Towards a Model-based Toolchain for Remote Configuration and
Maintenance of Space-aware Systems
Jan Olaf Blech
1
, Peter Herrmann
2
, Ian Peake
1
and Heinz Schmidt
1
1
RMIT University, Melbourne, Australia
2
Norwegian University of Science and Technology (NTNU), Trondheim, Norway
Keywords:
Model-driven Software Engineering, Industrial Automation.
Abstract:
We present work towards a toolchain that combines our existing tools Reactive Blocks and BeSpaceD with
our remote collaboration and visualization facility VxLab. Software development in areas such as oil and gas,
mining or automation is subject to remote configuration and maintenance of installations. Different reasons
are driving this trend including difficult accessibility of remote sites and outsourcing to offsite experts or due to
cheaper labor costs. Here, we concentrate on work towards remote configuration, installation and maintenance
of the software controlling these installations and their spatial constraints.
1 INTRODUCTION
Industrial activities connected to natural resources of-
ten take place on remote locations, e.g., mining dis-
tricts in the Australian Outback or oil rigs in the North
Sea. To reduce the high expense for accommodation
and transport of employees, the industry production
on such places is increasingly automated and con-
trolled, configured resp. maintained from a remote
location.
In many cases, work is done by machines or robots
that cooperate in close proximity to each other. Ma-
chinery has an influence on the physical space, for
example by heat emission or occupying it physically,
that can have an influence on the entire plant. The
coordination of the machines as well as the necessity
to achieve a good productivity lead to complex con-
trol software with extraordinary functional and safety
requirements. Furthermore, due to the changing en-
vironment at, e.g., a mining area, the control software
frequently needs to be configured in a customized way
which leads to refactoring and adaptation. This calls
for highly skilled software experts who could be per-
manently positioned at the remote spots at enormous
costs only.
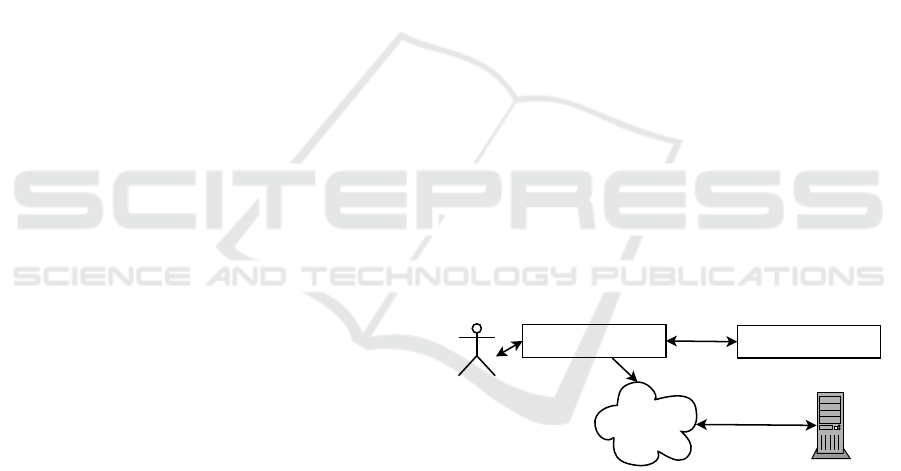
To cope with this challenge, we present initial
work on the development of a toolchain allowing
distributed development, adaptation, installation and
maintenance of control software for space-aware cy-
ber-physical systems. In particular, we aim at com-
bining and amending three existing tools:
Reactive Blocks IDE
BeSpaceD
User
robot controler
robot
control
service
Figure 1: The toolchain.
1. Reactive Blocks (Kraemer et al., 2009) is a model-
based engineering technique for reactive systems.
2. BeSpaceD (Blech and Schmidt, 2014; Blech and
Schmidt, 2013) is a tool for the verification of spa-
tiotemporal properties.
3. VxLab (Blech et al., 2014b) is a technique for the
cooperation of experts at various places in order
to simulate, validate and visualize industrial pro-
cesses.
As proof of concept, we create a toolchain that al-
lows software developed by Reactive Blocks to con-
trol a pair of cooperating ABB IRB120 industrial
robot arms that are located at RMIT University in
Melbourne. To verify properties with respect to spa-
tial behavior, we use the existing connection between
Reactive Blocks and BeSpaceD (Han et al., 2014;
Herrmann et al., 2014). Moreover, we extend the ex-
isting VxLab functionality in a way that the instal-
lation of the generated software in the control com-
puters of the robots is directly supported. This al-
lows, for instance, software experts located in Trond-
331
Olaf Blech J., Herrmann P., Peake I. and Schmidt H..
