TripNo.
Real
Time
KFTime
NN
Time
0
2
4
6
12345
RMSE(minutes)
LinkIndex
KF
NN
Hybrid
0
2000
4000
6000
1 100 10000
TotalTrafficreceived
fromthebuses(kbps)
NumberofBuses
0,0
500,0
1000,0
1500,0
0100200
TotalTrafficTransmitted
fromonebus(bps)
DurationbetweenIPpackettransmission
(sec)
DesignandImplementationofTransportationManagementSystem
17

server and transmitted to all relevant stations. The
network traffic is estimated mainly as a result of bus
periodic frame (from bus to sever). All other frames
do not represent any load on the network because they
will be sent either at the beginning of the operation or
in case of changing bus route. A Comparison between
implementing transportation system based on
hardware unit viruses Android unit are presented. The
system was tested using NTI Fleet for a field test.
From the field test results using NTI fleet (low trip
rate), it can be noted that calculating the arrival time
using neural network algorithm gives better results
than Kalman filter and hybrid algorithm in most
different conditions. Hybrid neural network with
Kalman filter give better results than Kalman filter. In
case of heavy daily trip rates the hybrid algorithm
shows better results
ACKNOWLEDGMENT
This work concern is a part of research project called
Transportation Management and User Awareness (TMUA)
that financially supported by the National Telecom
Regulatory Authority (NTRA) of Egypt. The project team
are: Prof. A. Ammar, Prof. E.M.Sad, Prof. I.Ashour,
Ass.Prof. M.Tantawy, Dr. M.Zorkany, Dr. M.Shiple, Eng.
A.Nabeil, Eng. M.Sami, N.A.Nagdy and Eng. A.Hamdi.
REFERENCES
HAN, S., HUH, K. Monitoring system design for lateral
vehicle motion. IEEE Transactions on Vehicular
Techology. 2011, vol. 60,no. 4, p. 1394-1403.
DOĞAN, S., TEMIZ, M. S., KÜLÜR, S. Real time speed
estimation of moving vehicles from side view images
from an uncalibrated video camera. Sensors. 2010, vol.
10, no. 5, p. 4805-4824.
HICKMAN, J. S., HANOWSKI, R. J. Use of a video
monitoring approach to reduce at-risk driving behaviors
in commercial vehicle operations. Transportation
Research Part F-Traffic Pshychology and Behaviour.
2011, vol. 14, no. 3, p. 189-198.
QIN, K., XING, J., CHEN, G., WANG, L., QIN, J. The
design of Intelligent Bus Movement Monitoring and
Station Reporting System, In Proceedings of the IEEE
International Conference on Automation and Logistics,
Qingdao, China, September 2008, p. 2822-2827.
F. Li, Y. Yu, H. Lin, and W. Min. “Public bus arrival time
prediction based on traffic information management
system”. In Proceedings of IEEE International
Conference on Service Operations and Logistics, and
Informatics (SOLI), pages 336–341, 2011.
Pengfei Zhou, Yuanqing Zheng, Mo Li, " How Long to
Wait?: Predicting Bus Arrival Time with Mobile Phone
based Participatory Sensing", MobiSys’12,June 25–29,
2012, Low Wood Bay, Lake District, UK.
Dihua Sun, Hong Luo, Liping Fu, Weining Liu, Xiaoyong
Liao, and Min Zhao, “Predicting Bus Arrival Time on
the Basis of Global Positioning System Data”,
Transportation Research Record: Journal of the
Transportation Research Board, No. 2034,
Washington, 2007, pp. 62–72.
Manav Singhal, Anupam Shukla, “Implementation of
Location based Services in Android using GPS and
Web Services”, IJCSI International Journal of
Computer Science Issues, Vol. 9, Issue 1, No 2, January
2012, ISSN: 1694-0814.
Ruchika Gupta and BVR Reddy,” GPS and GPRS Based
Cost Effective Human Tracking System Using Mobile
Phones”,VIEWPOINT, Volume 2, No. 1, January-June
2011.
M. Zaki, I. Ashour, M.zorkany, B. Hesham,"Online Bus
Arrival Time Prediction Using Hybrid Neural Network
and Kalman filter Techniques," International Journal
of Modern Engineering Research (IJMER), Vol. 3,
Issue. 4, Jul - Aug. 2013 pp-2035-2041.
M. Tantawy and M. Zorkany, " A Suitable Approach for
Evaluating Bus Arrival Time Prediction Techniques in
Egypt ", Proceedings of the 2014 International
Conference on Communications, Signal Processing
and Computers.
AASHTO (American Association of State Highway and
Transportation Officials), "National Transportation
Communications for ITS Protocol NTCIP 9001 version
v04," July 2009.
Qusay H. Mahmoud. J2me and location based services.
2004. URL http://developers.sun.com/mobility/apis/
articles/location.
VEHITS2015-InternationalConferenceonVehicleTechnologyandIntelligentTransportSystems
18
