
Advanced Driver Aid System for Energy Efficient Electric Bus
Operation
Teemu Halmeaho, Marko Antila, Jari Kataja, Paula Silvonen and Mikko Pihlatie
VTT Technical Research Centre of Finland Ltd, Espoo, Finland
Keywords: Electric Bus, Driver Assistance, Simulation, Energy Efficiency.
Abstract: Electric bus energy consumption is mainly due to the vehicle traction. Additionally, auxiliary systems such
as cabin heating-cooling, air compressor, and power steering consume energy. One way to optimize the
consumption is a Driver’s Aid System (DAS). Based on the route information, DAS provides the driver the
optimal driving suggestions, and simultaneously may optimise the energy use of auxiliary systems. These
approaches are discussed in the paper. When the optimal air compressor operation was introduced, vehicle
energy consumption was decreased 1.6 %. In addition to guiding the auxiliary devices and the driver,
prospects of using DAS as a communication hub for managing buses, their charging and to share
information for a bus operator are discussed.
1 INTRODUCTION
In the near future, hundreds of electric buses will be
operating in a single city by different bus operators.
A well planned system is needed to manage the re-
charging of the fleets. Even the carefully planned
system is vulnerable e.g. for issues in electricity
distribution, which could lead into situation where
charging demand exceeds the capacity. The most
promising approach for electric city bus charging
infrastructure is believed to be the opportunity
charging concept, where the high power quick
charging would take place during the bus stops and
in the bus hubs. Buses designed for this concept
have small capacity batteries to solve the issue of
higher price of the high power batteries. With these
small batteries, there is always a risk of running out
of charge leading into stoppage.
As the Public Transport Authority (PTA) is
responsible for management of the transport system
and ensuring smooth operation, it should have a
strategy also for abnormal operation situations. For
this, data from in-service buses is needed for the
charging management system to (automatically)
identify e.g. buses in most urgent need for re-
charging. Therefore, on-line data collection is
needed for every electric bus. In addition, the driver
should have an access to the required information
related to the dynamic charging plan of the bus in
hand. The driver’s assistance system can therefore
work as a central information system to guide the
driver not just about the optimal driving style, but
also inform about the charging need. The bus
operator on the other hand is interested on remote
fault diagnostics of the bus components, monitoring
the performance of the drivers in sense of energy
consumption, maintaining the speed limits and
timetable.
Although originally developed for diesel buses,
the driver’s aid device can be used for electric buses
also. The monitoring system collects the well
performed driving sections which are used for
learning the best driving profile for a specific bus
route. The driver’s assistance system will be even
further developed to include optimal operation of the
subsystems. In the normal conditions, the operation
will follow the pre-defined optimal guidance. For
abnormal conditions, the guidance should adapt and
change into corresponding mode.
The energy efficient control of subsystems can
be found either with simulations or using the same
“learning during operation” principle as the original
driver’s aid. As an example of the subsystems,
auxiliary components is chosen for the purpose. The
potential of intelligent operation in this case is
discussed in the paper.
59
Halmeaho T., Antila M., Kataja J., Silvonen P. and Pihlatie M..
Advanced Driver Aid System for Energy Efficient Electric Bus Operation.
