
Towards a Novel Engine to Underlie the Data Transmission of Social
Urban Sensing Applications
Carlos Oberdan Rolim
1
, Anubis Graciela de Moraes Rossetto
1
, Valderi R. Q. Leithardt
1
,
Guilherme A. Borges
1
, Tatiana F. M. dos Santos
2
, Adriano M. Souza
2
and Claudio Geyer
1
1
Institute of Informatics, Federal University of Rio Grande do Sul (UFRGS), Porto Alegre, RS, Brazil
2
Postgraduate Program in Production Engineering, Federal University of Santa Maria (UFSM), Santa Maria, Brazil
Keywords:
Urban Sensing, Smart Cities, Opportunistic Networks, Machine Learning, Prediction, Situation Awareness.
Abstract:
Social urban sensing is a new paradigm which exploits human-carried or vehicle-mounted sensors to ubiq-
uitously collect data for large-scale urban sensing. A challenge of such scenario is how to transmit sensed
data in situations where the networking infrastructure is intermittent or unavailable. In this context, this pa-
per outlines the early stages of our research which is concerned with a novel engine that uses Opportunistic
Networks paradigm to underlie the data transmission of social urban sensing applications. It applies Situation
awareness, Neural Networks and Fuzzy Logic for routing and decision-making process. As we know, this is
the first paper to use such approaches in Smart Cities area with focus on social sensing application. As well as
being original, the preliminary results from our simulations signals the way that further research can be carried
out in this area.
1 INTRODUCTION
Smart Cities are urban systems that use Information
and Communication Technologies (ICT) to provide
an infrastructure and public services within a more in-
teractive, accessible and efficient city (Pellicer et al.,
2013). As a result, researchers are seeking alterna-
tives to serve citizens with new services to improve
their quality of life and to fulfill the criteria of energy
efficiency and sustainability. In this way, urban sens-
ing applications emerges as a promising way to im-
prove the comprehension of such urban ecosystems in
order to assist the decision-makers in the organization
of the city and the welfare of its residents.
In this context, an important question is how to
foster citizen participation and community involve-
ment to achieve a better interaction with the urban
ecosystem. Among these initiatives, social urban
sensing applications are a promising way to pro-
mote the sensing of data about different aspects of
cities, bringing the computational world and commu-
nity closer together.
A challenge for social urban sensing applications
is how to transmit sensed data in situations where the
networking infrastructure is intermittent or unavail-
able. We argue that Opportunistic Networks is an
alternative to overcoming such limitations. Oppor-
tunistic Network is a recent and promising mobile net-
working paradigm that stem from research into con-
ventional Mobile Ad Hoc NET-works (MANET) and
uses contact between mobile nodes to transmit data
(Boldrini et al., 2010).
In this paper, we outline the early stages of our
research on a novel engine that uses Opportunistic
Networks paradigm to underlie the data transmission
of social urban sensing applications. It applies Situ-
ation awareness, Fuzzy Logic and Neural Networks
for routing and decision-making process. This en-
gine will be used as an internal Communication com-
ponent in our Ubiquitous Service-Oriented Architec-
ture for Urban Sensing called UrboSenti (Rolim et al.,
2014). We are based on the hypothesis that a non
“IP-Centric” paradigm like Opportunistic Networks
in conjunction with contextual and intelligent ap-
proaches could supply the requirements of data trans-
mission in wide-scale urban scenarios. In summary,
the main contributions made by this paper are the ar-
chitecture of the engine and the conceptual models
used as guidance for its development. As we know,
this is the first paper to use such approaches in Smart
Cities area with focus on social sensing application.
The rest of this paper is structured as follows: The
662
Oberdan Rolim C., Graciela de Moraes Rossetto A., R. Q. Leithardt V., A. Borges G., F. M. dos Santos T., M. Souza A. and Geyer C..
Towards a Novel Engine to Underlie the Data Transmission of Social Urban Sensing Applications.
DOI: 10.5220/0005457406620667
In Proceedings of the 17th International Conference on Enterprise Information Systems (ICEIS-2015), pages 662-667
ISBN: 978-989-758-097-0
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

next section describes the motivational scenario and
raises some of the current computational challenges;
Section 3 describes the proposed architecture; Section
4 presents preliminary results from simulations, and,
finally, in Section 5 some conclusions are reached, to-
gether with recommendations for future research.
