KIKIMIMI
Voice Separation System for Automating Post Evaluation
of Learning Support System
Takahiro Nakadai
1
, Tomoki Taguchi
1
, Ryohei Egusa
2
, Miki Namatame
3
, Masanori Sugimoto
4
,
Fusako Kusunoki
5
, Etsuji Yamaguchi
2
, Shigenori Inagaki
2
,
Yoshiaki Takeda
2
and Hiroshi Mizoguchi
1
1
Department of Mechanical Engineering, Tokyo University of Science, 2641 Yamazaki, Noda-shi, Chiba-ken, Japan
2
Graduate School of Human Development and Environment, Kobe University, Hyogo, Japan
3
Tsukuba University of Technology, Ibaraki, Japan
4
Hokkaido University, Hokkaidou, Japan
5
Department of Computing, Tama Art University, Tokyo, Japan
Keywords: Kinect Sensor, Microphone Array, Signal Processing, Learning Support System.
Abstract: A learning support system with a body experience has a favorable influence on learning in children because
they obtain a sense of immersion. It is important to evaluate the learning effect of a learning support system.
However, the learning effect of the learning support system was almost evaluated manually in previous
research. The authors propose an evaluation system called “KIKIMIMI” for automating the post-evaluation
of a learning support system by reactions from the learner’s voice. In this paper, we report the validity of
KIKIMIMI as a system for automating a post-evaluation.
1 INTRODUCTION
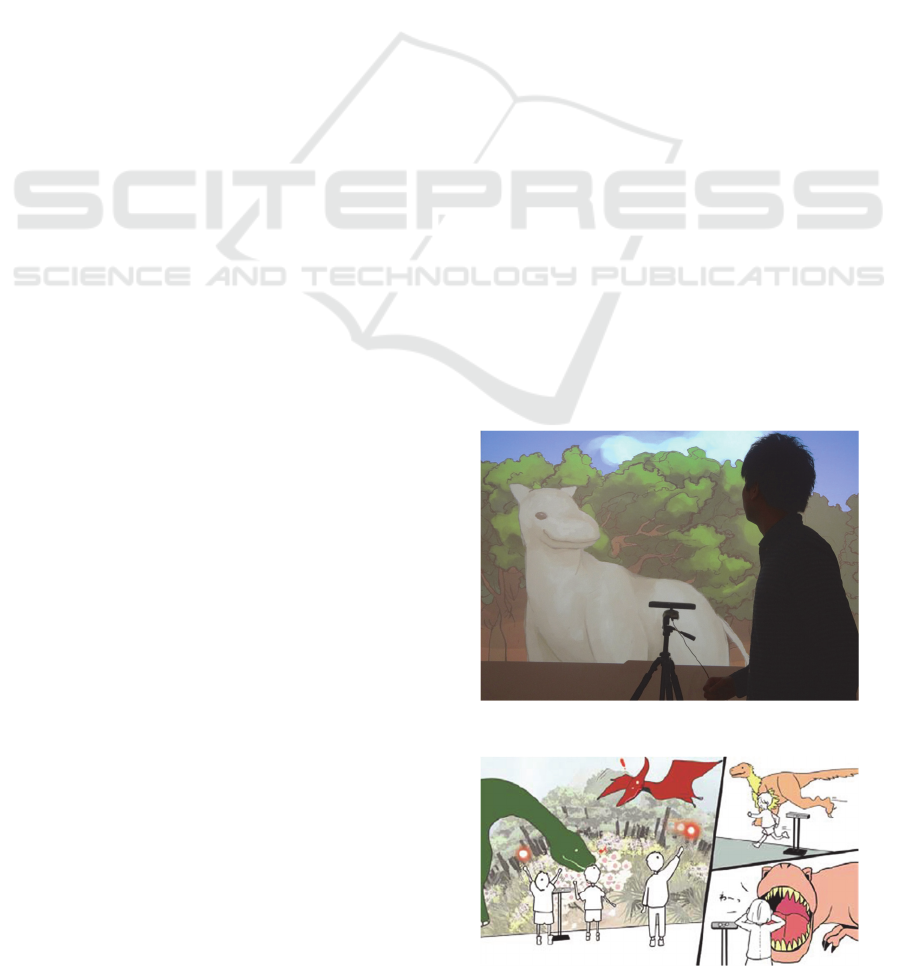
A learning support system with a body experience
has a favorable influence on learning in children
because they obtain a sense of immersion. It is also
very good for children to interact with computers.