DOI: 10.5220/0005494600590064
In Proceedings of the 1st International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS-2015), pages 59-64
ISBN: 978-989-758-109-0
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
2 FUTURE NEEDS FOR
COMMUNICATION AND DATA
SHARING WITH ELECTRIC
BUSES
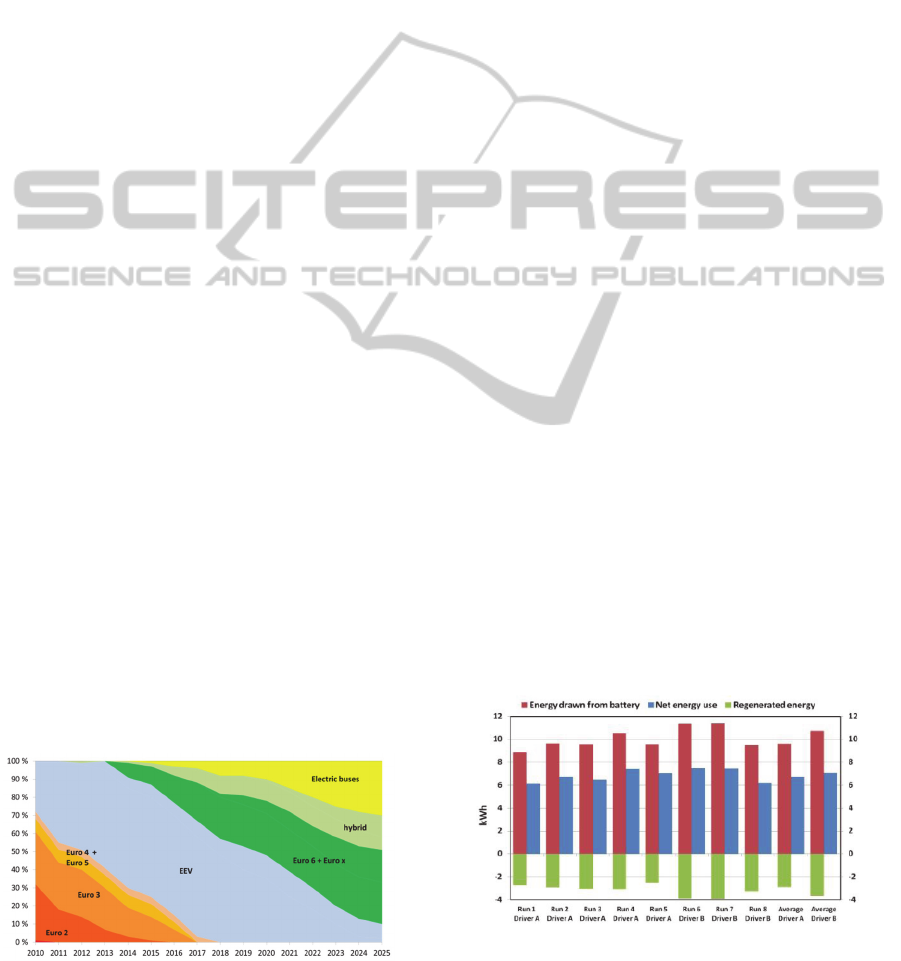
In quest of increasing the share of low-emission
buses in the Metropolitan Helsinki area, Finland, the
local PTA, Helsinki Region Transport (HSL), has
announced that they are aiming at ramping up the
share of fully electric busses to be 1 % in 2015, 10
% in 2020 and 30 % in 2025 (Figure 1), (HSL,
2014). In various other major European cities,
similar actions are taken as well.
For fully electric operation, the two main
alternatives for the charging strategy are an electric
bus with a large battery (depot charging concept)
and one with a small battery (opportunity charging
concept). The choice between these two has
significant impact on the designed infrastructure and
cost of the system. Practical issues, such as charging
standards when connecting the charger and the
vehicle physically, but also protocols for the
information exchange, are yet to be solved. The bus
operators and other stakeholders being the end users
and responsible of the costs are interested on the
total cost of ownership if diesel buses are replaced
with electric buses. As the best choice tends to be a
case-specific, careful planning is needed. However,
designing the system beforehand is extremely
difficult, and therefore some flexibility should be
available instead of hard coding the plan. The
proposed driver’s assistance system could work as a
framework for the required communication platform
enabling flexibility for the bus operation.
Currently the driver’s aid systems are focusing
on assisting the driver to survive in special situations
or to add safety functions into driving. Using
machine vision, pedestrian detection has been
studied by Geronimo (2010). For preventing lane
crossing, multi sensor approach was proposed in
(Mcall and Trivedi, 2006). To perform better in
Figure 1: Fleet strategy of Helsinki Region Transport for
ramping up the share of fully electric busses (HSL, 2014).
demanding tasks, such as parallel parking, driver’s
aid was researched (Ozkul et al., 2008, Vorobieva et
al., 2015).
For fixed schedule applications where route is
predetermined (e.g. buses) and the task is to
minimise the energy consumption, there is not much
research activity, although some general patents
exist such as (Franchineau and De Verdalle, 2008).
The closest research activity is related to active
acceleration pedal (Várhelyi et al., 2004), which is
effectively having similar target.
