
Toward a Model of Computation for Time-constrained Applications on
Manycores
Stephane Louise
CEA, LIST, PC172, 91191 Gif-sur-Yvette, France
Keywords:
Model of Computation, Embedded Manycore Systems, Time-critical Systems.
Abstract:
As computing systems are transitioning from multicores to manycores with the increasing number of comput-
ing resources available on modern chips, we can notice a lack of a universal programming model for these
new platforms and the challenges they convey. Ideally speaking, a program should be written only once, and
making it run on a given target would be the role of the compilation tools. But before addressing this problem,
we need a good Model of Computation (MoC) as a base for both programming and compilation tools. In
this paper we propose to share our insights on the properties such a MoC should possess. It would take the
CycloStatic DataFlow (CSDF) MoC for its good properties, and extend it to overcome its limitations while
retaining its good properties.
1 INTRODUCTION
Nowadays, the limits on power usage and dissipation
for single-chips is encouraging a trend toward more
parallelism in both HPC and embedded systems. This
is why off-the-shelf processors went from single-core
in the 1990s to the generalization of the multi-core
at the beginning of the 2010s. The extended trend
shows the happenstance of so-called manycore sys-
tems which are already available from several vendors
(e.g. Tilera Tile-64, Intel Xeon-phi, Kalray MPPA-
256, etc.). What distinguishes a manycore from a
multicore is not only the sheer number of cores but
also the communication means between the cores. For
a multicore system, the communication medium is ei-
ther a single bus or an evolution of a single-bus, but
for a manycore system, the communication is han-
dled through a Network on Chip (NoC) because ap-
proaches based on single buses are no longer sustain-
able. Another trends is the growing concern about
addressing power management issues more dynam-
ically and especially in embedded applications (e.g.
cell phones), the perceived value is often tied to very
specific tasks like decoding high profile video file
(e.g. H265) or doing elaborate image processing.
This phenomenon is generally known as Gustafson’s
Law (Gustafson, 1988).
So what problems are looming ahead for program-
mers of future embedded applications? First, paral-
lelism is difficult and automatic parallelization has its
limits with the compilation tools of the foreseeable fu-
ture. Second, lots of the current issues like the mem-
ory wall will remain and become even more so ac-
curate. Third, as architectures become more compli-
cated managing time constraints in applications be-
comes also more and more challenging.
Ideally speaking a programmer would like to write
universal code: write once, run anywhere. This goal
was arguably reached for single process applications
with a C-compiler (or other usual programming lan-
guage), because C exposes a good generic abstraction
of the model of computation of a general purpose pro-
cessor. This is what is currently lacking for manycore
systems. But before heading for compilers, we need
to find a sound generic base for a Model of Compila-
tion (MoC), as MoCs provide an abstraction for both
programming languages and Intermediate Represen-
tations (IR) in a compilation toolchain.
In this paper we will focus on discussing the gen-
eral directions where a first answer to the problem of
a good generic Model of Computation (MoC) for em-
bedded manycores should be found. Section 2 is a
quick overview of the state of the art and section 3
provides a discussion on the properties a good MoC
should encompass, including timeliness, liveliness,
safety and dependability. In the context of this pa-
per, we will focus mostly on embedded devices, but
some of the encountered issues are becoming more
and more accurate in traditional HPC systems.
45
Louise S..
Toward a Model of Computation for Time-constrained Applications on Manycores.
DOI: 10.5220/0005467900450050
In Proceedings of the 10th International Conference on Evaluation of Novel Approaches to Software Engineering (ENASE-2015), pages 45-50
ISBN: 978-989-758-100-7
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

2 MODELS OF COMPUTATIONS
2.1 Programming with Manycores
Doubling the number of processing units every two
years or so yields an exponential growth of the avail-
able processing power. As a consequence, to effi-
ciently exploit this amazing processing power, there
is a need of an exponential growth of the expressed
parallelism of target applications. Usual program-
ming paradigms do not scale well as was noticed sev-
eral years ago by Edward Lee (Lee, 2006): They
lack determinism and human manageability, even for
a limited number of threads. For thousands or mil-
lions of threads, unless the application is simple (typ-
ically SPMD
1
or at least highly homogeneous) like in
computational science and parts of HPC programing,
there is no way to resolve a faulty behavior
2
.
