
A Case Study for Evaluating Bidirectional Transformations in QVT
Relations
Bernhard Westfechtel
Applied Computer Science I, University of Bayreuth, D-95440 Bayreuth, Germany
Keywords:
Model-driven Software Engineering, Bidirectional Model Transformations, QVT Relational.
Abstract:
In model-driven software engineering, high-level models of a software system are eventually transformed into
executable code. Model transformations constitute a key technology for model-driven software engineering.
QVT Relations (QVT-R) is a language for the declarative specification of model transformations which was
defined in an OMG (Object Management Group) standard. In addition to unidirectional transformations, QVT-
R supports bidirectional transformations: Rather than writing two unidirectional transformations separately,
the user may provide a single relational specification which may be executed in both directions. In this way,
the specification of a bidirectional transformation may be simplified considerably — which is crucial e.g. for
round-trip engineering. This paper investigates a case study for evaluating QVT-R’s capabilities for specifying
bidirectional transformations. Even in this rather simple case study, development of a bidirectional transfor-
mation turns out to be more complex than expected. Motivated by the case study, we propose extensions to
QVT-R which facilitate the specification of bidirectional transformations considerably.
1 INTRODUCTION
In model-driven software engineering (Schmidt,
2006), software development is driven by the con-
struction of high-level models which are transformed
over multiple stages into executable code. For model-
driven software engineering, key enabling technolo-
gies are required for defining modeling languages as
well as defining and executing model transformations.
In object-oriented modeling, the abstract syntax
of a modeling language is defined by a metamodel
(a structural class model). To this end, the Object
Management Group (OMG) provides the Meta Object
Facility standard (MOF (Object Management Group,
2013)), whose subset EMOF (Essential MOF) has
been implemented in the Eclipse Modeling Frame-
work (EMF) (Steinberg et al., 2009). (E)MOF is used
widely for metamodeling.
In contrast, a wide variety of languages and
tools for model transformations has been devel-
oped (Jakumeit et al., 2014). Model transforma-
tion languages are based on different computational
paradigms (procedural, functional, rule-based, object-
oriented), application and scheduling strategies, di-
rectionality (unidirectional vs. bidirectional), support
for in-place or out-place, batch or incremental trans-
formations, etc. (Czarnecki and Helsen, 2006).
In the light of this diversity, the OMG issued the
QVT standard (Queries, Views, and Transformations),
which defines a family of model transformation lan-
guages at different levels of abstraction (Object Man-
agement Group, 2014). The most high-level language
is QVT Relations (QVT-R), which supports the declar-
ative specification of transformations between MOF-
based models. Furthermore, QVT-R reuses the Object
Constraint Language (OCL), an expression language
for MOF models (Object Management Group, 2012).
QVT-R addresses a wide spectrum of model transfor-
mation scenarios, including enforcing and checking,
unidirectional and bidirectional, batch and incremen-
tal, and n:1 transformations.
While QVT-R provides many interesting and
promising features, the language has not been adopted
widely. This stands in sharp contrast to OMG stan-
dards for defining modeling languages such as MOF
and OCL. Thus, on the one hand, model transforma-
tions constitute a key enabling technology for model-
driven software engineering. On the other hand, the
QVT-R language, which is promoted as an OMG
standard, has not gained significant acceptance so far.
These observations motivated our research into
the evaluation of the QVT-R language. In particular,
we investigate the following features of QVT-R: (1)
expressiveness (what kinds of transformation prob-
141
Westfechtel B..
A Case Study for Evaluating Bidirectional Transformations in QVT Relations.
DOI: 10.5220/0005466801410155
In Proceedings of the 10th International Conference on Evaluation of Novel Approaches to Software Engineering (ENASE-2015), pages 141-155
ISBN: 978-989-758-100-7
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

lems may be solved?), (2) conciseness (may transfor-
mations be written concisely, at a high level of ab-
straction?), (3) readability (how easy is it to under-
stand a transformation written in QVT-R?), and (4)
semantic soundness (are the semantics of transforma-
tions defined clearly and in a unique way?).
This paper focuses on a particularly interesting
feature of QVT-R: the declarative specification of
bidirectional transformations. Rather than writing
two unidirectional transformations separately, a trans-
formation developer may provide a single relational
specification which may be executed in both direc-
tions. This approach does not only save specification
effort. In addition, it ensures the consistency of for-
ward and backward transformations.
Bidirectional transformations are required in a va-
riety of use cases of industrial relevance. For exam-
ple, round-trip engineering integrates forward and re-
verse engineering into a coherent process which needs
to be supported by bidirectional transformation tools.
Furthermore, integration of heterogeneous tools calls
for data converters which ideally perform lossless
transformations in all directions.
The property of bidirectionality merely states that
a given transformation definition may be executed in
both directions. In addition, it is highly desirable that
forward and backward transformations behave consis-
tently. The strongest form of mutual consistency is
mutual invertibility: By transforming back and forth
in either direction, the original model is always re-
produced. Unfortunately, mutual invertibility may
not be achievable in the case of heterogeneous meta-
models due to loss of information. Even then, how-
ever, bidirectional transformations with weaker con-
sistency properties may still be achievable.
In this paper, we evaluate QVT-R’s support for
bidirectional transformations through a case study
from the domain of project management (Kerzner,
1998). The case study deals with transformations be-
tween different kinds of activity networks for project
planning: While Gantt diagrams are composed of
activities related by dependencies of different types
(end-start, start-start, etc.), CPM networks consist of
events which are connected by activities. Their under-
lying metamodels are similar, yet heterogeneous. Any
Gantt diagram may be transformed into an equivalent
CPM network. The corresponding backward transfor-
mation may reconstruct the original Gantt diagram,
but it works only for those kinds of CPM networks
which may be generated by the forward transforma-
tion. This restriction is inherent to the transformation
problem at hand and applies no matter which trans-
formation language is used. Full mutual invertibility
cannot be achieved here. The backward transforma-
tion inverts the forward transformation, but this state-
ment does not always hold for the opposite direction:
If the backward transformation is applied to some “in-
appropriate” CPM network, the forward transforma-
tion may not reconstruct the original network.
The case study is small enough to be presented in
a single, self-contained paper. Though being small, it
does provide some important insights into potentials
and limitations of QVT-R with respect to the specifica-
tion of bidirectional transformations. While we suc-
ceeded in solving the transformation problem at hand
with a concise specification, development of the bidi-
rectional transformation turned out to be more com-
plex than expected. In particular, the QVT-R user has
to consider the execution semantics of QVT-R in de-
tail to ensure that the transformation is actually exe-
cutable in both directions. Furthermore, the resulting
specification is hard to read and understand. Finally,
the case study reveals several issues concerning the
definition of the dynamic semantics.
Motivated by the case study, we propose exten-
sions to QVT-R which facilitate the specification of
bidirectional transformations considerably. These ex-
tensions make specifications of bidirectional transfor-
mations easier to construct and understand. Further-
more, they remove some problems regarding the se-
mantics definition of QVT-R. The proposed exten-
sions may contribute to a wider adoption of QVT-R.
The rest of this paper is structured as follows: Sec-
tion 2 introduces basic notions from the domain of
model transformations. Section 3 briefly describes
QVT-R. Section 4, the core part of this paper, presents
the case study, including an evaluation and a proposal
for revising QVT-R. Section 5 compares related work.
Section 6 concludes the paper by summarizing and
discussing our findings.
2 MODEL TRANSFORMATIONS
A model is an abstraction of a system allowing pre-
dictions or inferences to be made (K
¨
uhne, 2006). A
model is expressed in a modeling language. A meta-
model defines the abstract syntax of a modeling lan-
guage, usually with the help of class diagrams and
additional constraints (written e.g. in OCL). A model
obeying the rules defined in a metamodel is called an
instance of that metamodel.
A model transformation operates on a set of mod-
els, each of which may be either read, created, or up-
dated. A single-source-single-target transformation
takes a single source model as input and produces a
single target model as output. A transformation is
called exogenous (endogenous) if the source and tar-
ENASE2015-10thInternationalConferenceonEvaluationofNovelSoftwareApproachestoSoftwareEngineering
142
get metamodels are different (the same). The case
study presented in this paper deals with an exogenous
single-source-single-target transformation.
