
Experimenting an Embedded-sensor Network for Early Warning of
Natural Risks Due to Fast Failures along Railways
Andrea Fantini
2
, Massimo Magrini
1
, Salvatore Martino
2
, Davide Moroni
1
, Gabriele Pieri
1
,
Alberto Prestininzi
2
and Ovidio Salvetti
1
1
Institute of Information Science and Technologies, National Research Council, Via Moruzzi, 1, Pisa, Italy
2
Department of Earth Sciences and Research Centre for Geological Risks (CERI), University of Rome “Sapienza”,
Piazzale Aldo Moro, 5, Rome, Italy
Keywords: Real-Time Imaging, Embedded Systems, Natural Risk Monitoring, Fast Failures, Railway Monitoring.
Abstract: This paper deals with a project for real-time monitoring of railway tracks to detect events, such as fast
failures from natural risks, which may threaten the transit of trains. The paper describes a network of smart
sensors for early warning of these endangering events. Three main types of fast-failure events involving
railways were identified: sinkhole, rock and debris falls. A case study on a known test site and
experimentation with various scenarios were carried out with a view to developing algorithms capable of
spotting and localising them. Results demonstrate the good performance of the network in monitoring the
investigated events.
1 INTRODUCTION
In the last decade, particular attention was focused
on the monitoring of fast to very fast failures, which
include landslides from rocky slopes (e.g. falls,
topples and wedge sliding), but also sinkholes on
plains and debris flows channelled along high-
inclination slopes. The relevance of such events is
mainly related to the short time available for taking
action in case of exposed infrastructures (highways,
railways and so on), since no significant
displacements are generally detected before failure.
In this regard, two are the possible strategies to
manage the natural risk: i) monitoring precursors by
using micro- or nano-seismometric devices as well
as of acoustical emission records (Amitrano et al.,
2005; Lenti et al., 2012); ii) monitoring the site as
well as the exposed infrastructures, by using optical
devices (e.g. cameras, interferometers, videos)
capable of detecting fast morphological changes or
abnormal and unexpected objects hazardous for the
infrastructure (Antonello et al., 2004; Lai et al.,
2006; Gaffet et al., 2010; Bigarre et al., 2011;
Martino and Mazzanti, 2014).
Integrated monitoring systems should be
designed for this purpose and adapted to meet the
following requirements: i) investigating or detecting
the site at different evolutionary stages (forward
prevention), corresponding to different distributions
of the landslide hazard; ii) understanding and
controlling the parameters for forecasting the short-
term evolution of gravitational instabilities (e.g.
high-velocity landslides) and for planning alert
systems (real-time prevention).
Experiments were conducted on a railway where
a Wireless Sensor Network (WSN), with hardware-
connected cameras, had been installed. The WSN
was intended to detect morphological anomalies,
such as rocky slopes prone to falls, and the presence
of unexpected objects along the monitored railway
track. A WSN, which can transmit real-time data,
can provide an early warning system.
The experiments were carried out by artificially
causing block falls and localising them along the
railway. The experiments were part of a research
project, implemented by the Research Centre for
Geological Risks (CERI) of the University of Rome
“Sapienza”. The project will include new sites to be
monitored, where natural ongoing processes can be
detected. The end goal of the research is to integrate
the WSN into a multi-sensor network for detecting
natural fast-landslide processes from precursors to
failure.
85
Fantini A., Magrini M., Martino S., Moroni D., Pieri G., Prestininzi A. and Salvetti O..
Experimenting an Embedded-sensor Network for Early Warning of Natural Risks Due to Fast Failures along Railways.
DOI: 10.5220/0005462200850091
In Proceedings of the 5th International Workshop on Image Mining. Theory and Applications (IMTA-5-2015), pages 85-91
ISBN: 978-989-758-094-9
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

2 ISSUE AND ANALYSIS
The infrastructure chosen for the project was a
railway; in particular, some railway tracks with
limited train transit (secondary railways) in Central
Italy were selected. The experimental activity
consisted in monitoring the railway and the
surrounding area, in order to derive a real-time
report of obstacles hazardous for train transit. In the
selected site, three different types of fast failure may
affect the railway:
- Sinkholes: fast vertical collapses generating
holes of variable diameter below the railway causing
its interruption or flexion. The expected precursor
signals are micro- or nano-seismic emissions due to
micro-cracks that anticipate the collapse phase and
preliminary deformations of the ground surface that
may affect the railway track.
