
A Flexible Architecture to Monitor Dynamic Web Services Composition
Flavio Corradini, Francesco De Angelis, Daniele Fanı’ and Andrea Polini
Computer Science Division, University of Camerino, MC, Camerino, Italy
Keywords:
System Integration, Service Oriented Architecture and Methodology, Web Services and Web Engineering,
SOA, Run-Time Monitoring, WS Choreography.
Abstract:
A Service Oriented Architecture aims to facilitate interaction of loosely coupled services in large-scale dy-
namic systems. Despite a decade’s active research and development, Web Services still remain undependable
(Bourne et al., 2012). In literature many proposals attempt to overcome interoperability issues, particularly
typical of not-orchestrated Web Service (WS) compositions. Although these techniques aid to discover poten-
tial interoperability mismatches, they do not fit well with flexibility and dynamism, desirable characteristics
e.g. in choreographies. Here unsafe run-time changes may compromise a correct execution. To support
such dynamism and to mitigate the effects of such failures, we propose a flexible architecture able to realize
dynamic WS compositions, supporting run-time monitoring and verification techniques. The technique we
chose is a novel run-time algorithm capable to predict potential failures that can happen in near future states
of a choreography. It admits an integration ”a-priori” and monitors the run-time services behaviour to provide
information about possible errors when these can happen.
1 INTRODUCTION
Nowadays software is not anymore a single artifact
that can be fully designed at design-time. Building
complex systems from scratch is a very costly effort
and often not successful. The current trend is to as-
semble a system similarly to a jigsaw puzzle. Once re-
quirements and policies are established, existing soft-
ware components are discovered and assembled to
reach the prefixed goal. But whereas jigsaw puzzle
pieces are made pluggable into each other by the same
company, the systems to be integrated rarely are. Uti-
lizing existing components means expecting that they
will safely interact with each other, even if made in-
dependently by different companies. When properties
as flexibility and dynamism are required, interoper-
ability issues become even more complicated. For
instance this is the case of SOA-based and Future
Internet-oriented applications (Baresi et al., 2006).
This kind of systems are made mostly by already ex-
isting WSs that provide just their public interfaces
over internet. They may come from partially un-
known third parties, thus further limiting the trust on
their correctness and unmalicious behavior.
Such complex systems made by composing WSs
as they were components, can be grouped in two
main categories: orchestrated and not-orchestrated.
In both of them, WSs are viewed as black-box compo-
nents that interact with each other to reach the system
goal. Briefly, an orchestration of WSs has one cen-
tral coordinator (orchestrator). It manages the mes-
sage exchange among the services following an ex-
ecutable business process. On the other hand, a not-
orchestrated service composition like a choreography,
focuses on the global protocol running between WSs
rather than on their local coupling. Each component
here knows requirements to interact with the others,
and covers just at run-time a pre-fixed role. Assum-
ing that a set of composable WSs is available at run-
time in a system, they should interact on their own
to reach the choreography goal. It is easy to see the
additional effort required to grant robustness and safe
interactions in a system without a central point of co-
ordination. However, the lack of centralized coordi-
nation permits a more flexible system, where compo-
nents can be dynamically bounded at run-time to a
choreography role. This means that a WS could po-
tentially enter, leave or be substituted while the whole
system is being operated.
In this setting two main problems limit the pos-
sibility of software-quality related activities to oper-
ate in advance. One is the possible late integration of
services in dynamic compositions, that makes it dif-
ficult to check the correctness of the resulting com-
position before the execution. On the other hand,
the number of all the possible configurations for such
64
Corradini F., De Angelis F., Fani’ D. and Polini A..
A Flexible Architecture to Monitor Dynamic Web Services Composition.
DOI: 10.5220/0005444800640072
In Proceedings of the 11th International Conference on Web Information Systems and Technologies (WEBIST-2015), pages 64-72
ISBN: 978-989-758-106-9
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

systems may be unmanageable according to (Morin
et al., 2009), and it may become impossible to val-
idate all of them in advance. Moreover not all the
services expose their internal behavior, so projections
or empirical behaviors are assumed for the compo-
sition validation. This can lead to unsafe run-time
changes that may imply interoperability issues, since
new interactions may emerge. In such a context, tradi-
tional testing and static analysis strategies may not be
enough. In literature many proposals attempt to over-
come interoperability issues. Many of them focus on
the correct-by-construction strategy like (Autili et al.,
2015), or on static verification like choreography real-
izability (Basu et al., 2012) and protocol compatibil-
ity (Elia et al., 2014). Although these techniques aid
to discover potential interoperability mismatch, they
do not fit well with characteristics like flexibility and
dynamism of WS compositions. Moreover, often they
are too time-expensive, especially with the emergence
of short living compositions. In this scenario new ver-
ification techniques are emerging, that take advantage
of both design- and run-time verification activities.
Nevertheless, the underlying architecture must sup-
port them, in addition to the high dynamism of the
system.
According to Cassandra (De Angelis et al., 2014),
we think that it could be more fruitful to permit the
services integration ”a-priori”, and then provide dy-
namic run-time validation and verification activities.
