
Multi-agent Modelling for a Regulation Support System
of Public Transport
Nabil Morri
1,2
, Sameh Hadouaj
1,2
and Lamjed Ben Said
2
1
Emirates College of Technology, Millennium Tower, Sheikh Hamdan Street,
P. O. Box: 41009, Abu Dhabi, U.A.E.
2
Laboratory SOIE, Tunis University, ISG Tunis, 41 Liberty Street, City Bouchoucha 2000 Bardo, Tunis, Tunisia
Keywords: Multi Agent System, Decision Making, Regulation Support System, Public Transport.
Abstract: The increasing cost of private transport and the rising pollution of the environment pose serious problems in
society, economy and environment. The public transport has become a major challenge of collective and
daily life. However, to encourage people to use a public transport system, the offered service have to be
with good quality. This paper gives effective solutions to improve the quality of public transport service
provided to users. In this paper, we present a Regulation Support System of Public Transport (RSSPT),
based on Multi-agents approach that allows supervising and regulating a multimodal public transport. Its
purpose is to adjust the vehicle schedules where several disturbances come simultaneously. The adjustment
is based on actual traffic conditions. It covers the major criteria that have to be optimized in a traffic
regulation: punctuality, regularity and correspondence.
1 INTRODUCTION
The regulation of public transport is a complex task,
in which decisions are taken according to the current
state of the road network. The network operators
encounter many difficulties to maintain a consistent
traffic and forward planning: theoretical time table,
and respect the use rules (safety rules, business
rules, commercial rules, etc.). The disturbances must
be identified and corrected following the punctuality
criteria, regularity and correspondence. These
different criteria define the service quality of the
passenger in terms of waiting time at station and the
trip time. To insure these criteria the system must
respect the theoretical times of vehicle at station for
punctuality, respect the time interval between
vehicles of the same line for regularity and respect
the waiting time passenger at transfer station for
correspondence.
Hence, the regulation is the mechanism that leads
to effective action decision after collecting the
necessary information and optimizing the service
quality of passenger in terms of punctuality,
regularity and correspondence. It must also deal with
several kinds of disturbances at the same time
(vehicle breakdowns, absence of drivers, blocked
route, etc.) and cover the multi-modality network.
Our objective is to build Regulation Support
System of Public Transport for multimodal traffic
that is able to supervise and regulate the traffic. Our
model takes into account the major criteria that have
to be optimized in a traffic regulation: punctuality,
regularity, and correspondence (Karim, B., Bonte,
T., Sevaux, M., Tahon, C., 2005). It also deals with
many disturbances at the same times by distributed
decision. The plan of this paper is as follows: section
2 introduces the related works and there limits. In
the section 3 we justify the choice of multi-agent
approach in the modelling of our regulation support
system. Section 4 describes the functional model and
the multi-agents architecture. The section 5 presents
an example of simulation and result. The last section
gives a conclusion and future works.
2 RELATED WORKS
The approaches can be classified into two families:
2.1 Mathematical Approaches
Salah Zidi (Salah, Z., 2007) in his thesis
624
Morri N., Hadouaj S. and Ben Said L..
Multi-agent Modelling for a Regulation Support System of Public Transport.
DOI: 10.5220/0005455906240629
In Proceedings of the 17th International Conference on Enterprise Information Systems (ICEIS-2015), pages 624-629
ISBN: 978-989-758-096-3
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

proposes a technique based on a Support Vector
Machine (SVM) and ant colony algorithms.
However the regulation action acts only on vehicles
passages schedules without considering other
objectives such as correspondence and regularity.
The offered solution is a reconfiguration of new
schedules or routes according to the new traffic
conditions.
Sofiene Kachroudi (Sofiene, K., 2010) proposes
a regulating approach for both private and public
modes on wide urban network. This approach uses
an optimization method for particle swarms. It’s a
simple meta-heuristic implementation. But it doesn’t
address the problems of correspondence and
punctuality.