Another issue is the overwhelming amount of data
required to feed this huge source of computing power:
Throughputs of memory buses hardly progress with
regards to computing power (the so-called memory
wall), and single buses are already being phased out
for workstations. Networks on Chip (NoCs) scale a
bit better but their throughput growth is hardly better
than linear for mesh networks. The obvious conclu-
sion is two-folds: First, usual programming models
will not scale up well; second, the future is NUMA
3
,
with local memory serving a primordial role to limit
accesses to off-chip memory, and avoid NoC con-
tentions. This can work for the same reason cache
memories work, i.e. processing often use data ele-
ments that are either “recently” used or produced, or
“close to” recently used or produced data elements.
This is a reason why usual approaches from
HPC, especially OpenMP does not work for time-
constrained embedded manycores. Shared data con-
sistency is one of the most expensive feature of a mul-
ticore system, in terms of power budget and timing
uncertainties. Hence, it makes sense to ponder if it
is mandatory in a MoC fitted to manycores. Archi-
tecturally speaking some voices claim that cache and
memory coherence concepts will not scale well with
manycores (Choi et al., 2011). From the HPC world,
there is a movement toward using message passing
(e.g. MPI) to comply with this hypothesis. In the em-
bedded world, this idea gave birth to a renewed inter-
est in dataflow concepts and especially Kahn Process
Networks or KPN (Kahn, 1974) and its derivatives.
For example this is the case with StreamIt (Ama-
1
Single Program Multiple Data
2
i.e. with deadlocks or livelocks or race conditions, etc.
3
Non Uniform Memory Access.
rasinghe et al., 2005), Brook (Buck, 2004) and ΣC
(“sigma-C”) (Aubry et al., 2013).
So, instead of letting a programmer use data co-
herence and hope for the better, it would be prefer-
able to make programmers utilize a MoC that makes
all data usage, reuse and routing explicit for any com-
putation. Moreover, the MoC that drives the pro-
posed programming language should offer properties
that simplify the correctness by design of the paral-
lelism, and offer an easy debugging as well as auto-
matic compile-time verifications to help with the pro-
gramming process.
2.2 Stream Programming and Dataflow
On the front of dataflow paradigms, CUDA (NVIDIA
Corp., 2007) and OpenCL (Khronos OpenCl Work-
ing Group, 2008) are two ongoing industrial efforts to
bring data-driven principles to ordinary (C-like) lan-
guages. They are quite well fitted to heterogeneous
computing, but in their current form, remain focused
on GPGPU-like models of computation and are still
too close to the hardware, i.e. lacking generality.
The concept of stream programming made a
comeback because the underlying MoC offers a path
toward an easy and manageable way to express
and describe massive parallelism for the program-
mer. It also renders obvious the data-path and data-
dependency all along the processing chain, both to the
programmer and to a compiler. Therefore compila-
tion tools for stream programs take an important role:
It can place and route processes and data paths, and
automatically discard data that are no longer relevant
at a given point of processing. Stream programing
can offer a deterministic execution model that permits
to discriminate between sane parallel programs and
unmanageable ones at compile-time. It also offers a
manageable memory and data placement with regards
to the compilers.
Figure 1: A simple CSDF for MP3 decoding. q is the rep-
etition vectors that exists for well formed applications and
provides the base of scheduling.
The bases of stream programing rely on Kahn
Process Networks (KPN), more precisely on their
derivations, such as Cyclo-Static Data Flows –CSDF,
ENASE2015-10thInternationalConferenceonEvaluationofNovelSoftwareApproachestoSoftwareEngineering
46

(G. Bilsen and Peperstraete, 1996). Applications are
defined as directed graphs whose nodes are processes
and edges are communication channels. It can be
seen as a formalization of the old-styled “processes
and pipes” Unix-like way of parallel programming:
Any process can possess one or several channels as in-
puts or as outputs. Input channels are read-only, out-
put channels are write-mostly and data productions
and consumptions are modelized as atomic token pro-
ductions and consumptions, respectfully. Channels
are the only communication means between processes
and reading is blocking if an insufficient number of
tokens is present on any input channel of a process.