- Rock falls: these fast landslides generally occur
on cliff slopes (natural or man-made) due to rock
mass jointing. They cause the accumulation of rocky
blocks of variable size that may occupy and/or
damage the railway infrastructure. In this case, the
expected precursor signals are micro- or nano-
seismic emissions due to micro-cracks that
anticipate the collapse phase but rarely are
preliminary and detectable deformations observed.
- Debris flows: this phenomenon consists in the
fast triggering of a flow-like event due to a mixture
of water, air and debris originally accumulated along
narrow and deep creeks elongated on high-dip
slopes. The velocity and volumes of the flowing
debris can produce severe damage to infrastructure
due to impact energy as well as debris accumulation.
The predisposing conditions for debris-flow
triggering are the presence of debris fill along the
creek when intense rainfall occurs.
The most suitable site for experimenting a
monitoring system meeting the above requirements,
i.e. detecting the occurrence of fast failures, should
make it possible to:
• detect deformations or abnormal objects
along the railway in real time;
• provide multiple points of observation;
• measure the observed objects;
• transmit the detection dataset in real time;
• ensure the interaction between the
wireless-connected sensors.
As a preliminary action, the WSN should be
calibrated to better identify any “regular” objects
statically or dynamically located on the railway, e.g.
trains in transit, animals running or existing
vegetation. The sensors should also be capable of
filtering spurious noise generated by system
instabilities, e.g. vibrations induced by regular
railway traffic.
2.1 Methodology
The pilot sites were selected after field surveys
aimed at assessing their suitability for the planned
experiments in terms of both expected failure
occurrences and adequacy for the installation and
calibration of the WSN. For each of the main events
(sinkholes; debris flows; falls) in all the selected
sites, the monitoring and early warning network was
designed with specific sensors.
On the selected sites, the activity was carried out
in the following steps:
- preliminary geological and geomorphological field
survey on longer railway tracks and surrounding
areas, in order to check the existence of slopes
prone to fast-landslide events;
- selection of shorter railway tracks to be monitored;
- planning of the WSN installation;
- setting of sensor resolution;
- evaluation of alarm thresholds.
The monitoring and early warning system
designed for the sinkhole consisted of two sensors,
detecting any railway deformation with high
accuracy and in real time. The two wireless sensors
covered the same portion of land from different
points of view. This type of installation allows
individual cameras to better define the objects and to
communicate useful information to better identify
the phenomenon on a wider scale. For the
monitoring of rock falls and debris flows, the system
was configured with one or multiple wireless sensors
with multiple points of observation based on both
the “background target” (i.e. the static regular scene)
and the object to be detected. The number of sensors
was also dependent on the monitoring accuracy of
the expected railway deformations, as well as of the
expected abnormal object along the railway track.
For all the investigated phenomena, the definition of
the WSN parameters was fundamental to perceive
and then process only the differences between a step
of the background and the next disturbance, so as to
minimise false alarms and optimise data collection
and transmission. This optimisation procedure
contributes to providing more efficiency to the
management process.
2.2 Materials
This section of the paper presents the design and
development of a sensor prototype based on the
IMTA-52015-5thInternationalWorkshoponImageMining.TheoryandApplications
86
previously defined WSN concept. This prototype
was particularly suited for the investigated scenarios.
In particular, the prototype was a sensor node having
enough computational power to accomplish the
computer vision task envisaged for the railway
monitoring scenarios, as described in the previous
section. In the design of the prototype, an important
requirement was the use of low-cost technologies.
