
Spatial Temporal Relational Graphs on Connected Landscapes
Alan Kwok Lun Cheung
1
, David O’Sullivan
2
and Gary Brierley
1
1
School of Environment, University of Auckland, Auckland, New Zealand
2
Department of Geography, University of California, Berkeley, Berkeley, CA 94720-4740, U.S.A.
1 RESEARCH PROBLEM
The structure of computational spatial analysis has
mostly built on data lattices inherited from
cartography, where visualization of information takes
priority over analysis. In these framings, spatial
relationships cannot easily be encoded into traditional
data lattices. This hinders spatial analysis that
emphasizes how interactions among spatial entities
reflect mutual inter-relationships at a very basic level.
With this limitation, landscape compositions and
configurations can be appreciated further if a
topologically and temporally enabled data structure is
available. The aim of this research is to develop a data
structure and its associated analytical methods to
assess the connections and interactions of landscape
elements through time and space. This additional
layer of information will help us understand the
dynamics of processes happening within and between
components of landscapes.
2 OUTLINE OF OBJECTIVES
This research has the following objectives:
1) Establishing a topologically enabled data
structure using graph theory. The aim for this
portion of research is to develop a “piggy-back”
topological data structure which can be produced
from existing vector and raster dataset, thus
maximize the compatibility of the methods
developed in this research.
2) Examine landscape patterns and their dynamics in
the form of subgraphs from the data structure. The
graph data structure will be interrogated using
methods ranging from pair-wise change
monitoring (Graph Edit Distance) to more
complicated subgraph structure monitoring
(cliques, communities). The associated extraction
methods have to be adapted from currently
available mathematical graph tools.
3) Evaluate the prominence of subgraph patterns on
the landscape and explain them in the context of
geography and landscape ecology. Extraction of
subgraphs and numerical assessment of patterns
on their own might not be sufficient in explaining
patterns on the landscape. Here domain expert
knowledge will be utilized to link up concepts
from geography and landscape ecology with that
of our empirical results.
3 STATE OF THE ART
Despite the popularity and variety of spatial statistics,
its ability to appraise landscape connectivity theories
through spatial patterns has been limited. Instead they
are viewed and used as means to an end. Typical
spatial pattern analysis has been concerned primarily
with statistical distribution of individual types of
entities. In such operations, the mechanism for
describing relationships between types of entities
relies on comparison of clusters or accumulative
statistics. Patterns discovered using these procedures
provide significant insight into the composition of the
landscape, but far less about its configuration.
Processes that cause interactions and changes
between entities are not deciphered. As such,
extraction of “patterns” in this way remains relatively
superficial as description of distributions takes
priority over the possibility of identifying relational
processes. Thus accumulative statistics may not be
the most suitable framework for realizing the
conceptual idea of a connected landscape.
The concept of connected landscape comes from
landscape ecology. The term Landscape Ecology was
coined by Troll (1939) in an effort to frame enquiry
into interactions among elements and associated
processes that explain ecological patterns in
landscapes. At the early stages of its inception,
analyses were restricted to thought experiments on
conceptual models and small scale case studies due to
difficulties in the acquisition and processing of data.
With advances in computing power, renewed interest
has been evident, increasingly targeting the
implementation of concepts in a systematic manner.
The realization of concepts are restricted by the
availability of tools. Current GIS and remote sensing
represent landscape with two main types of data
3
Cheung A., O’Sullivan D. and Brierley G..
Spatial Temporal Relational Graphs on Connected Landscapes.
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
structures: a field view in raster data, and a feature
view in vector data. Both structures developed when
static visualization of spatial information took
priority. Although spatial relationships in forms of
proximity and topology are embedded in these
structures, this information is often not utilized. More
process-oriented approaches necessitate the inclusion
of spatial relationships to operate effectively
(Takeyama and Couclelis, 1997).