A transformation may be modeled as a function
from a source model to a target model. A transfor-
mation is total if it may be applied to any instance
of the source metamodel, deterministic if it returns a
unique target model for a given source model, injec-
tive if it returns different target models for different
source models, surjective if it can generate any in-
stance of the target metamodel, and bijective if it is
both injective and surjective.
As defined so far, a transformation is unidirec-
tional: It can generate an instance of the target meta-
model from an instance of the source metamodel, but
not vice versa. A bidirectional transformation is a
pair of opposite unidirectional transformations (called
forward and backward transformation).
In the context of round-trip engineering and bidi-
rectional data converters, it is highly desirable that
both forward and backward transformation are total
and mutually inverse. Totality ensures that the trans-
formations may be applied to all instances of the re-
spective metamodels. Mutual inversion ensures con-
sistent behavior: Applying the backward transforma-
tion after the forward transformation returns the orig-
inal model; likewise for the opposite direction.
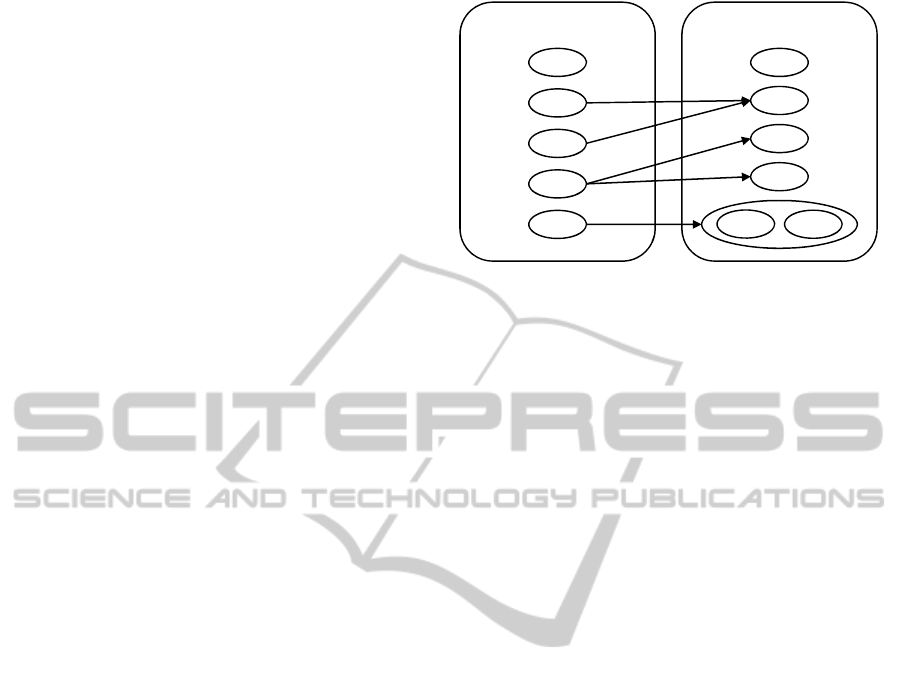
However, in practical applications these require-
ments may at best be approximated. If the for-
ward and the backward transformation are both to-
tal and mutually inverse, there is a bijective (1:1)
mapping between source models and target models.
Such a mapping does not exist in the case of het-
erogeneous metamodels. This is illustrated in Fig-
ure 1, where c
i j
denote concepts defined in meta-
models (in terms of classes, attributes, or references):
c
11
cannot be mapped at all, c
12
and c
13
are mapped
to the same concept c
22
, c
14
may be mapped non-
deterministically to c
23
or c
24
, and c
15
has to be sim-
ulated by the set of concepts {c
25
, c
26
}.
Thus, total and mutually inverse forward and
backward transformations may be provided only in
degenerate cases such as e.g. an endogenous copy
transformation. In the case of exogenous transfor-
mations, neither the metamodels nor their instances
may be mapped 1:1 onto each other; if the metamod-
els were equivalent, one of them could be simply dis-
carded. However, weaker notions of mutual consis-
tency may still be achieved. For example, the bidi-
rectional transformation may be forward invertible:
The forward transformation is total, and the back-
ward transformation inverts the forward transforma-
tion. But applying the transformations in the oppo-
site direction does not guarantee the reconstruction of
c
11
c
12
c
13
c
14
c
15
MetamodelM
1
MetamodelM
2
c
21
c
22
c
23
c
24
c
25
c
26
Figure 1: Mappings between heterogeneous metamodels.
the original model; rather, this property holds only for
models generated by the forward transformation. The
property of forward invertibility will be demonstrated
by the case study presented in Section 4.
3 QVT RELATIONS (QVT-R)
QVT-R is a declarative language for specifying both
uni- and bidirectional model transformations as well
as consistency checks. This section gives a brief
overview of the concepts underlying QVT-R; see (Ob-
ject Management Group, 2014) for a comprehensive
description and (Reddy et al., 2006) for a tutorial.
In QVT-R, a transformation may be defined on
n ≥ 2 models; here, we assume n = 2. In this case, a
transformation defines a relation T ⊆ M
1
×M
2
, where
M
1
and M
2
denote sets of models.
A transformation is specified in terms of rules,
each of which defines a relation between source and
target patterns. A relation consists of domains, each
of which defines a pattern in one model. A domain
has a unique root object and is marked by a domain
qualifier (checkonly or enforce) which controls how the
domain may be used in a transformation (see below).
Furthermore, a relation may have a when clause which
serves as a precondition for applying the relation. A
relation may also comprise a where clause which es-
sentially acts as a postcondition. Finally, variables
may be declared in a relation which are used in do-
mains, the when and the where clause.
QVT-R offers two modes of execution. In the
checking mode, the transformation is executed on two
models m
1
∈ M
1
and m
2
∈ M
2
. For each relation
and each instance of a source pattern in m
1
, a corre-
sponding target pattern instance is searched in m
2
and
vice versa. If all of these checks succeed, T (m
1
, m
2
)
holds. Domain qualifiers are immaterial in the check-
ing mode.
In the enforcing mode, the transformation is exe-
ACaseStudyforEvaluatingBidirectionalTransformationsinQVTRelations
143

3 4
5 6
1
2
7 8
A1(2)
A2(3)
A3(4)
A1A2(2)
A1A3(0)
A2A4(0)
A3A4(4)
A4(2)
A2(3)
2
A3(4)
0
A1(2)
A4(2)
4
0
2
3
A1
A2 (2)
4
A1A3(0)
A2A4(0)
A3A4 (4)
2
1
2
3
4
5
6
7
8
A2(3)
A3(4)
A1(2)
A4(2)
A1
A2 (2)
A3A4 (4)
a
b
c
d
Figure 2: Gantt diagrams and CPM networks.
cuted either in forward or backward direction. If the
transformation is executed on a given pair of models
m
1
and m
2
in forward direction, m
2
is updated to es-
tablish consistency (and m
1
remains unchanged); like-
wise for the opposite direction. A batch transforma-
tion is treated as a special case (m
2
is empty).
To establish consistency, it is checked for each re-
lation and each source pattern instance whether a cor-
responding instance of the target pattern already ex-
ists. If there is no such instance, it is created if the
target pattern is qualified by enforce; otherwise, an
inconsistency is reported. Furthermore, the check is
performed also in the opposite direction. If there is
no matching source pattern instance, the target pat-
tern instance is deleted if its domain is qualified by
enforce; otherwise, an inconsistency is reported.
Ideally, a transformation may be executed both in
the checking mode and the enforcing mode in either
direction. Thus, a bidirectional transformation may
be defined by a single specification. In this case, all
domains should be qualified by enforce. For a unidi-
rectional transformation, source and target domains
should be qualified by checkonly and enforce, respec-
tively. Transformations which are run only in check-
ing mode should mark all domains by checkonly.
4 CASE STUDY
To evaluate QVT-R’s capabilities for specifying bidi-
rectional transformations, we performed a case study
in the project management domain (Kerzner, 1998).
The case study is kept deliberately small so that it may
be presented in a self-contained paper. It deals with
bidirectional data conversion between different kinds
of activity networks for project scheduling, namely
Gantt diagrams and CPM networks.