The node uses sensors and electronic components of
low cost so that, once engineered, the device can be
manufactured at low cost in large quantities. In the
design and planning of the architecture, an important
consideration was the ease of installation of the
device: the protective shield used for the sensor
nodes was compact but capable of accommodating
all components of the device. A WSN having its
nodes so engineered was called Smart Camera
Network (SCN).
Going into detail, the single sensor node had a
main board that managed both the vision tasks and
the networking tasks thanks to an integrated wireless
communication module (RF Transceiver).
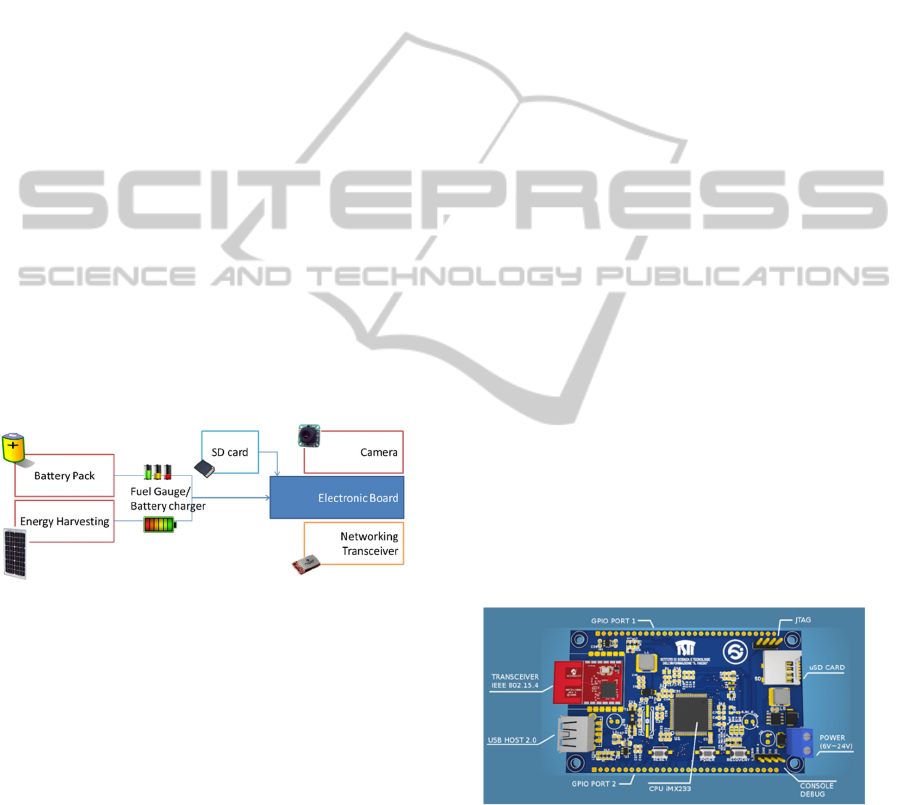
Other components of the sensor node were the
power supply system that controlled charging and
permitted to choose optimal energy-saving policies.
The power supply system included the battery pack
and an optional module for harvesting energy, e.g.
photovoltaic panels (Figure 1).
Figure 1: Architecture of the sensor node.
For building the vision board, an embedded
Linux architecture was selected in the design stage,
so as to provide enough computational power and
ease of programming. A set of ready-made Linux-
based prototyping boards was evaluated in terms of
computing power, flexibility/expandability,
price/performance ratio and technical support. They
were all found to have common disadvantages: high
power consumption and electronic components not
suitable for the tasks of a smart camera node.
It was thus decided to design and build a custom-
made vision component, by designing, printing and
producing a new PCB. The new PCB (see Figure 2)
was conceived to have maximum flexibility of use
while maximising the performance/consumption
ratio. A good compromise was achieved by using a
Freescale CPU based on the ARM architecture, with
support for MMU-like operating systems GNU/
Linux.
This architecture had the advantage of
integrating a Power Management Unit (PMU), in
addition to numerous peripheral interfaces, thus
minimising the complexity of the board. In addition,
the CPU package of type TQFP128 helped us to
minimise the layout complexity, since it was not
necessary to use multilayer PCB technologies for
routing. Thus, the board could be printed also in a
small number of copies. This choice had the further
benefit of reducing development costs: the CPU only
needed an external SDRAM, a 24MHz quartz
oscillator and an inductance for the PMU.
