
An Intelligent Framework and Prototype for Autonomous
Maintenance Planning in the Rail Industry
C. J. Turner
1
, A. Tiwari
1
, A. Starr
1
, I. Durazo-Cardenas
1
and K. Blacktop
2
1
Manufacturing and Materials Department, Cranfield University, Bedford, U.K.
2
Network Rail, Milton Keynes, U.K.
Keywords: Rail Industry, Computational Intelligence, Data Mining, Data Fusion, Autonomous Operation, Planning.
Abstract: This paper details the development of the AUTONOM project, a project that aims to provide an enterprise
system tailored to the planning needs of the rail industry. AUTONOM extends research in novel sensing,
scheduling, and decision-making strategies customised for the automated planning of maintenance activities
within the rail industry. This paper sets out a framework and software prototype and details the current
progress of the project. In the continuation of the AUTONOM project it is anticipated that the combination
of techniques brought together in this work will be capable of addressing a wider range of problem types,
offered by Network rail and organisations in different industries.
1 INTRODUCTION
Recent developments in both Computational
Intelligence and web based information systems
have made possible a new era of interconnected
decision support platforms capable of autonomous
operation. The AUTONOM project provides such an
enterprise system tailored to the planning needs of
the rail industry. AUTONOM aims to extend
research in novel sensing, scheduling, and decision-
making strategies customised for the automated
planning of maintenance activities within the rail
industry. The case study for this work is UK rail
infrastructure provider Network Rail (Network Rail
is the organisation that is responsible for maintaining
and developing the UK rail infrastructure including
signalling, bridges, tunnels, level crossings, viaducts
and 17 key stations within the country).
Maintenance of widely-dispersed assets is expensive
because it involves widespread inspection, checking
and measurement. The integration of sensor-based
information in geographically dispersed and less
structured environments poses challenges in
technology and cost justification. Academic
challenges include improvement of embedded
sensing, reliable estimation of monitoring
parameters, a unified approach to the mathematics
and data structures, and a rigorous approach to cost
estimation and benefit analysis. The industrial
drivers include standardisation, automation,
connectivity, and reduction of unit cost (Starr et al.
2013). The overall aim is to enable improved
integration between architectural levels in data-rich
environments in automated, intelligent maintenance,
responding to business pull and demonstrating value.
A prototype is currently being developed by the
authors that will deliver this vision as a web enabled
platform capable of delivering automated decision
capability to managers involved in rail maintenance
planning activities.
2 RELEVANT RESEARCH
On embarking on such a project it was necessary to
investigate current approaches to planning and cases
of autonomous operation in the rail industry. In
addition to literature a think tank group was
convened to examine areas of railway operation that
would benefit from automation. The think tank
group was made up of senior representatives of
Network Rail and other corporate partners of the
wider AUTONOM project. The four areas shown in
Figure 1 were highlighted by this group as having
potential for automation and are considered as
priority areas by Network Rail and the authors.
83
Turner C., Tiwari A., Starr A., Durazo-Cardenas I. and Blacktop K..
An Intelligent Framework and Prototype for Autonomous Maintenance Planning in the Rail Industry.
DOI: 10.5220/0005462800830089
In Proceedings of the 1st International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS-2015), pages 83-89
ISBN: 978-989-758-109-0
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
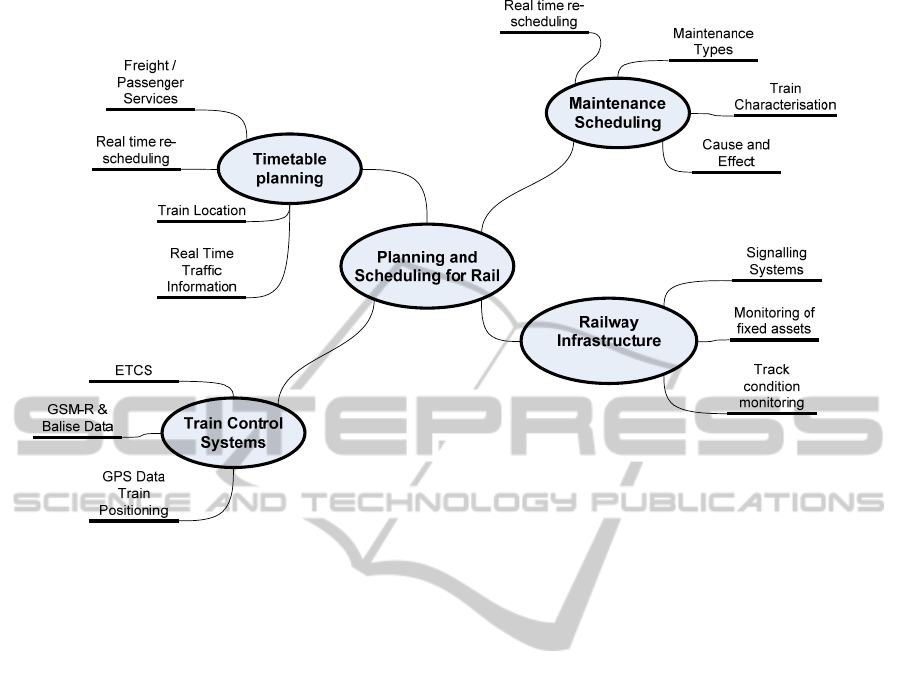
Figure 1: Planning and scheduling activities relevant to the rail industry.