The bidirectional transformation is developed in
multiple steps. First, we develop a forward transfor-
mation from Gantt diagrams to CPM networks. Sec-
ond, we construct a corresponding backward trans-
formation. In the third step, we synthesize the uni-
directional transformations into a single bidirectional
transformation. After that, we evaluate the case study
with respect to the criteria mentioned in the introduc-
tion and conclude with some proposals for revising
QVT-R.
4.1 Activity Networks
A Gantt diagram is an acyclic graph whose nodes and
edges represent activities and dependencies, respec-
ENASE2015-10thInternationalConferenceonEvaluationofNovelSoftwareApproachestoSoftwareEngineering
144

Ganttdiagrams
<<enumeration>>
DependencyType
‐ StartStart
‐ StartEnd
‐ EndStart
‐ EndEnd
diagram
elements
GanttDiagram
name :String
1..*
1
Activity
name :String
duration :Integer
dependencyType :
DependencyType
offset :Integer
Dependency
successor
0..*
0..*
predecessor
1
1
incomingDependencies
outgoingDependencies
CPMnetworks
network
elements
CPMNetwork
name :String
1..*
1
incomingActivities
1
0..*
outgoingActivities
targetEvent
sourceEvent
Event
number :Integer
Activity
name :String
duration :Integer
1
0..*
Element
Element
Figure 3: Metamodels for Gantt diagrams and CPM networks.
tively (Figure 2a,c,d). For each activity (time-scaled
bar), a name and a duration is specified. An activ-
ity with duration 0 is a milestone (black diamond). A
dependency from activity a
1
to a
2
defines an order-
ing constraint: a
2
can be started/finished only after
a
1
has been started/finished. Dependencies are clas-
sified into four types: start-start, start-end, end-start,
and end-end. Each dependency has an offset
1
, which
describes the delay between the start/end of the pre-
decessor and the successor activity, respectively.
In contrast to a Gantt diagram, a CPM network
(Critical Path Method) is not time-scaled (Figure 2b).
CPM networks differ from PERT charts only in the
treatment of durations (which are deterministic in a
CPM network and stochastic in a PERT chart); this
difference is immaterial in the context of this paper.
A CPM network is an acyclic graph whose nodes
and edges represent events and activities, respectively.
An event may occur after its incoming activities have
been finished. Conversely, an activity may start after
its source event has occurred. Events do not consume
time. An activity has a name and a duration. Events
are illustrated as circles which are labeled with unique
numbers. An activity is shown as an arrow labeled
with its name and duration. A dashed arrow indicates
a pseudo activity with duration 0.
Both kinds of activity networks may be employed
for scheduling. From the data provided in a Gantt dia-
gram, earliest/latest start/finish times of activities may
be calculated automatically. Activities whose earliest
and latest start times coincide are located on a critical
path. Similar calculations may be performed in CPM
networks (e.g., earliest/latest times of events).
Figure 3 displays the metamodels for Gantt dia-
grams and CPM networks on which our QVT-R trans-
formations are based. The metamodels are defined
as class diagrams in Ecore, EMF’s implementation of
EMOF. In a Gantt diagram, both activities and depen-
1
To simplify matters, we assume non-negative offsets.
dencies are represented as objects; likewise for events
and activities of CPM networks. Our Ecore models
do not include derived attributes for calculated times
because the model transformations deal only with in-
trinsic data.
The metamodels are closely related since Gantt di-
agrams and CPM networks are essentially used for
the same purpose. However, the metamodels are still
heterogeneous; concepts may not be mapped 1:1 to
each other. First, a Gantt activity is mapped not only
to a CPM activity, but also to a source and a target
event. Second, the different types of Gantt dependen-
cies have to be simulated by CPM activities connect-
ing appropriate events. Third, event numbers have no
correspondence in Gantt diagrams.
4.2 Forward Transformation
A Gantt diagram is transformed into an equivalent
CPM network as follows: Each Gantt activity is
mapped to a source event, a target event, and a con-
necting CPM activity with the same name and dura-
tion. The events are numbered in a unique way. Each
Gantt dependency is mapped to a CPM activity, as
well. The type of the Gantt dependency determines
the source and target events; for example, in the case
of a start-start dependency the source event of the pre-
decessor activity is connected to the source event of
the successor activity. The name of the CPM activ-
ity is composed from the predecessor and successor
names, and the duration is copied from the depen-
dency’s offset. With these rules, the diagram of Fig-
ure 2a is transformed into the network of Figure 2b.
Figure 4 shows the QVT-R specification of the for-
ward transformation. The transformation operates on
a diagram and a network (line 1). The direction of the
transformation is not specified explicitly, but can be
inferred from the domain qualifiers of the relations.
The relation Diagram2Network (lines 2–6) maps a
ACaseStudyforEvaluatingBidirectionalTransformationsinQVTRelations
145

1 transformation f orwar d ( diagram : g a n tt , network : cpm ) {
2 top r e l a t i o n Diagram2Network {
3 name : S t r i n g ;
4 checkonly domain diagram gd diagram : g a n t t : : GanttDiagram {name = name};
5 enforce domain network cn net w ork : cpm : : CPMNetwork {name = name};
6 }
7 top r e l a t i o n A c t i v i t y 2 A c t i v i t y {
8 name : S t r i n g ; d u r a t i o n : I n t e g e r ;
9 sourceEventNumber , targetEventNumber : I n t e g e r ;
10 checkonly domain diagram g d a c t i v i t y : g a n t t : : A c t i v i t y {
11 name = name , d u r a t i o n = du r a t i o n ,
12 diagram = gd diagram : g a n t t : : GanttDiagram {}
13 };
14 enforce domain network c n a c t i v i t y : cpm : : A c t i v i t y {
15 name = name , d u r a t i o n = du r a t i o n ,
16 network = cn n e twork : cpm : : CPMNetwork {} ,
17 sourceEvent = cn sourc eEve nt : cpm : : Event {
18 network = cn network , number = sourceEventNumber
19 } ,
20 t a r g e t E v e n t = c n t a r g e t E v e n t : cpm : : Event {
21 network = cn network , number = targetEventNumber
22 }
23 };
24 when {
25 Diagram2Network ( gd diagram , cn networ k ) ;
26 }
27 where {
28 sourceEventNumber = 2∗ n o O f A c t i v i t y ( g d a c t i v i t y ) − 1 ;
29 targetEventNumber = 2∗ n o O f A c t i v i t y ( g d a c t i v i t y ) ;
30 }
31 }
32 top r e l a t i o n D e p e n d e n c y 2 A c t i v i t y {
33 c n p r e d A c t i v i t y , c n s u c c A c t i v i t y : cpm : : A c t i v i t y ;
34 gd dependencyType : g a n t t : : DependencyType ;
35 o f f s e t : I n t e g e r ; name : S t r i n g ;
36 checkonly domain diagram gd dependency : g a n t t : : Dependency {
37 o f f s e t = o f f s e t ,
38 diagram = gd diagram : g a n t t : : GanttDiagram {} ,
39 predecessor = g d p r e d A c t i v i t y : g a n t t : : A c t i v i t y {} ,
40 successor = g d s u c c A c t i v i t y : g a n t t : : A c t i v i t y {} ,
41 dependencyType = gd dependencyType
42 };
43 enforce domain network c n a c t i v i t y : cpm : : A c t i v i t y {
44 d u r a t i o n = o f f s e t , name = name,
45 network = cn n e twork : cpm : : CPMNetwork {} ,
46 sourceEvent = cn sourc eEve nt : cpm : : Event {} ,
47 t a r g e t E v e n t = c n t a r g e t E v e n t : cpm : : Event {}
48 };
49 when {
50 Diagram2Network ( gd diagram , cn networ k ) ;
51 A c t i v i t y 2 A c t i v i t y ( g d p r e d A c t i v i t y , c n p r e d A c t i v i t y ) ;
52 A c t i v i t y 2 A c t i v i t y ( g d s u c c A c t i v i t y , c n s u c c A c t i v i t y ) ;
53 }
54 where {
55 cn sour ceEv ent = sourceEvent ( c n p r e d A c t i v i t y , gd dependencyType ) ;
56 c n t a r g e t E v e n t = t a r g e t E v e n t ( c n s u c c A c t i v i t y , gd dependencyType ) ;
57 name = g d p r e d A c t i v i t y . name + ’−>’ + g d s u c c A c t i v i t y . name ;
58 }
59 }
60 }
Figure 4: Forward transformation.