Cassandra proposes a novel run-time monitoring and
verification algorithm in order to detect possible fail-
ures in near future states of a choreography. The strat-
egy identifies the current execution state, and then
drives the construction of predictions that look to a
number k of steps ahead of the current execution state.
For this purpose a flexible architecture is needed, able
to manage frequent run-time changes and that allows
a verification strategy to monitor the system knowing
the current execution state.
The goal of this research paper is to propose an
architecture, hidden from the services point of view,
able to manage dynamic WS compositions as chore-
ographies, and to support run-time verification tech-
niques like the above-mentioned Cassandra approach.
This paper contributes to the state-of-the-art in on-
line failure prediction of service composition in this
respect: i) it introduces an architecture able to sup-
port integration-failures prediction at run-time in dy-
namic SOA systems; ii) it explains why existing ser-
vices have not to be modified with our approach, ex-
ternalizing message handling and monitoring; iii) it
provides a concrete implementation of the approach,
using Cassandra as assessment.
Section 2 provides some introductory material on
Interface Automata, used to explain WSs composi-
tion. Then the proposed architecture is explained in
3. Section 4 introduces the Cassandra approach, since
it has been used as verification technique in our con-
crete implementation described in Section 5. Related
work are discussed in Section 6 while Section 7 con-
cludes the paper and provides a list of future research
directions.
2 THEORETICAL BACKGROUND
This section provides a theoretical background to ex-
plain what is a WS composition and problems that
may occur. To ensure that two WSs can interact in
a composition, as defined later in this section, their
internal behavior must be composable. We can con-
sider a WS behavior as an Interface Automaton (IA),
introduced in (de Alfaro and Henzinger, 2001), i.e.
a light-weight formalism for modeling temporal as-
pects of software components interfaces. IA interact
through the synchronization of input and output ac-
tions, and asynchronously interleave all the other (i.e.
internal) actions. Below we provide some basic IA
definitions.
Definition 1. An interface automaton is a tuple P =
hV
P
, V
init
P
, A
I
P
, A
O
P
, A
H
P
, T
P
i where:
• V
P
is a set of states and V
init
P
is a set of initial states
that contains at most one state.
• A
I
P
, A
O
P
and A
H
P
are mutually disjoint sets of input,
output and internal actions. We define A
P
= A
I
P
∪
A
O
P
∪ A
H
P
.
• T
P
⊆ V
P
× A
P
×V
P
is a set of steps.
We say that an action a ∈ A
P
is enabled at a
state v ∈ V
P
if there is a step (v, a, v
0
) ∈ T
P
. A
I
P
(v),
A
O
P
(v) and A
H
P
(v) are the subsets of input, output and
internal actions that are enabled at v and A
P
(v) =
A
I
P
(v) ∪ A
O
P
(v) ∪ A
H
P
(v) is the set of action enabled
at v. A key feature is that IA are not required to be
input-enabled, i.e. we do not assume that A
I
P
(v) = A
I
P
for each v ∈ V
P
. The inputs in A
I
P
\A
I
P
(v) are called
illegal inputs at v. The set of input steps is the subset
of steps T
I
P
= {(v, a, u) ∈ T
P
|a ∈ A
I
P
} ⊆ T
P
. Simi-
larly we define the sets T
O
P
and T
H
P
of output and in-
ternal steps. Moreover, a state u is reachable from
v if there is an execution sequence, namely an al-
ternating sequence of states and actions of the form
v = v
0
, a
0
, v
1
, a
1
, . . . , v
n
= u where each (v
i
, a
i
, v
i+1
) is
a step.
Two IA are mutually composable if their set of ac-
tions are disjoint, except that some input actions of
one automaton can be output actions of the other one.
AFlexibleArchitecturetoMonitorDynamicWebServicesComposition
65

Definition 2. Two interface automata P and Q are
mutually composable (composable, for short) if A
H
P
∩
A
Q
= A
H
Q
∩ A
P
=
/
0 and A
I
P
∩ A
I
Q
= A
O
P
∩ A
O
Q
=
/
0.
Essentially, P and Q are composable whenever they
only share some input and output actions and, hence,
shared(P, Q) = A
P
∩ A
Q
= (A
I
P
∩ A
O
Q
) ∪ (A
I
Q
∩ A
O
P
).
If two IA P and Q are composable, their prod-
uct P ⊗ Q is a IA which set of states is V
P
×V
Q
and
that will synchronize on shared actions, while asyn-
chronously interleave all other (i.e. internal) actions.
Since P and Q are not required to be input-enabled,
their product P ⊗ Q may have one or more states
where one component produces an output that the
other one is not able to accept. The states where this
happens are called illegal.
Definition 3. All pairs (v, u) ∈ V
P
×V
Q
where there
is an action a ∈ shared(P, Q) such that either a ∈
A
O
P
(v)\A
I
Q
(u) or a ∈ A
O
Q
(u)\A
I
P
(v), are called ille-
gal.