2.1 Maintenance in the Rail Industry
As mentioned by Dadashi et al. (2011) there has
been a move from reactive to diagnostic and
prognostic modes of railway maintenance; where
fault diagnosis and prediction are key. As part of this
movement work has been conducted into the area of
fault states and the interdependencies between the
states in Schöbel and Maly (2012). This paper makes
clear the need for active monitoring of rail vehicles
so logical connections between fault states can be
made. In the work of Dadashi et al. (2012) data
from assets deployed in the field can increasingly be
made available to mobile devices. Bye (2013) details
the use of mobile devices and the design of
application interfaces with case studies drawn from
Network Rail. The subject of risk centred
maintenance is investigated by Selvik and Aven
(2011). These authors make the point that Reliability
Centred Maintenance (RCM) for preventative
maintenance practice is well understood in industry
though it does present limitations when used to
quantify risk and uncertainty in projects. The
importance of organisational design in railway
maintenance operations is highlighted by Jiang et al.
(2012) Maintenance operations may be performed
by a collection of co-operating organisations, having
a model of how such organisations operate together
is in the opinion of Jiang et al. (2012) essential.
2.2 Planning in the Rail Industry
Timetable planning is an active area of research for
the rail industry. The work of Yang et al. (2010)
investigates the development of incomplete cyclic
timetables for trains. Real time re-scheduling of
trains is the subject of Wegele et al. (2010), where
genetic algorithms are used to perform a heuristic re-
ordering of trains when delays are encountered in
the rail network. The mark‐up language RailML is
also mentioned in this work. RailML is an XML
based metadata language that defines a set of
common rail specific terminology as meta-
descriptions (RailML is detailed in Nash et al.
(2004)). The timetabling problem is framed by Ho et
al. (2012), as one of multi objective‐optimisation in
that a feasible solution must be identified within a
limited time constraint that satisfies a number of
objectives. Scheduling of trains in terms of energy
efficiency goals is another active area of interest and
one such approach is described in the work of Hu et
al. (2013). This approach utilises a combination of a
standard multi‐objective optimisation algorithm and
a fuzzy multi‐objective optimisation approach to
find train allocations and movements that balance
fuel efficiency with passenger travel time. In Peng et
al. (2013) the optimal routing and scheduling of
periodic inspections in a rail network are explored in
VEHITS2015-InternationalConferenceonVehicleTechnologyandIntelligentTransportSystems
84

the context of long term planning. A heuristic
algorithm is put forward as part of this research that
utilises a local search method allowing for the
scheduling problem to be divided into sub sets, as in
similar work by Peng et al. (2012). Improved results
are found over existing manual techniques although
this approach is only able to add new tasks at the end
of the schedule rather than within the schedule.
2.3 Sensor Fusion
One of the major developments in train control
systems in recent years has been the European Rail
Traffic Management System (ERTMS). The
ERTMS system is composed of two main entities,
the European Train Control System (ETCS) and
Global System for Mobile Communications-Railway
(GSM-R) (Abed, 2010). ETCS is comprised of two
main components, the Automatic Train Protection
System (ATP) (automated emergency braking at red
signals) and signalling system (in cab signalling).