ENASE2015-10thInternationalConferenceonEvaluationofNovelSoftwareApproachestoSoftwareEngineering
146

diagram to a network of the same name. The rela-
tion Activity2Activity (7–31) transforms a Gantt activ-
ity to a CPM activity. Its source pattern consists of
a Gantt activity; pattern matching binds variables for
the name, the duration, and the enclosing diagram. Its
when clause ensures that the relation is applied only
after the diagram has been transformed into a net-
work. Furthermore, the relation call is used to retrieve
the corresponding network object. The target pattern
consists of a CPM activity whose name and duration
are copied from the Gantt activity. Furthermore, the
activity is inserted into the network which has been re-
trieved via the relation call in the when clause. Source
and target events are created along with the activity;
their numbers are calculated in the where clause. To
this end, the number of the Gantt activity — say n —
is determined from the source model (its index in the
list for the containment reference from the diagram).
Source and target event are assigned the unique num-
bers 2n − 1 and 2n.
noOfActivity (lines 28–29) is a query, i.e., a func-
tion whose body is specified by an OCL expression.
Queries may be defined as part of a QVT-R specifica-
tion; due to the lack of space, all query definitions are
omitted in this paper.
The relation Dependency2Activity (32–59) maps a
Gantt dependency to a CPM activity. The source pat-
tern is composed of a dependency as well as its pre-
decessor and successor activities. The when clause
ensures that the enclosing diagram and the predeces-
sor and successor activities have already been trans-
formed. The target pattern consists of the activity to
be created and the (already existing) events to which it
is to be connected. The variables for the source event
and the target event are bound in the where clause, tak-
ing the dependency type into account. Furthermore,
the where clause composes the name of the activity
for the dependency from the names of the predecessor
and successor activities. Finally, the duration of the
activity is copied from the offset of the dependency.
The forward transformation performs a straight-
forward syntax-based translation of a Gantt diagram
into a CPM network: The source model is trans-
formed in terms of syntactic elements — the diagram
and its composed activities and dependencies — into
the target model. The transformation is total, deter-
ministic and injective, but it is not surjective: For ex-
ample, the CPM network 1 → A1 → 2 → A2 → 3 can-
not be generated by the forward transformation be-
cause A1 and A2 share the common event 2.
4.3 Backward Transformation
The backward transformation may be performed in
different ways, meeting different requirements. A
syntax-based transformation which may be applied to
any network (including e.g. 1 → A
1
→ 2 → A
2
→ 3)
maps each event to a milestone, each real activity to
an activity, and each pseudo activity to a dependency.
Figure 2d demonstrates that this backward transfor-
mation does not invert the forward transformation. In
general, the resulting Gantt diagram contains at least
twice as many activities as the original Gantt diagram.
Thus, an iterative application would generate a se-
quence of monotonically growing Gantt diagrams.
Instead, we develop a pattern-based backward
transformation which inverts the forward transforma-
tion (but is partial rather than total). In the backward
transformation, it has to be decided whether a network
activity is transformed to an activity or a dependency
in the diagram. This decision cannot be performed
uniquely using only structural information. For ex-
ample, we may attempt to calculate a maximal match-
ing, i.e., a maximal set of edges such that no node is
incident to more than one edge in the set, and trans-
form the edges in the matching back to activities. For
this purpose, the algorithm of Edmonds may be used
(see (Jungnickel, 2008), Section 13.4). However, the
maximal matching is not unique, as demonstrated in
Figure 2b,c.
To avoid non-deterministic behavior, the back-
ward transformation relies on coding conventions ap-
plied in the forward transformation. For example, a
CPM activity which was generated from a Gantt ac-
tivity may be recognized with the help of event num-
bers: The number n of its source event is odd, and the
number of its target event is n + 1.
In the specification of the backward transforma-
tion (Figure 5), the relation Activity2Activity maps a
CPM activity to a Gantt activity of the same name and
duration when the query MapToActivity, which exploits
the coding convention explained above, returns true
(line 15). Similarly, the relation Activity2Dependency is
applicable only when the complementary query Map-
ToDependency evaluates to true (line 37). From the
source and the target event, the respective owning ac-
tivities are retrieved, again relying on coding conven-
tions (38–39). From these CPM activities, the corre-
sponding activities in the Gantt diagram are retrieved
by relation calls (40–41). The type of the dependency
is determined in the where clause (44).
4.4 Bidirectional Transformation
The bidirectional transformation is synthesized from
the unidirectional transformations by merging corre-
sponding relations. All domains are qualified by en-
force. Domains, when and where clauses are merged
ACaseStudyforEvaluatingBidirectionalTransformationsinQVTRelations
147

1 trans formation backward ( network : cpm , diagram : g a n t t ) {
2 top r e l a t i o n Network2Diagram { . . . }
3 top r e l a t i o n A c t i v i t y 2 A c t i v i t y {
4 name : S t r i n g ; d u r a t i o n : I n t e g e r ;
5 checkonly domain network c n a c t i v i t y : cpm : : A c t i v i t y {
6 name = name , d u r a t i o n = du r a t i o n ,
7 network = cn n e twork : cpm : : CPMNetwork {}
8 };
9 enforce domain diagram g d a c t i v i t y : g a n t t : : A c t i v i t y {
10 name = name , d u r a t i o n = du r a t i o n ,
11 diagram = gd diagram : g a n t t : : GanttDiagram {}
12 };
13 when {
14 Network2Diagram ( cn network , gd diagram ) ;
15 ma p ToA c t i vity ( c n a c t i v i t y ) ;
16 }
17 }
18 top r e l a t i o n A c t i v i t y 2 D e p e n d e n c y {
19 c n p r e d A c t i v i t y , c n s u c c A c t i v i t y : cpm : : A c t i v i t y ;
20 gd dependencyType : g a n t t : : DependencyType ;
21 o f f s e t : I n t e g e r ;
22 checkonly domain network c n a c t i v i t y : cpm : : A c t i v i t y {
23 d u r a t i o n = o f f s e t ,
24 network = cn n e twork : cpm : : CPMNetwork {} ,
25 sourceEvent = cn sourc eEve nt : cpm : : Event {} ,
26 t a r g e t E v e n t = c n t a r g e t E v e n t : cpm : : Event {}
27 };
28 enforce domain diagram gd dependency : g a n t t : : Dependency {
29 o f f s e t = o f f s e t ,
30 diagram = gd diagram : g a n t t : : GanttDiagram {} ,
31 predecessor = g d p r e d A c t i v i t y : g a n t t : : A c t i v i t y {} ,
32 successor = g d s u c c A c t i v i t y : g a n t t : : A c t i v i t y {} ,
33 dependencyType = gd dependencyType
34 };
35 when {
36 Network2Diagram ( cn network , gd diagram ) ;
37 mapToDependency ( c n a c t i v i t y ) ;
38 c n p r e d A c t i v i t y = o w n i n g A c t i v i t y ( cn sourceEven t ) ;
39 c n s u c c A c t i v i t y = o w n i n g A c t i v i t y ( cn ta r g e t E v e n t ) ;
40 A c t i v i t y 2 A c t i v i t y ( c n p r e d A c t i v i t y , g d p r e d A c t i v i t y ) ;
41 A c t i v i t y 2 A c t i v i t y ( c n s u c c A c t i v i t y , g d s u c c A c t i v i t y ) ;
42 }
43 where {
44 gd dependencyType = dependencyType ( c n a c t i v i t y ) ;
45 }
46 }
47 }
Figure 5: Backward transformation.
component-wise. Merging is straightforward for do-
mains: The respective domain patterns coincide in
common parts and contain only elementary expres-
sions (variables and constants). Thus, the union of
patterns is well-defined, and matching may be per-
formed in both directions. In contrast, manual adjust-
ments may be required after a union of the when and
where clauses to ensure bidirectional executability.
