
Real Time Bidirectional Translator of Portuguese Sign Language
Paula Escudeiro
1
, Nuno Escudeiro
1
, Rosa Reis
1
, Pedro Rodrigues
1
, Jorge Lopes
1
, Marcelo Norberto
1
,
Ana Bela Baltasar
1
, Maciel Barbosa
2
and José Bidarra
3
1
Departamento de Engenharia informática - Instituto Superior de Engenharia do Porto, Porto, Portugal
2
Departamento de Engenharia Electrotécnica - Faculdade de Engenharia do Porto, Porto, Portugal
3
Departamento de Ciências Exactas e Tecnologia - Universidade Aberta, Lisboa, Portugal
Keywords: Portuguese Sign Language, Education, Deaf, Kinect, Sensor Gloves, Translator, Machine Learning, OpenCv,
Support Vector Machines, Dynamic Time Warping, Avatar, Serious Games.
Abstract: The communication with deaf by means of written text is not as efficient as it might seem. In fact, there is a
very deep gap between sign language and spoken/written language. The deployment of tools to assist the daily
communication between deaf people and the rest may be a significant contribution to the social inclusion of
the deaf community. The work described in this paper addresses the development of a bidirectional translator
between Portuguese Sign Language and Portuguese text and a serious game to promote the learning of the
Portuguese Sign Language. The translator from sign language to text employs two devices, namely the
Microsoft Kinect and 5DT Sensor Gloves in order to gather data about the motion and shape of the hands.
The hands configurations are classified using Support Vector Machines. The classification of the movement
and orientation of the hands is achieved through the use of Dynamic Time Warping algorithm. The translator
exhibits a precision higher than 90%. In the other direction, the translation of Portuguese text to Portuguese
Sign Language is supported by a 3D avatar which interprets the entered text and performs the corresponding
animations. As a complement, we also present a serious game directed to assist in the difficult task of learning
the Portuguese Sign Language.
1 INTRODUCTION
Promoting equity, equal opportunities to all and
social inclusion of people with disabilities is a
concern of modern societies at large and a key topic
in the agenda of European Higher Education. The
evolution of science and the emergence of new
technologies combined with the commitment and
dedication of many teachers, researchers and the deaf
community is promoting the social inclusion and
simplifying the communication between hearing
impaired people and the rest.
Despite all the progress, we cannot ignore the fact
that the conditions provided by the society for the
deaf are still far from being perfect. For example, in
the public services, it is not unusual for a deaf citizen
to need assistance to communicate with an employee.
Another critical area is education. Deaf children have
significant difficulties in reading due to difficulties in
understanding the meaning of the vocabulary and the
sentences. This fact together with the lack of
communication via sign language in schools severely
compromises the development of linguistic,
emotional and social skills in deaf students.
The VirtualSign project intends to reduce the
linguistic barriers between the deaf community and
those not suffering from hearing disabilities.
The project is oriented to the area of sign language
and aims to improve the accessibility in terms of
communication for people with disabilities in speech
and/or hearing, and also encourage and support the
learning of the Portuguese Sign Language.
The work described in this paper has three
interconnected modules. These include a translator
from gestures in Portuguese Sign Language (PSL) to
text, that collects input data from a Microsoft Kinect
device and a pair of data gloves, a translator from
Portuguese written text to PSL, that uses a 3D avatar
to reproduce the animations of the gestures
corresponding to the written text, and a module
consisting of a serious game designed to improve the
learning of PSL. The first two modules are
independent from the game. The game is an
application that uses the bi-directional translator
between PSL and written Portuguese with a specific
203
Escudeiro P., Escudeiro N., Reis R., Rodrigues P., Lopes J., Norberto M., Baltasar A., Barbosa M. and Bidarra J..
Real Time Bidirectional Translator of Portuguese Sign Language.
DOI: 10.5220/0005448502030213
In Proceedings of the 11th International Conference on Web Information Systems and Technologies (WEBIST-2015), pages 203-213
ISBN: 978-989-758-106-9
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

aim like many other applications that may be
developed. Several technologies have been integrated
including the Blender modelling software, the Unity
3D and Ogre game engines and the integrated
development environment Microsoft Visual Studio
together with a set of multi-paradigm programming
languages, namely C# and C++.
In the remaining of this paper we briefly describe
the Portuguese Sign Language, in Section 2, followed
by a revision of related work, in Section 3. Section 4
gives an overview of our proposal, while Section 5
provides the technical details of the translation from
sign language to text, Section 6 provides details of the
translation from text to sign language and Section 7
describes the serious game proposed to assist learning
of the Portuguese Sign Language. Section 8 presents
our conclusions.
2 PORTUGUESE SIGN
LANGUAGE
The Portuguese Sign Language (PSL) had its origins
back in 1823 at the Casa Pia of Lisbon, from the
initiative of Pär Aron Borg, a Swedish educator and
pioneer in the education of deaf people. Currently,
although there are no similarities in terms of
vocabulary between the Portuguese and Swedish sign
languages, the alphabets of both languages continue
to show their common origin. The interest in PSL has
shown remarkable growth over time, not only by the
deaf community - which now accounts for nearly
100000 persons in Portugal (Associação de Surdos do
Porto, 2015) - but also for the whole community
involved, such as relatives, educators, teachers, and
many more.
The Sign Language, like any other living
language, is constantly evolving, increasingly being
seen as a language of instruction and learning in
different areas, a playful language in times of leisure,
and professional language in several areas of work
(Morgado and Martins, na).
2.1 Linguistic Aspects
The Portuguese Sign Language involves a set of
components that make it a rich and hard to decode
communication channel. When performing PSL, we
must take account of a series of parameters that define
the manual and non-manual components. By
changing one of these parameters, usually the gesture
changes or loses its meaning. At the level of manual
component, we apply the definition of dominant and
non-dominant (or supporting) hand. Usually for
each person, the dominant hand coincides with the
hand with greater dexterity. In the execution of
gestures, the acting of the dominant hand may
possibly differ from the support hand.
The manual component includes:
configuration of the hand. By configuration of
the hands we mean the form that each hand
assumes while executing the gesture. There is a
total of 57 hand configurations, shared between
the dominant and supporting hand, which form the
basis of the PSL.
orientation of the palm of the hand. Some pairs
of configurations differ only in the palm’s
orientation.
location of articulation. The place of articulation
comprises the different areas of the body where
the gestures are performed (gestural space). Some
gestures are intrinsically connected to a contact
point (e.g. eyes, neck, chest, trunk, etc.), others are
held in front of the person, without any contact
point (as in the case of the alphabet).
movement of the hands. The movement is
characterized by the use of one or two hands and
by the motion of the hands in the gestural space.