GSM-R is an international standard for mobile voice
and data communication transmission in a railway
environment and primarily used for train to control
centre communication. The different levels of
ERTMS are detailed in Abed (2010). Beyond the
area of train control systems, such as ETCS, much
research has been carried out in the area of
signalling and its analysis for safety related
purposes. The work of Filip et al. (2010) examines
the use of Global Navigation Satellite Systems
(GNNS) in relation to railway safety applications. In
this study the authors examine the applicability of
existing GNSS technologies and their modes for use
in the railway industry, highlighting their current
limitations. As Filip et al. (2008) mentions satellite
technology will have a significant impact on the
railways in that the trackside sensor equipment (such
as Balaises and hot box sensors) will be superseded
by asset located sensors that determine the actual
real time position of moving assets (Rail vehicles)
via satellite. In terms of railway signalling, research
has been conducted involving areas such as satellite
technology (Filip et al., 2008, 2010) though there
has also been an investigation into the use of Internet
Protocol for the control of signals reducing the need
for the installation of traditional copper wiring
(Endo, et al., 2008).
2.4 Autonomous Systems
Autonomous systems may range from
semi‐automated to totally autonomous (without
human intervention) operation. Semi‐automated
operation includes ETCS in‐cab signalling and
automated train braking systems. Fully automated
operation examples include the automated operation
of trains. Autonomous systems can contain complex
control logic often incorporating computational
intelligence techniques such as fuzzy logic, genetic
algorithms and autonomous agents. Agents are said
to embody two principles: an ability to act
autonomously and the capability to interact with
other agents (Wooldridge, 2008). Multi-agent
systems are then, by definition, interacting
collections of agents (Wooldridge, 2008). The
subject of autonomous real‐time planning has been
investigated by Cresswell et al. (2013) in their work
on the LOCM (Learning Object‐Centred Models)
system. Automated planning has also been
investigated by Fernandez et al. (2013) who propose
an architecture for the automation of data mining
tasks. Again the PDDL (Planning Domain
Definition) language features heavily in this
approach. These papers, while not currently applied
to rail uses, do hold some potential for further
investigation with regards to autonomous rail
research. There are only limited investigations into
fully autonomous systems usually concentrating on
the automatic operation of metro/light rail systems
as in Dominguez et al. 2010) and Wackrow and
Slamen (2013). Of interest in the enablement of
autonomous operation is the use of ontology. An
example of the use of ontologies in the management
of rail systems is provided by Briola et al. (2013)
who present a semantic architecture for the
centralised control of railway traffic. One of the
main advantages of this system is the ability for a
user to make natural language queries on the data
being collected. Two key objectives of this approach
are to reduce the overall cost of managing the rail
system through autonomous or semi‐autonomous
operation and the ability to make real time changes
to train movements and their scheduling when
encountering problems that may lead to service
disruption such as faulty trains and damage within
the infrastructure (Briola et al., 2013).
Opportunities exist to review maintenance planning
and scheduling, among other activities, with a view
to autonomous or semi‐autonomous operation.
AnIntelligentFrameworkandPrototypeforAutonomousMaintenancePlanningintheRailIndustry
85
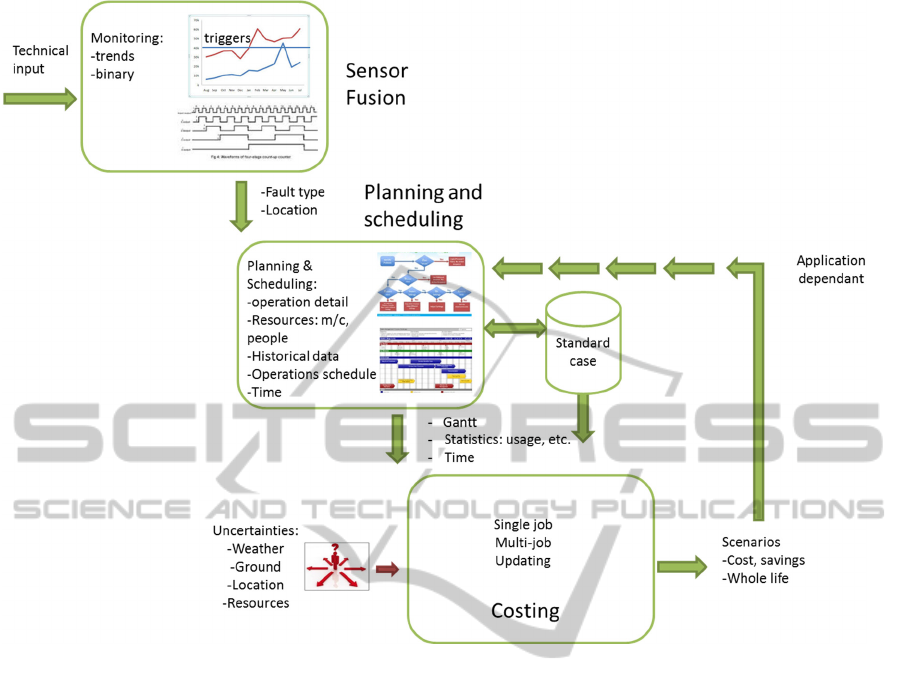
Figure 2: AUTONOM Framework Illustration.