The extinct animals learning system is the major
example (Figure 1-2) (Tomohiro Nakayama, 2014).
The extinct animals learning can only be learned
with a textbook because it is not possible to go back
in time. Therefore, a learning support system with a
body experience is effective.
However, the learning effect of the learning
support system was almost evaluated manually in
previous research using, for example, a
questionnaire, an interview, a post-evaluation by a
recording, and so on. The authors focused on a post-
evaluation using a learner’s voice recording.
The technology for automating the post-evaluation
of a learning support system by reactions from the
learner’s voice has been thoroughly researched
(Tomoki Taguchi, 2014). The technology researched
until now is shown in Figure 1. Automation of the
post-evaluation by a static learner’s voice recording
is shown in Figure 1. However, research on the
Figure 1: The extinct animals learning system.
Figure 2: Learning support system.
301
Nakadai T., Taguchi T., Egusa R., Namatame M., Sugimoto M., Kusunoki F., Yamaguchi E., Inagaki S., Takeda Y. and Mizoguchi H..
KIKIMIMI - Voice Separation System for Automating Post Evaluation of Learning Support System.
DOI: 10.5220/0005476303010306
In Proceedings of the 7th International Conference on Computer Supported Education (CSEDU-2015), pages 301-306
ISBN: 978-989-758-108-3
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

Figure 3: Flowchart of the developed technology.
evaluation by a moving learner’s voice recording is
being developed. If this research advances, all of the
learners’ voices in a spacious room can be separated
selectively. This research is very important (Figure
3).
In this research, we propose an evaluation
system called “KIKIMIMI” for automating the post-
evaluation of a learning support system by reactions
from the learner’s voice. In this paper, we describe
the details of KIKIMIMI.
2 AUTOMATING THE
POST-EVALUATION SYSTEM
2.1 Problems Associated with Wireless
Microphones
Here, we describe the methods used to record a
learner’s voice from previous research. It is
important for the field of education to perform an
evaluation by recording a voice. As a resort, learners
were recorded by a wearable microphone, e.g., a
noise-cancelling microphone and wireless
microphone (Masafumi Goseki, 2012). A wearable
microphone has some problems. It is a burden for
children to wear a heavy wireless microphone. In
addition, a distraction, psychological and physical
burdens, and an increase in tension of children are
also problems associated with the use of a wireless
microphone. A distraction is caused when children
recognize the wearable microphone. As a result,
children’s interest decreases. Psychological and
physical burdens are caused when the wearable
microphone is too heavy for children. As a result,
the children cannot act as a natural learner. An
increase in tension is caused when the learner is in
an unnatural state. Children almost never have a
wearable microphone in a general environment.
Children may be uncomfortable because they are
unnatural with the wearable microphone. Therefore,
a noncontact recording technique is needed in the
field of education. We propose KIKIMIMI to solve
these problems.
2.2 Proposed Techniques
We now describe the details of the proposed
techniques. There are many necessary techniques for
noncontact recordings, e.g., a hands-free function,
noise-canceling, and a voice-separation technique
(Takahiro Nakadai, 2014). These techniques do not
need a medium to record using a wearable
microphone. The voice-separation technique can
selectively separate to remove noise. This technique
is noncontact recording.
In this research, we utilized the voice-separation
technique because it is a noncontact recording
technique and could capture sound at an objective
angle locally. This technique is combined with a
microphone array with signal processing that can
separate children’s voices from background noise in
general living environments.
We proposed the KIKIMIMI system for
automating the post-evaluation of a learning support
system by reactions from the learner’s voice in this
research.