R. Hartani (Hartani, 95) establishes linear
mathematical models characterizing the vehicle
movement between two successive stations of a
public transport line in a high density. This method
effectively treats punctuality. However, there is no
direct link between the calculated values and their
impact on the modification of vehicles kinematic
values (e.g. position, velocity, acceleration and jerk:
third derived from of position). In addition, the
update of the vehicles time table is not done in real
time and the correspondence is not taken into
consideration.
Mohamed Mahmoud Ould Sidi (Mohamed, M.,
2006) proposes in his thesis a resolution method that
takes adequate measures regulations for each
incident. The method used is based on evolutionary
algorithms with the theory of sub-assemblies and
fuzzy integrals. Nevertheless, his method does not
address punctuality, regularity, and feasibility.
2.2 Approaches based on SMA
2.2.1 Regulation of Traffic Lights
(Sofiane, H., Neïla, B., 2010) (Neila, B., Lotito, P.,
2005) (Neïla B., Flavien, B., Suzanne, P., Mohamed,
T., 2011) The objective of these approaches is to act
on the traffic lights durations to regulate traffic of
private cars and public transport mainly buses. They
only address the traffic lights regulation in a normal
state in order to adjust the regularity criteria. But, the
correspondence and the punctuality are not treated.
Also, they don’t deem a real cause of the disturbance
and don’t address the multi-modality network.
2.2.2 Regulation using Evolutionary
Approaches
Flavien Balbo (Flavien, B., Scema, G., 2000)
propose a multi-agent representation based on
"Property-based Coordination Principle" (PbC). The
objective of this approach is to solve three recurring
problems in the design of solutions related to
knowledge, space-time dimension and the real
environment dynamics. The tests show the
importance of multi-agent representation. However
the three main criteria (punctuality, regularity and
correspondence) are not explicitly covered in this
approach.
Fayech (Fayech, 2003), presents the regulation as
a reallocation of schedules and itineraries for
vehicles affected by the disturbance. This approach
requires Hamiltonian paths to ensure the feasibility
of the allocated itineraries. However, this technique
doesn’t deal with traffic regularity. Furthermore, the
decision to change or allocate new itineraries can
cause problems for the correspondence.
Bouamrane (Karim, B., Bonte, T., Sevaux, M.,
Tahon, C., 2005) presents a regulation model that
details the cognitive activities in the regulation
process. The decision is integrated in an interactive
environment, but it is based only on punctuality.
Laichour (Laichour, 2002), proposes to regulate
only the correspondence problem by using a limited
number of actions.
Soulhi (Soulhi, 2000) proposes a fuzzy model
technique. His model is based on the regulator
experience. This technique provides only synthetic
results and deals only with the punctuality issue.
2.3 Discussion
Most of the existing works have limits for the public
transport regulation:
They don’t take into account perfectly the major
criteria that have to be optimized in a public
transport regulation: punctuality, regularity and
correspondence.
The majority of works don’t address the public
multimodal transport (bus, metro and tram)
The majority of works take account only the
information related to passengers like waiting
time in station, frequency of coming passenger,
destination of passenger, etc. It is difficult to
collect and manipulate this information.
They can’t handle multiple disturbances
simultaneously.
They don’t detect on time the disturbance.
They don’t ensure a follow up of the regulation
action impact in order to update the information
system on real-time and develop its expertise in
regulation.
Hence, our goal is to implement a Regulation
Support System of Public Transport (RSSPT) that
Multi-agentModellingforaRegulationSupportSystemofPublicTransport
625

overcomes theses limits. For this, we rely on a multi-
agent approach. This orientation is explained in the
next section.
3 MULTI-AGENTS APROACH
AND REGULATION SUPPORT
SYSTEM
In this section we describe the regulation public
transport domain characteristics and we show how
each of these characteristics can be handled by a
multi-agent approach. The regulation public
transport is:
Distributed: The geographical distribution of
information over the network for vehicles and
stations requires distributed agents. Each agent
has its own information in order to reflect the
real current state of the public transport network.