3 DRIVER ASSISTANCE
3.1 Optimal Driving Style for Electric
City Buses
For studying the optimal driving style for electric
city buses, measured data collected from real-world
operation on actual bus line is used. The purpose of
the study is to find out how the driving style affects
electric bus energy consumption and to compare the
identified optimal driving style with the optimal
driving style of diesel buses. The basis of the study
is the real-time driver assistant device, originally
developed for use on diesel buses.
To identify the optimal driving style, the driving
performances involving the lowest possible
consumption are sought and their speed profiles are
then analysed. The optimal driving style for electric
busses is anticipated to differ from that of diesel
buses. The main reason is the possibility for
regenerative braking and differences in efficiency
maps between an electric motor and a diesel engine.
An example of variation in energy consumption
is seen in Figure 2 where two drivers have been
driving the same fully electric city bus on Line 11 in
Espoo, Finland.
Figure 2: In-service electric energy consumption of a test
bus running on Line 11, in city of Espoo.
VEHITS2015-InternationalConferenceonVehicleTechnologyandIntelligentTransportSystems
60

3.2 Guiding towards Optimal Driving
Style
When the optimal driving style for electric bus has
been defined, the following procedure is identical to
the diesel buses’ data collection, back office
calculation and other required operations to achieve
the driver assistance system to guide the bus driver
for energy efficient driving, maintaining the speed
limits and timetable (Figure 3). With aid of driver
assistance system, it is possible to affect the driver’s
manner of driving in real-time. In a diesel city bus,
economical driving is achieved by quick
acceleration and constant speed that is as low as
possible. The system provides real-time guidance to
drivers, taking into account vehicle position
compared to scheduled position, speed limit and the
travelling comfort of passengers using
recommendations on the intensity of acceleration
and feedback on current speed and its relation to the
target speed. When determining the speed it
dynamically takes into account the timetable: if the
bus is ahead of schedule the constant speed can be
lower.
On diesel buses, saving potential of 5-10 % has
been realized when the driver assistant system has
been demonstrated and tested. The better the driver
follows guidance, the greater savings can be
achieved.
The collected data during the operation is
transferred wirelessly to a back office system
consisting of a server software and browser-based
user interface. The server software automatically
processes and analyses data recorded on the bus line.
The analysis reports can be viewed in the user
interface. The on-board terminal device manages the
measurement data collection and sending it to the
server, and also the actual display of guides for the
driver. To operate, the guidance needs route-based
instructions. For this, the necessary data, such as
timetables and speed limits, are collected from other
systems by the server software. After a learning
period, the target speeds for the bus route will be
calculated using the data that is collected during the
operation. The location information as Global
Positioning System (GPS) coordinates and vehicle
speed with energy consumption are the essential
variables for the monitoring system to compare with
timetable. Using this background data, location-
based target speed profiles will be created to each
bus line and departure. Initial target speeds for the
route can be, schedule permitting, e.g. 5% lower
than the respective speed limits. The system will
then adjust these speed instructions according to the
learned optimal driving style. The route can be
edited in the user interface, if some of the
background data cannot be collected automatically.
The route is presented to the terminal device as a list
of GPS coordinate points with their target speeds,
having information about the bus stops, speed limit
changes and other possible factors.
The most recent addition for the driving assistant
system is the functionality that enables the partial
comparison of driving performances, allowing the
analysis to focus on optimally driven stretches
between bus stops or on even shorter stretches in
order to construct optimum overall speed profiles. If
these driving stretches and corresponding partial
speed profiles are categorised to form general
results, they can be used for adaption to other bus
lines as well. Categories can be based on e.g. speed
limits, stops and slow downs (traffic lights, speed
bumps, pedestrian crossings and intersections) or
length and shape (turns and hills) of the stretch.
Figure 3: Communication between the components of the driver assistance system.
AdvancedDriverAidSystemforEnergyEfficientElectricBusOperation
61
4 AUXILIARY DEVICE ENERGY
CONSUMPTION
In diesel buses, auxiliary device energy consumption
consists of engine cooling fan, air compressor, air
conditioning, power steering and alternator to run
the 24 V devices such as lightning. For fully electric
buses, the engine cooling fan can be taken out from
the list and separate alternators are not used, but the
equivalent 24 V auxiliary device consumption does
exist. In addition, the electric buses use this low
voltage source for many low power auxiliaries e.g.
fans and pumps of powertrain component cooling
circuit. Instead of alternator, regenerative braking
energy via drive motor is used to produce also the
low voltage electricity.