2 PROBLEM SCENARIO
Our research has been driven by the problem-scenario
that is shown in Fig. 1. This scenario includes a city
with several data sources that are being used for sens-
ing. Human-carried, fixed or vehicle-mounted sen-
sors are applied for obtaining sensing maps of tran-
sits, air quality, noise levels, temperature, CO2 con-
centration, etc. Moreover, data from social networks
in conjunction with sensors data are crucial to under-
stand the behavior of the city and to provide a holistic
view about it. To collect, analyze and give feedback
of sensed data acquired from several sources scattered
along the city, we are using our Ubiquitous Service-
Oriented Architecture for Urban Sensing called Ur-
boSenti. The main function of UrboSenti is to pro-
vide support for overall process of urban sensing. It
splits into two key modules: the Backend module and
Sensing module.
Figure 1: Problem scenario.
The Backend module runs in a data center infras-
tructure and, in short, is responsible for receiving
sensed data, processing it and giving feedback to the
citizens and other systems.
The Sensing module is responsible for social and
traditional sensing and encompasses activities of in-
tentional and non-intentional sensing. It runs in mo-
bile devices (e.g. mobile phones, embedded in ve-
hicles, etc) and in fixed sensors scattered around
the city. It has a several components that could be
plugged “on demand” and a micro-kernel with set of
components that are responsible for essential features.
Our focus is the internal micro-kernel Communica-
tion component. It provides methods to send and re-
ceive data by means of the available network infras-
tructure, such as IEEE 802.11b/g/n (structured and
ad-hoc), GPRS/EDGE/3G and Ethernet as the under-
lying system for TCP/UDP communications. When
the network infra-structure is intermittent or unavail-
able, it supports data communication using alternative
ways, not based in end-to-end paths (like used in IP
communications). In summary, the Communication
component is the “power-horse” of all communica-
tions tasks in the Sensing module.
Hence, we are seeking for an engine to be used
as underlying for communication of such component.
It should handle with fuzziness of wide-scale urban
scenarios and provide suitable support for data trans-
mission of urban sensing applications running atop of
UrboSenti. For such task, the requirements are: (i)
to use non “IP-Centric” paradigm for communication;
(ii) adapts itself the transmission parameters accord-
ing to device used for sensing and the current con-
text; (iii) made adaptation decisions proactively; (iv)
perform decisions using uncertain data; (v) concerns
with processing and power restrictions of devices.
In this way, we are based on the hypothesis that
non “IP-Centric” paradigm like Opportunistic Net-
works could be used for data carrying, satisfying req-
uisite (i); Situation awareness could be applied to
deal with context adaptations, satisfying requisite (ii);
Neural Networks could make predictions to support
adaptations, satisfying requisite (iii) and; Fuzzy Logic
could be used for decision-making about routing and
internal adjusts, satisfying requisite (iv). We highlight
that all approaches are suitable to run in low powered
devices, satisfying requisite (v).
3 PROPOSED ENGINE
A challenge for social urban sensing applications is
how to transmit sensed data in situations where the
networking infrastructure is intermittent or unavail-
able. We argue that Opportunistic Networks paradigm
could fulfill such gap. There are some initiatives in
Opportunistic Networks are
Our proposed engine is lying in Opportunistic
Networks area. There are some initiatives in such
area, like Epidemic, Spray&Wait (and the Spray
TowardsaNovelEnginetoUnderlietheDataTransmissionofSocialUrbanSensingApplications
663

variants like Spray&Focus, Fuzzy-Spray and others),
Prophet, BubbleRap, MobySpace, AFRON, Cartoon,
CAR, HiBOp, CiPRO, Propicman and the most recent
Prophet improvement called DRAFT. Due to space
limitation and paper scope we will not present more
information about these initiatives – for further infor-
mation see (Jedari et al., 2013). However, we re-
mark that none could handle all requirements pre-
sented above and cannot be used “as is” in our sce-
nario. Thus, in this section we will present our engine
architecture to overcome such limitations.
3.1 Situation Awareness Model
Situation-awareness (SAW) is a computing paradigm
by which applications use context data to sense and
comprehend the current situation and to project the
future demands. The first formalization of SAW was a
3-levels model proposed by Endsley(Endsley, 1995).