Execution of a relation involves the following
kinds of steps: match an object in the source do-
main, bind a variable, call a relation, check a con-
straint, create a target domain object, or assign an ob-
ject property. The order in which these steps are exe-
cuted must satisfy data flow constraints which are de-
scribed in the QVT-R standard ((Object Management
Group, 2014), Section 7.5), and does not necessarily
match the textual order in the specification. Depend-
ing on the binding states of the variables, equations
may play a dual role: If all variables are bound, an
equation acts as a check; otherwise, it is used to bind
an object property or assign a value to a variable. In
the case of a bidirectional transformation, it has to be
ENASE2015-10thInternationalConferenceonEvaluationofNovelSoftwareApproachestoSoftwareEngineering
148

1 top r e l a t i o n A c t i v i t y 2 A c t i v i t y {
2 name : S t r i n g ; d u r a t i o n : I n t e g e r ;
3 sourceEventNumber , targetEventNumber : I n t e g e r ;
4 enforce domain diagram g d a c t i v i t y : g a n t t : : A c t i v i t y {
5 name = name , d u r a t i o n = du r a t i o n ,
6 diagram = gd diagram : g a n t t : : GanttDiagram {}
7 };
8 enforce domain network c n a c t i v i t y : cpm : : A c t i v i t y {
9 name = name , d u r a t i o n = du r a t i o n ,
10 network = cn n e twork : cpm : : CPMNetwork {} ,
11 sourceEvent = cn sourc eEve nt : cpm : : Event {
12 network = cn network , number = sourceEventNumber
13 } , −− F orward t r a n s f o r m a t i o n
14 t a r g e t E v e n t = c n t a r g e t E v e n t : cpm : : Event {
15 network = cn network , number = targetEventNumber
16 } −− For ward t r a n s f o r m a t i o n
17 };
18 when {
19 Diagram2Network ( gd diagram , cn networ k ) ;
20 i f g d a c t i v i t y . o c l I s U n de fi n e d ( ) then
21 m a pToA c t ivit y ( c n a c t i v i t y )
22 else
23 true
24 e n d i f ; −− Backward t r a n s f o r m a t i o n
25 sourceEventNumber =
26 i f c n a c t i v i t y . o c l I s U n de fi n e d ( ) then
27 2∗ n o O f A c t i v i t y ( g d a c t i v i t y ) − 1
28 else
29 c n a c t i v i t y . sourceEvent . number
30 endif ; −− Forward t r a n s f o r m a t i o n
31 targetEventNumber =
32 i f c n a c t i v i t y . o c l I s U n de fi n e d ( ) then
33 2∗ n o O f A c t i v i t y ( g d a c t i v i t y )
34 else
35 c n a c t i v i t y . t a r g e t E v e n t . number
36 endif ; −− Forward t r a n s f o r m a t i o n
37 }
38 }
Figure 6: Bidirectional transformation: Activities.
ensured that the data flow constraints are satisfied for
both directions.
A bidirectional relation may contain unidirec-
tional elements, i.e., elements which are relevant for
only one transformation direction. QVT-R does not
provide language constructs for designating elements
as unidirectional. The QVT-R user has to ensure that
conceptually unidirectional elements do not prevent
execution of the relation in the opposite direction.
Figure 6 displays the bidirectional relation be-
tween Gantt and CPM activities. Unidirectional
elements are annotated with comments. While
sourceEvent and targetEvent are relevant only for the
forward direction, they do no harm in the backward
direction. However, the unidirectional expressions in
the when and the where clause cannot be copied liter-
ally from the forward and the backward relation.
In the backward relation, the call of the query
mapToActivity (line 15 in Figure 5) checks that the
CPM activity actually represents a Gantt activity. If
this call is copied literally to the when clause of the
bidirectional relation, execution in the forward direc-
tion aborts with a runtime error because the variable
cn activity is still unbound. Thus, the evaluation of
the query is performed in a conditional expression
(lines 20–24 in Figure 6): The transformation direc-
tion is queried by accessing the binding state of the
variable gd activity. If the variable is unbound, the rela-
tion is executed in backward direction, and the query
mapToActivity is evaluated. Otherwise, the constraint is
ignored by evaluating the constant true.
A similar problem occurs in the calculation of the
event numbers. In the forward relation, the numbers
are calculated in the where clause from the number of
the Gantt activity in the opposite domain (lines 28–29
in Figure 4). Therefore, we rewrite these expressions
into conditional expressions (lines 25–36 in Figure 6).
If these expressions are evaluated in backward direc-
ACaseStudyforEvaluatingBidirectionalTransformationsinQVTRelations
149

1 top r e l a t i o n D e p e n d e n c y 2 A c t i v i t y {
2 c n p r e d A c t i v i t y , c n s u c c A c t i v i t y : cpm : : A c t i v i t y ;
3 gd dependencyType : g a n t t : : DependencyType ;
4 o f f s e t : I n t e g e r ;
5 name : S t r i n g ;
6 enforce domain diagram gd dependency : g a n t t : : Dependency {
7 o f f s e t = o f f s e t ,
8 diagram = gd diagram : g a n t t : : GanttDiagram {} ,
9 predecessor = g d p r e d A c t i v i t y : g a n t t : : A c t i v i t y {} ,
10 successor = g d s u c c A c t i v i t y : g a n t t : : A c t i v i t y {} ,
11 dependencyType = gd dependencyType
12 };
13 enforce domain network c n a c t i v i t y : cpm : : A c t i v i t y {
14 d u r a t i o n = o f f s e t ,
15 network = cn n e twork : cpm : : CPMNetwork {} ,
16 name = name ,
17 sourceEvent = cn sourc eEve nt : cpm : : Event {} ,
18 t a r g e t E v e n t = c n t a r g e t E v e n t : cpm : : Event {}
19 };
20 when {
21 Diagram2Network ( gd diagram , cn networ k ) ;
22 i f gd dependency . o c l I s U n d e f i ne d ( ) then
23 mapToDependency ( c n a c t i v i t y )
24 else
25 true
26 e n d i f ; −− Backward t r a n s f o r m a t i o n
27 c n p r e d A c t i v i t y = o w n i n g A c t i v i t y ( cn sourceEven t ) ; −− Backward t r a n s f o r m a t i o n
28 c n s u c c A c t i v i t y = o w n i n g A c t i v i t y ( cn ta r g e t E v e n t ) ; −− Backward t r a n s f o r m a t i o n
29 A c t i v i t y 2 A c t i v i t y ( g d p r e d A c t i v i t y , c n p r e d A c t i v i t y ) ;
30 A c t i v i t y 2 A c t i v i t y ( g d s u c c A c t i v i t y , c n s u c c A c t i v i t y ) ;
31 gd dependencyType =
32 i f gd dependency . o c l I s U n d e f i ne d ( ) then
33 dependencyType ( c n a c t i v i t y )
34 else
35 gd dependency . dependencyType
36 endif ; −− Backward t r a n s f o r m a t i o n
37 }
38 where {
39 cn sour ceEv ent = sourceEvent ( c n p r e d A c t i v i t y , gd dependencyType ) ;
40 −− F orward t r a n s f o r m a t i o n
41 c n t a r g e t E v e n t = t a r g e t E v e n t ( c n s u c c A c t i v i t y , gd dependencyType ) ;
42 −− F orward t r a n s f o r m a t i o n
43 name = g d p r e d A c t i v i t y . name + ’−>’ + g d s u c c A c t i v i t y . name ;
44 −− F orward t r a n s f o r m a t i o n
45 }
46 }
Figure 7: Bidirectional transformation: Dependencies.
tion, they return the value to which the variable has
been bound in pattern matching. Please notice that
these expressions were moved from the where clause
to the when clause. In the where clause, the expres-
sions would not work because the variable cn activity is
already bound (by instantiation of the target pattern).
The bidirectional relation Dependency2Activity is
constructed similarly (Figure 7). Again, all unidi-
rectional expressions are annotated by comments. In
lines 22–26 and 31–36, we constructed conditional
expressions querying the binding state, as demon-
strated above. Since this approach does not work in
the where clause, the expression for the dependency
type was moved to the when clause.