As reported by Erkkilä et al. (2012), the energy
consumption of auxiliary components in diesel
powered city buses is only marginal. During summer
time, the average consumption for power steering
was under 1 % (in relation to energy available on
crankshaft). In the same study, air compressor was
consuming 2 % and air conditioning 3 %. During
winter time, the auxiliary heater was responsible for
20 % of the total energy consumption.
Albeit the relative energy consumption of the
auxiliary components is low in diesel buses, the
same amount of energy in an electric bus means
higher relative portion from the total energy
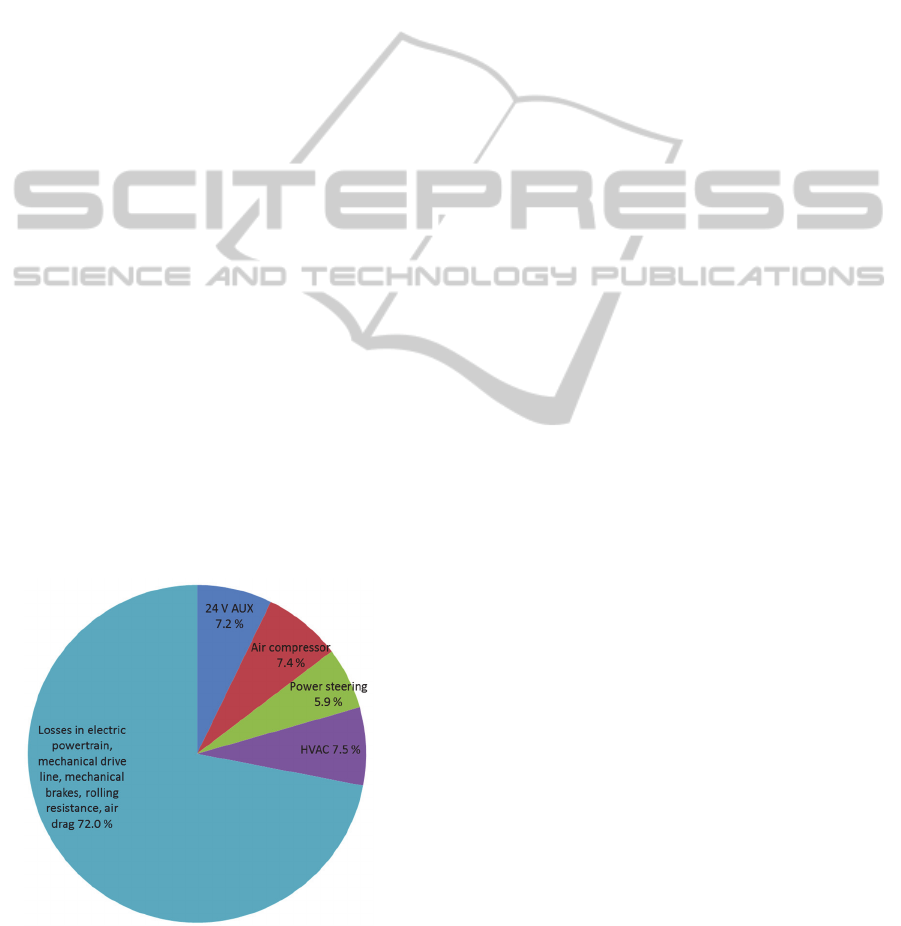
consumption. In Figure 4 can be seen a measured
example of how the auxiliary components are using
energy during operation in an actual bus line.