The non-manual component comprises:
body movement. The body movement is
responsible for introducing a temporal context.
The torso leaning back, upright or forward
indicates the communication in the past, present
or future, respectively.
facial expressions. The facial expressions add a
sense of emotion to the speech, that is, a
subjective experience, associated with
temperament, personality and motivation. Two
distinct emotions cannot occur simultaneously,
since the emotions are mutually exclusive.
3 RELATED WORK
Although it is a relatively new area of research, in the
last two decades a significant number of works
focusing on the development of techniques to
automate the translation of sign languages with
greater incidence for the American Sign Language
(Morrisey and Way, 2005), and the introduction of
serious games in the education of people with speech
and/or hearing disabilities (Gameiro et al., 2014) have
been published.
Several of the methods proposed to perform
representation and recognition of sign language
WEBIST2015-11thInternationalConferenceonWebInformationSystemsandTechnologies
204

gestures, apply some of the main state-of-the-art
techniques, involving segmentation, tracking and
feature extraction as well as the use of specific
hardware as depth sensors and data gloves. Deusdado
(Deusdado, 2002) writes about the use of new
technologies for dissemination and teaching of sign
language, highlighting the use of 3D models (avatars)
in the translation of words to sign language. Bragatto,
T. A. C. et al. (Bragatto et al., 2006) suggest the use
of colored gloves and the application of a low
complexity neural network algorithm for recognition
of the hands configurations. The model has a
recognition rate of 99,2%. Nicolas Pugeault et al.
(Pugeault and Bowden, 2011) suggest a system for
recognition of the hand configuration in the context
of ASL, using the Microsoft Kinect to collect
information about appearance and depth, and the
OpenNI + NITE framework (Rezende and Tavares,
2013) to detect and track the hand. The collected data
is classified by applying a random forests algorithm
(Breiman, 2001), yielding an average accuracy rate of
49,5%. Cooper et al. (Cooper et al., 2011) use
linguistic concepts in order to identify the constituent
features of the gesture, describing the motion,
location and shape of the hand. These elements are
combined using HMM for gesture recognition. The
recognition rates of the gestures are in the order of
71,4%. Vladutu et al. (Vladutu, 2009) propose the
analysis of the video stream using singular value
decomposition (Klema and Laub, 1980) to extract the
representative images by Fuzzy-Logic (Klir and
Yuan, 1995). Then the color and shape features are
extracted using MPEG-7 descriptors and finally the
classification of the hand configuration is made using
a Support Vector Machine (SVM) (Steinwart and
Christmann, 2008). The authors claim an error rate
lower than 10%. McGuire et al. (McGuire et al.,
2004) propose an ASL translator using sensors gloves
in conjunction with the HMM. With the shown
model, for a small vocabulary, they achieve an
accuracy of 94%. The project CopyCat (Brashear et
al., 2010) is an interactive adventure and educational
game with ASL recognition. Colorful gloves
equipped with accelerometers are used in order to
simplify the segmentation of the hands and allow
estimating the motion acceleration, direction and the
rotation of the hands. The data is classified using
HMM, yielding an accuracy of 85%.
4 THE VIRTUALSIGN
VirtualSign PTDC/CPE-CED/121878/2010 is a
research project funded by the Portuguese
government through the FCT - Fundação para a
Ciência e a Tecnologia. The project has the
participation of researchers from the School of
Engineering of the Polytechnic of Porto, the Faculty
of Engineering of the University of Porto and the
Portuguese Open University and an expert in PSL.
VirtualSign aims to contribute to a greater social
inclusion for the deaf. Its main motivation comes
from a team of university teachers that have realized
the difficulties in communicating with deaf students
in the context of a class. The creation of a real time
bi-directional translator between PSL and text is
expected to facilitate the communication with
students who have hearing disabilities. In addition to
the bi-directional translator, this paper also presents a
serious game directed to assist in the learning of the
Portuguese Sign Language.
The project bundles three interlinked modules:
1. Translator of PSL to Text (Figure 1): module
responsible for the capture, interpretation and
translation of PSL gestures to text. A pair of
sensors gloves (5DT Data Gloves) provides
input about the configuration of the hands
while the Microsoft Kinect provides
information about the orientation and
movement of the hands.
Figure 1: PSL to text translator.
2. Translator of Text to PSL (Figure 2): this
module is responsible for the translation of
text to PSL. The 3D models and animations
used in this application to mime PSL were
created in Blender. A MySQL database is used
to store animation data. The main code is
written in C# and all the features are merged
together with Unity.
RealTimeBidirectionalTranslatorofPortugueseSignLanguage
205
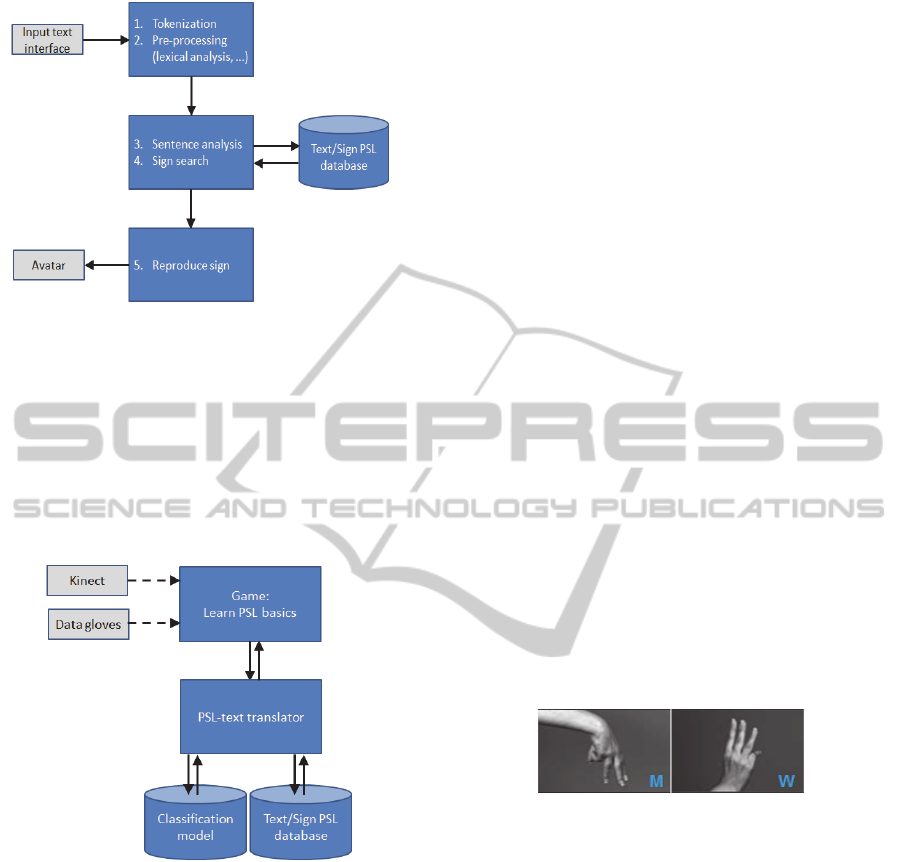
Figure 2: Text to PSL translator.