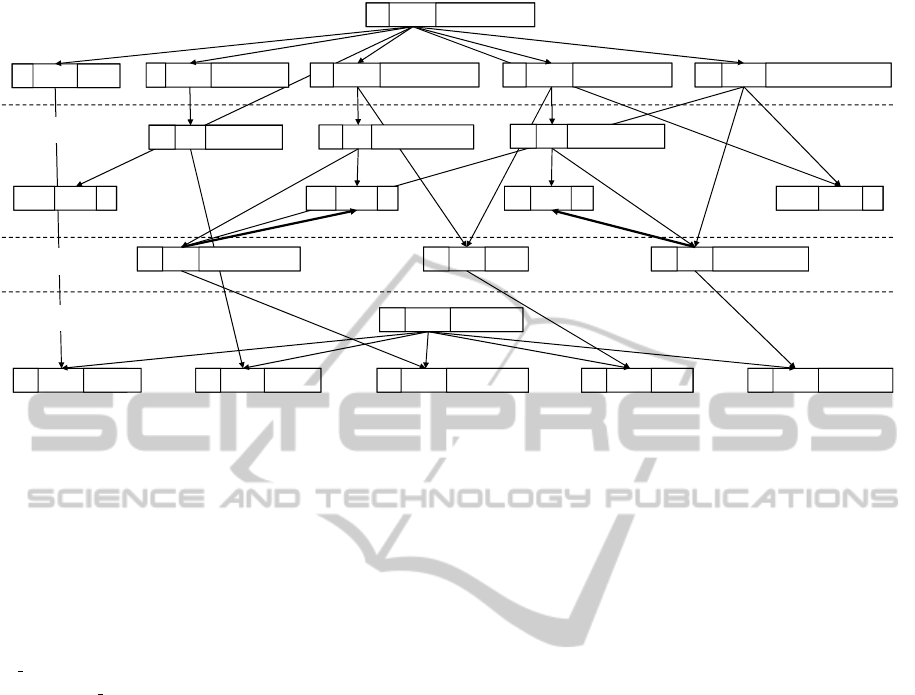
For each transformation direction, we have to
check whether the data flow constraints described in
the QVT-R standard (see Section 7.5, p. 18) are satis-
fied. Figure 8 demonstrates this for the forward di-
rection. To this end, a graph is constructed which
contains a node for each expression occurring in the
relation. Each node is partitioned into three com-
partments. The first compartment references the line
number of the expression. The second compartment
specifies the action to be performed. If the action re-
ENASE2015-10thInternationalConferenceonEvaluationofNovelSoftwareApproachestoSoftwareEngineering
150
8matchgd_diagram
9 match gd_predActivity 10 match gd_succActivity
11 match gd_dependencyType
21
call
cn_network
29 call cn_predActivity
30 call
cn_succActivity
22‐26 check … 27 check … 31..36 check …28 check …
39 bind cn_sourceEvent 41 bind cn_targetEvent43 bind name
13 create cn_activity
14 assign duration 15 assign network 16 assign name
17
assign
sourceEvent 18
assign
targetEvent
source domain
when clause
target domain
where clause
7 match offset
6 match gd_dependency
Figure 8: Dependency graph for the forward execution of Dependency2Activity.
sults in the binding of some variable, the name of this
variable is shown in the third compartment. Arrows
represent data flow dependencies. An arrow from
node s to node t implies that s binds a value to some
variable which is used in t.
The graph is acyclic, but contains an anomaly:
Two arrows point upwards from nodes in where
clauses to nodes in when clauses. For example,
we obtain the following chain of actions: (1) Bind
cn predActivity by a relation call (when clause, line 29).
(2) Bind cn sourceEvent by navigation in the target
model (where clause, line 39). (3) (Redundantly)
check the equation in line 27 of the when clause.
Dependencies of the when clause on the where
clause are allowed in QVT-R. Section 7.5 of the stan-
dard demands only that the expressions of a relation
may be arranged into a consistent order of evaluation
satisfying the data flow constraints.
While the bidirectional transformation behaves as
required in enforcing mode in both directions, it does
not work correctly in checking mode. The simulation
of unidirectional expressions by conditional expres-
sions querying the binding state implies that these ex-
pressions are effectively ignored. In checking mode,
all variables in domain patterns have already been
bound when an expression in a when or where clause
is evaluated. For example, the conditional expres-
sion for checking in backward direction whether a
CPM activity should be mapped onto a Gantt activ-
ity (lines 20–24 in Figure 6) always evaluates to true.
However, for CPM activities to be mapped onto Gantt
dependencies there is no corresponding Gantt activ-
ity. This results in an error even if the diagram and
the network are mutually consistent.
4.5 Evaluation
In the following, we summarize the lessons learned
from the case study. The presentation is structured
according to the criteria introduced in Section 1.
Expressiveness. Construction of bidirectional
transformations is inherently difficult due to hetero-
geneity of the underlying metamodels (Figure 1).
Thus, there is a problem-inherent limitation concern-
ing the functionality of bidirectional transformations.
In our case study, Gantt diagrams and CPM networks
are closely related, but the concepts of activity and
dependency in Gantt diagrams cannot be mapped
1:1 to the concepts of activity and event in CPM
networks. While the forward transformation is total,
the backward transformation may reconstruct the
original Gantt diagram, but can be applied only to
CPM networks generated by the forward transfor-
mation. This problem-inherent limitation would also
hold if we had used any other model transformation
language.
An important added value of QVT-R consists in its
language support for relational specifications of bidi-
rectional transformations. In this respect, expressive-
ness of QVT-R is concerned with the following is-
sue: Suppose that we constructed two unidirectional
transformations that exhibit the desired behavior (as
in our case study). Is it possible to synthesize a single,
equivalent bidirectional transformation? The more of-
ten the answer to this question is positive, the more
expressive is QVT-R compared to languages support-
ing only unidirectional transformations.
In our case study, the synthesis succeeded to a
ACaseStudyforEvaluatingBidirectionalTransformationsinQVTRelations
151

large extent. The resulting bidirectional transfor-
mation works correctly in enforcing mode and ex-
hibits the same behavior as the unidirectional trans-
formations from which it was synthesized. Unfortu-
nately, the transformation does not behave correctly in
checking mode. This is due to the fact that our simu-
lation of unidirectional expressions does not work in
checking mode (see previous subsection).
Conciseness. Since QVT-R is a declarative rather
than procedural language, specifications written in
QVT-R are concise inasmuch as they just describe
the patterns to be searched and instantiated, without
specifying algorithmic details to be taken care of by a
QVT-R execution engine.
Furthermore, as far as bidirectional transforma-
tions are concerned, conciseness results from the fact
that both transformation directions can be expressed
by a single relational specification. In other lan-
guages, separate transformations have to be defined
for each direction.
Readability. Another relevant issue is cognitive
complexity: How easy is it to understand a QVT-R
specification of a transformation? In our case study,
the unidirectional transformations are relatively easy
to understand. The relations have a straightforward
semantics: Search an instance of the source pattern,
check the when clause, and instantiate the target pat-
tern using the where clause. The when clause and the
where clause have clearly separated responsibilities:
They act as pre- and postconditions. The order in
which relations are executed may be constrained by
relation calls in the when clauses.
However, if we specify separate forward and back-
ward transformations, we have to ensure manually
that the opposite transformations are mutually consis-
tent. The full power of QVT-R is exploited only when
we construct a bidirectional transformation which is
executable in both the enforcing mode (in both direc-
tions) and the checking mode. The term relational
specification suggests that such a relation may be de-
fined declaratively at a high level of abstraction.
Unfortunately, the bidirectional transformation
constructed in the case study does not meet these ex-
pectations. The author of the transformation has to
consider in detail the execution semantics of the spec-
ification. For each mode and each direction, it has to
be verified that the relations work correctly and ex-
ecution satisfies all data flow constraints. To make
the transformation executable in both directions, it
may be necessary to simulate unidirectional expres-
sions. However, this simulation impedes readability
and does not work in checking mode. Furthermore,
the separation of responsibilities is blurred: Condi-
tional expressions have to be moved to the when clause
because they do not work in the where clause. Finally,
execution of the when clause and the where clause may
be intertwined, resulting in further confusion. Alto-
gether, we conclude that the bidirectional transforma-
tion which we constructed in this paper is very hard
to understand (although it was constructed systemati-
cally from two unidirectional transformations).
Semantic Soundness. To a large extent, cognitive
complexity results from flaws in the semantics defi-
nition. In unidirectional transformations, source pat-
tern, target pattern, when and where clause have clearly
separated responsibilities. But for bidirectional trans-
formations, the responsibilities are blurred. An ex-
pression acting as a precondition in the forward di-
rection may play the role of a postcondition in the
backward direction. Thus, it is by no means straight-
forward to decide whether an expression should go
the when clause or the where clause.