3 VOICE-SEPARATION SYSTEM
3.1 Separation Technique
Here, we describe the voice-separation technique
applied to KIKIMIMI. We selected the method
called delay-and-sum beamforming (DSBF) because
it is robust in real environments (Ngoc-Vinh Vu,
2010). DSBF is a method in which an objective
voice can be amplified. The method uses the time
lag of an input signal during signal processing. The
outline of this method is shown in Figure 4. The
delay times are calculated by the distance from an
objective talker to each microphone. An objective
Record by Camera or Microphone
Use Wearable Microphone
Voice Separation with Kinect Sensor
The Learner: Static
Voice Separation with Kinect Sensor
The Learner: Moving
Voice separation of All Learners in
Spacious Room
CSEDU2015-7thInternationalConferenceonComputerSupportedEducation
302
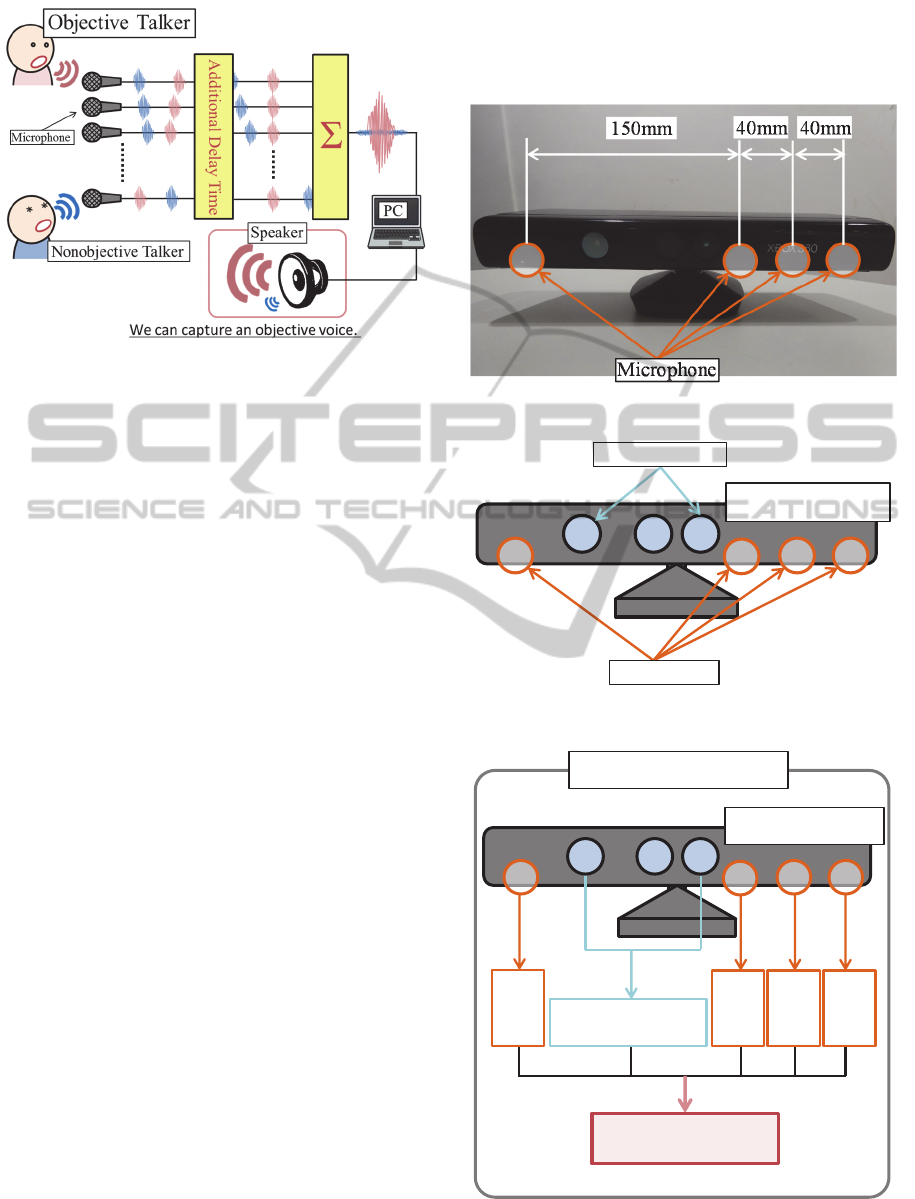
Figure 4: Schematic of the DSBF method.
voice can be amplified with an additional delay time.