3. Serious Game (Figure 3): Module responsible
for the didactic aspects which integrates the
two modules above described into a serious
game. This adventure game has several
challenges that bring the basics of PSL to the
scene introducing the player to the PSL
alphabet, commonly used words and
sentences.
Figure 3: VirtualSign game and translator.
5 PSL TO TEXT
The translation from a visual representation of speech
to text is a complex process that involves not only the
ability to distinguish between words, but also to
identify the beginning and end of each word in a full
speech. Similarly to what happens with oral
languages - in which the speakers reproduce their
understanding of the language by introducing
personal characteristics, in particular accent and
speech speed- several features bring meaning to the
communication in sign language. Gestures in sign
language performed by different people usually have
significant variations in terms of speed, range,
movement etc. These characteristics require the
adoption of flexible metrics to identify each word and
to delimit the words in a sentence. To simplify we
consider that a word corresponds to a gesture in PSL.
A gesture comprises a sequence of configurations
from the dominant hand, each associated with
(possibly) a configuration of the support hand, and a
motion and orientation of both hands. Each element
of the sequence is defined as an atom of the gesture.
The beginning of a gesture is marked by the adoption
of a configuration by the dominant hand. The end of
the gesture is marked either by the return of the
dominant hand to a neutral position or by a
configuration change. In the case of a configuration
change, two scenarios may arise: the newly identified
configuration is an atom of the sequence of the
gesture in progress or the acquired atom closes the
sequence of the gesture in progress and signals the
beginning of a new gesture that will start with the
following atom.
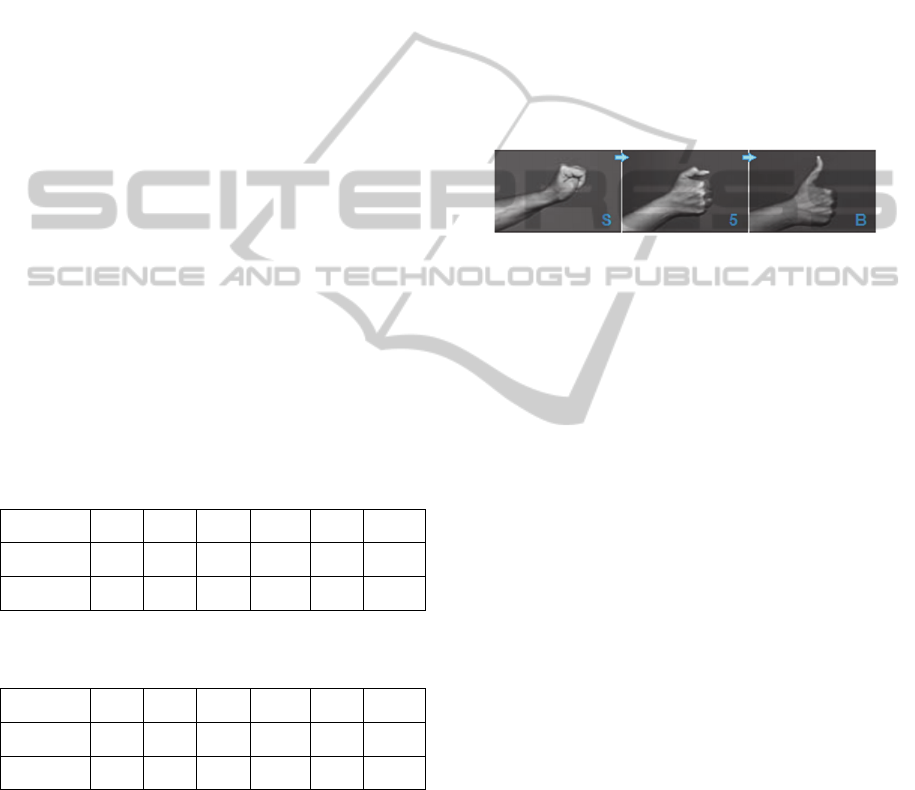
5.1 Hand Configuration
In PSL there is a total of 57 hands configurations.
However, only 42 of those are completely different,
since 15 pairs differ only in the orientation. Such is
the case of the letters "M" and "W", as seen in Figure
4, where the configuration is similar and only the
palm orientation changes.
Figure 4: Hand configuration for the letters M and W
respectively.
The configuration assumed by the hand is identified
through classification – a machine learning setting by
which one (eventually more) category from a set of
pre-defined categories is assigned to a given object.
A classification model is learned from a set of
labelled samples. Then, this model is used to classify
in real time new samples as they are acquired.
5.1.1 Hand Configuration Inputs
In order to obtain information to identify the
configuration assumed by each hand over time, we
use 5DT data gloves (5DT Data Glove Ultra, 2011).
Each glove has 14 sensors placed at strategic
locations of the hand's articulation and provides data
at a maximum rate of 100 samples per second. The
inputs received from the sensors in the data gloves are
WEBIST2015-11thInternationalConferenceonWebInformationSystemsandTechnologies
206
stable, but still a low level of noise is present. To
improve the robustness of the data acquisition process
and reduce the classification burden, we only retain
one sample from the sensors output (for further
classification) each time the data remains stable for a
pre-defined period of time, after having detected a
significant change.
5.1.2 Classification
Once having ensured stability of the data, we proceed
with the classification of the configuration. During a
preparatory stage we have compared the performance
of six classification algorithms, namely Random
Trees (RT) (Le Gall, 2005), Boost Cascade (BC)
(Viola and Jones, 2001), Neural Networks (NN)
(Haykin, 2004), K-Nearest Neighbours (KNN)
(Cover and Hart, 1967), Naive Bayes (NB) (Rish,
2001) and Support Vector Machine (SVM). For all
these algorithms we have used the default
configuration of the respective implementation
available in the Open Source Computer Vision
Library (OpenCV) (Bradski
and Kaehler, 2008). To
evaluate their performance we have used a dataset
composed of 40 samples for each hand configuration
(1680 samples in total). To reduce the variance of our
estimates we have used 10-fold cross validation. In
Table 1 and Table 2 we present the results of the
evaluation for each glove (right and left glove).