For example, when vehicles breakdown or there
are delays or accidents.
Dynamic: it is the daily change of information
concerning the management of public transport.
The system must then use agents able to
continually modify their states and automatically
adapt to dynamic changes in the environment.
For example, a vehicle agent can move forward,
slow down, accelerate and negotiate its passage
with other agents like stations.
Open: The state of public transport networks
changes continuously. E.g. the appearance of
incidents or the number of vehicles becomes
large. Hence the system must manage agents
who can enter and exit freely. For example, add a
new regulator agent when a disturbance appears
and add a large number of vehicle agents to
simulate congestion situation.
Heterogeneous: The actors of Regulator
Support System are varied. The use of a multi-
agent approach allows modeling agents with
different behaviors and different granularities.
For example, vehicle, station, regulator, etc.
Complex: this domain requires entities with
complex nature. These entities can reason and
communicate via messages to solve problem. For
example, each regulator can manage and makes a
decision, and each vehicle can communicate with
station to give some information like passage
time.
Therefore, multi-agents system sweets well the
public transport network domain. Hence our
modelling is based on agents able to communicate,
cooperate and negotiate to detect and resolve
disturbances.
4 SUPPORT REGULATION
SYSTEM MODELLING
4.1 Objective
Our goal is to provide a regulation support system of
public transport (RSSPT). This system is based on
Multi-agents approach. It is designed to detect and
regulate disturbance of public transport by taking
into consideration the major criteria for traffic
regulation: punctuality, regularity, and
correspondence. Furthermore, this modelling should
simultaneously treat many disturbances and consider
the multimodal aspect of the system (bus, metro, and
tram) as well as the type of vehicles (passenger,
school, commercial, etc.). The mode of transport is
important to treat the feasibility; also the type of
vehicle is useful to define the significance of the
criteria (punctuality, regularity or correspondence)
in the evaluation disturbance.
Our system is based on the system presented by
Karim Bouamrane, (Karim, B., Bonte, T., Sevaux,
M., Tahon, C., 2005). It is subdivided into three
modules: the disturbance acquisition, the regulation
and the evaluation module.
4.2 The Functional Model
The following figure describes the different phases
in the decision-making process of the regulation (see
figure 1).
In the first phase, the system supervises the
network. It collects information from the operating
support system of the public transport network to
locate vehicles. After that, it detects disturbances
and evaluates its impact on network activity by
computing utility function based on punctuality,
regularity and correspondence. This function is
inspired by the work of Catholijn who presents a
prototype system for negotiation about cars
(Catholijn, Jonker, Treur, 2001).
In the regulation phase, the system analyzes
detected disturbances by defining the type of risk
(risk of a vehicle train and / or the risk of a gap). It
produces diagnostic and the current state of the
network. According to the diagnostic the regulator
establishes solutions following an optimization of
the utility function and takes the adequate decision
for example to increase or to decrease the number of
vehicle provided for part of the network, to
accelerate or decelerate vehicle, etc.
ICEIS2015-17thInternationalConferenceonEnterpriseInformationSystems
626

Figure 1: The functional model of the RSSPT.
Finally, there is the evaluation. The model
chooses the regulation action according to its
feasibility and controls it in public transport
network.
4.3 Multi-agent Architecture
The different agents of our architecture are described
in figure 2.
Figure 2: Multi-agent Architecture of the RSSPT.
Our architecture is based on multi-agent
approach where agents include domain knowledge.
Their interactions are based on the environment
state. To achieve our RSSPT we design agents that
store data from a theoretical time table and reflect
the current state of the network (station and vehicle)
as well as agents that calculate and evaluate
disturbance and solution for the three criteria:
punctuality, regularity and correspondence.