To deal with context adaptation in a proactive fashion,
our engine implements a Situation awareness model.
It is based in 3-levels model proposed by Endsley and
is outlined in Fig. 2.
Figure 2: Situation model.
This model uses internal and external context
about node to derive the low-level context that char-
acterizes current situation. A set of rules and past sit-
uations are used to project future situations that will
be used for routing decisions.
3.2 Prediction Model
The Prediction model (Fig. 3) is used to project fu-
ture situations. A recurrent Neural Network (NN) is
used for this purpose. We have chosen NN due to its
capacity to solve non-linear problems, it are universal
functions aproximators being suitable for prediction.
Each node is responsible to train and runs its own
instance of NN. With this approach we ensure that
Figure 3: Prediction model.
each node have a suitable NN to its needs. The cur-
rent and past low-level context data are used as input
for NN. It starts the Training phase, testing several
configurations from a configuration repository trying
to find the optimal Network (with lower Root Mean
Squared Error – RMSE). When a optimal Network is
found, it is used for prediction in Exploitation phase.
The outputs of this process are new predicted low-
level context data that probably characterize a future
situation of node. These data are used in decision-
making process. An essential requirement for NN in
this case, is a low computational cost due to power
and processing constraints of mobile nodes.
3.3 Decision Making Model
The decision-making process encompasses precise
and non precise context data (from current and pro-
jected future situation). So, conventional logic may
produce completely wrong decisions due to uncertain
of such data. An alternative to deal with imprecise
data is Fuzzy Logic. According to (Zadeh, 2008),
Fuzzy Logic is a viable alternative to reason and make
rational decisions in an environment of imprecision,
uncertainty, incompleteness of information, conflict-
ing information, partiality of truth and partiality of
possibility. Thus, to perform decision-making pro-
cess, a Fuzzy Inference System (FIS) is used (Fig.
4). Context values (current and future) are pumped as
input to FIS and after internal calculation (by usage
of membership functions and fuzzy rules) the output
is the potential of a node to be a good “data mule”
(a term used in Opportunistic Network to designate
a node that will carry a message). This information
will be used to decide when to forward messages to
encountered node. The decision-making process also
runs to decide if some internal parameters needs to be
adjusted.
ICEIS2015-17thInternationalConferenceonEnterpriseInformationSystems
664
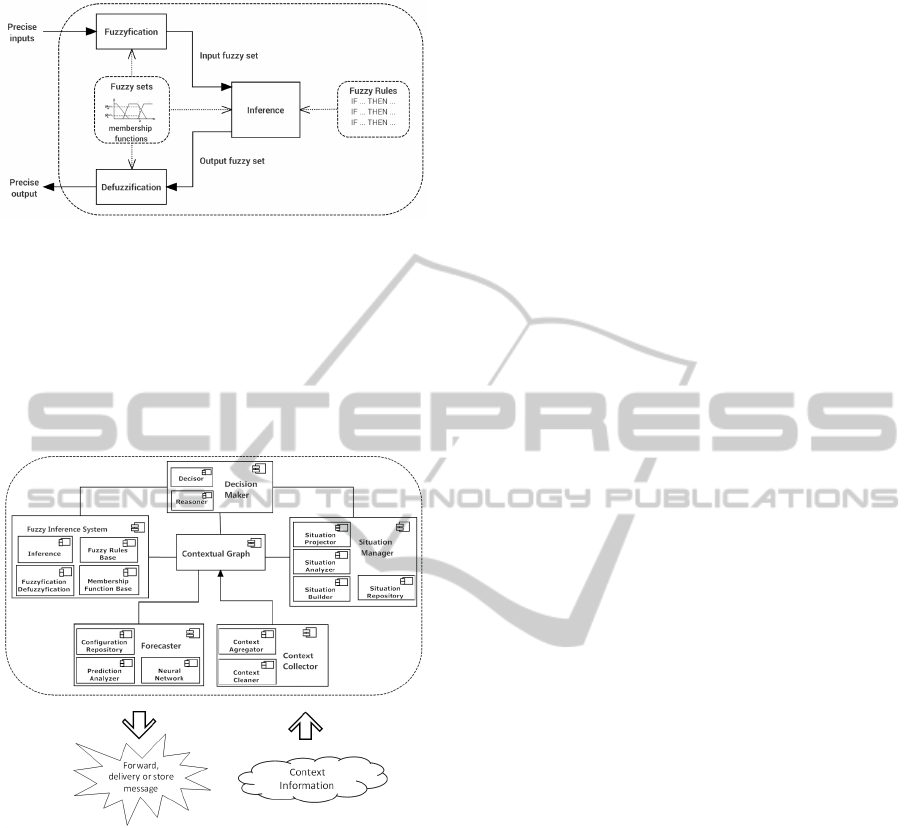
Figure 4: Decision making model.