The unclear separation of responsibilities even
goes as far as allowing dependencies of expressions
in the when clause on expressions in the where clause.
This liberty results from the fact that a relation is es-
sentially considered as a set of expressions which are
evaluated in an order conforming to data flow con-
straints (before a variable may be accessed, it must
be bound). Unfortunately, this declarative approach
to defining the execution semantics does not guaran-
tee confluence in general: If the data flow constraints
permit different orders of evaluation, the results of ex-
ecution may differ (inadvertent non-determinism).
4.6 Proposals for Revising QVT-R
Based on the experiences gained through the case
study, we propose several revisions to QVT-R and il-
lustrate these revisions with an example.
Model Qualifiers. In QVT-R, domain qualifiers de-
termine in which way a domain of a relation may be
used in a transformation. These qualifiers may dif-
fer from relation to relation. Since we did not en-
counter any use cases requiring this degree of free-
dom, we suggest to replace local domain qualifiers by
global model qualifiers specifying the roles of models
in transformations. The model qualifiers are inherited
by all relations, i.e., the qualifier of a model consis-
tently applies to the domains of all relations.
Unidirectional Expressions. Frequently, expres-
sions specified in a relation are relevant in only one
direction. The “solution” presented in this paper —
ENASE2015-10thInternationalConferenceonEvaluationofNovelSoftwareApproachestoSoftwareEngineering
152

1 trans formation b i d i r e c t i o n a l R e v i s e d ( enforce diagram : g a ntt , enforce network : cpm) {
2 . . .
3 top r e l a t i o n D e p e n d e n c y 2 A c t i v i t y {
4 c n p r e d A c t i v i t y , c n s u c c A c t i v i t y : cpm : : A c t i v i t y ;
5 gd dependencyType : g a n t t : : DependencyType ;
6 o f f s e t : I n t e g e r ; name : S t r i n g ;
7 domain diagram gd dependency : g a n t t : : Dependency {
8 o f f s e t = o f f s e t ,
9 diagram = gd diagram : g a n t t : : GanttDiagram {} ,
10 predecessor = g d p r e d A c t i v i t y : g a n t t : : A c t i v i t y {} ,
11 successor = g d s u c c A c t i v i t y : g a n t t : : A c t i v i t y {} ,
12 dependencyType = gd dependencyType
13 };
14 domain network c n a c t i v i t y : cpm : : A c t i v i t y {
15 d u r a t i o n = o f f s e t , name = name,
16 network = cn n e twork : cpm : : CPMNetwork {} ,
17 sourceEvent = cn sourc eEve nt : cpm : : Event {} ,
18 t a r g e t E v e n t = c n t a r g e t E v e n t : cpm : : Event {}
19 };
20 when {
21 Diagram2Network ( gd diagram , cn networ k ) ;
22 to diagram {
23 mapToDependency ( c n a c t i v i t y ) ;
24 c n p r e d A c t i v i t y = o w n i n g A c t i v i t y ( cn sour ceEv ent ) ;
25 c n s u c c A c t i v i t y = o w n i n g A c t i v i t y ( c n t a r g e t E v e n t ) ;
26 }
27 A c t i v i t y 2 A c t i v i t y ( g d p r e d A c t i v i t y , c n p r e d A c t i v i t y ) ;
28 A c t i v i t y 2 A c t i v i t y ( g d s u c c A c t i v i t y , c n s u c c A c t i v i t y ) ;
29 }
30 where {
31 to network {
32 cn sour ceEv ent = sourceEvent ( c n p r e d A c t i v i t y , gd dependencyType ) ;
33 cn t a r g e t E v e n t = t a r g e t E v e n t ( c n s u c c A c t i v i t y , gd dependencyType ) ;
34 name = g d p r e d A c t i v i t y . name + ’−>’ + g d s u c c A c t i v i t y . name ;
35 }
36 to diagram {
37 gd dependencyType = dependencyType ( c n a c t i v i t y ) ;
38 }
39 }
40 }
41 }
Figure 9: Bidirectional relation for dependencies in revised notation.
conditional expressions querying the binding state —
may be considered only a workaround which signif-
icantly increases cognitive complexity and does not
work in the checking mode. Therefore, we propose
to support unidirectional expressions directly in the
QVT-R language. To this end, we propose to place
an optional direction specification before an expres-
sion list occurring in a relation. The direction speci-
fication is indicated by the keyword to followed by a
model name. If the direction specification is present,
the expression list is considered only in the direction
of the specified model.
Structured Execution of Relations. To eliminate
inadvertent non-determinism and to ensure separation
of responsibilities, we propose to structure the execu-
tion of relations into clearly delineated phases: (1)
Match source domain. (2) Evaluate when clause. (3)
Evaluate where clause. (4) Instantiate target domain.
Each phase may rely only on previous phases. Since
expressions may have to be evaluated after instan-
tiation of the target domain, we propose to add an
optional post clause which is executed in phase (5)
(which, however, is not needed in our case study).
Example. Figure 9 presents the revised bidirec-
tional relation for transforming dependencies into ac-
tivities. The domain qualifiers were replaced with
model qualifiers. The relation may be synthesized
in a straightforward way from the forward and the
backward relation. The when and the where clause
are merged separately; unidirectional expressions are
ACaseStudyforEvaluatingBidirectionalTransformationsinQVTRelations
153

marked with a direction specification. The resulting
relation is slightly more concise and considerably eas-
ier to understand than the standard-compliant bidirec-
tional relation in Figure 7. Furthermore, it works in
checking mode, as well.
5 RELATED WORK
The vast majority of transformation languages sup-
ports only unidirectional transformations; consider
e.g. the well-known ATL language (Jouault et al.,
2008). However, bidirectionality is not a unique fea-
ture of QVT-R (Czarnecki et al., 2009). The most
prominent competitors are languages and tools based
on triple graph grammars (Sch
¨
urr, 1995; K
¨
onigs and
Sch
¨
urr, 2006; Sch
¨
urr and Klar, 2008; Kindler and
Wagner, 2007). In contrast to the grammar-based ap-
proach, QVT-R follows a relational paradigm where a
transformation is specified by a set of relations among
patterns to be instantiated in the participating models.
To the best of our knowledge, our work is unique
inasmuch as it addresses the evaluation of QVT-R
with respect to bidirectional transformations. Other
work focuses primarily on the formal definition of
QVT-R’s semantics (Stevens, 2010; Stevens, 2013;
Guerra and de Lara, 2012; de Lara and Guerra, 2009).
While support of bidirectional transformations consti-
tutes the most interesting (and challenging feature) of
QVT-R, this issue has been neglected severely from
the application point of view. The standard itself
provides only examples of unidirectional transforma-
tions. We are aware of only a single application-
oriented paper dealing with bidirectional transforma-
tions in QVT-R (Schwichtenberg et al., 2014), which
uses, but does not evaluate QVT-R’s features for spec-
ifying bidirectional transformations.
6 CONCLUSION
Bidirectional transformations are required in a num-
ber of applications of industrial relevance, includ-
ing bidirectional data converters and round-trip en-
gineering. In this paper, we presented a case study
for evaluating QVT-R, a declarative language which
was defined in an OMG standard. QVT-R is distin-
guished from other model transformation languages
by providing the concept of a relational specification
of a transformation which may be executed in differ-
ent modes and different directions. For bidirectional
transformations, this approach reduces the effort of
writing specifications and contributes to providing
mutually consistent forward and backward transfor-
mations. However, the case study revealed severe
deficiencies of QVT-R: The specification of a bidi-
rectional transformation between Gantt diagrams and
CPM networks works only in enforcing mode, it is
very hard to understand since the QVT-R user has to
consider the details of the execution semantics care-
fully, and the execution semantics is defined in an un-
clear way. Therefore, we proposed several revisions
of QVT-R to remove these deficiencies.