Despite limited attention in the earlier years of
GIS, graph theory has shown promising results for
representing structural properties of landscapes,
landscape connectivity and ecological fluxes
Gaucherel et al., (2012) used graph theory to
represent interacting patchy landscapes. Thibaud et
al., (2013) encoded time into spatial graphs to
monitor the structural movements of marine sand
dunes. Pascual-Hortel et al., (2006, p1-2) noted that
“graph structures have been shown to be a powerful
and effective way of both representing the landscape
pattern and performing complex analysis regarding
landscape connectivity”, demonstrating the viability
of landscape graphs as a data structure for more
substantive analysis. Similarly, Kupfer (2012) noted
that landscape graphs can bridge the gap between
structure and function, while also acknowledging that
calculation and interpretation of results may be
challenging.
4 METHODOLOGY
4.1 Spatial Temporal Relational Graph
We proposed to use graph theory as a basis to
construct our topologically and temporally enabled
data structure. The data structure is called Spatial
Temporal Relational Graph (STRG). The basic
structure of STRG is built upon nodes and edges,
identical to that of mathematical graphs. The nodes in
STRG represent centroids of patches in a landscape
and edges represent the neighbourhood relationships
between them. Each of the nodes represent a spatial
entity which occupy physical space in the real world,
therefore they are also encoded with geographical
location in the form of Euclidean coordinates.
Auxiliary geometric information which might assist
in analysis such as patch size, area occupied and other
intrinsic properties of the patch are also encoded. The
temporal domain is implemented as a stack of graphs
representing snapshots of times. Finally the dynamics
of nodes are tracked through time using object
tracking methods.
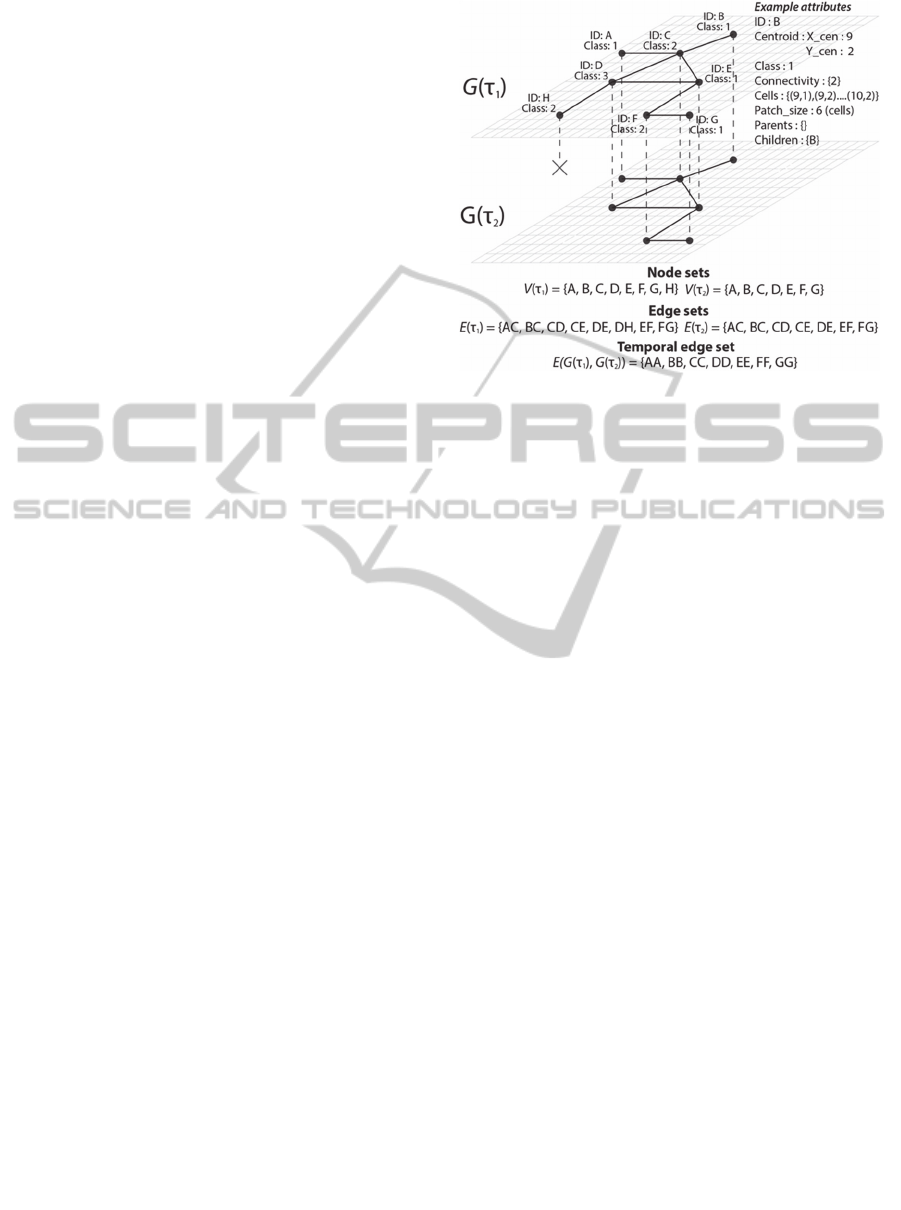
Figure 1: Structure and mathematical notation of STRG.