4.3.1 Agent Modelling
Station Agent: is related to one or more lines.
Each agent must memorize all theoretical times
and real times of vehicles passage. It calculates
continuously the waiting time of each coming
vehicle V
R_v
. It is equal to:
V
R_
v =
T
C -
T
T
_
v
(1)
With T
C
is the Current time and T
T_v
is the
theoretical time of coming vehicle. After that, it
provides the necessary information to agent
punctuality, regularity and correspondence so
they calculate their criteria value.
Vehicle Agent: is characterized by mode (bus,
metro or tram), position, speed, capacity, number
of passengers, line which affected, mission
(academic, commercial or passenger), driver,
remaining work time, etc. When a vehicle passes,
it provides to the station a passage time, number
of passengers descended and number of
passengers mounted. Also, it gives continuously
to the operating support system via GPS its
position. This information is stored to enrich the
knowledge base of the system. Also, each agent
vehicle is related to each criteria agent who use
these information to calculate its criteria value.
Punctuality Agent: calculates its criteria value
V
p
as follows:
V
p
= (T
C
+
Rt
)- T
T
_v
(2)
With
Rt
is the remaining time needed to the real
time of vehicle passage. This remaining time
must take into account the traffic state and the
mode of transportation.
Regularity Agent: calculates its criteria value V
r
as follows:
V
r
= V
p
-
T
R_
v
_
behind
(3)
The T
R_v_behind
is the real time of behind vehicle
passage (see figure 3).
When V
r
value is less than vehicle frequency, it
means that there is a risk of a vehicle train.
Otherwise we deduce that there is a risk of a gap.
Figure 3: Calculation of the regularity criteria value.
Multi-agentModellingforaRegulationSupportSystemofPublicTransport
627
Correspondence Agent: calculates its criteria
value V
c
. It is equal to:
V
c
= ∑ f
i
(
i_v_c
)
(4)
Here f
i
represents the waiting time factor of ith
corresponding vehicle. This factor indicates the
importance weight of the corresponding vehicles
in the calculation of the regulation solution. It is
necessary that ∑ f
i
= 1. And
i_v_c
represents
waiting time of ith corresponding vehicle. It is
equal to:
i_v_c
= V
p
– T
i_v_c
(5)
With T
i_v_c
represents the real time of the ith
corresponding vehicle passage to the transfer
station.
Regulator Agent: Each vehicle has regulator
agent that continuously receives the criteria
values calculated by the agent’s punctuality,
regularity and correspondence. Then the
regulator calculates the utility function according
to three criteria (punctuality, regularity and
correspondence).
U= ∑ (W
i
.V
i
) with O={p,r,v} (6)
Here the weights W
i
are relative to the
importance of the different criteria. E.g.
punctuality for school bus is more important than
the passenger bus, against keeping good
correspondence is more interesting for passenger
bus than school bus. The weights values are
between 0 and 1 and It is necessary that
∑ W
i
=1 with O={p,r,v}.