The work presented in this paper is embedded into
a more comprehensive investigation into bidirectional
transformations in QVT-R. In (Westfechtel, 2015),
seven case studies are explored, ranging from sim-
ple cases (e.g., migration between unweighted and
weighted Petri nets) to complex cases such as an
object-relational mapping. For each of the cases, a
QVT-R solution is provided. Furthermore, the trans-
formations are classified with respect to their formal
properties, and guidelines are given for applying the
QVT-R language as it stands. The problems occurring
the project management case study presented here
were observed also in other case studies, and most of
the proposed language revisions may already be de-
duced from the project management case.
Currently, we are using QVT-R to implement
a tool for round-trip engineering between UML
class diagrams and Java code. The tool is real-
ized as part of Valkyrie, a model-driven environment
for model-driven software engineering (Buchmann,
2012). Valkyrie is based on the EMF version of the
UML 2 metamodel; the Java model is provided by
MoDisco (Bruneli
`
ere et al., 2014). The round-trip en-
gineering tool will operate incrementally, propagat-
ing changes forth and back. Thus, the tool provide
us with a non-trivial case study dealing with incre-
mental transformations, which go beyond the scope
of the current paper. Furthermore, we will compare
the QVT-R-based tool against an earlier implementa-
tion based on triple graph grammars (Buchmann and
Westfechtel, 2013). In addition, we will also solve
the transformation problems presented in (Westfech-
tel, 2015) with triple graph grammars. In this way,
we will obtain a set of case studies for a comparative
evaluation of QVT-R and triple graph grammars.
ACKNOWLEDGEMENTS
The specifications presented in this paper were devel-
oped and tested with medini QVT, version 1.7.0 under
Eclipse Indigo.
ENASE2015-10thInternationalConferenceonEvaluationofNovelSoftwareApproachestoSoftwareEngineering
154

REFERENCES
Bruneli
`
ere, H., Cabot, J., Dup
´
e, G., and Madiot, F.
(2014). MoDisco: A model-driven reverse engineer-
ing framework. Information and Software Technology,
56(8):1012–1032.
Buchmann, T. (2012). Valkyrie: A UML-based model-
driven environment for model-driven software engi-
neering. In Hammoudi, S., van Sinderen, M., and
Cordeiro, J., editors, Proceedings of the 7th Interna-
tional Conference on Software Paradigm Trends (IC-
SOFT 2012), pages 147–157. ScitePress.
Buchmann, T. and Westfechtel, B. (2013). Towards in-
cremental round-trip engineering using model trans-
formations. In Demirors, O. and Turetken, O., edi-
tors, Proceedings of the 39th Euromicro Conference
on Software Engineering and Advanced Applications
(SEAA 2013), pages 130–133. IEEE Conference Pub-
lishing Service.
Czarnecki, K., Foster, J. N., Hu, Z., L
¨
ammel, R., Sch
¨
urr, A.,
and Terwilliger, J. F. (2009). Bidirectional transforma-
tions: A cross-discipline perspective. In Paige, R. F.,
editor, Proceedings of the Second International Con-
ference on Theory and Practice of Model Transforma-
tions (ICMT 2009), volume 5563 of Lecture Notes in
Computer Science, pages 260–283, Zurich, Switzer-
land. Springer-Verlag.
Czarnecki, K. and Helsen, S. (2006). Feature-based sur-
vey of model transformation approaches. IBM Sys-
tems Journal, 45(3):621–645.
de Lara, J. and Guerra, E. (2009). Formal support for QVT-
Relations with coloured petri nets. In Sch
¨
urr, A. and
Selic, B., editors, Proceedings of the 12th Interna-
tional Conference on Model Driven Engineering and
Systems (MODELS 2009), volume 5795 of Lecture
Notes in Computer Science, pages 256–270, Denver,
CO. Springer-Verlag.
Guerra, E. and de Lara, J. (2012). An algebraic semantics
for QVT-Relations check-only transformations. Fun-
damentae Informaticae, 114(1):73–101.
Jakumeit, E., Buchwald, S., Wagelaar, D., Dan, L.,
Heged
¨
us, A., Herrmannsd
¨
orfer, M., Horn, T., Kalnina,
E., Krause, C., Lano, K., Lepper, M., Rensink, A.,
Rose, L., W
¨
atzold, S., and Mazanek, S. (2014). A sur-
vey and comparison of transformation tools based on
the transformation tool contest. Science of Computer
Programming, 85A:41–99.
Jouault, F., Allilaire, F., B
´
ezivin, J., and Kurtev, I. (2008).
ATL: A model transformation tool. Science of Com-
puter Programming, 72(1–2):31–39.
Jungnickel, D. (2008). Graphs, Networks and Algorithms,
volume 5 of Algorithms and Computation in Mathe-
matics. Springer, Berlin, Germany, 3rd edition.
Kerzner, H. (1998). Project Management: A Systems
Approach to Planning, Scheduling, and Controlling.
John Wiley & Sons, New York, NY, 6th edition.
Kindler, E. and Wagner, R. (2007). Triple graph grammars:
Concepts, extensions, implementations, and applica-
tion scenarios. Technical Report tr-ri-07-284, Univer-
sity of Paderborn, Paderborn, Germany.
K
¨
onigs, A. and Sch
¨
urr, A. (2006). Tool integration with
triple graph grammars - a survey. In Heckel, R., ed-
itor, Proceedings of the School of SegraVis Research
Training Network on Foundations of Visual Modelling
Techniques (FoVMT 2004), volume 148 of Electronic
Notes in Theoretical Computer Science, pages 113–
150, Dagstuhl, Germany. Elsevier Science.
K
¨
uhne, T. (2006). Matters of (meta-)modeling. Software
and Systems Modeling, 5(4):369–385.
Object Management Group (2012). Object Constraint Lan-
guage Version 2.3.1. Needham, MA, formal/2012-01-
01 edition.
Object Management Group (2013). OMG Meta Object Fa-
cility (MOF) Core Specification Version 2.4.1. Need-
ham, MA, formal/2013-06-01 edition.
Object Management Group (2014). Meta Object Facility
(MOF) 2.0 Query/View/Transformation Specification
Version 1.2 Beta. Needham, MA, ptc-2014-03-38 edi-
tion.
Reddy, S., Venkatesh, R., and Zahid, A. (2006). A rela-
tional approach to model transformation using QVT
Relations. Technical report, Tata Research Develop-
ment and Design Centre, Pune, India.
Schmidt, D. C. (2006). Guest editor’s introduction: Model-
driven engineering. IEEE Computer, 39(2):25–31.
Sch
¨
urr, A. (1995). Specification of graph translators with
triple graph grammars. In Proceedings of the 20th In-
ternational Workshop on Graph-Theoretic Concepts
in Computer Science (WG 1994), volume 903 of
Lecture Notes in Computer Science, pages 151–163,
Herrsching, Germany. Springer-Verlag.
Sch
¨
urr, A. and Klar, F. (2008). 15 years of triple graph
grammars – research challenges, new contributions,
open problems. In Ehrig, H., Heckel, R., Rozen-
berg, G., and Taentzer, G., editors, Graph Transfor-
mations: 4th International Conference (ICGT 2008),
volume 5214 of Lecture Notes in Computer Science,
pages 411–425, Leicester, UK. Springer-Verlag.
Schwichtenberg, S., Gerth, C., Huma, Z., and Engels, G.
(2014). Normalizing heterogeneous service descrip-
tion models with generated QVT transformations. In
Cabot, J. and Rubin, J., editors, Proceedings of the
10th European Conference on Modelling Foundations
and Applications (ECMFA 2014), volume 8569 of
Lecture Notes in Computer Science, pages 180–195,
York, UK. Springer-Verlag.
Steinberg, D., Budinsky, F., Paternostro, M., and Merks,
E. (2009). EMF Eclipse Modeling Framework. The
Eclipse Series. Addison-Wesley, Upper Saddle River,
NJ, 2nd edition.
Stevens, P. (2010). Bidirectional model transformations in
QVT: Semantic issues and open questions. Software
and Systems Modeling, 9(1):7–20.
Stevens, P. (2013). A simple game-theoretic approach to
checkonly QVT Relations. Software and Systems
Modeling, 12(1):175–199.
Westfechtel, B. (2015). Bidirectional transformations in
QVT Relations: Potentials and limitations. Journal
of Object Technology. Submitted for publication.
ACaseStudyforEvaluatingBidirectionalTransformationsinQVTRelations
155