In that case, the execution of the process is stalled un-
til the condition changes. SDF (Static DataFlow) and
CSDF are special cases of KPN: For SDF graphs, all
the processes have fixed consumption and production
rates; For CSDF graphs, all the processes’ produc-
tion and consumption rates must obey to a fixed cycle
(the length of the cycle can differ between processes,
and the production and consumption can change from
one step of the cycle to the other but not from one
cycle to another). KPN and CSDF are locally deter-
ministic for their execution and the possibility to run
a CSDF in bounded memory and without deadlocks
is a decidable problem (Buck and Lee, 1993b). This
means well-formed CSDF applications can be stati-
cally determined and they are globally deterministic
in that case. A simple example of a CSDF application
is show in Figure 1.
2.3 Modern CSDF based MoCs
SDF and CSDF are very simple, and in fact too sim-
plistic to be generic MoCs without adding further se-
mantic. Nonetheless, it is highly desirable to keep the
CSDF equivalency in a dataflow MoC because of the
good properties, as seen previously. Languages like
Brook and StreamIt brought two interesting features
to these MoCs:
• The capability to read on a given input channel
a fixed maximum number of data tokens without
consuming them. This allows for a simple imple-
mentation of sliding windows on signals and im-
ages which is a classic way to do signal and image
processing,
• Some specific predefined generic processes do not
perform transformations on data but only reorder
the stream of data. The usually defined transfor-
mations include:
Splitters are CSDF processes with 1 input and n out-
puts, and one integer t
i
∈ N per output. Each
time a data token of order l is received on the in-
put channel, then the data token is put on output
channel k such that
∑
k
i=0
t
i
≤ l mod (
∑
n−1
i=0
t
i
) <
∑
k+1
i=0
t
i
. The usual case is when t
i
= 1, ∀i, so the
first received token is put on channel 0, the second
on channel 1, etc. in a round-robin fashion. This
is a usual way to define a Single Program Multiple
Data (SPMD) type of parallelism (see Figure 4).
Joiners are the symmetric processes, with n inputs
and 1 output. The process waits for t
i
tokens on
its input line i and outputs the tokens on its output
channel, then switches to wait for t
i+1
tokens on
channel i + 1, and so on in a round-robin fashion.
This is useful to close a set of parallel treatments,
either SPMD initiated by a splitter or a SDMP ini-
tiated by a duplicater.
Duplicaters are simple SDF processes used for copy.
They have 1 input line and n output lines. Each
time a data token is read on the input line, it is
copied on every one of the n output channels. It
is useful to implement Multiple Programs Single
Data (MPSD) type of parallelism.
Sources and Sink. Sources are processes without in-
puts, and Sinks are processes without outputs.
Data distribution processes can be utilized to create
any repetitive series of data of a given data-set, as
demonstrated in several research works, and if the
compiler is aware of the semantic of these processes,
it can optimize them to the specificities of both the
application and the underlying hardware system on
which the application will run (de Oliveira Castro
et al., 2010).
One way to extend the semantic of CSDF is to pro-
vide data distribution processes which may be outside
the scope of SDF or CSDF but which ensure at least
a CSDF equivalency when they are combined in valid
constructs.
By their nature, stream programming languages
offer most of the desired properties for large-scale
parallel applications:
• KPN and CSDF provide a clear path of data-
flow because channels are the only communica-
tion means. Hence, it does not depend on a
low-level implementation or the hardware details.
These details are a compiler issue, not a program-
mer one, so portability can be achieved this way.
• Execution determinism is achieved naturally for a
subset of KPN, especially CSDF.
• By construction, explicit locks are absent from
KPN and CSDF since the execution of tasks is
only constrained by data movements,
• The presence of synchronization points in the ex-
ecution is also obvious when data path converge
toward a few processes.