Illegal states represent error states that the com-
posed system should not be able to reach. Indeed,
two interface automata P and Q can be used together
if there is at least a legal environment, i.e. an environ-
ment that can prevent P ⊗ Q from entering its illegal
states.
We assume that each WS in a choreography pro-
vides a run-time model definition IA-equivalent, de-
scribing its behavior and how it interacts with the en-
vironment. In some real context this assumption can
be judged a bit strong, but in literature it is easy to
find techniques to derive such models. One of them,
suggested by (Shoham et al., 2008), is a client-side
mining of specifications based on static code analy-
sis. Another technique could be the use of the Test
Suites proposed by (De Angelis et al., 2013). They
are used to verify if a service is able to cover a spe-
cific role in a choreography. If that is the case, we
can consider the projection of that role as the run-
time model of that service. However the real behavior
could be more complex than the provided model, so
unpredictable interactions could emerge, visible only
monitoring at run-time. The architecture we propose
in the next section supports both real-time monitoring
and failure prediction techniques based on provided
run-time models.
3 A FLEXIBLE ARCHITECTURE
This section introduces the structure of the architec-
ture we propose. Its aim is to allow safer services inte-
gration ”a-priori” in choreographies, since supported
monitoring and predictions techniques will discover
potential errors in time, without modifying the inter-
nal business logic of the participating services. The
architecture adopts the Enterprise Service Bus (ESB)
design pattern to make heterogeneous services ex-
change messages, while an integration framework is
used to implement the choreography specification.
We assume that each participant service can be
explicitly added and removed from the ESB registry.
As explained later in this chapter, once added, each
participating service will be bound to an ESB bun-
dle according to the role it covers. Such a bundle
will address messages and notify the monitoring al-
gorithms, externalizing also error handling from the
real services. We refer to the ESB as a single logic
unit. However it could be distributed among sev-
eral implementation to support scalability (Hanu-
mantharayappa, 2014).
For our concrete architecture implementation, we
chose ”ServiceMix” (SMX) as ESB provider and
”Camel” as integration framework. After a brief in-
troduction to the just mentioned technologies, we de-
scribe the proposed architecture analyzing our con-
crete implementation.
3.1 Technological Background
3.1.1 Apache ServiceMix
Apache ServiceMix (http://servicemix.apache.org) is
a flexible, open-source integration container. It pro-
vides a complete Enterprise Service Bus (ESB) pow-
ered by OSGi. An ESB is a software architecture
model used to allow the communication between mu-
tually interacting software applications in a service-
oriented architecture (SOA). As opposed to the client-
server model, the ESB promotes agility and flexibil-
ity. SMX can be run as a standalone provider or as
a service within another ESB. It provides messaging,
routing and Enterprise Integration Patterns (EIP) with
Apache Camel, introduced in the next subsection.
SMX is built on top of Karaf (http://karaf.apache.org),
so it can be used also as OSGi container. We use this
feature to install OSGi bundles to extend its features
and routing rules.
3.1.2 Apache Camel
Apache Camel (http://camel.apache.org) is an open-
source Java framework that allows easier integrations,
implementing the standard EIPs using Java, XML,
or Scala. It aims to address the problem of deal-
ing with the specifics of applications and transports,
and the problem to use a good solution to integra-
tion problems. Camel uses its components, that pro-
vide an Endpoint interface, to add connectivity to
WEBIST2015-11thInternationalConferenceonWebInformationSystemsandTechnologies
66
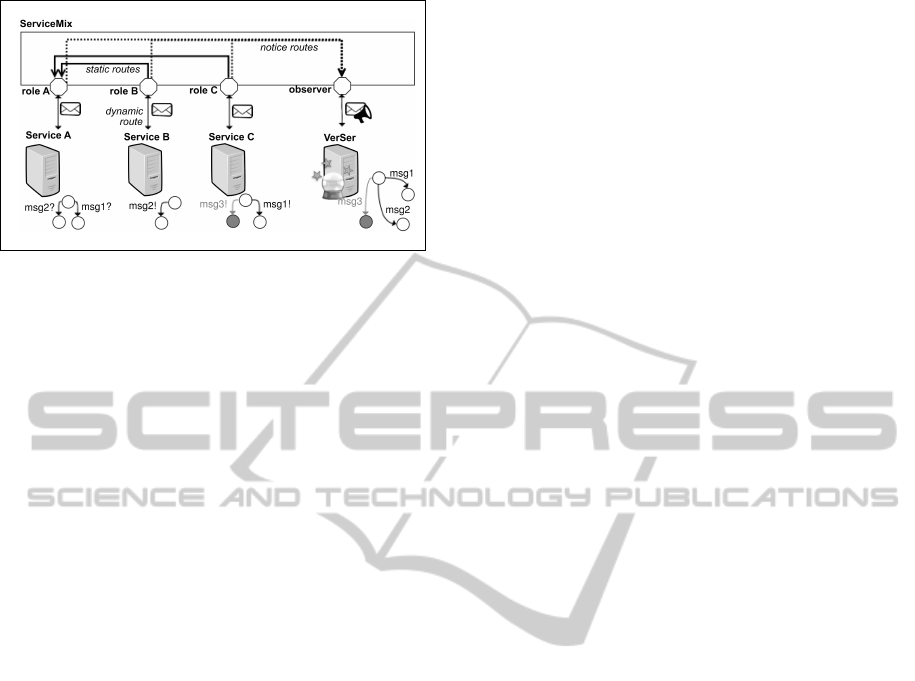
Figure 1: Implemented architecture.
different systems and different transports (http, rest,
soap,...). To manipulate and mediate messages in be-
tween endpoints, Camel uses EIPs defined as proces-
sors. To wire processors and endpoints together, mul-
tiple DSLs languages can be used, such as Java, Scala
or Spring.