It had an average consumption, measured at the
highest speed (454MHz), of less than 500mW.
The system included an on-board step-down
voltage regulator, type LM2576, featuring high
efficiency to ensure a range of voltages from 6 to
25V, making it ideal for battery-powered systems, in
particular for power supply by lithium batteries (7.2
V packs) and lead acid batteries (6V, 12V, 24V
packs).
The board had several communication interfaces
including an RS232 serial port for communication
with the networking board, SPI, I2C and USB.
For radio communication, a transceiver
compliant with IEEE 802.15.4 was integrated, in
line with modern approaches to the Internet of
Things applications. Appropriate glue was used to
integrate the transceiver into the IPv6 stack, also
containing the 6LoWPAN header compression and
adaptation layer for IEEE 802.15.4 links. Therefore,
the operating system was well capable of supporting
ETSI M2M communications over the SCN.
Figure 2: Design of the PCB and main features.
For integration of a camera sensor into the vision
board, some specific requirements were defined in
the design stage: ease of connection to the board and
of management through it, and minimum
performance under difficult visibility conditions, i.e.
night vision. Thus, the minimal constraints were:
compliance with USB Video Class devices (UVCs)
ExperimentinganEmbedded-sensorNetworkforEarlyWarningofNaturalRisksDuetoFastFailuresalongRailways
87

and possibility to remove the IR filter or capability
of Near-IR data acquisition. Moreover, the selection
of a low-cost device was an implicit requirement
considered for the whole sensor node prototype.
The previously described boards and camera
were housed into an IP66 shield. Another important
component of the node was the power supply and
the energy harvesting system that controlled
charging and permitted to choose optimal energy-
savings policies. The power supply system included
the lead (Pb) acid battery pack and the optional
module for harvesting energy through a photovoltaic
panel.
Figure 3: General setup of the monitoring node.
Figure 3 shows the general setup of a single node
with the electrical connections of the related
components.
2.3 Image Analysis
Sample applications based on computer vision for
monitoring railways via the SCN are described
below. They concern the detection and real-time
alert of dangers strictly related to the flow of trains
on the railway, and are based on a lightweight
computer vision pipeline different from the one used
in standard architectures.
More precisely, the analysis of the railway scene
status and the estimation of the level of service were
usually carried out by collecting data about the
railroad track in terms of events occurring, their type
and extension in space and time. Conventional
pipelines start with i) background subtraction and
move forward to ii) object detection, iii) object
classification, iv) object tracking and v) final data
extraction. On the SCN, instead, it is convenient to
adopt a lightweight approach; in particular,
processed data reside only in the Region of Interest
(RoI), where the presence of an obstructing object
needs to be detected. On the basis of these
detections, then, flow information is derived without
making explicit use of classical tracking algorithms.
More in detail, background subtraction is
performed only on convex quadrangular RoIs. Such
shape is sufficient for modelling physical rectangles
under perspective skew. In this way, when low
vision angles are available, it is possible to manage a
skewed scene even without performing direct image
rectification, which can be computationally intensive
on an embedded sensor. The quadrangular RoI can
be used to model lines on the image (i.e. a 1 pixel
thick line) as well.
On such RoI, lightweight detection methods are
used to classify a pixel as changed (in which case it
is assigned to the foreground) or unchanged (in
which case it is deemed to belong to the
background). Such decision is made by modelling
the background. Several approaches are feasible.