3.4 Engine Architecture
The above presented models are used by our engine.
Its internal architecture features are outlined in Fig. 5
and its behavior is explained below. Again, we high-
light that due to space limitation we will not fully ex-
plain each component.
Figure 5: Engine architecture.
It starts with the Contextual Information that rep-
resenting information about the context of node. At a
constant time interval, Context Collector collects the
data and stores them in a layered structure called Con-
textual Graph, thus creating a new Layer 2 vertex.
The Contextual Graph component underlies all
the data storage. Its main function is to store instan-
taneous and predicted context information. In Con-
textual Graph, the vertexes of the graph are struc-
tured in layers: Layer 1 stores basic information
about the node (i.e. node name, address, network
interfaces). Layer 2 stores instantaneous context in-
formation about the node (i.e. node power, current
position, buffer usage, number of messages, current
time, speed, distance traveled from last point, num-
ber of reachable neighbors) that will be used as his-
torical values to prime the Forecaster. Layer 3 stores
predicted context values from Forecaster. Moreover,
we used edges to represent the contacts between the
nodes.
The Situation Manager component, implements
our Situation awareness model. It draws on data from
Contextual Graph to build, analyze, project and cre-
ate a repository of situations. The information gener-
ated by this module will be used later by the Decision
Maker. It also runs maintenance routines like pruning
old data and invoking Forecaster for prediction. At
time intervals Situation Manager retrieve context data
from Contextual Graph and using a set of rules stored
in its internal situation repository it tries to identify
(build) the current node’s situation. The identified sit-
uation (e.g. “node is sensing with low battery power
and high buffer usage”) is analyzed, and if it indicates
that some action needs to be done it is reported to De-
cision Maker. If a situation could not be identified, an
unknown situation is found. Thus, a new set of rules
that characterize this situation is created “on the fly”
and stored in repository for future use. When the Situ-
ation Manager component detects a sufficient amount
of context information, it could project a future situ-
ation. For this purpose, the Forecaster component is
invoked.
Forecaster component implements our prediction
model, in order to predict the probable values that
will characterize a future situation. For such task, we
applied a lightweight network called Echo State Net-
work (ESN) proposed by Jaeger(Jaeger, 2001) is ap-
plied. ESN are a kind of three-layered recurrent net-
work with sparse, random, and (crucially), untrained
connections within the recurrent hidden layer (for fur-
ther and mathematical foundation please read original
Jaegers paper). The main difference between the ESN
and other neural networks is that only the weights of
the reservoir output signals are trained. The weights
of the connections within the reservoir are not trained
but are randomly generated. This approach signifi-
cantly reduces the learning process when compared
with other algorithms (e.g. back propagation through
time) resulting in low computational cost to imple-
ment it(Fink et al., 2013). The Forecaster compo-
nent, uses context values stored as Layer 2 in Contex-
tual Graph as historical data to train ESN (i.e. node
power, current position, etc.). Due to its low com-
putation cost to train the neural network, we are able
to make each node of the network to builds its own
ESN with the most appropriate configuration for its
context. This is carried out by testing different inter-
nal parameters of ESN (i.e. size of reservoir, spar-
sity of the reservoir, spectral radius and leaking rate)
with different values until the best one (i.e. the one
TowardsaNovelEnginetoUnderlietheDataTransmissionofSocialUrbanSensingApplications
665

with minimal MSE) is found. When optimal neu-
ral network is found, its configuration is stored. At
this point, optimal network is ready to predict future
values in the exploitation phase. During exploitation
phase, the structure with historical data is used to
“pump” the best network (found and saved in previous
phase) with some data steps and thus to activate the
internal reservoir. Some stages later, the input from
the historical data is switched off to allow the network
to predict values by itself. The predicted values are
stored at Contextual Graph as Layer 3 vertices. At
this point, the component sets an internal variable to
indicate that the node is now running in smart mode.