This graph based data structure encapsulates
spatial, temporal and relational properties in an
abstract representation of the landscape. Spatial and
temporal resolution is entirely dependent upon the
context of study and the availability of datasets. A
study on landcover change in remote regions might
require lower spatial and temporal resolution given
the limited amount of change, whereas urban
morphology monitoring requires high resolution data
for both spatial and temporal domains due to the
compactness of urban structures, and their rapid rate
of change. An advantage of this structure is that
spatial entities are linked spatially and temporally,
without any loss of information. It is also possible to
attach a variety of attributes to the nodes and edges in
a graph as needed to further characterise the
landscape. The graph form allows us to apply graph
analysis methods to interrogate landscape
relationships without much difficulty.
4.2 Graph Edit Distance
One of the most elementary form of landscape
analysis which can be performed in STRG is change
detection by Graph Edit Distance (GED). The
principle mechanism of GED is to monitor changes
on the landscape by documenting additions and
removals of nodes and edges from one snapshot to the
other. Given two distinct graphs G
1
and G
2
(Figure 8),
the cost of the editing operation d(G
1
,G
2
) to convert
G
1
into G
2
is defined by:
,
min
,…,
∈℘
,
GISTAM2015-DoctoralConsortium
4

An example is shown in Figure 2. In this operation
the changes included the removal of node v
D
, edge
v
B
v
D
, and the addition of node v
E
, edge v
C
v
E
. If the cost
of each edit operation is equal to 1, then the total edit
distance d(G1, G2) is 4.
Figure 2: Conceptual example of GED.
GED serves as the most basic analysis of graph-
based landscapes. After this, extraction of subgraphs
in the form of cliques, communities and equivalences
will be initiated.
4.3 Landscape Cliques
The term clique as used in graph theory was coined
by Luce and Perry (1949). Similar to its usage in the
social context, cliques of graphs define tightly
connected set of nodes. A clique from an undirected
graph G = (V, E) is a subgraph of G with vertex set C
∈ V, in which every pair of nodes in C is connected
to every other by an edge (see Figure 3). In other
words, a clique is a complete subgraph of a graph.
Figure 3: Conceptual example of GED.
Landscape ecology discusses the formation of
landscape components from agglomeration of smaller
landscape elements (Wiens, 2002). Cliques can be
seen as landscape components, where tightly
arranged landscape elements are relationally
interdependent on each other. The existence of a
clique demonstrates that certain compatibility
characteristics exist between landscape elements,
while its persistence through time suggests the
importance of juxtaposition between those landscape
elements in supporting their resilience. Therefore
identifying types of cliques in a landscape graph and
monitoring their persistence through time may yield
fruitful insights on landscape structure.
5 DATA
In this phase of research, we use two classified
temporal land-cover datasets from Great Bay, New
Hampshire were used for demonstration purposes.