In this example, Heating Ventilation and Air
Conditioning (HVAC) consumption is minimal,
Figure 4: Measured share of auxiliary component energy
consumption in electric city bus during real-life operation
on Line 11 in Espoo, Finland at 15 °C ambient
temperature.
because the outside temperature was 15 °C, which
does not require much heating or cooling. Some of
the energy required by the HVAC system is seen in
the 24 V AUX consumption, as the fans of the
HVAC system (air source heat pump) is connected
there. In this particular case, the fans were
responsible for half of the 24 V AUX energy
consumption. To produce maximum heating or
cooling power, the combined energy consumed by
the fans and the actual HVAC will be at least four
times as much. During a cold winter day, even
additional heating would be needed to maintain the
cabin in desired temperature. The need can be four
times the maximum power of the air source pump,
and therefore needs to be produced with a fuel
operated heater.
5 SUBSYSTEMS’ OPTIMAL
OPERATION
The optimisation of the subsystems’ operation adds
further potential to energy savings. Even though the
driving losses due to the vehicle-traction are
responsible for a large part of the battery energy
consumption, the subsystems waste most of the
energy. The biggest driving losses in city buses are
caused by the rolling resistances of the tyres. In the
subsystems, powertrain components, such as
mechanical driveline and electric motor with an
inverter, produce losses during the operation due to
the limited efficiency in power transmission. Using
mechanical brakes for deceleration, significant
losses are generated, which can be reduced with
regenerative electric braking. Besides powertrain
components, subsystems include also the auxiliary
components. These are not mandatory for vehicle
traction, but may in some cases consume a
considerable amount of energy.
To study and optimize the power consumption of
the auxiliary subsystems a MATLAB Simulink
model was developed. The dynamics of the bus has
been modelled with Simscape (Halmeaho et al.
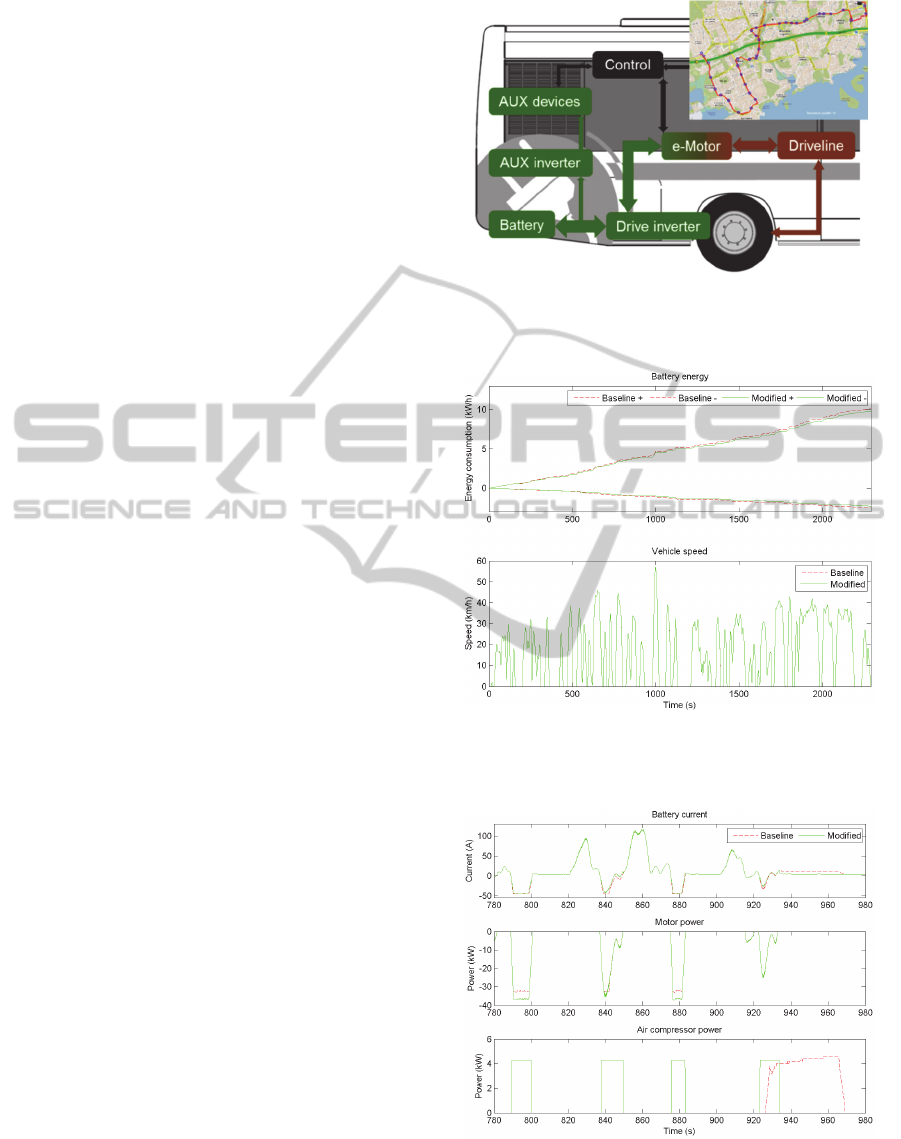
2014). Main subsystems of the model are shown in
Figure 5.