TowardaModelofComputationforTime-constrainedApplicationsonManycores
47

Figure 2: The base for scheduling the application of Figure 1 with the repetition vector.
• It allows for a natural hierarchical design, as seen
in languages like StreamIt or ΣC.
CSDF is a good choice as a base, because it is
the most elaborate MoC currently known that pre-
serves the decidability of deadlock freeness and pos-
sibility to check properties statically at compilation
time (G. Bilsen and Peperstraete, 1996; Stuijk, 2007).
But although it provides a sane programing base,
it lacks the versatility required for the relevant ap-
plications of the future of embedded computing.
Such applications like ADAS and autonomous vehi-
cles (Campbell et al., 2010; Guizzo, 2011), or aug-
mented reality –see e.g. (Sato et al., 1998; Feiner
et al., 1997; Murillo et al., 2012)– require at the same
time a large amount of processing power, a sensitivity
to current context (e.g. dynamic reconfiguration), and
real-time constraints. But what CSDF lacks the most
to this end is the ability to cope with real-time con-
straints and uncertainties in data paths. This is what
we want to discuss in the next section.
3 MoCs FOR THE FUTURE
3.1 Time Constraints
The methods for real-time design of applications is
usually focused on the concept of tasks. Then, time
constraints are given to the set of tasks, and can be
applied to any execution step of any task in the set.
Lot of real-time systems are reactive, so timing con-
straints are imposed between the time at which a given
event occurs and the end of the execution of a given
task. These systems are sometime called “Event Trig-
gered”. Others are strictly driven by time ticks that
provide the rhythm of execution of the application,
and allow the system to meet its deadlines. The lat-
ter case is called “Time Triggered” and yields either a
periodic or a pseudo-periodic behavior.
To modelize reactive systems, we can utilize ei-
ther actual real-time tasks or the hierarchical nature
of DataFlow concepts to map the behavior of tasks.
As the definition of KPN can be done in a hierarchi-
cal way, the time constraints in tasks are reported to
some of the input and output communication chan-
nels of the CSDF graph associated with the RT task.
This can be translated as a set of time constraints
on execution and communication times that comple-
ments the constraints of a well-formed CSDF appli-
cation. This way, time constraints can be inserted
in SDF and CSDF as long as individual process ex-
ecution times and communication times between pro-
cesses are boundable, and the constraints are trans-
lated as sets of inequalities. For periodic tasks we
can constrain some channels to have a periodical be-
havior also, based on the so-called “repetition vec-
tors” of CSDF (the existence of CSDF is ensured for
well-formed applications, as seen in Figure 2). Af-
ter that we can obtain the activation period of the
processes connected to the periodic communication
channels with periodic activation which have mini-
mal impact on latency and throughput. One possi-
ble model for this and its experimental evaluation was
presented in (Dkhil et al., 2015).
3.2 Dynamicity and Determinism
Liveliness and Timeliness are two important proper-
ties of real-time systems. Liveliness in a well-formed
CSDF is ensured as long as no source (I/O) and no
communication channel is faulty. Correct scheduling
policies as mentioned in section 3.1 help, but for criti-
cal systems this is not enough as they must work even
in the case of faulty behavior of any part, including
communication. So future MoCs should cope well
with this situation. This is not the case of CSDF with-
out adding further semantics (e.g. watchdogs within
processes). So even without considering dynamic ap-
plications, CSDF must evolve to become more reli-
able.
Any part that may be considered as fragile for the
behavior of the application must come with a safety
policy to insure a good behavior. Several techniques
exists for that: We already mentioned watchdogs, but
redundancy is also a key to a dependable system.
For the future, more dynamicity and versatility
than with usual CSDF would be required to per-
mit a simpler expression of context-dependent or
open and reconfigurable systems (IoT, ADAS, Cap-
tor Networks. . . ). However, even one of the sim-
plest dynamic enhancement of SDF which is Bolean
ENASE2015-10thInternationalConferenceonEvaluationofNovelSoftwareApproachestoSoftwareEngineering
48
DataFlow or BDF (Buck and Lee, 1993a) do not pro-
vide decidable behavior in the general case. So noth-
ing can be said e.g. about the absence of deadlocks.