In smart mode, all decisions done by Decision Maker
are made using past, current and predicted data in or-
der to improve data transmission. In “dummy” mode,
just current situation is used in decisions.
Decision Maker runs at constant time intervals to
decide if some internal parameters needs to be ad-
justed (such as buffer scheduling policy, maximum
size of messages, time to live of new messages, etc.)
or if a “trap” should be triggered to require atten-
tion of an external component of micro-kernel (e.g to
change configuration of network interface, to perform
some adaptation action, etc.). All decisions are made
using decision making model presented above in sec-
tion 3.3. Decision Maker is also invoked when current
node contact another node to decide if some buffered
message should be forwarded, delivered or remain at
the local buffer. In simple terms, Decision Maker de-
cides if the encountered node is a good “data mule”.
We used the term “potential” to represent the capacity
of the node to be a good data mule. The strategy used
is quite simple: if the potential of the contacted node
is greater than the potential of the current node, then
the message is forwarded; otherwise, the message re-
mains at the local buffer (obviously the message is
delivered if the encountered node is its destination).
The question arising from this approach is: how to
calculate the potential of each nodes? For this task,
all context values (current, historical and predicted)
of the current and contacted node from Contextual
Graph and use it as input for the Fuzzy Inference Sys-
tem (FIS). FIS uses its internal components and rules
to calculate the potential of each node. The potential
values of nodes are used by Decisor in decision mak-
ing process.
4 PRELIMINARY RESULTS
To verify the functionality and performance of pro-
posed engine we implemented some main modules
and carried out some simulations using ONE (Oppor-
tunistic Network Environment) Simulator. For simu-
lation setup we adopted 6 hours for all scenarios with
a different number of nodes (10 for the first, 25 for
the second, and 50, 75 and 100 for each consecu-
tive group). We used two groups: pedestrians and
cars with ShortestPathMapBasedMovement as mo-
bility model. Pedestrian nodes moved between 0.5
and 1.5 Km/h, and had a Bluetooth device with a ra-
dio range of 20 meters and transmission speed of 2
Mbit/s. The Car nodes moved between 10 and 50
Km/h and had a Wi-Fi interface with a range of 50
meters and transmission speed of 10 Mbit/s. On aver-
age, the nodes generated about one message every 25
to 35 seconds (total of 711) and the message lifetime
was set at 24 minutes (1440 seconds). We used mes-
sage sizes that were uniformly distributed between
100 KB and 2 MB.
In implementation of engine, we used ESN-
Java software
1
to build Forecaster and JFuzzyLogic
library
2
in the Fuzzy Inference System used by
Decision-Maker. The following context data was
used: current power, current speed, total distance
traveled from last point, overall distance traveled, cur-
rent coordinates, last coordinates, current buffer us-
age, current number of carried messages, total num-
ber of forwarded messages, current number of neigh-
boring nodes, and total number of connections. To
calculate the variable “potential” which is used as the
output of FIS, three Triangular membership function
are used. The COG (Center Of Gravity) was used as
a defuzzification method. The fuzzy inference rules
were defined in compliance with Fuzzy control lan-
guage (FCL).
We conducted a set of experiments using simula-
tion setup presented above with different scenarios.
The results are displayed in Fig. 6. This shows that
in general, there is an increment in the number of de-
livered messages that corresponds to the increment of
the number of nodes.
Figure 6: Performance in scenarios with different number
of nodes.
1
http://www.wsi.uni-tuebingen.de/lehrstuehle/cognitive-
modeling/code/overview.html
2
http://jfuzzylogic.sourceforge.net/
ICEIS2015-17thInternationalConferenceonEnterpriseInformationSystems
666

The scenario with 100 nodes had a increment of
245% in number of delivered messages in relation to
scenario with 10 nodes, but with just 134% of more
overhead (an assessment of bandwidth efficiency in
relation of the number of relayed and delivered mes-
sages). This overhead percentage is less than in sce-
nario with 50 and 75 nodes. We believe that this ra-
tio can be attributed to our strategy of just relaying
messages to data mules with a good potential to de-
livery the message. Furthermore, we can note that
with increment of number of nodes, each one could
store more historical context data to be used by Fore-
caster for prediction. With this, the predictions be-
comes more accurate over the time. In other words,
the engine becomes smarter when run more time and
with more neighbors nodes. We need to investigate
why with 50 nodes the number of delivered messages
was less than with 25 nodes. I As final remark, one
factor not reported in the chart is the computational
cost of ESN. Even when each node used in the sim-
ulation testing, had, on average, 810 different config-
urations to find the best network, the impact of the
processor load was minimal. This lightweight fea-
ture was the main differential of ESN when compared
with all the other machine learning approaches that
we have tested in our previous work.