During the simulation, the bus is driven on an
actual bus route, Line 11 in Espoo, Finland, with bus
stops and other traffic, whose effect into simulation
is included via measured speed profile and auxiliary
component energy consumption. Stopping at bus
stops and traffic lights and following the road with
junctions and turnings require steering, braking and
opening the bus doors. Auxiliary device
consumption is thus dependent on the bus route and
VEHITS2015-InternationalConferenceonVehicleTechnologyandIntelligentTransportSystems
62
also on the ambient conditions which demand using
HVAC for passenger and driver comfort.
Power consumption of the auxiliary devices is
modelled using a system identification approach.
The electricity consumption of the power steering
and air compressor has been measured. Based on the
measurement data and the route of the bus, simple
mathematical models of the energy consumption of
the given auxiliary devices can be created.
The model of the power steering gives the
consumption as a function of turnings based on GPS
coordinates. The air compressor is used by brakes,
suspension and doors. Usage of brakes has been
measured and opening of doors can be estimated
based on speed and locations of the bus stops. Based
on that information, a model of the air compressor
can be created.
Potential of utilizing optimal air compressor
operation to reduce overall energy consumption was
selected for closer examination. The potential for
energy savings comes from the battery efficiency
and limited charging current. The efficiency is
usually around 96 %, hence using a battery to store
energy will not waste much energy. However, the
battery charging current limit is extremely sensitive
for the battery temperature. During the winter time,
the permitted current can decrease into at least one
third of the maximum, which will limit the
regenerative motor power. However, the
regenerative power could be increased if there was
alternative electric load available. For this purpose,
the compressor was modified to activate only at long
and hard enough decelerations, when it is normally
activated based on air consumption. The cumulative
energy consumption was equal in both strategies.
The battery charging limit was set to 45 A, which
represents the actual observed limit permitted by the
Battery Management System (BMS) in +3 °C
ambient condition.
Figures 6 and 7 compare the results of using the
modified and normal compressor activation strategy.
Figure 6 shows the used speed profile together with
the cumulative battery energies separately for
charging and discharging directions. In Figure 7 is
visible a partial stretch of the cycle, where can be
seen the differences for battery and motor operation
when baseline or modified air compressor activation
strategy is used. The energy savings are achieved
because of the higher regenerative motor power and
avoiding the unnecessary charging and recharging
losses of the battery.
The realized cumulative savings during the
whole cycle was 0.13 kWh, which means 1.6 %
decrease for the overall vehicle energy consumption.
Figure 5: Subsystems of the auxiliary device energy
consumption model. The coordinate data is included in the
model, shown in a map at the top of the figure.
Figure 6: Simulated cumulative energy consumptions and
realized speed profiles for baseline and optimal air
compressor operation during the whole cycle length.
Figure 7: Simulated battery current, motor power and air
compressor power for baseline and optimal air compressor
operation during part of the cycle length.
The total consumption of the compressor was 0.56
AdvancedDriverAidSystemforEnergyEfficientElectricBusOperation
63

kWh during the cycle. All of this potential is not
available for recovery, because the system is already
in baseline operation inherently feeding the energy
for consumers during the regenerative braking. In
addition, the timing of the compressor usage in the
baseline is often occurred during the hardest
decelerations, and on the other hand, many of the
additional compressor activation in the modified
strategy occur in low power regeneration and current
limit is not met. Although the achieved energy
saving was small on this particular case, higher
savings can be anticipated when also the power
steering and HVAC usage will be optimized. This
could include switching off the power steering pump
on straight driving sections and boosting HVAC
power when slowing down. In addition, the speed
profile of the cycle had only modest decelerations,
and therefore the battery current limit was exceeded
only few times.