3.2 The Architecture
The solution we propose in this paper, aims to build
a flexible architecture able to support the execution
of dynamic choreographies with real-time monitoring
to discover unpredictable messages. Furthermore, it
supports failure-predictions techniques based on pro-
vided WSs run-time model.
3.2.1 Realize a Choreography
We use SMX as the core component. It will be re-
sponsible to address the messages, connect the ser-
vices and notify the verification algorithms. In our so-
lution SMX is a standalone provider, accessible from
all the potential participants of a choreography. Due
to its OSGi extensible structure, together with Camel
routing capability, it can realize a choreography spec-
ification. A choreography, regardless the language
used to model it, specifies the roles and the commu-
nication rules. We represent roles in SMX with OSGi
bundles we call role-bundle. So given a choreogra-
phy, for each role a relative role-bundle is created and
installed on SMX. The installation of bundles can be
performed even at run-time. For now we can consider
the role-bundles just as reference to roles, since each
of them has a defined endpoint. They do not have a
business logic, that instead is implemented by the ser-
vice. Actually we will see later that the bundles can
be used to perform actions such as transforming mes-
sages and sending notifications.
When a service enters in a choreography, we as-
sume it provides its behavior (used by the prediction
activities) and its endpoint to the ESB, in our case
SMX. A route then is created at run-time between
that service and the role-bundle relative to the role
it covers. We call these routes dynamic, since they
can change during a choreography execution. A dy-
namic route connects the role-bundle to the up-to-date
endpoint of the current service performing that role.
However, even if several different services can cover
the same role over time, the endpoint of the relative
role-bundle remains unchanged. The Fig. 1 shows the
described architecture, representing the OSGi role-
bundles as small octagons plugged into SMX.
All the messages of a service will be sent to the
endpoint of the role-bundle relative to the role the ser-
vice covers through dynamic routes. Services are not
aware of the architecture neither of the static routing
rules nor the endpoints of the other services. Static
routes are those that implement the choreography
specification, and they do not change along the chore-
ography execution. They connect the role-bundles to
each other, and address the messages following the
choreography rules. When a role-bundle will receive
a message from another role-bundle through a static
route, it will send the message to the receiver service
through a dynamic route.
The distinction between static and dynamic routes
is just logic, they are defined in the same way and they
are hidden from the outside. In our case, using Camel,
they can be written in several languages including
DSL-Java and Spring-XML. This allows to easily de-
rive routes from a choreography, and easily update dy-
namic routes at run-time, according to current avail-
able services. In addition to routing, Camel allows
also to handle messages before redirecting them to the
receiver. Messages can be parsed and transformed,
making interoperable even services implemented in
different ways.
3.2.2 Verification Techniques Integration
We saw how a choreography could be realized with a
very flexible and dynamic architecture. Now we are
going to see how to use verification techniques like
real-time monitoring and failure prediction. In our
scenario we consider to have verification algorithms
implemented in a remote service, we call VerSer,
linked to an OSGi bundle of SMX, just like the other
participant services. We call observer the bundle
linked to VerSer, as shown by Fig. 1. To improve
performance and to reduce latency, VerSer algorithms
could also be implemented as an OSGi bundle, be-
coming part of SMX. We prefer to keep VerSer de-
tached from SMX to be more flexible, and to be ready
for distributed versions.
In order to make predictions, VerSer must be
aware of the services behavior and of the messages
AFlexibleArchitecturetoMonitorDynamicWebServicesComposition
67

actually exchanged by each other. For this purpose,
the role-bundles must notify the observer about the
messages received from the participating services.
The observer in turn notifies VerSer making it able
to monitor the message exchange. Besides the ex-
changed messages, also actions like ”add” or ”re-
move” of a service must be notified to VerSer.
In our proposed architecture, each participant
must provide its Interface Automaton equivalent run-
time model. When the service enters in the system, its
run-time model will be sent to VerSer using a special
message. Likewise, when a service leaves the chore-
ography, a special message is sent to VerSer in or-
der to update its prediction mechanisms. Notifications
are automatically sent by role-bundles to the observer
through camel routes we call notice-route, just as the
other routing rules. The notice-routes are represented
in Fig. 1 by dashed arrows. This solution permits par-
ticipating services to ignore the verification mecha-
nisms. If VerSer predicts a potential future failure, it
will notify the concerned role-bundle. This permits to
externalize error-handling techniques, implementing
them in the role-bundles without modify the existing
services.