Towards a Model-based Toolchain for Remote Configuration and Maintenance of Space-aware Systems.
DOI: 10.5220/0005454703310336
In Proceedings of the 10th International Conference on Evaluation of Novel Approaches to Software Engineering (ENASE-2015), pages 331-336
ISBN: 978-989-758-100-7
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

heim to communicate via VxLab with process engi-
neers in Bangalore and maintenance personal in Mel-
bourne about software adaptations for the robots. The
changes can be carried out and verified for func-
tional and spatial correctness by the software experts.
Thereafter the code can be sent to a robot simulator
in Melbourne and the process engineers may decide
if the adaptations are correct and sufficiently safe. Fi-
nally, the code can be automatically installed at the
control computer of the robots and the robots exhaus-
tively tested before being used in production. The
planned toolchain is depicted in Fig. 1.
Existing languages for specifying automation
software comprise the IEC 61131 and IEC 61499
standards. Other means for specifying the behavior
of robots such as C- and .Net-based solutions exist
as well and are widely adopted throughout industry.
In academics, solutions based on languages such as
BIP (Basu et al., 2006) (e.g., industrial automation ap-
plications (Abdellatif et al., 2012; Blech et al., 2011)),
Lustre (Halbwachs et al., 1991), Scade (e.g., applica-
tions (Gudemann et al., 2007)), and UML/P (e.g., use
case (Thomas et al., 2013)) have been successfully
adopted for robot control systems. These come with
verification tools that allow the checking of system
properties as well as code generation. Different solu-
tions for the verification of industrial automation sys-
tem have been realized by us in the past (e.g., (Blech
and Biha, 2011; Adiego et al., 2014) for IEC 61131
based systems). The remote collaborative configu-
ration and maintenance solution proposed here, the
spatial verification application and the use of reac-
tive blocks for configuration of robot software sys-
tems, is new. Solutions for collaborative engineer-
ing, however, exist in the literature (e.g., (Kamrani
and Nasr, 2008)). We are also developing solutions
for collaborative engineering in mining and related ar-
eas based on some of the techniques described here
(see (Blech et al., 2014a)). The focus of that work,
however, is on event response (e.g., reaction to some
failure in a machine) rather than configuration of sys-
tems. In (Han et al., 2014; Herrmann et al., 2014) we
already showed that Reactive Blocks and BeSpaceD
can be combined in order to verify that models of
robot control software fulfill certain spatial properties.
2 BACKGROUND
INFRASTRUCTURE
Below, we sketch the model-based engineering
method Reactive Blocks, the spatiotemporal verifica-
tion tool BeSpaceD, and the virtual laboratory VxLab
that form the ingredients of our toolchain.
2.1 Reactive Blocks
Reactive Blocks
1
(Kraemer et al., 2009) facilitates the
model-based development of reactive software. In
particular, we have attached importance to reusing the
models of certain sub-functionality that may appear
in various applications of a certain domain. The par-
tial models are realized as building blocks that each
consists of a UML 2.x activity diagram modeling de-
tailed implementation logic and an abstract Exter-
nal State Machine (ESM) (Kraemer and Herrmann,
2009) specifying the interface behavior of the build-
ing block. System models can be developed by taking
building blocks from libraries, creating others one-
self, and combining the various blocks using the oper-
ators of UML activities. Since we provided the UML
activities and ESMs with a formal semantics (Krae-
mer and Herrmann, 2010), system models can be au-
tomatically analyzed for functional errors by a built-
in model checker (Kraemer et al., 2009). An extended
version allows also the verification of real-time prop-
erties (Han and Herrmann, 2013). The system mod-
els are automatically transformed into executable Java
code.
2.2 BeSpaceD
In (Blech and Schmidt, 2014; Blech and Schmidt,
2013), we introduce BeSpaceD as a tool framework
for specifying behavior of distributed cyber-physical
systems and formally reasoning about them. Be-
SpaceD emphasizes on spatial behavior but is not re-
stricted to this. It allows the verification of safety
properties such as the absence of physical collisions
between interacting robots and obstacles, the cover-
age of sensor ranges, or WLAN ranges. Specifica-
tion is done using abstract datatypes out of a devel-
opment environment supporting the Scala program-
ming language. The abstract datatypes can be gen-
erated by Scala programs or by instantiation of other
software. Operations such as checking and reasoning
in BeSpaceD is realized using library functions cre-
ating verification goals. Verification goals are solved
by standard tools such as SAT and SMT solvers or by
specialized algorithms.