This is why keeping the CSDF equivalency as much
as possible is so important.
Work in (Louise et al., 2014) shows how to uti-
lize the concept of transaction to extent the expres-
siveness of CSDF while retaining its properties. As
seen in Figure 3, this extension permits to manage re-
dundancy, but also other important aspects of paral-
lel and real-time systems like fault detection, deadline
enforcement, speculation. . .
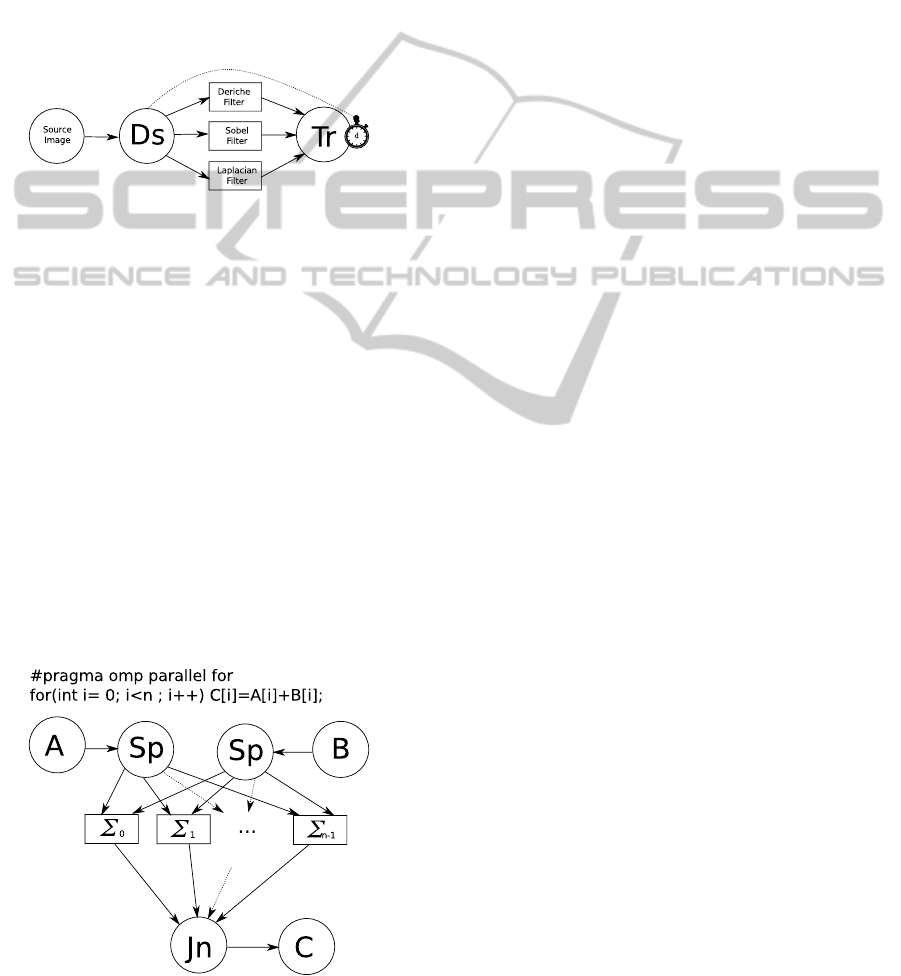
Figure 3: Edge detection in an image using redundant algo-
rithms. Image is fed to 3 processing pipelines using differ-
ent algorithms through a Duplicator. The result is chosen
after a delay d by a Transaction.
3.3 Parallelism and Fine Granularity
The finer available parallelism is usually Instruction
Level Parallelism (ILP) which is typically handled by
(e.g.) a C-compiler to achieve the best performance
on a given core of the system. But we can find some
space in term of granularity of parallelism between
dataflow and ILP. Even if it is theoretically possible,
no programmer would want to specify all the avail-
able parallelism in term of DataFlow, because at the
finer levels it becomes counter-productive and boring
to specify parallelism this way. The Forall or parallel
for type of parallelism as seen in e.g. OpenMP is a
very compact way to define parallelism.