Referring to the example of Fig. 1, the use of
the routes to send the ”msg1” from the service C
could be the following. When the WS C wants to
send the ”msg1” to A, the message is sent to the
fixed endpoint of role-bundle C. Then, the message
is forwarded to the observer through the notice route
RoleC→Observer. At this point the Observer redi-
rects ”msg1” to VerSer through the dynamic route
Observer→VerSer, so that the latter can monitor the
system and update its prediction. Then the prediction
is sent back to the fixed endpoint of the Observer, that
redirects it to the concerned role-bundle C. If no fail-
ure will be predicted, i.e. no protocol mismatches will
be expected performing ”msg1”, the message will be
sent to RoleA through the static route RoleC→RoleA.
In turn, the message will be forwarded through the dy-
namic route RoleA→ServiceA.
To assess our architecture we use cassandra, de-
scribed in Sec. 4, as verification technique to be de-
ployed as VerSer.
4 CASSANDRA
To test our architecture with real monitoring and pre-
diction activities, we chose CASSANDRA (De Ange-
lis et al., 2014), an approach to forecast possible fail-
ures in the dynamic integration of software compo-
nents. The usual approach to the modeling of a com-
ponent that interacts with other components is pes-
simistic; the basic assumption is that the environment
can behave as it likes and that two components can
be composed if no environment can lead them into
an error state. Cassandra approach is optimistic, per-
mitting services integration ”a-priori”, and then pro-
viding run-time monitoring and verification activities.
It explores design-time system models together with
events observed at run-time to check if a possible ille-
gal state is reachable. The exploration strategy builds
a global design-time model (exploration tree) look-
ing just k steps ahead starting from the current system
state monitored at run-time. In this paper we assume
that the value of k is defined by the user. In order to
make near future prediction, Cassandra should have
an up-to-date view over the participating services and
the exchanged messages. For example, if a participant
leaves the choreography at run-time, the notification
of the ”remove” will allow Cassandra to update the
illegal states of the exploration tree.
4.1 Cassandra Overview
This online failure prediction algorithm relies on a
specification of the component behaviour based on
the IA formalism shown in Sec. 2. The algorithm
suitably composes the specifications of those compo-
nents under execution. Nevertheless, instead of using
the classical composition operator, Cassandra uses a
slightly different one more suitable for the online pre-
diction of failures in a dynamic environment. Accord-
ing to this composition operator any pair of compo-
nents sharing a set of I/O actions can be integrated.
Then, the composed automata is navigated by look-
ing ahead to the current execution state. It is the task
of the failure prediction approach to check whether
the system is approaching an illegal state, and so to
inform a possible failure avoidance mechanism that
will possibly take care of repair actions. In the Cas-
sandra approach, an illegal state corresponds to an in-
tegration failure by any path shorter than k steps and
originating in the current state. In a sense, we assume
that an illegal state can be reached as consequence of
a wrong invocation/message done by one component
on a component that either is not willing to accept it
in the current state or does not exist at all.
Fig. 2 shows a client-server scenario used to ex-
plain the Cassandra algorithm. The sender asks the
server to write or read on receiver’s file. The services
cannot always correctly cooperate since they make
different assumptions on their respective behaviour.
The sender assumes that after a successful opening,
the resource can be used through the server without
receiving any failure. The server may connect with
the receiver through a not reliable medium, and can
WEBIST2015-11thInternationalConferenceonWebInformationSystemsandTechnologies
68
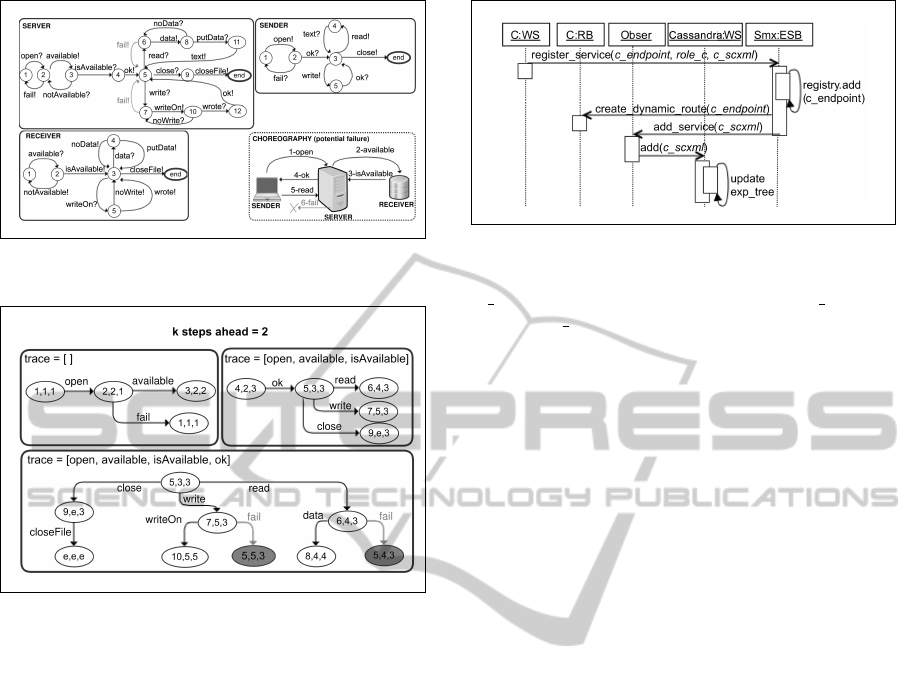
Figure 2: Scenario client-server.