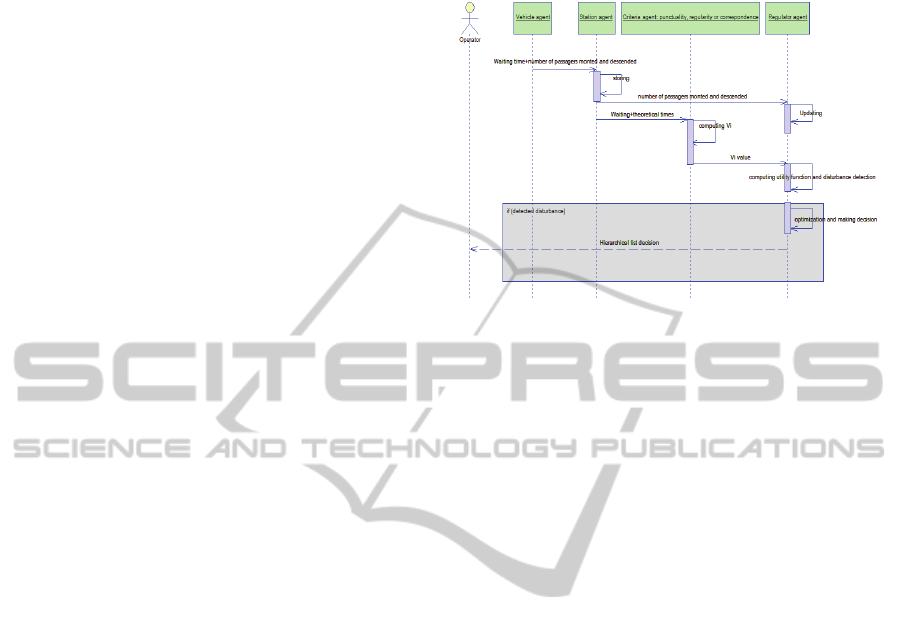
4.3.2 Dynamic Modelling
We describe dynamic view of our model by using
the sequence diagram (see figure 4).
Each station knows the position station from the
operating support system and calculates the waiting
time from each coming vehicle and sent it to criteria
agent. So, each criteria agent calculates its criteria
value and sent it to the regulator agent. After that,
the regulator agent calculates the utility function. If
the value of this function falls into a critical values
space, the regulator starts the regulation phase. In
this step the regulator use its expertise to optimize
the utility function and produce a hierarchical list of
feasible decision. This list is inspired from the work
of Z. Salah (Salah, Z., 2007). After that it sent this
decision list to the operator. The operator maximizes
the solution satisfaction degree and respects the
decision feasibility. The value of this function must
be as minimal as possible. It is the value of the
theoretical utility function.
Figure 4: Sequence diagram of the RSSPT.
At the end, the operator chooses the appropriate
regulation action decision from this list. After that,
the system updates its knowledge base, and updates
the information of operating support system. We
note that each vehicle has a regulator that operates
independently of other regulators.
A unique characteristic of this model is that the
same agents and data are used to ensure the three
phases of our RSSPT: acquisition, regulation and
evaluation. This makes the model simpler and solves
the problem of data duplication.
In addition this architecture detects the
disturbance on time and ensures self-organization
among the different agents to achieve a collective
goal. Furthermore, the regulation can deal with
many disturbances at the same time and the solution
is taken into account a real time.
5 SIMULATION AND RESULT
We applied this work to scenario based on a real
transportation system existing in Abu Dhabi. We
used an algorithm with a line 008 which has
frequency bus 20 minutes (regularity). A disruption,
due to a traffic accident between two cars, slows
down bus. The delay of the disrupted bus at its
arrival to the Bateen station is estimated 7 minutes:
We estimate that there are 4 minutes for the coming
bus to arrive at station (
Rt=
4) and 3 minutes that the
coming bus not comes yet at 10h: 33min. The
disrupted bus has two correspondences lines 009 and
010. We assume that there is no disturbance on the
behind bus. To calculate the correspondence criteria,
we assume that all corresponding bus have the same
importance in the transfer station (f
1
=0.5 and f
2
=0.5).
i
O
i
O
n
i=1
ICEIS2015-17thInternationalConferenceonEnterpriseInformationSystems
628

According to the theoretical time table presented
in the following table (see table 1), each criteria
agent calculates its criteria value as following: V
p
=7,
V
r
=27 and V
c
=15. The regulator agent calculates also
the utility function: U=16.86. We want to find
regulation that minimizes this value. Note that the
optimal value is equal to theoretical value=8.58.
Table 1: Times of bus passage at Bateen station.