3 FRAMEWORK AND
PROTOTYPE
In the development of the framework and prototype
it was decided that the area of planning and
scheduling for rail maintenance should be addressed
by the AUTONOM project. As a first stage the
framework shown in Figure 2 was developed,
outlining the major units of research that are
required to address maintenance planning activities.
3.1 AUTONOM Framework
In Figure 2 it can be seen that there are three key
areas of research that comprise AUTONOM, sensor
fusion, planning and scheduling and costing. Sensor
fusion involves the processing and analysis of raw
data provided by sensors located on assets; in the
case study (detailed later in the paper) this data will
be supplied by Network Rail. The data received will
describe the degradation state of the tracks and faults
found along the line. From this data it will be
possible to look for trends and identify triggers for
when track repairs become necessary and the
urgency of the repair. On identifying when a repair
has become urgent sensor fusion will raise an alert.
The planning and scheduling area will provide a
Gantt chart of all scheduled maintenance activities
for certain aspects of track maintenance. It will be
possible to schedule or reschedule a maintenance job
depending on the urgency of the work and the
resources available. An important component of
scheduling is of course cost. The area of costing will
also be examined by AUTONOM. It will be possible
to cost a repair in the context of it being a single
(one-off) job or in combination with other
maintenance activities. It will also be possible to
build in costing for uncertain elements such as the
effect of the weather, ground conditions and
resources available at the site of the repair and the
time window when the repair will take place. When
undertaking repairs on the rail system the time
window available is often limited by the amount of
possession time available to Network Rail (that is
the amount of time when access to the track by rail
VEHITS2015-InternationalConferenceonVehicleTechnologyandIntelligentTransportSystems
86

vehicles can be denied for safe completion of
maintenance activities). In some cases such as when
repairs can be made by track grinding machines it
may be possible to complete a maintenance activity
outside of track possession time. Within the
framework outlined it will be possible to pass data
between areas such as the feedback loop between
costing and planning and scheduling.
3.2 AUTONOM Prototype
Figure 3 shows a schematic of the prototype that is
currently being developed as part of AUTONOM. In
this prototype it can be seen that the three areas
illustrated in the framework (shown in Figure 2)
have now become components In addition a fourth
component has been added, the integration
component. This component will coordinate the data
being passed between the other three components
and act as a portal for the user interfaces presented
by each component. This application will make full
use of networked data (shown as 1 in Figure 3) as
many live (or near live) streams are available. Where
live data is not available as a stream data files will
be made available on Network Rail servers (updated
on a regular hourly/daily basis). As mentioned in the
framework description the sensor fusion component
(2 in Figure 3) will utilise a combination of data
mining techniques and statistical approaches to
identify when urgent track maintenance is necessary
and raise an alert to the integration component (3 in
Figure 3). The integration component sends the alert
to the planning and scheduling component (4 in
Figure 3) for the scheduling of the maintenance that
is necessary for the repair required. A further loop
through integration allows for the repair to be valued
by the costing component (6 in Figure 3). Once a
costing is available it will be possible for the
planning and scheduling component to produce an
optimised scheduling for the repair. As the data
made available by each component will accessible to
the prototype as a whole it will be possible for the
planning and scheduling component to produce a
range of scheduling scenarios each, perhaps, with
different time and cost implications.
It would then be for the user to either select the
scenario (through the interface provided by the
integration component) or set rules on how scenarios
should be chosen to allow for fully automated
scheduling to occur. The optimisation approach will
build on existing heuristics for track repairs in
combination with the use of a multiple objective
optimisation approach such as genetic algorithm
(where a population of schedules may be developed
and optimised for trade-off between cost and time).
In the development of the prototype it is envisaged
that the application should be web accessible. The
application will be built on a Microsoft platform
Figure 3: Schematic diagram of the AUTONOM Prototype.