This position of an objective voice is called “focus,”
which is applied for voice separation of the objective
talker.
However, the moving learner’s position is
uncertain when a moving learner is playing with the
learning support system. In order to determine their
focus, we need a way to recognize the moving
learner’s position. Therefore, we selected the Kinect
sensor by Microsoft (Riyad A. El-laithy, 2012). We
can capture a learner’s head-position information
with the recording-time information from the depth
sensor. We can continue updating to determine the
focus of the moving learner’s head position. As a
result, the voice-separation technique is able to be
applied to a moving learner. We can capture the
objective learner’s voice from the background noise.
3.2 Details of KIKIMIMI
A photograph of the Kinect sensor is shown in
Figure 5. The details of the Kinect sensor are shown
in Figure 6. The microphones in this Kinect sensor
are installed as four elements. Four microphone
elements can synchronize a recording. The depth
sensor can obtain the head-position information of a
detected person by recording the time information.
Four recording files and the head-position
information can synchronize a recording.
The details of KIKIMIMI are shown in Figure 7.
Four recording files are obtained from the four
microphone elements in the Kinect sensor. We can
capture the learner’s head-position information with
the recording-time information from the depth
sensor. We can continue updating to determine the
focus of the moving learner’s head position
combined with the head-position and recording-time
information. As a result, the voice-separation
technique is able to be applied to a moving learner.
We can capture the objective learner’s voice from
the background noise.
Figure 5: Photograph of the Kinect sensor.
Figure 6: Kinect sensor.
Figure 7: Voice-separation system.
Microphone
Depth Sensor
Kinect sensor
Head Position
Rec.
Vo i c e
#1
Rec.
Vo i c e
#2
Rec.
Vo i c e
#3
Rec.
Vo i c e
#4
Separated Voice
Kinect sensor
KIKIMIMI System
KIKIMIMI-VoiceSeparationSystemforAutomatingPostEvaluationofLearningSupportSystem