Line Theoretical
time at station
Real time
at station
Frequency
008 10h: 30min 10h: 37min 20
009 10h: 23min 10h: 23min 20
010 10h: 25min 10h: 25min 20
After analysis of the situation, the system
recommends that the better action regulation is a
deviation: change the road of the disruption bus
without skip stations. In this case the disrupted bus
comes 3 minutes earlier and the utility function
value becomes equal to 10.23 with V
p
=4, V
r
=24 and
V
c
=3. We deduce that the utility function is simple to
use and a good way to optimize the regulation
action.
6 CONCLUSION AND FUTURE
WORKS
In this paper, we presented a Regulation Support
System of Public Transport (RSSPT) based on a
multi-agent approach. Unlike other works, our
model takes into account the punctuality, regularity
and correspondence. These criteria are detected and
regulated at the same time when several disturbances
appear simultaneously. Moreover, this RSSPT deals
with multimodal traffic of public transport
The objective of this research is to improve the
passenger quality service of public transport. In our
approach, regulation of public transport is
distributed and obtained thanks to communication,
collaboration and negotiation between
heterogeneous agents. Firstly, we explained shown
that existing approaches of support system
regulation present several limits. Secondly, we have
presented how we used multi-agents approach in our
modelling. Thirdly, we described our multi-agent
strategy that computes utility function on witch
making decision is based. This function is based on
the real condition of traffic situation and takes into
account criteria: punctuality, regularity and
correspondence.
The first experimentation shows that our RSSPT
can sort the different feasible regulation actions
according to the utility function value. The
implementation is in progress using a multi-agents
platform JADE. A deeper validation will be done
using with a real value of the traffic network.
REFERENCES
Flavien, B., Scema, G., 2000. Modélisation d’une
perturbation sur un réseau de transport : le modèle
Incident, IAE – 15.
Flavien, B., Suzanne, P., 2005. Decision Support Systems,
Volume 41, Issue 1.
Neïla, B., Flavien, B., Suzanne, P., Mohamed, T., 2011.
IEEE/WIC/ACM, International Conferences on Web
Intelligence and Intelligent Agent Technology, wi-iat,
vol. 2, pp.
Flavien, B., 2010. Modélisation d’une perturbation sur un
réseau de transport : le modèle Incident, HH Cheng -
Intelligent Transportation Systems, IEEE.
Salah, Z., 2007. Thesis, SARR: Système d’Aide à la
Régulation et la Reconfiguration des Réseaux de
Transport Multimodal.
Mohamed, M., 2006. Thesis, Contribution à l’amélioration
des systèmes d’aide à la décision pour la régulation du
trafic dans les réseaux de transport collectif.
Neila, B., Lotito, P., 2005. An intermodal traffic control
strategy for private vehicule and public transport. 10th
Euro Working Group on Transportation Poznan
Poland.
Sofiane, H., Neïla, B., 2010. Régulation du trafic urbain
avec une priorité aux transports en commun a l’aide
d’un système multi-agents, 8e Conférence
Internationale de MOdélisation et SIMulation -
MOSIM’10.
Sofiene K., 2010. Thesis, Commande et optimisation pour
la régulation du traficurbain multimodale sur de
grands réseaux urbains.
Fayech, 2003. Thesis, Régulation des réseaux de transport
multimodal : Systèmes multi-agents et algorithmes
évolutionnistes.
Laichour, 2002. Thesis, Modélisation Multi-agent et aide
à la décision: application à la régulation des
correspondances dans les réseaux de transport urbain.
Hartani, 95. Thesis, Modélisation des systèmes fous :
Contributions théoriques et applications.
Catholijn, Jonker, Treur, 2001. An Agent Architecture for
Multi-Attribute Negotiation. In Nebel, B., 17th
International Joint Conference on AI, IJCAI’01.
Karim, B., Bonte, T., Sevaux, M., Tahon, C., 2005. SART:
un système d’aide à la décision pour la régulation d’un
réseau de transport bimodal, LAMIH/SP, UMR-CNRS
8530.
Multi-agentModellingforaRegulationSupportSystemofPublicTransport
629