2.3 VxLab and Industrial Robot
Control
Our Virtual “x” laboratory (VxLab) (Blech et al.,
2014b) aims at enabling decision making and design
1
Before being marketed by BitReactive AS (http://
www.bitreactive.com), the tool was named Arctis.
ENASE2015-10thInternationalConferenceonEvaluationofNovelSoftwareApproachestoSoftwareEngineering
332

Figure 2: VxLab in operation (Blech et al., 2014b).
Figure 3: An ABB IRB120 Robot Arm.
among leaders, experts and technicians distributed
globally, over multiple use cases (signified by the
“x” parameter) such as scientific computing, gam-
ing, software development, engineering and architec-
ture. VxLab is a generalization of x = “Interoperation
Testing” realized in the VITELab, a predecessor eRe-
search facility of the Australia-India Research Centre
for Automation Software Engineering (AICAUSE)
2
.
AICAUSE is a partnership between RMIT University
and the ABB Groups in Australia and India with sup-
port from the Victorian State Government. VITELab
is designed as a global “lab scope” connecting in-
dustry and university sites to enable collaboration for
experimental design and testing of distributed cyber-
physical systems.
VxLab includes, among other facilities, the
Global Operations Visualization (GOV)lab, providing
a high resolution visualization wall with integrated
video conferencing/streaming to remote sites, the
Cyber-physical Simulation (CS)Rack, a blade server
configurable via OpenStack (openstack.org), and a
2
See http://rmit.edu.au/research/aicause.
dedicated private network with high-speed connection
to industry partners. Further, the Advanced Manufac-
turing Robot Interoperation Test (AMRIT) lab pro-
vides two ABB IRB120 robot arms with standard
IRC5 controllers and Robotiq adaptive 3-fingered
grippers, that will be used in our proof of concept.
GOV lab uses SAGE visualization middleware
3
, to
prototype next generation applications via “mash-
ups” combining user interfaces of existing software
(running on local, remote or even virtual hosts) with
concept images/video.
A view of the AMRIT lab from the GOV Lab is
shown in Fig. 2. One of the robots is depicted in
Fig. 3. The GOV Lab has been applied to collabo-
ratively develop, test and monitor cyber-physical ap-
plications remotely, such as in the AMRIT lab, with
multiple users flexibly and simultaneously interacting
with multiple applications/services, such as ABB’s
RobotStudio IDE/Simulation tool and live views of
robots. For example, we developed a concept demon-
stration where real and virtual robots interact in real
time. A .Net application synchronizes, via the Robot-
Studio API, operation of two independent robot con-
trollers, one real, one simulated. On the video wall,
a simulated robot is positioned as an overlay over the
live camera view in the place where its live counter-
part would exist in a fully integrated system.
3 REMOTE DEVELOPMENT AND
CONTROL OF ROBOTS
As discussed in Sect. 2.1, Reactive Blocks allows the
creation of system models by composition of reusable
building blocks. To exemplify the engineering pro-
cess, we created a first Reactive Blocks model for the
3
http://sagecommons.org.
TowardsaModel-basedToolchainforRemoteConfigurationandMaintenanceofSpace-awareSystems
333

Figure 4: Activity GripCanSimple.
remote software control part of the robot. A result
is the UML 2.x activity diagram modeling the behav-
ior of a building block GripCanSimple which is de-
picted in Fig. 4. This building block represents the
task to grip a can, e.g., the white one shown in Fig. 3,
with a robot arm. The activity uses four inner build-
ing blocks which are taken by simple drag-and-drop
from a library.
The building block DirectTrajectory represents
the movement of the grip from its present position and
orientation on a linear trajectory to another one. UML
activities model behavior similarly to Petri nets such
that we can interpret behavior as a sequence of token
flows. Block DirectTrajectory is started at the pin to
and tokens passing this pin contain an object of class
PositionData that describes the position and orienta-
tion to be moved to. When the robot arm has reached
its new position and orientation, the block terminates
via issuing a token through pin onPosition. Likewise,
opening and closing of the grip can be realized using
library blocks.