The simplest one is represented by straightforward
frame differencing. Under this approach, the frame
before the one being processed is taken as
background. A pixel is considered to be changed if
the frame difference value is higher than a given
threshold. Frame differencing is one of the fastest
methods but has some limitations; for instance, a
pixel is considered to be changed twice: first, when
an object enters into and, second, when it exits from
the pixel area. In addition, the RoI is placed in an
area of train transit; thus, when an event of transit
occurs, and if the object (i.e. the train occluding the
RoI) is homogeneous and imaged in more than one
frame, it might be not detected in the frames after
the first. Another approach is based on the static
background. Under this approach, the background is
taken as a fixed image without objects, possibly
normalised to factor illumination changes. Due to
weather, shadows and light changes, the background
should be updated to yield meaningful results in
outdoor environments. However, strategies for
background update might be complex; indeed, it
should be guaranteed that the scene is without
objects passing through when updating. To
overcome these issues, algorithms featuring adaptive
backgrounds are used. Indeed this class of
algorithms is the most robust for use in uncontrolled
outdoor scenes. The background is constantly
updated by merging the old background model with
the new observed image. There are several ways of
obtaining adaptation, with different levels of
IMTA-52015-5thInternationalWorkshoponImageMining.TheoryandApplications
88

computational complexity. The simplest is to use an
average image. In this method, the background is
modelled as the average of the frames in a time
window. Online computation of the average is
performed. Then a pixel is considered to be changed
if it exceeds a given threshold of the corresponding
pixel in the average image. The threshold is uniform
on all the pixels. Instead of modelling just the
average, it is possible to include the standard
deviation of pixel intensities, thus using a statistical
model of the background as a single Gaussian
distribution. In this case, both the average and
standard deviation images are computed with an
online method on the basis of the frames already
observed. In this way, instead of using a uniform
threshold on the different image, a constant
threshold is used on the probability that the observed
pixel is a sample drawn from the background
distribution, which is modelled pixel by pixel as a
Gaussian. Gaussian Mixture Models (GMMs) are a
generalisation of the previous method. Instead of
modelling each pixel in the background image as a
Gaussian, a mixture of Gaussians is used. The
number k of Gaussians in the mixture is a fixed
parameter of the algorithm. When one of the
Gaussians has a marginal contribution to the overall
probability density function, it is disregarded and a
new Gaussian is instantiated. GMMs are known to
be capable of modelling changing backgrounds even
in cases where there are phenomena such as
trembling shadows and tree foliage (Stauffer and
Grimson, 1999). Indeed, in those cases, pixels
clearly exhibit a multimodal distribution. However,
GMMs are computationally more intensive than a
single Gaussian. Codebooks (Kim et al., 2004) are
another adaptive background modelling technique
presenting computational advantages for real-time
background modelling with respect to GMMs. In
this method, sample background values at each pixel
are quantified in codebooks, which represent a
compressed form of background model for a long
image sequence. This makes it possible to capture
even complex structural background variations (e.g.
due to shadows and trembling foliage) over a long
period of time under limited memory.
Several ad-hoc procedures can be envisaged
starting with the methods just described. In
particular, one important issue concerns the policy
by which the background is updated or not. In
particular, if a pixel is labelled as foreground in
some frame, we might want this pixel not to
contribute to updating the background or to
contribute thereto to a lesser extent. Similarly, if we
are dealing with a RoI, we might want to fully
update the background only if no change has been
detected in the RoI; if a change has been detected
instead, we may decide not to update any pixel in the
background.
3 RESULTS
This section reports the preliminary results for the
identified case study site, where the experimental
activity was performed in order to monitor the
railway and derive a real-time report of obstacles
endangering train transit. The main objective was to
define the scenarios and set-up for the above-
mentioned three different types of fast-failure events
that might locally involve the railway.
3.1.1 Case Study
The selected pilot site for the first test was located
close to Terni, Central Italy, along a secondary line
of the Italian railway network. The site of Terni is
subject to rock falls and is characterized by a narrow
man-made trench cut in intensely jointed limestones.
From the trench walls, which are partially bounded
by wire mesh, stones of a size from few centimetres
to about one meter may fall onto the railway. In this
site, several tests were carried out for analysing and
verifying the installation's positions and the data
acquisition methods to monitor the railway tracks.
The tests were also aimed at verifying the SCN
suitability for field acquisitions in case of real
running trains as well as in case of artificially caused
rock falls.