AnIntelligentFrameworkandPrototypeforAutonomousMaintenancePlanningintheRailIndustry
87

utilising the C# programming language and the
integration component will provide a web based
interface. The use of web technologies also raises
the possibility of utilising the application at trackside
for scenarios when work has to be rescheduled at
short notice due to unforeseen circumstances (such
as a change in weather/ground conditions and
overruns in time taken to complete the repair). In
this case the work of Bye (2013) will be
instrumental as the interfaces provided to Network
Rail mobile devices could be utilised in the display
of the AUTONOM prototype. In terms of data
exchange it is likely that many streams (and data
files) provided by Network Rail will be in a
proprietary format. This will necessitate the data
fusion component to provide a transformation of this
data into an XML format. In this task the RailML
format (Nash et al., 2004) may be informative in
constructing a suitable XML representation.
4 CASE STUDY
As a practical demonstration of the approach
outlined in this paper the illustrated prototype
(Figure 3) is currently under development with the
UK infrastructure provider Network Rail providing a
case study for its practical use. In terms of the
maintenance activities to be analysed by
AUTONOM it is likely that there will be a
concentration on track repair activities performed by
rail grinding and tamping vehicles. The practice of
rail grinding is used into to address defects such
cracks in the rail head (the part of the rail in contact
with train wheels). In practice the top layers of metal
of the track head (containing the crack) are ground
away to the depth of the crack. Rail grinding
machines are normally deployed as rail vehicles that
can perform the grinding operation while in motion
along the length of track affected by rail head
cracks. The practice of tamping is different from
grinding in that it addresses problems in track
subsidence by lifting the track and squeezing the
ballast underneath to raise the height of the track. As
with grinding tamping machines normally take the
form of a rail vehicle that can move up and down the
affected length of track. As tamping can over time
damage the ballast underneath the track (crushing it
into a finer grain) the practice can be combined with
stone blowing where new stones can be inserted
below a section of track.
Both tamping and grinding rail vehicles contain a
range of sensors and are capable of producing data
on the state of the track and the repairs being carried
out. In addition Network Rail utilise a number of
track inspection trains that they use to monitor track
condition throughout the UK rail network. Such
inspection trains also produce track condition data in
volume.
As the AUTONOM project progresses use will be
made of these data sources in order to develop, test
and eventually validate the software prototype.
5 CONCLUSIONS
This paper has set out the current position and stage
of development of the AUTONOM project; a project
that aims to provide an enterprise system tailored to
the maintenance needs of the rail industry, with an
initial focus on that area of rail maintenance
planning. The software prototype resulting from this
project will take advantage of the recent
developments in computational intelligence and the
availability of networked data stores and feeds made
available by the case study organisation UK rail
infrastructure provider Network Rail to provide a
web based enterprise solution for maintenance
activities.
In the continuation of the AUTONOM project it is
anticipated that the combination of techniques
brought together in this work will be capable of
addressing a wider range of problem types, offered
by Network Rail and organisations in different
industries.
ACKNOWLEDGEMENTS
This research has been funded by the UK
Engineering and Physical Sciences Research
Council (EPSRC) and UK rail infrastructure
provider Network Rail.
REFERENCES
Abed, S.K., 2010. European rail traffic management
system - An overview. In: 1st International
Conference on Energy, Power and Control (EPC-IQ),
Basra, Iraq, 173-180.
Briola D, Caccia R, Bozzano M and Locoro A., 2013.
Ontologica: Exploiting ontologies and natural
language for railway management. International
Journal of Knowledge-Based and Intelligent
Engineering Systems, 17, 3-15.
Bye R., 2013. Designing Mobile User Experiences:
Disruptive Innovation in Railway Asset Information.
VEHITS2015-InternationalConferenceonVehicleTechnologyandIntelligentTransportSystems
88

In: Dadashi N. et al. (eds) Rail Human Factors:
Supporting Reliability, Safety and Cost Reduction,
Leiden, CRC Press, 453.
Cresswell SN, McCluskey TL and West MM., 2013.
Acquiring planning domain models using LOCM.
Knowledge Engineering Review, 28, 195-213.
Dadashi N, Wilson JR, Sharples S, Golightly D and
Clarke, T., 2011. A framework of data processing for
decision making in railway intelligent infrastructure,
2011 IEEE International Multi-Disciplinary
Conference on Cognitive Methods in Situation
Awareness and Decision Support (CogSIMA 2011),
Miami Beach, Florida, 276-283.
Dadashi Y, Sharples S, Wilson J and Clarke T., 2012.