With these library blocks, it is relatively simple
to create other building blocks modeling more com-
plex robot behavior. As shown in Fig. 4, a proof-of-
concept implementation for GripCanSimple is started
by a token received through the parameter node, i.e.,
the pin at the activity edge, startTo that contains the
position of the can to be gripped. The token forwards
to a set variable action in which the position informa-
tion is stored in the variable canPosition. Thereafter,
it reaches operation toStartPoint that refers to a Java
method of the same name which is triggered. By this
method, the starting point of gripping the can is com-
puted which is 30 cm above the can position with an
orientation such that the grip points downwards. Af-
terwards, this position information is forwarded to an
instance of building block DirectTrajectory that en-
capsulates the code to move the robot grip to the start-
ing point. In the succeeding steps, the grip is opened
and thereafter lowered to the position of the can. Fi-
nally, the grip is closed until a certain resistance is
reached such that the can is solidly gripped without
being deformed. When this step is finished, building
block GripCanSimple terminates via sending a token
to its environment through parameter node complete.
The building block GripCanSimple was checked
for functional correctness by the built-in model
checker of Reactive Blocks. In particular, it was ver-
ified whether the own ESM of the block as well as
those of the inner blocks are satisfied (Kraemer et al.,
2009). If required, one can further verify if the block
fulfils certain real-time properties, e.g., that a can is
gripped within a certain time interval (Han and Her-
rmann, 2013).
Moreover, our building blocks can be proven
with BeSpaceD for spatiotemporal properties (see
Sect. 2.2). For example, one can verify whether block
GripCanSimple guarantees that a can is gripped with-
ENASE2015-10thInternationalConferenceonEvaluationofNovelSoftwareApproachestoSoftwareEngineering
334
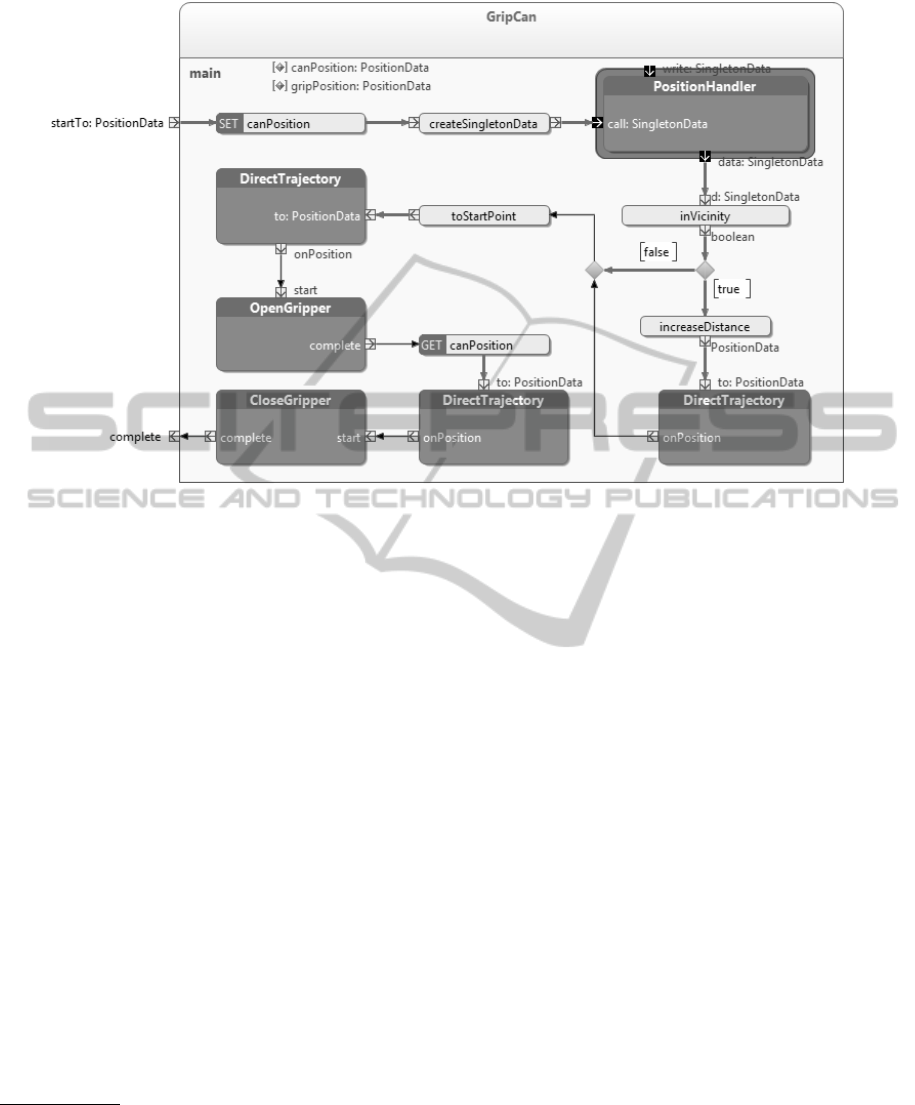
Figure 5: Activity GripCan.