5 CONCLUSIONS
In this paper, we have described the early stages of our
attempt to build a novel engine that applies Oppor-
tunistic Networks paradigm to transmit sensed data in
situations where the networking infrastructure is in-
termittent or unavailable. It runs as an internal com-
ponent of a wide architecture called UrboSenti and
provides support for communication of urban sensing
applications running atop of it.
We have also outlined our initial design models
for the software modules and their internal compo-
nents. The development of engine has been started.
Currently we are mainly working to implement Situ-
ation awareness model and to plug it with other com-
ponents. The preliminary results, without situation
awareness, are acceptable and indicates that our initial
hypothesis could be exploited better. The low com-
putational cost to run it with satisfactory number of
delivered messages has shown that it works and have
a good potential to be used in UrboSenti. We believe
that its performance will be improved when imple-
mentation of Situation Manager is finished.
Thus, we claim that the proposed engine at-
tend our requirements and is able to fill the gap of
data transmission presented in our initial problem-
scenario. Moreover, this should encourage us to con-
duct further research into the multidisciplinary area of
Smart Cities with the aim of improving services and
applications for urban sensing.
For future work, we are seeking alternative means
of constructing fuzzy sets and rules “on the fly”, de-
pending on the situation in which the node is im-
mersed and to explore the application of a Deep Belief
Network (DBN) or Restricted Boltzmann machines
(RBMs) as underlying for prediction.
ACKNOWLEDGEMENTS
We would like to give special thanks to Johannes
Lohmann of Universit
¨
at W
¨
urzburg for his help with
source code of ESNJava.
This research was supported under UbiArch project
– Ubiquitous Architecture for Context Management
and Application Development at UFRGS.
REFERENCES
Boldrini, C., Conti, M., and Passarella, A. (2010). Design
and performance evaluation of ContentPlace, a social-
aware data dissemination system for opportunistic
networks. Computer Networks, 54(4):589–604.
Endsley, M. R. (1995). Toward a Theory of Situation
Awareness in Dynamic Systems.
Fink, O., Zio, E., and Weidmann, U. (2013). Anticipating
Railway Operation Disruption Events Based on the
Analysis of Discrete-Event Diagnostic Data. Ehem-
ical Engineering Transactions, 33:715–720.
Jaeger, H. (2001). The echo state approach to analysing
and training recurrent neural networks. Technical re-
port GMD report 148. Technical report, German Na-
tional Research Center for Information Technology.
Jedari, B., Xia, F., and Member, S. (2013). A Survey on
Routing and Data Dissemination in Opportunistic Mo-
bile Social Networks. IEEE Communications Surveys
and Tutorials.
Pellicer, S., Santa, G., Bleda, A. L., Maestre, R., Jara, A. J.,
and Skarmeta, A. G. (2013). A Global Perspective
of Smart Cities: A Survey. 2013 Seventh Interna-
tional Conference on Innovative Mobile and Internet
Services in Ubiquitous Computing, pages 439–444.
Rolim, C., Rossetto, A., Leithardt, V. R. Q., Borges,
G., dos Santos, T. F. M., Souza, A., and Geyer,
C. F. R. (2014). Towards a Ubiquitous Service-
Oriented Architecture for Urban Sensing. In ASE
BIGDATA/SOCIALCOM/CYBERSECURITY Confer-
ence. Academy of Science and Engineering (ASE),
USA, ASE 2014.
Zadeh, L. a. (2008). Is there a need for fuzzy logic? Infor-
mation Sciences, 178(13):2751–2779.
TowardsaNovelEnginetoUnderlietheDataTransmissionofSocialUrbanSensingApplications
667