Figure 4: Simple parallel-for loop and its equivalent in
CSDF (Sp are splitters and Jn are joiners).
With an evolution of a CSDF MoC as a base
for Intermediate Representation, we can use the
equivalency between Parallel-For constructs (with-
out border effects) and simple CSDF Splitters/Joiners
constructs, as seen in Figure 4, to automati-
cally generate fine levels of parallelism. For
more complex case e.g. parallel loops with bor-
der effects or other more elaborate OpenMP con-
structs we can imagine finding equivalent constructs
in Split/Duplicate/Transaction/Join combinations, at
least for a subset of usual kernel constructs (Herlihy
and Moss, 1993).
3.4 Dependability
Dependability will be a growing concern for upcom-
ing years. First, because more systems will be con-
nected and recent trends in software security, safety
and concerns about privacy will bring these themes at
the foreground.
Good practices in system design and development
with the help of quality assurance as seen in critical
systems (e.g. DO178 for airplanes) can reduce the
problem and minimize the impact on the users, but it
requires a huge change in attitude toward designing
and programming for mass-market devices. Safety
and security can not be well designed and managed
without impacts on performance, nonetheless, most of
these impacts can often be localized in the tiny parts
of the application which handle the interface with the
outside world.
Regarding these points, CSDF based MoCs with
the addition of watchdogs and transactions can han-
dle parts of the safety design. Other aspects must
be handled by the compilation tools and runtime sup-
port, by providing segmentation, isolation, and self-
monitoring the results and the execution. Safety and
security always rely in part on the programmer, but
good tools can help a lot.
4 CONCLUSION AND
OUTLOOKS
In this paper we try and describe the requirements
for the future of Models of Computations (MoCs)
for manycore systems. We argued CSDF provides a
sweet spot as a base for such a MoC, but it lacks dy-
namicity, dependability, and time-management sup-
port. We showed some important directions of work
in our opinion to cope well with these requirements.
These aspects can also facilitate the problems of
safety and security that arise in connected systems.
TowardaModelofComputationforTime-constrainedApplicationsonManycores
49

Of course deciding on a MoC does not mean the
MoC should be transposed verbatim in a program-
ming language. After all, even if assembly has no
notion of functions or objects, lots of programming
languages offer these concepts. But being a good
MoC means a programming language can be com-
piled so that to conform to the implementation of the
MoC in a Model of Execution on a given system. A
good MoC should scale well from the fine granular-
ities as parallel-for up to the real-time tasks. Using
such a MoC would be a good step toward a “univer-
sal” Intermediate Representation for compiling tools
of manycore systems, as it does not require locks or
most of the hardware features that render timing so
difficult in modern multicore and manycore systems.
The next step will be to verify all the required
mathematical properties of the proposed MoC and
build a generic Intermediate Representation upon it
and then programming tools. Other works will be
aimed at taking heterogeneous systems into account.
REFERENCES
Amarasinghe, S., Gordon, M. I., Karczmarek, M., Lin,
J., Maze, D., Rabbah, R. M., and Thies, W. (2005).
Language and compiler design for streaming applica-
tions. International Journal of Parallel Programming,
33(2/3):261–278.
Aubry, P., Beaucamps, P.-E., Blanc, F., Bodin, B., Car-
pov, S., Cudennec, L., David, V., Dore, P., Dubrulle,
P., de Dinechin, B. D., Galea, F., Goubier, T., Har-
rand, M., Jones, S., Lesage, J.-D., Louise, S., Chaise-
martin, N. M., Nguyen, T. H., Raynaud, X., and
Sirdey, R. (2013). Extended cyclostatic dataflow
program compilation and execution for an integrated
manycore processor. In Alexandrov, V. N., Lees, M.,
Krzhizhanovskaya, V. V., Dongarra, J., and Sloot, P.
M. A., editors, ICCS, volume 18 of Procedia Com-
puter Science, pages 1624–1633. Elsevier.
Buck, I. (2004). Brook specification v.0.2. Technical report,
Stanford University.