out being previously overturned. This property does
not hold since the grip can initially be very close to
the can such that it can be touched on the trajectory to
the starting point 30 cm above the can.
To avoid overturning, we replace building block
GripCanSimple by GripCan that is depicted in Fig. 5.
Here, we do not move the grip immediately to the
starting point if it is close to the can but first increase
the distance to the can. For that, we read the current
position of the grip using the singleton block
4
Posi-
tionHandler. Thereafter operation inVicinity checks if
the grip is close to the can. If that is the case, the token
leaves the decision node behind inVicinity through the
edge with guard true to an instance of block Direct-
Trajectory that moves the grip to a position farer away
from the can before it is moved to the starting point.
For this variant, BeSpaceD can verify that the can is
not overturned during gripping.
Similarly, we can create building blocks for the
other functions of the robot and compose them to a
Reactive Blocks model specifying the overall system
behavior. When this model passes the correctness
proofs, it can directly be transformed to Java code.
The main task for the proof of concept is to create
4
In contrast to other building blocks, all inner blocks
of a singleton refer to the same block instance (Gunawan
et al., 2012). That is particularly useful if a single set of
data should be accessed from various points in a system
model. Here, we store the current grip position in the sin-
gleton block PositionHandler which, for instance, is also
accessed in block DirectTrajectory.
the functionality of the building blocks in our library
(like DirectTrajectory) such that the RobotStudio-
and .Net-based RMIT robots can be directly accessed.
For this, we want to use a robot configuration service
that offers an API containing routines to instantiate
robot movements. An initial version of this service is
already tested and it is not difficult to call its routines
from Java. Thus, after being started by flows via pin
to, the building blocks DirectTrajectory, OpenGrip-
per, and CloseGripper call routines of this service.
Thereafter, they wait until receiving a confirmation
message from the service which leads to terminating
the blocks with flows through pins onPosition resp.
complete. Further, the robot configuration service can
be offered as a cloud based service such that it may
also be operated from remote stations.
As in the existing .Net based solution, the Java
code is only specifying the overall behavior and does
not need to run on the robot system directly. It emits
more detailed motion control commands which are
stored and processed on a stack in the local robot
controller. These local commands comprise exact ro-
tation and movement information whereas the Java
code is responsible for the control flow of the under-
lying application and communication with additional
devices.
The system is tested and the results are visualized
using VxLab. This includes camera feedback and ac-
cess to sensor and actuator configuration information.
Further, VxLab supports the management of the pro-
duced code and the robot configuration service.
TowardsaModel-basedToolchainforRemoteConfigurationandMaintenanceofSpace-awareSystems
335

4 CONCLUSION AND ONGOING
WORK
We presented our ideas and first work towards
a toolchain for developing robot control software.
The toolchain comprises development using Reac-
tive Blocks, spatial verification, remote deployment
of control software as well as remote visualization
and monitoring of the robots. As of now, Reactive
Blocks, spatial verification using BeSpaceD and the
remote visualization and monitoring via VxLab exist.
Remote deployment and configuration of robots is on-
going work.
REFERENCES
Abdellatif, T., Bensalem, S., Combaz, J., Silva, L. D.,
and Ingrand, F. (2012). Rigorous Design of Robot
Software: A Formal Component-based Approach.
Robotics and Autonomous Systems, 60(12):1563–
1578.
Adiego, B. F., Darvas, D., Vinuela, E. B., Tournier, J.-C.,
Suarez, V. M. G., and Blech, J. O. (2014). Modelling
and Formal Verification of Timing Aspects in Large
PLC Programs. In 19th IFAC World Congress.
Basu, A., Bozga, M., and Sifakis, J. (2006). Modeling Het-
erogeneous Real-time Components in BIP. In Soft-
ware Engineering and Formal Methods. IEEE Com-
puter.