Pre-classified images were acquired from the Coastal
Change Analysis Program. The NOAA C-CAP
project used Landsat Thematic Mapper imagery for
land-cover classification at the full 30m pixel
resolution. Our analysis is based on the patchy
landscape mosaics built from these classes. The time
span for the Great Bay data set is 7 years (1986 to
1993). For the purpose of clarity, the demonstration
area is restricted to a 5 x 5 km region extracted from
the imagery (Figure 4).
In the final part of the research, time series sets of
Landsat images will be acquired, classified and be
implemented in STRG.
Figure 4: Demonstration study area.
6 EXPECTED OUTCOME
Currently GED had yielded us with satisfactory
results regarding the changing spatial relationships
between compatible/incompatible land types in our
SpatialTemporalRelationalGraphsonConnectedLandscapes
5

study area. Partially proving that the configuration of
landscape elements is not a random act of placement,
but is driven by compatibility and processes between
different landscape elements. To further our
understanding on configurations of landscape
elements, we are exploring the existence and meaning
of subgraphs in the form of landscape cliques. The
existence of assemblages such as cliques is strong
indications that complex landscape configurations
can also be formed. It is expected this kind of
topological subgraph extraction will provide even
better evidence on the existence of landscape
patterns. The result from subgraph analysis will be
used to empirically support the concept of connected
landscapes. In total, four published research papers
are expected at the end of this study. The first paper
focuses on construction of STRG, the second paper
focuses on extraction of subgraphs from STRG, the
third focuses on analytical methods of subgraph
patterns, and finally the fourth paper is a case study
paper combining the effort of STRG with that of
traditional spatial statistics.
7 STAGE OF RESEARCH
From our current results, we are confident that a
framework based on STRG can provide a sound
foundation for empirically supporting concepts from
landscape connectivity and interacting landscape
elements.
As mentioned, the entire research is comprised of
four components, which translates to four research
papers. The STRG as a data structure is fully
developed and the International Journal of GIS has
accepted a paper regarding this aspect. The usage of
GED as a form of relational change detection has also
been fully documented and ready to be submitted. At
the moment we are exploring how subgraphs can be
extracted from the data structure, and also their
semantic meanings after they are extracted. At the
same time, we are consulting with domain experts
(landscape ecologists) regarding possible meanings
with the extracted subgraphs. The remainder of the
research including writing up of papers is expected to
take one year.
REFERENCES
Gaucherel, C., et al., 2012. Understanding patchy landscape
dynamics: towards a landscape language. PLoS ONE,
7(9).
Kupfer, J. A., 2012. Landscape ecology and biogeography:
rethinking landscape metrics in a post-FRAGSTATS
landscape. Progress in Physical Geography, 36: 400-
420.
Luce, R. D. and Perry, A. D. 1949. A method of matrix
analysis of group structure. Psychometrika, 14(1), 95 -
116.
Pascual-Hortal, L. and Saura, S., 2006. Comparison and
development of new graph-based landscape
connectivity indices: towards the priorization of habitat
patches and corridors for conservation. Landscape
Ecology, 21: 959-967.
Takeyama, M. and Couclelis, H., 1997. Map dynamics:
integrating cellular automata and GIS through Geo-
Algebra. International Journal of Geographical
Information Science, 11: 73–91.
Thibaud, R., et al., 2013. A spatio-temporal graph model
for marine dune dynamics analysis and representation.
Transactions in GIS, 17: 742-762.
Troll, C., 1939. Luftbildplan und ökologische
Bodenforschung. Ihr zweckmäßiger Einsatz für die
wissenschaftliche Erforschung und praktische
Erschließung wenig bekannter Länder. In: KAYSER,
K. ed. Zeitschrift der Gesellschaft für Erdkunde zu
Berlin. Berlin.
Wiens, J. A. 2002. Riverine landscapes: taking landscape
ecology into the water. Freshwater Biology, 47, 501-
515.
GISTAM2015-DoctoralConsortium
6