Table 1: Classification results of the 1680 samples,
obtained with the use of the left glove.
% RT BC NN KNN NB SVM
Precision 98,6 82,0 98,1 98,8 97,5 98,6
Accuracy 85,5 95,4 78,1 97,3 97,1 100,0
Table 2: Classification results of the 1680 samples,
obtained with the use of the right glove.
% RT BC NN KNN NB SVM
Precision 98,8 86,1 97,2 98,0 98,0 98,1
Accuracy 87,3 96,6 80,4 98,2 96,8 100,0
From these results, we may discard the Boost Cascade
algorithm, by far the worst of all. We have also
discarded Neural Network due to the high
computational cost when in comparison to the rest.
This is a serious drawback since we need a classifier
to use in real time. The remaining four algorithms,
present a high precision and accuracy. Based on these
results we have opted to use SVM classifiers. For
each configuration we have kept the top three
instances and their associated probability, meaning
that the application will take into consideration the
tree configurations with the highest probability and
their probability will be used in the classification to
increase the accuracy. These instances were used later
to build the classification model for word recognition.
A point to take into consideration is the fact that
intermediate (fake) configurations that constitute
only noise may occur during the transition between
two distinct configurations. As example we can see in
Figure 5 the transition from the configuration
corresponding to the letter "S" to the configuration
corresponding to the letter "B", where we obtain as
noise an intermediate configuration associated that
matches the hand configuration for number "5" in
PSL.
Figure 5: Transition from configuration S to configuration
B, through the intermediate configuration (noise) 5.
Intermediate configurations differ from the others by
the time component, i.e., intermediate configurations
have a shorter steady time, which is a constant feature
that may be used to distinguish between a valid
configuration and a noisy, intermediate
configurations. Thus, we use information about the
dwell time of each configuration as an element of
discrimination by setting a minimum execution
(steady) time below which configurations are
considered invalid.
5.2 Hand Motion and Orientation
To obtain information that allows characterizing the
movement and orientation of the hands we use the
Microsoft Kinect. In order to equalize the sampling
frequency between Kinect and the data gloves, we
reduced the frequency of sampling in the gloves to 30
samples per second. For each skeletal point, the
Kinect provides information about the position in
space (x, y, z) over time. Of the 20 points available
we only use 6, in particular the points corresponding
to the hands, elbows, hip and head. We consider that
a gesture is valid only if the dominant hand is
positioned above the hip, and a gesture is performed
with both hands only if both hands are above the hip.
Differences are notorious when there is a significant
dissimilarity in the level of proficiency in sign
language. The time that it takes to perform the gesture
is one of the most prevalent differences. So, in order
RealTimeBidirectionalTranslatorofPortugueseSignLanguage
207

to remove the influence of the time in the
classification of the gesture, we only save information
about the motion when a significant movement
happens, i.e. when the difference between the
position of the dominant hand (or both hands), and the
last stored position is greater than a predefined
threshold. Therefore, when a significant movement is
detected we save an 8-dimensional vector
corresponding to the normalized coordinates of each
hand (x
n
, y
n
, z
n
) and the angle that characterizes its
orientation. If the gesture is performed just with the
dominant hand, the coordinates and angle of the
support hand assume the value zero. The coordinates
are normalized by performing a subtraction of the
vector that represents the hand position (x
m
, y
m
, z
m
)
by the vector that defines the central hip position (x
a
,
y
a
, z
a
).
,
,
,
,
,
,
The orientation is calculated based on the angular
coefficient defined by the straight line that intersects
the hand (x
a
, y
a
) and the elbow (x
c
, y
c
).
tan
In summary, for each configuration assumed by the
dominant hand, a set of vectors characterizing the
motion (position and orientation) of the hands are
recorded.
5.3 Classification of PSL Gestures
A sequence consists of, at least, one configuration of
the dominant hand. Each sequence may have a
configuration of the support hand and a motion
associated to it. A sequence corresponds to one or
more words. Figure 6 shows the scheme of the
gesture's fulfilment corresponding to the greeting
"Bom dia” (“Good Morning" in English), and its
representation in the translator’s model.
Figure 6: The PSL gesture corresponding to the greeting
"Bom dia" and its representation in the translator.
By analyzing the previous illustration we see that the
gesture is performed only with the dominant hand
(support hand was not used), having occurred the
transition between two configurations, being the most
likely configurations the ones associated with the
letter "B" and number 1 respectively (configurations
of the “bom dia” gesture). In the first atom, the motion
was nil so we only have one point in space, whereas
in the second atom we have an arc-shaped movement.
Once the dominant hand returns to the neutral
position (the construction of the sequence is ended)
we can proceed with the classification of the resulting
sequence. Each gesture in the database (previously
built) is successively aligned with a fragment of the
sequence in analysis of size equivalent to the gesture
size. Each pair of aligned atoms is compared, being
given a weight of one third to each of their
components (dominant hand, support hand and
movement). If the hand configuration matches, it is
assigned a value corresponding to P
n
multiplied by
the maximum value of the component, where P
n
correponds to the associated probability obtained
previously in the classification of the configuration.
If there is no match, a null value is given to the
component. The comparison between the series of
vectors that describe the movement is performed by
applying the sequence alignment algorithm Dynamic
Time Warping (Müller, 2017). Finally, the value
obtained in the comparison of each pair of atoms is
added and normalized by the number of atoms that
composes the gesture. The highest ranked gesture
shall, in principle, correspond to the gesture actually
performed in this fragment.
5.3.1 Evaluation
In order to evaluate the performance of the translator,
we performed several sequences of gestures in PSL.
Each sequence was formed by a variable number of
words from a set of 10 distinct words, in particular,
"Ola" (W
0
)(hello), "Bom Dia" (W
1
)(good morning),
"Boa tarde" (W
2
)(good afternoon), "Boa Noite"
(W
3
)(good night), "Sim" (W
4
)(yes), "Não" (W
5
)(no),
"Aprender" (W
6
)(learn), "Ar" (W
7
)(air), "Maça"
(W
8
)(aple), "Branco" (W
9
)(white). To ensure that the
algorithms can distinguish similar gestures, we have
used pairs of words that present some similarities
between them, such as words that use the same hand
configurations differing only in the movement (e.g.