Investigating presentation of rail-specific spatial
information on handheld computer screens. Personal
and Ubiquitous Computing, 16, 1051-1064.
Dominguez M, Fernandez A, Cucala AP and Blanquer J.,
2010. Efficient Design of Automatic Train Operation
Speed Profiles with On Board Energy Storage
Devices. In: Ning B et al. (eds) Computers in Railways
XII: Computer System Design and Operation in the
Railway and Other Transit Systems. Southampton,
WIT Press, 509 – 520.
Endo M, Okada T, Watanabe D, Aimi K, Kunifuji T and
Matsumoto M., 2008. A safety-related transmission
method for a new railway signalling system based on
an IP-Network. In: Allan J et al. (eds) Computers in
Railways XI: WIT Transactions on the Built
Environment, Southampton, WIT Press, 113.
Fernández S, De La Rosa T, Fernández F, Suárez R, Ortiz
J, Borrajo D and Manzano D., 2013. Using automated
planning for improving data mining processes.
Knowledge Engineering Review, 28, 157-173.
Filip A, Bažant L and Mocek H., 2010. The experimental
evaluation of the EGNOS safety-of-life services for
railway signalling, In: Ning B et al. (eds) Computers
in Railways XII: Computer System Design and
Operation in the Railway and Other Transit System,
Southampton, WIT Press, 735.
Filip A, Beugin J, Marais J and Mocek H., 2008. Safety
concept of railway signalling based on Galileo Safety-
of-Life Service. In: Allan J et al. (eds) Computers in
Railways XI: WIT Transactions on the Built
Environment, Southampton, WIT Press, 103-112.
Nash A, Huerlimann D, Schuette J and Krauss VP., 2004.
RailML-a standard data interface for railroad
applications. In: Allan J et al. (eds) Computers in
Railways IX, WIT Transactions on the Built
Environment, Southampton, WIT Press, 233-240.
Peng, F, Ouyang, Y., and Somani, K., 2013. Optimal
routing and scheduling of periodic inspections in
large-scale railroad networks, Journal of Rail
Transport Planning and Management, 163-171.
Peng, F, Ouyang, Y., 2012. Track maintenance production
team scheduling in railroad networks, Transport Res
B-Meth, 46, 1474–1488.
Ho TK, Tsang CW, Ip KH and Kwan KS., 2012. Train
service timetabling in railway open markets by particle
swarm optimisation. Expert Syst Appl, 39, 861-868.
Hu H, Li K, and Xu X. (2013). A multi-objective train-
scheduling optimization model considering
locomotive assignment and segment emission
constraints for energy saving, Journal of Modern
Transportation, 21, 9-16.
Jiang J, Huisman B and Dignum V., 2012. Agent-based
multi-organizational interaction design: A case study
of the Dutch railway system, Proceedings - 2012
IEEE/WIC/ACM International Conference on
Intelligent Agent Technology (IAT 2012), Macau,
China, 196-203.
Schöbel A and Maly T., 2012. Operational fault states in
railways. European Transport Research Review, 4,
107-113.
Selvik JT and Aven T., 2011. A framework for reliability
and risk centered maintenance. Reliability Engineering
and System Safety, 96, 324-331.
Starr A, Baguley P, Xu, Y Tsourdos A, Shehab, E, and
Tiwari, A. 2013 AUTONOM: Integrated through-life
support for high-value systems: Details of Grant,
http://gow.epsrc.ac.uk/NGBOViewGrant.aspx?GrantR
ef=EP/J011630/1, Visited on 17/03/15.
Wackrow J and Slamen A., 2013. The implications of
automation on human intervention at London
underground, Rail Human Factors: Supporting
Reliability. Safety and Cost Reduction, 209.
Wegele S, Corman F and D’Ariano A., 2010. Comparing
the effectiveness of two real-time train rescheduling
systems in the case of perturbed traffic conditions. In:
Hanson I (ed) Timetable Planning and Information
Quality, Southampton, WIT Press, 189.
Wooldridge M., 2008. An introduction to multiagent
systems, Wiley, Chichester.
Yang D, Nie L, Tan Y, He Z and Zhang Y., 2010.
Working out an incomplete cyclic train timetable for
high-speed railways by computer. In: Ning B et al.
(eds) Computers in Railways XII, WIT Transactions
on the Built Environment, Southampton, WIT Press,
889.
AnIntelligentFrameworkandPrototypeforAutonomousMaintenancePlanningintheRailIndustry
89