Figure 3: Cassandra interaction tree.
return a failure. According to the standard IA the-
ory the two automata cannot be composed, since the
server may send a f ail message while the sender is
not able to receive it. However Cassandra let them
interact, since if no connection failures occur, the
sender will successful access the receiver’s file. A
snippet of the exploration tree derived by Cassandra
is shown by Fig. 3, assuming a prediction of 2 steps
ahead. The color of illegal states is red.
4.2 Cassandra as VerSer
Cassandra can be integrated in our architecture as the
VerSer, creating a dynamic route to the observer. As
Cassandra does, we assume the services behavior IA-
equivalent, are described by a SCXML (State Ma-
chine Notation for Control Abstraction) specification,
i.e. a general-purpose event-based state machine lan-
guage. When a service participate in a choreography,
it is added to the SMX registry and a dynamic route
is created towards the relative role-bundle. Moreover,
a special message is sent to Cassandra, notifying the
”add” of the service and providing its SCXML spec-
ification. This process is showed by Figure 4, where
the service ”C” referenced from Fig. 1 is going to
participate in a choreography, providing its endpoint
Figure 4: Service registration.
(c end point), the role it wants to cover (role c) and its
behavior (c scxml). In the same way, when a service
is explicitly removed from the SMX registry, a special
message is sent to Cassandra which updates its explo-
ration tree with new illegal states. Services can be
added and removed even at runt-time, during a chore-
ography execution. The characterization of the states
in the exploration tree will result from the observed
events and the actual configuration of the system to
make predictions used by a fault management strat-
egy or used for logging and analysis purpose without
altering the services implementation. During the exe-
cution of the system, at logical level each participant
asks Cassandra for a prediction before sending a mes-
sage to the receiver service. The prediction is returned
to the participant synchronously to the system execu-
tion and the management of the possible futures is left
to the service. Actually this strategy is implemented
by routing rules and role-bundles behaviors. Indeed,
each role-bundle will redirect messages from services
to the observer through the notice routes asking for
a prediction. Once the prediction is available, an an-
swer is sent back by the observer. The role-bundle
then, if no illegal states are reached by the exploration
tree, it will deliver the message to the receiver role
through the static route, or it will handle the potential
failure otherwise.
This strategy allows to check in advance if an ac-
tion can be performed safely, i.e. it does not lead to a
failure. It checks that the receiver service is active and
its current state is able to accept that message from the
sender. This strategy increases latency of the system,
but grants system consistency and safer interactions.
As stated in (De Angelis et al., 2014), the complex-
ity of Cassandra failure prediction algorithm mainly
depends on the size (in terms of number of nodes and
edges) of the exploration tree. Its creation and its ex-
ploration have a time complexity in O(N
k
), so it in-
creases according the number of steps to forecast in
the future (which relates to the value of k), rather than
the number of total interactions in the system.
AFlexibleArchitecturetoMonitorDynamicWebServicesComposition
69
5 ASSESSMENT
This section analyzes a scenario we used as use-case
for assessment of Cassandra with the architecture we
proposed. For the sake of readability we used a very
simple scenario, with the intent to show the feasibil-
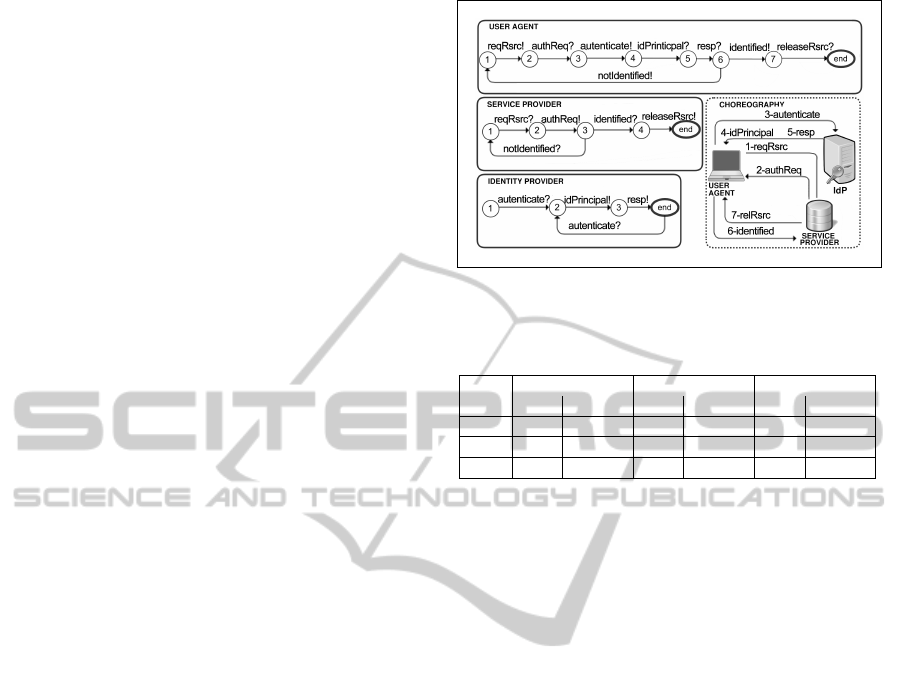
ity of the architecture. The scenario models a Single-
Sign-On choreography, with three roles: user agent
(Usr), Identity Provider (IdP) and Service Provider
(SP). The Usr requests the access to a resource to the
SP, that in turn asks to the Usr an authentication to-
ken. Then the Usr asks the IdP to be authenticated.