"Bom dia" and "Boa tarde"), words that have the same
motion but require different configurations of the
hands (e.g. "Maça" and "Branco") and words that
differ in the number of transitions of the dominant
hand (e.g. "Boa noite" and "Aprender"). In the Table
3 we have the resulting confusion matrix.
In terms of results, we have achieved a significant
precision in the order of 91.7% with real-time
translation, which consists of a very positive result.
For upcoming evaluations, it is necessary to expand
the vocabulary to ensure that the performance
remains at high standards.
WEBIST2015-11thInternationalConferenceonWebInformationSystemsandTechnologies
208
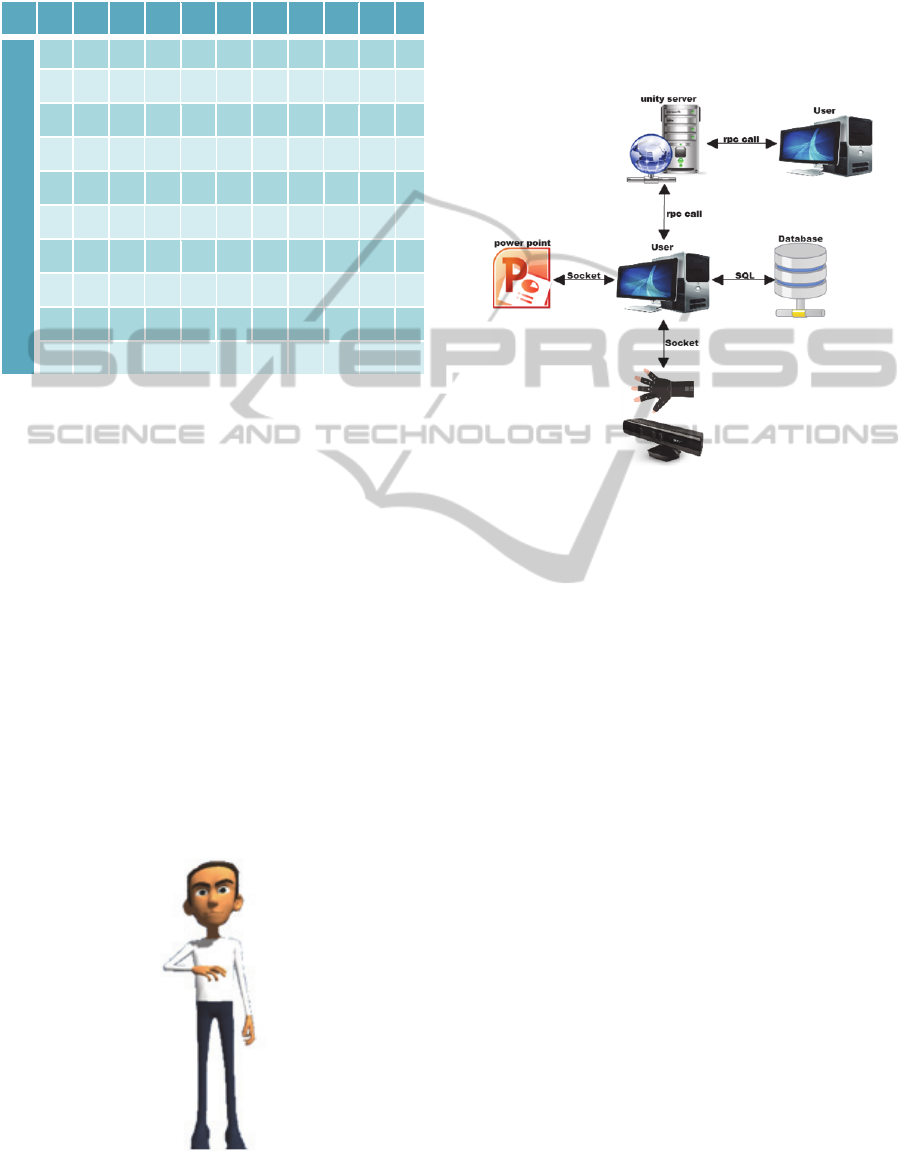
Table 3: The confusion matrix. The last column of the
matrix corresponds to the number of times there was no
valid match for each word.
W
0
W
1
W
2
W
3
W
4
W
5
W
6
W
7
W
8
W
9
X
W
0
27 3
W
1
26 4 0
W
2
1 29 0
W
3
3 2 25 0
W
4
26 4
W
5
27 3
W
6
29 1
W
7
27 3
W
8
30 0
W
9
1 29 0
6 TEXT TO PSL
The translation of Portuguese text to PSL is a quite
demanding task due to the specific linguistic aspects
of PSL. Such as any other language, the PSL has
grammatical aspects that must be taken into
consideration. For instance, the facial expression and
the body position are relevant for the translation. The
different body tilting changes the tense of the speech.
When the body is tilted forward the text is being said
in the future tense, if it is tilted backwards the text has
to be in the past tense.
In order to support the deaf community this
module has integrated an orthographic corrector. This
feature aims to aid the user to understand any possible
mistakes written for the translation, however it won’t
change what the user wrote, it simply points out that
there may be a mistake. The avatar used for the
Figure 7: Avatar.
translations was created in Blender (Hess, 2007) as
well as its animations. The avatar body is identical to
a human one in order to get the best quality in the
translation as possible.