Blech, J. O. and Biha, S. O. (2011). Verification of PLC
Properties Based on Formal Semantics in Coq. In 9th
International Conference on Software Engineering
and Formal Methods (SEFM), volume LNCS 7041.
Springer-Verlag.
Blech, J. O., Hattendorf, A., and Huang, J. (2011). An In-
variant Preserving Transformation for PLC Models.
In Model-Based Engineering for Real-Time Embed-
ded Systems Design. IEEE Computer.
Blech, J. O. and Schmidt, H. (2013). Towards Modeling
and Checking the Spatial and Interaction Behavior of
Widely Distributed Systems. In Improving Systems
and Software Engineering Conference.
Blech, J. O. and Schmidt, H. (2014). BeSpaceD: Towards
a Tool Framework and Methodology for the Speci-
fication and Verification of Spatial Behavior of Dis-
tributed Software Component Systems. Technical re-
port, arXiv.org.
Blech, J. O., Schmidt, H., Peake, I., Kande, M., Ra-
maswamy, S., Sudarsan SD, and Narayanan, V.
(2014a). Collaborative Engineering through Inte-
gration of Architectural, Social and Spatial Models.
In Emerging Technologies and Factory Automation
(ETFA). IEEE Computer.
Blech, J. O., Spichkova, M., Peake, I., and Schmidt, H.
(2014b). Cyber-Virtual Systems: Simulation, Vali-
dation & Visualization. In Evaluation of Novel Ap-
proaches to Software Engineering.
Gudemann, M., Angerer, A., Ortmeier, F., and Reif, W.
(2007). Modeling of Self-Adaptive Systems with
SCADE. In Circuits and Systems (ISCAS), pages
2922–2925. IEEE Computer.
Gunawan, L. A., Kraemer, F. A., and Herrmann, P. (2012).
Behavioral Singletons to Consistently Handle Global
States of Security Patterns. In Distributed Appli-
cations and Interoperable Systems (DAIS), volume
LNCS 7272, pages 73–86. Springer-Verlag.
Halbwachs, N., Caspi, P., Raymond, P., and Pilaud, D.
(1991). The Synchronous Data Flow Program-
ming Language LUSTRE. Proceedings of the IEEE,
79(9):1305–1320.
Han, F., Blech, J. O., Herrmann, P., and Schmidt, H. (2014).
Towards Verifying Safety Properties of Real-Time
Probability Systems. In 11th International Workshop
on Formal Engineering approaches to Software Com-
ponents and Architectures (FESCA). EPTCS.
Han, F. and Herrmann, P. (2013). Modeling real-time sys-
tem performance with respect to scheduling analysis.
In 6th IEEE International Conference on Ubi-Media
Computing, pages 663–671. IEEE Computer.
Herrmann, P., Blech, J. O., Han, F., and Schmidt, H. (2014).
A Model-based Toolchain to Verify Spatial Behavior
of Cyber-Physical Systems. In Asia-Pacific Services
Computing Conference (APSCC). IEEE Computer.
Kamrani, A. K. and Nasr, E. A., editors (2008). Collab-
orative Engineering, Theory and Practice. Springer-
Verlag.
Kraemer, F. A. and Herrmann, P. (2009). Automated En-
capsulation of UML Activities for Incremental Devel-
opment and Verification. In Model Driven Engineer-
ing Languages and Systems (MoDELS), LNCS 5795,
pages 571–585. Springer-Verlag.
Kraemer, F. A. and Herrmann, P. (2010). Reactive Seman-
tics for Distributed UML Activities. In Joint WG6.1
International Conference (FMOODS) and WG6.1 In-
ternational Conference (FORTE), LNCS 6117, pages
17–31. Springer-Verlag.
Kraemer, F. A., Sl
˚
atten, V., and Herrmann, P. (2009). Tool
Support for the Rapid Composition, Analysis and Im-
plementation of Reactive Services. Journal of Systems
and Software, 82(12):2068–2080.
Thomas, U., Hirzinger, G., Rumpe, B., Schulze, C., and
Wortmann, A. (2013). A New Skill based Robot Pro-
gramming Language using UML/P Statecharts. In
Robotics and Automation (ICRA), pages 461–466.
IEEE Computer.
ENASE2015-10thInternationalConferenceonEvaluationofNovelSoftwareApproachestoSoftwareEngineering
336