If the user is successful authenticated, the token will
be sent back in the response. Only at this point the
Usr can access to the SP resources. This scenario is
illustrated by Fig. 5.
We assume that Cassandra is aware of the services
behavior, represented by SCXML files. Though our
solution is independent from the services implemen-
tation, we chose to implement services as Java remote
Akka actors. Akka (http://akka.io) is an open-source
actor-based toolkit and runtime supporting Java and
Scala. It simplifies the construction of concurrent
and distributed applications. An actor in Akka is the
smallest unit of an application. It is a container for
State, Behavior and Mailbox. A State, similar to an
explicit state machine, is used to compare the Cassan-
dra prediction with the services real current state. The
Behavior is the action to be taken, according to the
current state and the message received. The Behav-
ior is defined with an event-based approach, making
actors interact through asynchronous messages, en-
queued in their Mailboxes. Akka provides also self-
healing techniques if an actor reaches an inconsistent
state, recovering a previous state. We chose Akka
because of the features listed above, allowing us to
consider them as remote services with an exposed be-
havior. Even the Cassandra algorithm has been im-
plemented as an Akka actor, installed directly in Ser-
viceMix as an OSGi bundle without the observer. In
our demo we have three remote Akka actors and Ser-
viceMix that provides three role-bundles and one bun-
dle acting as a local Cassandra service. Actually all
the components are deployed in the same machine
(2,4 GHz Intel Core 2 Duo, 4GB ram) but with differ-
ent endpoints to simulate a distributed system. Differ-
ent tests have been performed on the SSO scenario,
changing the prediction steps ahead (k). Analyzing
costs of the tests, we got the values listed by Tab. 1.
Analysis are made on executions of 9 seconds.
With the scenario we used, our tests proved the
efficacy of the proposed architecture with the failure
prediction approach Cassandra. Though, more com-
plex systems should be tested in real evolving dis-
Figure 5: Scenario SSO.
Table 1: Resources consumption over time of async moni-
toring. Scenario of Fig. 5.
k
4s 7s 9s
cpu ram cpu ram cpu ram
k=0 1% 20MB 1% 20MB 1% 20MB
k=2 6% 30MB 5% 30MB 5% 30MB
k=5 7% 30MB 5% 50MB 5% 50MB
tributed scenarios. We are confident in positive results
even with complex scenarios since, as stated in Sec. 4,
the time complexity of the predictions is not strictly
related to the number of interactions of a system.
6 RELATED WORK
This section provides related work on failure predic-
tion, and run-time verification of dynamically evolv-
ing systems.
The most significant paper on online failure pre-
diction can be most probably considered the survey
conducted by Salfner et al. in (Salfner et al., 2010).
This survey analyzes and compares a number of ex-
isting online failure prediction methods, proposing a
taxonomy to classify the existing online failure pre-
diction methods. Most of them use heuristics, statis-
tics or probabilistic models to predict potential future
failures. We developed Cassandra as online failure
prediction for choreographies, but the presented ar-
chitecture could also be used in general dynamically
evolving systems.
Our proposed solution could be adapted to be used
even with different approaches from Cassandra. A
considerable number of approaches have been devel-
oped for run-time monitoring of dynamically evolv-
ing systems, as in (Chatley et al., 2004; Barringer
et al., 2007). The authors in (Chatley et al., 2004)
show how it is possible to generate a snapshot of the
structure of a running application, and how this can
be combined with behavioral specifications for com-
WEBIST2015-11thInternationalConferenceonWebInformationSystemsandTechnologies
70

ponents to check compatibility against system prop-
erties. In (Barringer et al., 2007) it is described
a mechanisms for combining programs from sepa-
rate components and an operational semantics for
programmed evolvable systems. In (Goldsby et al.,
2007) a run-time monitoring and verification tech-
nique is proposed, which can check whether dynami-
cally adaptive software satisfies its requirements. In
(Filieri et al., 2012) KAMI is proposed to support
fault detection. It shares similar goals with Cassan-
dra, even if we focus on functional failures and them
on non functional properties. The work in (Ghezzi
et al., 2012) shares with Cassandra monitor functional
properties in dynamically evolving systems for infer-
ring a run-time model of it. without failure prediction.