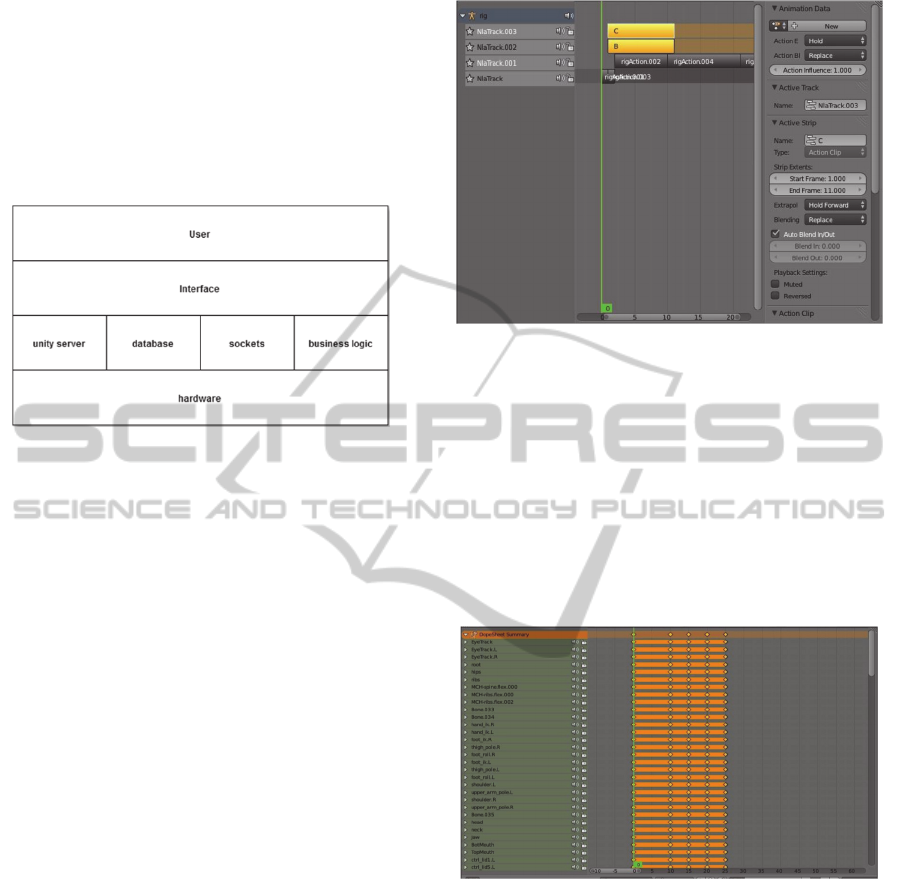
6.1 Structure
Figure 8: Structure.
The text to PSL translator module is divided in
several parts. The connection to the Kinect and data
gloves is based on sockets which will retrieve
information from the Gesture to text translator in a
string and the reason it is represented in the figure 8
is because the gestures performed by the user can be
reproduced by the avatar. After the string containing
the message is received the text to gesture translator
replies to the sender letting it know that the animation
was played and the text received was translated. This
protocol was also used for the PowerPoint Add-in,
however the text sent will not be coming from the
translator but from the PowerPoint slide itself. The
Add-in will send each word on the slide, highlight it
and wait for the reply in order to continue so that the
user knows what is being translated at the time. The
database contains all the animation names and the
corresponding text, based on this it becomes easier to
know which gesture to perform based on the text. The
database is MySQL (MySQL, 2001). During the
translation process the application will search the
database for the word that came as input, either
written on the program or from other applications.
When the text is found in the database there will be
an animation assigned to it and that animation will be
played. In case the text is not in the database the
avatar will proceed to translate that text letter by
letter.
RealTimeBidirectionalTranslatorofPortugueseSignLanguage
209
A chat was also created within this project so that
all the features could be used on it to improve the
integration with this community. The chat works
using the Unity server and resorts to RPC calls to the
server, being able to support up to twenty persons at
the same time.
6.1.1 Architecture
Figure 9: Architecture.
The architecture is organized in two main layers.
First, we have the interface layer that allows a user to
interact with the functionalities of the module. The
second layer is divided into four parts, including the
sockets, the web-service, the database and the
business layer. The business layer is the layer that
implements the functionalities, providing its services
to the layer immediately above. The web-service
layer is in charge of making connections to the server
to allow the connection from multiple devices. The
layer sockets is in charge of linking the application
with the Kinect so you can get answers from the
recognition made by translator and also to connect the
translation system with the power point. Finally, there
is a database in charge of storing the information
necessary for translation, such as the name of the
animations. In communication between layers, the
topmost layer can communicate with the lower level.
6.2 Gesture Animations
After understanding Blender's features, it was
necessary to understand how to perform each
animation. First all the animations were made
continuously, however at the end of this experience it
proved to become very difficult to work with them
later. So we decided to make every gesture apart in a
new nlaTrack (lines that keep the position of the body
in motion frames), thus making the use of the
animations easier and making them independent from
each other.
As the previous figure reveals to create the
animations it is necessary to treat the animation with
Figure 10: NlaTracks.
the nlatracks. In the nlatracks the information
referring to the animation was kept, such as the initial
frame and all the necessary frames that create the
motion for the full animation. All the information was
then stored in Animation Data where all nlaTracks are
stored. The animation name created was also stored
in the same nlaTrack.
As for the creation of frames it was necessary to
create a path for frames that Blender could plug in
gently and creates the desired effect for the animation.
Figure 11: Frames.
With support of the previous figure it is possible to
understand how the various frames must be
coordinated. The keyframes(frames containing the
position of the avatar) were placed, for instance at
frames: 10, 15, 20 and 25. That way we can create a
fluid and smooth animation without having to deal
with the moments between each frame stored in
nlatrack. The avatar contains a Rig (armor and avatar
bones), this armor is used in order to move the Avatar
body as intended.
WEBIST2015-11thInternationalConferenceonWebInformationSystemsandTechnologies
210
7 SERIOUS GAME
Learning a new language is always a complex task
which requires a considerable amount of effort and
time. Resorting to gamification a serious game was
developed in order to smooth the learning process of
the Portuguese Sign Language. The game has three
main scenes, each representing a different part of
PSL. The first scene is where the user learns the
alphabet. The second scene has several of the most
used words and finally the third and last scene
contains frequently used sentences. The learning
process is based on the observation of the avatar and
the performance of the player using the Kinect. There
is an inventory system which stores all the gestures
acquired by the player, those gestures can be accessed
at any time and performed by the avatar, that is how
the player will learn to correctly execute the gestures.
All those signs are scattered around the scenes and
some must be acquired by challenges, sometimes
requiring to perform a sign in order to obtain another,
or beating a fixed score on a mini-game.
7.1 Non-functional Requirements
Accessibility: In order to play this game the user only
needs a computer with a windows OS (XP or higher),
however to use all of its features the user also needs
the VirtualSign translator together with the Kinect
and 5DT gloves.
Deployment: The game was created in Unity
(Creighton, 2010) and it’s mostly programmed in C#
however it only requires Direct3D (Trujillo, 1996).
Although not entirely necessary it is recommended to
have the graphic card drivers updated.
Usability: As a serious game this application has a
very intuitive interface and controls and it’s carefully
explained how to use them.
Performance: Good performance is always a must
especially in a game where the feedback is
instantaneous, therefore this game was optimized and
tested to ensure that in a modern machine it runs at 60
FPS(frames-per-second) and never drops under 30.
The recommended values for games are 40 FPS
(Claypool et al., 2006).
Interoperability: The game will be able to connect
to the VirtualSign translator and its features will be
used in the game checkpoints.
7.2 Game Structure
The performance of the application must always be
one of the main concerns. The application structure
was created aiming to be the most efficient and
intuitive as possible.