Some video sequences were recorded including
the following scenes:
A. sideway scanning of tracks to catch events;
B. semi-perpendicular scanning to catch the rails to
detect any changes;
C. railway scanning without trains, representing the
"background scene";
D. scanning steps with trains in both directions;
E. scanning during vibration generated by train
transit;
F. scanning of simulated anomalous transits as well
as of artificially caused falls of "objects" on the
railway.
It was possible to record and quantify image
artefacts induced by vibrations and air movement.
The collected data enabled to estimate the possible
consequences on the image analysis algorithms and,
therefore, to improve a software solution for
reducing disturbances.
ExperimentinganEmbedded-sensorNetworkforEarlyWarningofNaturalRisksDuetoFastFailuresalongRailways
89
If compared with the static background image, the
recorded noise is very low and can be directly
managed by the acquisition software.
However, the reduction of noise via specifically-
implemented tools should be encouraged in order to
further optimise the performance of the device.
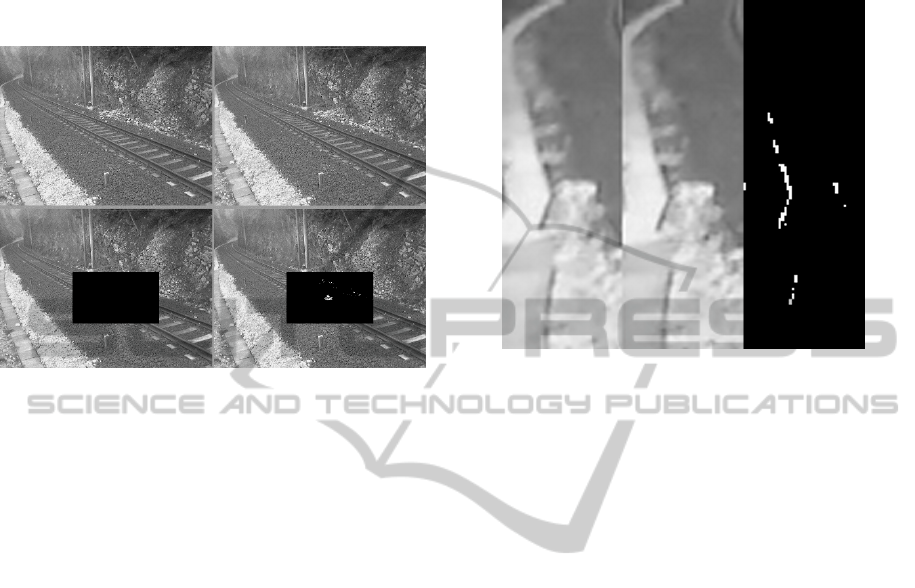
Figure 4: Example of event detected in a RoI over the
tracks (e.g. falling debris).
A final test was performed by recording videos
during train stops along the railway, a type of
disturbance due to the specific event expected to
occur along the railway track. This final test
demonstrated the excellent performance of the
implemented algorithms: once the directional
parameters referred to the monitored scene have
been defined, the software only processes the
camera records that express differences between the
background scenario and the changed one,
minimizing false alarms and optimising data
collection and transmission.
More in detail, scenarios were defined for
training and testing the implemented algorithm to be
robust and satisfy the specific requirements defined
for the case study application. In particular, the
robustness of the image analysis algorithm was
tested under scenarios such as the management of
false alarms due to train transit, coherence in case of
vibrations caused by train transit, adequacy of
detection of debris passing by the rails but not
impeding subsequent train transit, capability of
detecting early signs of sinkholes.
In Figure 4, an example of a detected event
(falling debris) is shown (right), in comparison with
the normal situation (left). The amount of the
detected change in the scene is above the threshold
fixed as definition of an endangering situation.
Moreover, Figure 5 shows the amount of
maximum displacement (in pixels) during the transit
of a train causing vibration to the installation; such
amount was quantified to be less than 1% with
respect to the image size, thus a very limited and
manageable difference.
Figure 5: Details (zoom 400%) of the maximum
displacement between two frames during vibration due to
train transit.