303
4 OPERATING KIKIMIMI
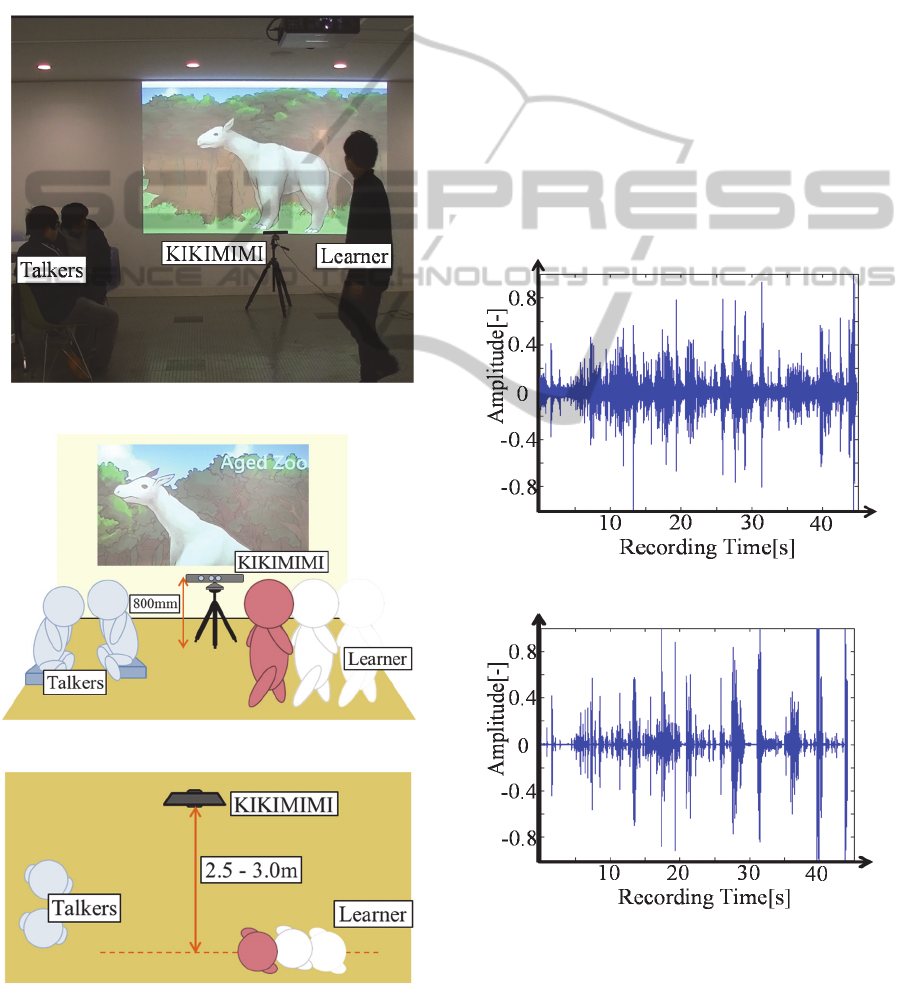
4.1 Operating Environment
Here, we describe the operating environment when
KIKIMIMI is operating, as shown in Figure 8–10.
First, KIKIMIMI was installed. Second, the learner
moved linearly in front of KIKIMIMI (2.5–3.0 m).
Finally, two people talking were placed near the
learner.
Figure 8: Operating state of KIKIMIMI.
Figure 9: Operating environment #1.
Figure 10: Operating environment #2.
Two people were talking without minding
anything. We confirmed that KIKIMIMI operated in
an environment with confusing background noise
such as environmental noise and another talking
voice.
KIKIMIMI operated using the Kinect sensor. We
can obtain four recording files. We can also obtain
the learner’s head-position information with
recording-time information from the depth sensor.
Some information obtained by KIKIMIMI was
utilized for the sound-separation technique.
4.2 Operating Results
Some results obtained by KIKIMIMI are now
presented. We compared the results before voice-
separation signal processing with those after this
signal processing. The results are shown in Figure
11–12. Figure 11 shows a waveform before voice-
separation signal processing. Figure 12 shows a
waveform after voice-separation signal processing.
Figure 11: Before signal processing.
Figure 12: After signal processing.
The vertical and horizontal axes show the voice
amplitude and recording time, respectively. Figure
11 shows are very noisy waveform. The voices of
CSEDU2015-7thInternationalConferenceonComputerSupportedEducation
304
two people talking and environmental noise are
present in Figure 11. Consequently, the learner’s
voice was not able to be heard because it was
obscured by noise. Figure 12 is clearer than Figure
11. We can recognize some of the recorded voices,
e.g., “It’s very big,” “Have a good coat of hair,”
“They live in such a forest,” “It’s cute,” and so on.
We can also recognize a nonverbal voice in some of
the recorded voices, e.g., “Oh,” “Awesome,” “What,”
and so on. As a result, we can also recognize
nonverbal voices or reactions.