6 CONCLUSIONS
Electric buses in comparison with conventional
buses have potential for increased energy efficiency,
zero tail pipe emissions and decreased noise caused
by city transport. This paper described a driver
assistant system to be used for guaranteeing optimal
driving style for electric city buses. The system will
be even further developed to include also intelligent
control of various subsystems. Optimal operation of
auxiliary components was discussed in the paper.
Auxiliary components in electric buses are
inherently controlled in more energy efficient
manner than in diesel buses. Some improvements in
efficiency using intelligent control can be still
achieved. A simulation model that is used for
studying the optimal operation of electric vehicle
subsystems was described. Simulation results when
using optimal air compressor activation was
presented. Overall energy consumption of the
vehicle was reduced 1.6 %. The savings can be
further increased when other auxiliaries are also
considered for optimization.
Based on the bus route information, the proposed
advanced driver’s aid system could combine the
driver guidance and the optimal use of auxiliary
components to achieve more energy efficient electric
city bus driving. In the future, it could include also
communication interface for bus fleet management.
ACKNOWLEDGEMENTS
The authors acknowledge the financial support for
the research work that received from the Electric
Vehicle Systems (EVE) programme funded by
Tekes – the Finnish Funding Agency for Innovation.
REFERENCES
Erkkilä, K., et al. 2012. Energy efficient and intelligent
heavy vehicle – HDENIQ Final report. (pdf) Espoo,
Finland: VTT Technical Research Centre of Finland.
Available at: http://www.transeco.fi/files/783/
Energy_Efficient_And_Intelligent_Heavy_Vehicle_H
DENIQ_Final_Report_VTT-R-08344-12.pdf
(Accessed 6 February 2015).
Franchineau, J. L., De Verdalle, E., 2008. Driving
Assistance Method and Device for a Vehicle for
Travelling Along a Predetermined Path Between a
First Point and a Second Point. U.S. Pat. Application
12/601,600.
Geronimo, D., Lopez, A.M., Sappa, A.D., Graf, T., 2010.
Survey of Pedestrian Detection for Advanced Driver
Assistance Systems. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 32(7), pp.1239-
1258.
Halmeaho, T., Rahkola, P., Pippuri, J., Tammi, K., 2014.
”Hybrid City Bus Design Evaluation Using System
Level Simulations,” In Proc. ISIE 2014, 2014.DOI:
10.1109/ISIE.2014.6864866.
HSL, 2014. HSL mukana Maailman ympäristöpäivässä:
Joukkoliikenne muuttuu päästöttömäksi. (HSL News
bulletin) 5 June 2014. Available at <https:
//www.hsl.fi/uutiset/2014/hsl-mukana-maailman- ym
paristopaivassa-joukkoliikenne-muuttuu- paastottoma
ksi-4934> (Accessed 6 February 2015). (in Finnish).
McCall, J.C., Trivedi, M.M., 2006. Video-based lane
estimation and tracking for driver assistance: survey,
system, and evaluation. IEEE Transactions on
Intelligent Transportation Systems, 7(1), pp.20-37.
Ozkul, T., Mukbil, M., Al-Dafri, S., 2008. A fuzzy logic
based hierarchical driver aid for parallel parking.
In Proceedings of 7th WSEAS Int. Conf. on Artificial
Intelligence, Knowledge Engineering and Data Bases.
University of Cambridge, UK, 20-22 February 2008.
Várhelyi, A., Hjälmdahl, M., Hydén, C., Draskóczy, M.,
2004. Effects of an active accelerator pedal on driver
behaviour and traffic safety after long-term use in
urban areas. Accident Analysis & Prevention, 36(5),
pp.729-737.
Vorobieva, H., Glaser, S., Minoiu-Enache, N., Mammar,
S., 2015. Automatic Parallel Parking in Tiny Spots:
Path Planning and Control. IEEE Transactions on
Intelligent Transportation Systems, 16(1), pp.396-410.
VEHITS2015-InternationalConferenceonVehicleTechnologyandIntelligentTransportSystems
64