With regard to the capability of detecting early
signs of sinkholes, a different scenario was set up
with the SCN device placed perpendicularly over the
train tracks. With this set-up, it was possible to
define the limit of distance from the railway and the
limit of movement in the parallelism of the rails. The
set-up is shown in Figure 6, with a highlighted area
indicating the distance representing the limit of the
detection capability of the sensor (i.e. around 150
pixel size) for determining discrepancies in the
parallelism of the rails.
4 CONCLUSIONS
In order to monitor railway tracks in real time and
detect fast failures occurring and threatening train
transit, a Smart Camera Network was put in place.
Three different types of fast-failure events, involving
the railway, were identified with the goal of
developing algorithms capable of spotting and
localising them. Furthermore, scenarios were
defined to experiment, in the case study site, the
capability of the SCN to successfully monitor the
various events. While the simulation of some events
was feasible (e.g. debris falling onto the railway),
the simulation of other events was not feasible due
to risks for safety (e.g. early signs of the sinkhole).
Therefore, the latter events were only simulated
IMTA-52015-5thInternationalWorkshoponImageMining.TheoryandApplications
90

through software changes, but the results were good
and promising in both cases.
Figure 6: Sinkhole detection set-up highlighting the
detection area.
ACKNOWLEDGEMENTS
The authors are grateful to Eng. Giovanni Costa and
Eng. Paola Firmi for allowing the dissemination of
some monitoring data applied in some experimental
tracks of the Italian Rail Network in the frame of the
Agreement between CERI-Sapienza and Italian Rail
Network.
REFERENCES
Amitrano, D., Grasso, J.R. and Senfaute, G.: Seismic
precursory patterns before a cliff collapse and critical
point phenomena. Geophysical Research Letters, 32,
L08314, doi:10.1029/2004GL022270, 2005.
Antonello G, Casagli N, Farina P, Leva D, Nico G, Siebar
AJ, Tarchi D (2004) Ground-based SAR
interferometry for monitoring mass movements.
Landslides 1:21-28.
Bigarré, P., Klein, E, Gueniffey, Y., and Verdel, T.: Cloud
monitoring: an innovative approach for the prevention
of landslide hazards. The Second World Landslide
Forum Rome, 2011. Abstracts Book WLF2, L16, 475
(free download from the web-site:
www.wlf2.org/home/proceedings/WLF2_Abstract_Bo
ok_2011.pdf), 2011.
Gaffet, S., Guglielmi, Y., Cappa, F., Pambrun, C.,
Monfret, T. and Amitrano, D.: Use of the
simultaneous seismic, GPS and meteorological
monitoring for the characterization of a large unstable
mountain slope in the southern French Alps. Geophys.
J. Int., 182, 1395–1410, 2010.
Kim K., Chalidabhongse T., Harwood D. and Davis L.,
2004. Background modeling and subtraction by
codebook construction, IEEE International Conference
on Image Processing (ICIP), 2004, pp. 2-5.
Lai, X.P., Cai, M.F. and Xie, M.W.: In situ monitoring and
analysis of rock mass behavior prior to collapse of the
main transport roadway in Linglong Gold Mine,
China. International Journal of Rock Mechanics &
Mining Sciences 43, 640–646, 2006.
Lenti, L., Martino, S., Paciello, A., Prestininzi, A. and
Rivellino S.: Microseismicity within a karstified rock
mass due to cracks and collapses triggered by
earthquakes and gravitational deformations. Natural
Hazards, 64, 359–379, 2012.
Martino S., Mazzanti P (2014) Integrating geomechanical
surveys and remote sensing for sea cliff slope stability
analysis: the Mt. Pucci case study (Italy) Nat. Hazards
Earth Syst. Sci., 14, 831–848.
Stauffer C. and Grimson W.E., 1999. Adaptive
background mixture models for real-time tracking,
Proceedings of the Conference on Computer Vision
and Pattern Recognition, Fort Collins, CO, USA:
1999, pp. 2: 246-252.
ExperimentinganEmbedded-sensorNetworkforEarlyWarningofNaturalRisksDuetoFastFailuresalongRailways
91