7 CONCLUSIONS AND FUTURE
WORK
This paper has proposed a concrete architecture to re-
alize dynamic WS compositions, capable of support-
ing run-time failure prediction with the Cassandra ap-
proach. This approach captures the current state of
a service-based system through monitoring its exe-
cution to check potential protocol mismatches in the
near future. The proposed architecture, based on an
ESB and an Integration Framework, allows services
to be dynamically composed, exchanging messages
following choreography rules. The whole system can
be monitored at run-time, without modifying the par-
ticipating services. Our demo, although tested on a
light scenario, demonstrates a concrete implementa-
tion to make use of the Cassandra algorithm. We
are confident that the approach is quite promising,
even if technical and theoretical problems must be
still solved.
As future work, we want to investigate a tech-
nique to automatically derive role-bundle and static
routes from a choreography specification. Moreover,
we want to use our architecture with monitoring ca-
pabilities to automatic repair at run-time unrealiz-
able choreographies. As we allow the a-priori inte-
gration of services, we want to optimistically realize
choreographies, even if they may be not-realizable.
Our idea is to provide role-bundles with automatic
choreography-repair techniques, activated if possible
interoperability errors are predicted.
ACKNOWLEDGEMENTS
This work has been partially supported by:
• ”Open City Platform” - funded by MIUR (SCN
00467);
• ”CHOReOS” - EU FP7 Project (IP 257178).
REFERENCES
Autili, M., Inverardi, P., and Tivoli, M. (2015). Automated
synthesis of service choreographies. Software, IEEE,
32(1):50–57.
Baresi, L., Nitto, E. D., and Ghezzi, C. (2006). Towards
open-world software: Issue and challenges. In SEW-
30 2006, 25-28 April 2006, Columbia, MD, USA,
pages 249–252.
Barringer, H., Gabbay, D. M., and Rydeheard, D. E. (2007).
From runtime verification to evolvable systems. In
RV, pages 97–110.
Basu, S., Bultan, T., and Ouederni, M. (2012). Deciding
choreography realizability. In ACM SIGPLAN No-
tices, volume 47, pages 191–202. ACM.
Bourne, S., Szabo, C., and Sheng, Q. Z. (2012). Ensuring
well-formed conversations between control and oper-
ational behaviors of web services. Service-Oriented
Computing, pages 507–515.
Chatley, R., Eisenbach, S., Kramer, J., Magee, J., and Uchi-
tel, S. (2004). Predictable dynamic plugin systems. In
FASE, pages 129–143.
de Alfaro, L. and Henzinger, T. A. (2001). Interface au-
tomata. In ESEC/SIGSOFT FSE, pages 109–120.
De Angelis, F., Di Berardini, M. R., Muccini, H., and Polini,
A. (2014). Cassandra: An online failure prediction
strategy for dynamically evolving systems. In Formal
Methods and Software Engineering, pages 107–122.
Springer.
De Angelis, F., Fan
`
ı, D., and Polini, A. (2013). Partes: A
test generation strategy for choreography participants.
In Automation of Software Test (AST), 2013 8th Inter-
national Workshop on, pages 26–32. IEEE.
Elia, I. A., Laranjeiro, N., and Vieira, M. (2014). Itws:
An extensible tool for interoperability testing of web
services. In Web Services (ICWS), 2014 IEEE Inter-
national Conference on, pages 409–416. IEEE.
Filieri, A., Ghezzi, C., and Tamburrelli, G. (2012). A for-
mal approach to adaptive software: continuous assur-
ance of non-functional requirements. Formal Aspects
of Computing, 24:163–186.
Ghezzi, C., Mocci, A., and Sangiorgio, M. (2012). Runtime
monitoring of component changes with spy@runtime.
In ICSE 2012, pages 1403 –1406.
Goldsby, H., Cheng, B. H. C., and Zhang, J. (2007).
Amoeba-rt: Run-time verification of adaptive soft-
ware. In MoDELS Workshops, pages 212–224.
Hanumantharayappa, A. K. (2014). Enabling horizontal
scalability in an open source enterprise services bus.
Morin, B., Barais, O., J
´
ez
´
equel, J.-M., Fleurey, F., and Sol-
berg, A. (2009). Models@ run.time to support dy-
namic adaptation. IEEE Computer, 42(10):44–51.
AFlexibleArchitecturetoMonitorDynamicWebServicesComposition
71

Salfner, F., Lenk, M., and Malek, M. (2010). A survey
of online failure prediction methods. ACM Comput.
Surv., 42(3).
Shoham, S., Yahav, E., Fink, S. J., and Pistoia, M. (2008).
Static specification mining using automata-based ab-
stractions. IEEE Trans. Software Eng., 34(5):651–
666.
WEBIST2015-11thInternationalConferenceonWebInformationSystemsandTechnologies
72