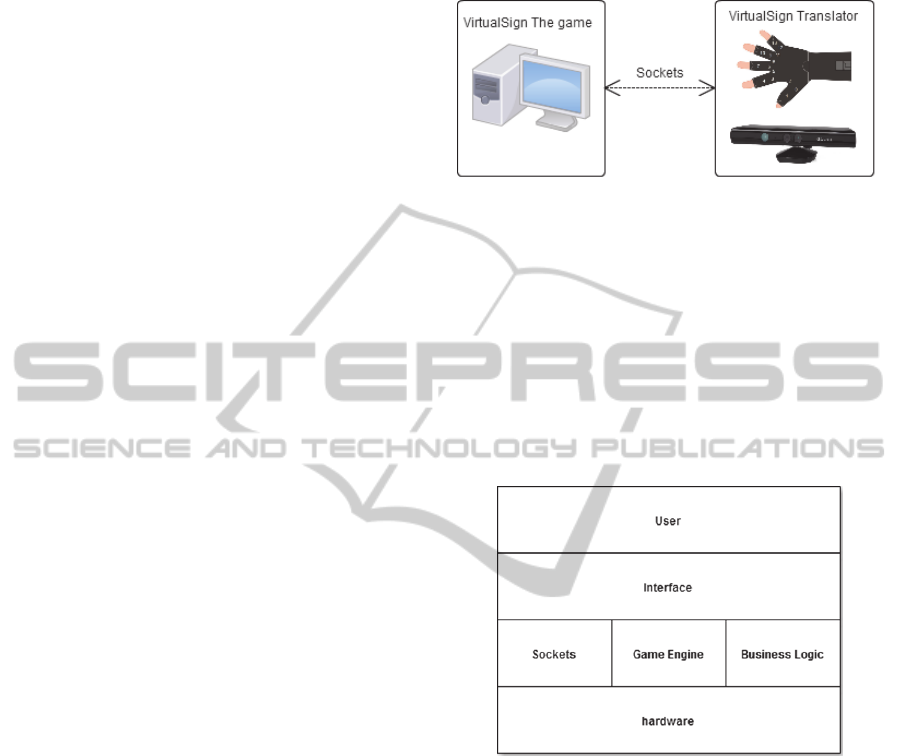
Figure 12: Interaction between The game and the translator.
The communication between the game and the
translator is done by sockets connecting both
applications (Wegner, 1996). This connection is
created upon choosing the option to play with Kinect
and stays idle until a player reaches a checkpoint, then
it will start waiting for the input. The game waits for
the translator to send a message, this message will be
the text generated by the analysis and translation of
the sign done by the user. The following architecture
was implemented:
Figure 13: Game architecture.
The project has several layers due to its high rate of
complexity. The interface is at a high layer as it is the
one responsible for the user interaction with all the
game features, therefore the interface communicates
with the layers below. In the second lowest layer there
are three parts, sockets which is the part responsible
for the connection between the translator and the
game, the game engine which is the base of the game
itself, and finally the business logic which is the main
functions of the game.
As shown in the figure above, the project has 7
main packages that contain the scripting for each
section of the game. The environment represents the
scripts for the random events within the scene, the
animation as the name suggests has the base for all
the animations, the Interface has the user interfaces
RealTimeBidirectionalTranslatorofPortugueseSignLanguage
211
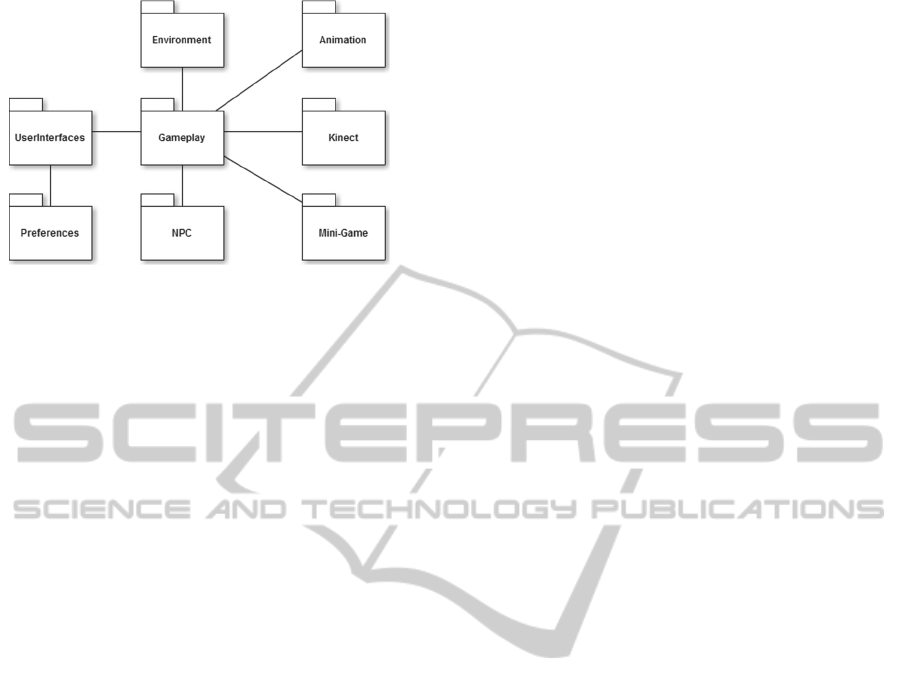
Figure 14: Package Diagram.
such as the main menus, inventory and quest
windows. The Kinect is where the connection scripts
based on sockets are stored. The NPC(non-player
character) contains the scripting for the events that
each NPC triggers. The gameplay is where the basic
functions are, such as the inventory, movement,
interaction and highscore. The preferences is very
linear as it is where the audio, graphics and saves are
stored and finally the Mini-games which contains all
the information and scripts.
8 CONCLUSIONS
With the introduction of the bidirectional translator of
Portuguese Sign Language and the serious game, this
project aims to contribute to the improvement of
accessibility in terms of communication of people
with disabilities in speech and/or hearing. The
translation module from PSL to text, although
evaluated with a small vocabulary, presents very
promising results, allowing a translation in real-time
with high precision, above 90%. However, there is
still a long way to go, mainly due to our objective to
include this module in portable devices. We intend to
eliminate the need of using the data gloves in the
project, replacing them with other solutions that
permit the identification of the configurations
assumed by the hands and the tracking of movement
as well as the detection of facial expressions,
increasing the portability and reducing the costs of
implementing the translator.
In the text to PSL translator there is still some
effort needed in order to cover the Portuguese sign
language in full. PSL has about 10000 different
words. It is also necessary to improve the spell
checker to become more efficient, currently there are
500 words covered by this tool and the corresponding
animations.