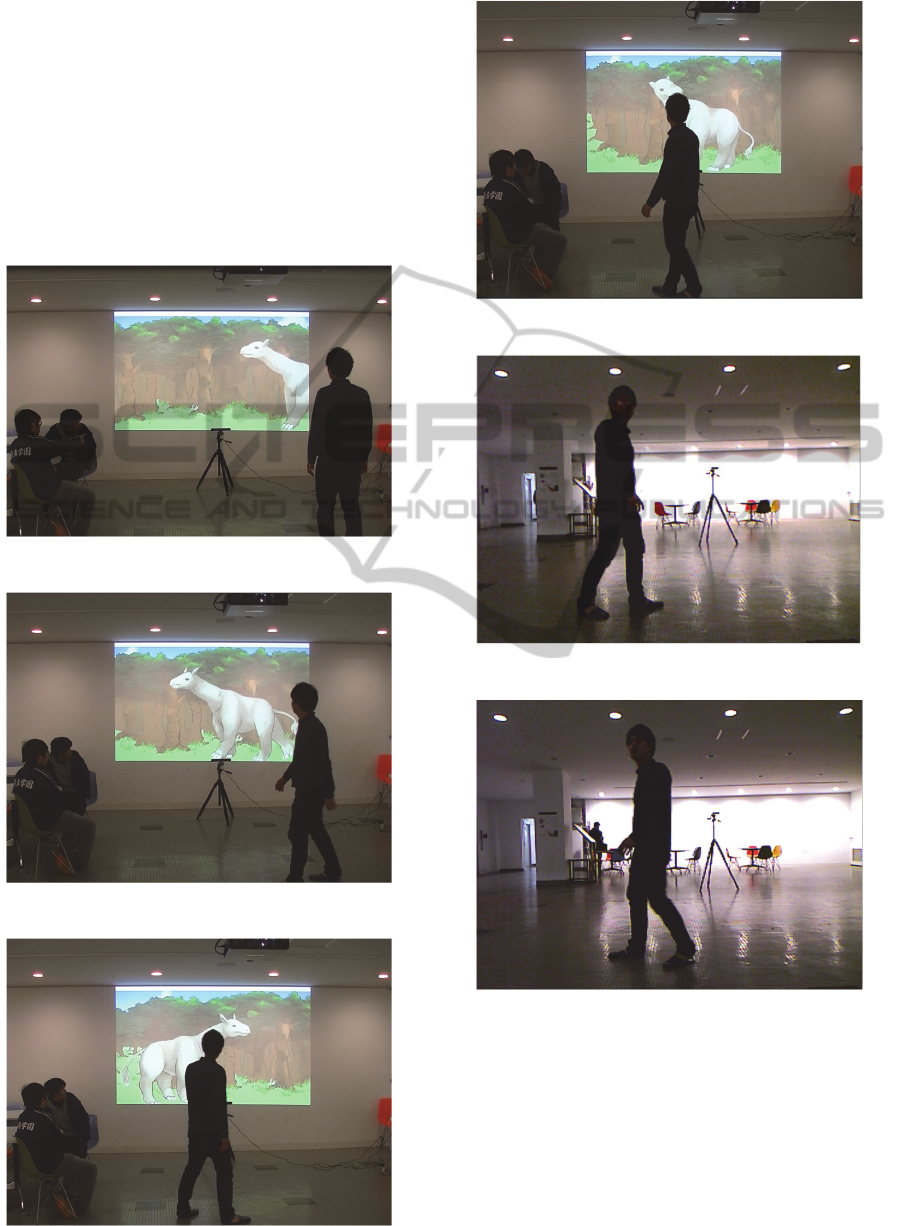
Figure 13: Operating KIKIMIMI after 10 s.
Figure 14: Operating KIKIMIMI after 20 s #1.
Figure 15: Operating KIKIMIMI after 20 s #2.
Figure 16: Operating KIKIMIMI after 30 s.
Figure 17: Perspective from Kinect sensor #1.
Figure 18: Perspective from Kinect sensor #2.
The operating states of KIKIMIMI are shown in
Figure 13–16. Figure 13 shows the operation of
KIKIMIMI after 10 s, where the learner gets used to
the learning support system. In the same way, this is
the period of time during which the two people
begin talking. In Figure 14–15, the operation of
KIKIMIMI is shown after 20 s, where the learner
moves linearly. Figure 16 shows the operation of
KIKIMIMI after 30 s, where the learner was finding
KIKIMIMI-VoiceSeparationSystemforAutomatingPostEvaluationofLearningSupportSystem
305

a characteristic of the learning support system. The
learner stopped and vocalized nonverbal voices.