Buck, J. and Lee, E. (1993a). Scheduling dynamic dataflow
graphs with bounded memory using the token flow
model. In Acoustics, Speech, and Signal Processing,
1993. ICASSP-93., 1993 IEEE International Confer-
ence on, volume 1, pages 429–432 vol.1.
Buck, J. T. and Lee, E. A. (1993b). Scheduling dynamic
dataflow graphs with bounded memory using the to-
ken flow model. Technical report.
Campbell, M., Egerstedt, M., How, J. P., and Murray,
R. M. (2010). Autonomous driving in urban envi-
ronments: approaches, lessons and challenges. Philo-
sophical Transactions of the Royal Society of London
A: Mathematical, Physical and Engineering Sciences,
368(1928):4649–4672.
Choi, B., Komuravelli, R., Sung, H., Smolinski, R., Honar-
mand, N., Adve, S., Adve, V., Carter, N., and Chou,
C.-T. (2011). Denovo: Rethinking the memory hierar-
chy for disciplined parallelism. In Parallel Architec-
tures and Compilation Techniques (PACT), 2011 In-
ternational Conference on, pages 155–166.
de Oliveira Castro, P., Louise, S., and Barthou, D. (2010).
Reducing memory requirements of stream programs
by graph transformations. In High Performance Com-
puting and Simulation (HPCS), 2010 International
Conference on, pages 171 –180.
Dkhil, A., Do, X.-K., Louise, S., and Rochange, C. (2015).
A hybrid algorithm based on self-timed and periodic
scheduling for embedded streaming applications. In
Proceedings of Euromicro International Conference
on Parallel, Distributed, and Network-Based Process-
ing (EuroPDP 2015).
Feiner, S., MacIntyre, B., Hollerer, T., and Webster, A.
(1997). A touring machine: prototyping 3d mobile
augmented reality systems for exploring the urban en-
vironment. In Wearable Computers, 1997. Digest of
Papers., First International Symposium on, pages 74
–81.
G. Bilsen, M. Engels, R. L. and Peperstraete, J. A. (1996).
Cyclo-static data flow. IEEE Transactions on Signal
Processing, 44(2):397–408.
Guizzo, E. (2011). How googles self-driving car works.
IEEE Spectrum Online, October, 18.
Gustafson, J. L. (1988). Reevaluating amdahl’s law. Com-
mun. ACM, 31(5):532–533.
Herlihy, M. and Moss, J. E. B. (1993). Transactional mem-
ory: Architectural support for lock-free data struc-
tures, volume 21. ACM.
Kahn, G. (1974). The semantics of a simple language
for parallel programming. In Information processing,
pages 471–475.
Khronos OpenCl Working Group (2008). The opencl spec-
ification. Technical report.
Lee, E. A. (2006). The problem with threads. Computer,
39(5):33–42.
Louise, S., Dubrulle, P., and Goubier, T. (2014). A model
of computation for real-time applications on embed-
ded manycores. In Embedded Multicore/Manycore
SoCs (MCSoc), 2014 IEEE 8th International Sympo-
sium on, pages 333–340.
Murillo, A., Gutierrez-Gomez, D., Rituerto, A., Puig, L.,
and Guerrero, J. (2012). Wearable omnidirectional vi-
sion system for personal localization and guidance. In
Computer Vision and Pattern Recognition Workshops
(CVPRW), 2012 IEEE Computer Society Conference
on, pages 8 –14.
NVIDIA Corp. (2007). NVIDIA CUDA: Compute unified
device architecture. Technical report.
Sato, Y., Nakamoto, M., Tamaki, Y., Sasama, T., Sakita, I.,
Nakajima, Y., Monden, M., and Tamura, S. (1998).
Image guidance of breast cancer surgery using 3-d ul-
trasound images and augmented reality visualization.
Medical Imaging, IEEE Transactions on, 17(5):681 –
693.
Stuijk, S. (2007). Predictable mapping of streaming appli-
cations on multiprocessors. In Phd thesis.
ENASE2015-10thInternationalConferenceonEvaluationofNovelSoftwareApproachestoSoftwareEngineering
50