Finally, the serious game aims to improve the
knowledge of its users in order to provide an easier
integration within the deaf community. Exploiting the
motivation that drives users to play a game and
putting it to use in order to make them learn while
enjoying the gameplay smoothens the learning
process and allows the user to practice PSL while
getting rewarded for it.
The applications of the VirtualSign bi-directional
translator between PSL and text go far beyond its
original motivation linked to teaching and classroom
settings. We have a broad range of areas where such
a tool will significantly improve the life quality of the
deaf and foster the effectiveness of the daily
communication with hearing impaired persons.
AKCNOWLEDGEMENTS
This work was supported by the ISEP (Instituto
Superior de Engenharia do Porto) and GILT (Games,
Interaction and Learning Technologies) under Grant
Nos. 60973089. FCT (Fundação para a ciência e
Tecnologia) project.
REFERENCES
Larsson, Stig. "A Review of Claes G. Olsson: Omsorg och
kontroll-en handikapphistorisk studie 1750-1930 (Care
and control-an analysis of the history of disability)
Umeå 2010." Vulnerable Groups & Inclusion 2 (2011).
Associação de Surdos do Porto - Algumas definições úteis
sobre a Surdez, http://www.asurdosporto
.org.pt/artigo.asp?idartigo=77, January 2015.
Morgado, Marta, and Mariana Martins. "Língua Gestual
Portuguesa." Comunicar através de gestos que falam é
o nosso desafio, neste 25. º número da Diversidades,
rumo à descoberta de circunstâncias propiciadoras nas
quais todos se tornem protagonistas e interlocutores de
um diálogo universal.: 7.
Morrissey, Sara, and Andy Way. "An example-based
approach to translating sign language." (2005).
Gameiro, João, Tiago Cardoso, and Yves Rybarczyk.
"Kinect-Sign: Teaching Sign Language to “Listeners”
through a Game." Innovative and Creative
Developments in Multimodal Interaction Systems.
Springer Berlin Heidelberg, 2014. 141-159.
Deusdado, Leonel Domingues. Ensino da língua gestual
assistido por personagens 3D virtuais. Diss.
Universidade do Minho, 2002.
Bragatto, T. A. C., G. I. S. Ruas, and M. V. Lamar. "Real-
time video based finger spelling recognition system
using low computational complexity Artificial Neural
Networks." Telecommunications Symposium, 2006
International. IEEE, 2006.
WEBIST2015-11thInternationalConferenceonWebInformationSystemsandTechnologies
212

Pugeault, Nicolas, and Richard Bowden. "Spelling it out:
Real-time asl fingerspelling recognition." Computer
Vision Workshops (ICCV Workshops), 2011 IEEE
International Conference on. IEEE, 2011.
Rezende, Lorena A., and Dalton M. Tavares. "OpenNI e
Suas Aplicações." X Encontro Anual de Computação
(2013).
Breiman, Leo. "Random forests." Machine learning 45.1
(2001): 5-32.
Cooper, Helen, Nicolas Pugeault, and Richard Bowden.
"Reading the signs: A video based sign dictionary."
Computer Vision Workshops (ICCV Workshops), 2011
IEEE International Conference on. IEEE, 2011.
Vladutu, Liviu. "Non-rigid shape recognition for sign
language understanding." WSEAS TRANSACTIONS on
SYSTEMS 8.12 (2009): 1263-1272.
Klema, Virginia, and Alan J. Laub. "The singular value
decomposition: Its computation and some
applications." Automatic Control, IEEE Transactions
on 25.2 (1980): 164-176.
Klir, George, and Bo Yuan. Fuzzy sets and fuzzy logic. Vol.
4. New Jersey: Prentice Hall, 1995.
Steinwart, Ingo, and Andreas Christmann. Support vector
machines. Springer, 2008.
McGuire, R. Martin, et al. "Towards a one-way American
sign language translator." Automatic Face and Gesture
Recognition, 2004. Proceedings. Sixth IEEE
International Conference on. IEEE, 2004.
Brashear, H., et al. "CopyCat: A Corpus for Verifying
American Sign Language During Game Play by Deaf
Children." 4th Workshop on the Representation and
Processing of Sign Languages: Corpora and Sign
Language Technologies. 2010.
5DT Data Glove Ultra - User's Manual,
http://www.5dt.com/downloads/dataglove/ultra/5DT
Data Glove Ultra Manual v1.3.pdf, Version 1.3,
January 2011.
Le Gall, Jean-François. "Random trees and applications."
Probab. Surv 2.245-311 (2005): 15-43.
Viola, Paul, and Michael Jones. "Rapid object detection
using a boosted cascade of simple features." Computer
Vision and Pattern Recognition, 2001. CVPR 2001.
Proceedings of the 2001 IEEE Computer Society
Conference on. Vol. 1. IEEE, 2001.
Haykin, Simon (2004) Neural Network. "A comprehensive
foundation." Neural Networks 2.2004.
Cover, Thomas, and Peter Hart. "Nearest neighbor pattern
classification." Information Theory, IEEE Transactions
on 13.1 (1967): 21-27.
Rish, Irina. "An empirical study of the naive Bayes
classifier." IJCAI 2001 workshop on empirical methods
in artificial intelligence. Vol. 3. No. 22. 2001.
Bradski, Gary, and Adrian Kaehler. Learning OpenCV:
Computer vision with the OpenCV library. " O'Reilly
Media, Inc.", 2008.
Müller, Meinard. "Dynamic time warping." Information
retrieval for music and motion (2007): 69-84.
Hess, Roland. The essential Blender:
guide to 3D creation
with the open source suite Blender. No Starch Press,
2007.
MySQL, A. B. "MySQL." (2001).
Creighton, Ryan Henson. Unity 3D Game Development by
Example: A Seat-of-Your-Pants Manual for Building
Fun, Groovy Little Games Quickly. Packt Publishing
Ltd, 2010.
Trujillo, Stan. Cutting-edge Direct3D programming:
everything you need to create stunning 3D applications
with Direct3D. Coriolis Group books, 1996.
Claypool, Mark, Kajal Claypool, and Feissal Damaa. "The
effects of frame rate and resolution on users playing
First Person Shooter games." Electronic Imaging 2006.
International Society for Optics and Photonics, 2006.
Wegner, Peter. "Interoperability." ACM Computing Surveys
(CSUR) 28.1 (1996): 285-287.
RealTimeBidirectionalTranslatorofPortugueseSignLanguage
213