As a reference, the perspectives from the Kinect
sensor are shown in Figure 17–18. From the above,
we can obtain a noncontact recording of the moving
learner’s voice when they are playing with the
learning support system. Consequently, it is
concluded that KIKIMIMI is a suitable system for
automating a post-evaluation.
5 CONCLUSIONS
In this paper, we proposed an evaluation system
called “KIKIMIMI” for automating the post-
evaluation of a learning support system by reactions
from a learner’s voice. The focus of this study was
on the post-evaluation of a learner’s voice recording.
We selected a voice-separation technique because it
could capture a noncontact recording and sound at
an objective angle locally. We could capture a
learner’s head-position information by recording the
time information from the depth sensor. We aimed
to obtain a noncontact recording of the moving
learner’s voice when they are playing with the
learning support system.
In this research, we confirmed that KIKIMIMI
operated in environment with confusing background
noise for automating a post-evaluation. As a result, it
is suggested that KIKIMIMI can possibly capture an
objective voice.
In the future, KIKIMIMI will be used as a
system for automating a post-evaluation.
ACKNOWLEDGEMENTS
This work was supported in part by Grants-in-Aid
for Scientific Research (B). I am particularly
grateful for the illustration (Figure 2) produced by
Ms. Midori Aoki.
REFERENCES
Tomohiro Nakayama, Ryuichi Yoshida, Takahiro Nakadai,
Takeki Ogitsu, Hiroshi Mizoguchi, Kaori Izuishi,
Fusako Kusunoki, Keita Muratsu, and Shigenori
Inagaki, “Immersive Observation Support System
toward Realization of 'Interactive Museum' -Observing
'Live' Extinct Animals while Walking in a Virtual
Paleontological Environment-,” Proceedings of the
11th International Conference on Advances in
Computer Entertainment Technology (ACE2014),
Poster_149(1)-(4), November 2014.
Tomoki Taguchi, Ryohei Egusa, Masanori Sugimoto,
Fusako Kusunoki, Etsuji Yamaguchi, Shigenori
Inagaki, Yoshiaki Takeda, and Hiroshi Mizoguchi,
“Developing Voice Separation System for Support
Education Research: Determining Learner Reaction
without Contact,” Journal of Convergence Information
Technology (JCIT), Vol. 9, No. 3, pp.12-17, May
2014.
Takahiro Nakadai, Tomohiro Nakayama, Tomoki
Taguchi, Ryohei Egusa, Miki Namatame, Masanori
Sugimoto, Fusako Kusunoki, Etsuji Yamaguchi,
Shigenori Inagaki, Yoshiaki Takeda, and Hiroshi
Mizoguchi, “Sound-Separation System using
Spherical Microphone Array with Three-Dimensional
Directivity-KIKIWAKE 3D: Language Game for
Children,” International Journal on Smart Sensing and
Intelligent Systems (S2IS), Vol. 7, No. 4, pp.1908-
1921, December 2014.
Masafumi Goseki, Ryohei Egusa, Takayuki Adachi,
Hiroshi Mizoguchi, Miki Namatame, Fusako
Kusunoki, Shigenori Inagaki, “Puppet Show for
Entertaining Hearing-Impaired, Together with
Normal-Hearing People—A Novel Application of
Human Sensing Technology to Inclusive Education,”
International Conference on Innovative Engineering
Systems (ICIES2012), pp.121-124, December 2012.
Nogoc-Vinh Vu, Hua Ye, J. Whittington, J. Devlin, and
M. Mason, “Small Footprint Implementation of Dual-
Microphone Delay-and-Sum Beamforming for In-Car
Speech Enhancement,” IEEE International Conference
on Acoustics, Speech, and Signal Processing, pp.1482-
1485, March 2010.
Riyad A. El-laithy, Jidong Huang, and Michael Yeh,
“Study on the Use of Microsoft Kinect for Robotics
Applications,” IEEE/ION International Conference on
Position Location and Navigation Symposium
(PLANS), pp.1280-1288, April 2012.
CSEDU2015-7thInternationalConferenceonComputerSupportedEducation
306
