
Optimal Irrigation Scheduling and Crop Production Functions
Development using AquaCrop and TOMLAB
Ilya Ioslovich and Raphael Linker
Faculty of Civil and Environmental Engineering, Technion–Israel Institute of Technology, 32000 Haifa, Israel
Keywords:
Irrigation Scheduling, Optimal Control.
Abstract:
Water stress is one of the most influential factors contributing to crop yield loss. The importance of the irriga-
tion constantly increases because of water scarcity and growing demand for agricultural production worldwide.
Previously, an approach using empirical water production functions and analytic optimal control methodology
has been developed for optimal irrigation scheduling. Such an approach based on numerical optimal control
is an alternative to common irrigation scheduling based on agronomy practice. Nowadays, more complex
dynamic crop simulation models, such as the FAO AquaCrop model, predict crop responses to different irri-
gation strategies and climates. The state variables of the AquaCrop model include crop characteristics, such
as biomass, and soil water content in up to 12 soil layers. In this paper the numerical optimal control scheme
for irrigation scheduling and crop water production function development is described and demonstrated using
this model and the TOMLAB optimization library. Maize crop in Foggia, Italy, for season of the year 2000, is
used as an illustrative case study.
1 INTRODUCTION
In order to cope with increased water scarcity and
hence limited water supply, the development of meth-
ods to produce efficient irrigation scheduling is an im-
portant task. Many studies were performed in this
area during decades. For instance, the effects of
the supplemental irrigation for wheat in the region
of Aleppo, North Syria, were investigated in (Oweis
et al., 2003) using the simulation model ISAREG.
Different water policies to cope with water shortage
were studied in (Amir and Fisher, 2000) for the case
of Jezreel Valley district, Israel, using linear program-
ming optimization model. Analytical optimal con-
trol was used in (Shani et al., 2004), (Shani et al.,
2009), (Ioslovich et al., 2012), in conjunction with
the simplified STZ model. This model has only two
state variables: biomass of the crop and water con-
tent of the soil. The harvest index HI (percent of
the yield to the biomass) was assumed to be constant.
No precipitation was considered and the climate in-
puts were assumed to remain constant. By compar-
ison, the FAO model AquaCrop described in (Ste-
duto et al., 2009), (Geerts et al., 2009), (Geerts et al.,
2010), (Heng et al., 2009), (Xiangxiang et al., 2013)
is much more detailed and mimics crop development
much more closely. This model has several mech-
anisms of stresses, up to 12 soil layers and accept
time-varying climate inputs. It has been used with
averaged statistical measurements for development of
crop-water production functions in (Garcia-Villa and
Fereres, 2012). However these data concerned the use
of the irrigation water were connected only with ex-
isting agronomic practice without any prospects on
its optimization. Model based optimization of irri-
gation scheduling with AquaCrop and genetic algo-
rithms has been presented in (Linker et al., 2013) for
cotton in the Northern Greece.
Here we consider the optimal control scheme for
maximization of the yield within given irrigation wa-
ter quota and development the crop-water production
function based on the set of these optimizations. The
example of a maize crop in the Foggia region, Italy,
season 2000 is presented.
2 PROBLEM FORMULATION
The considered formulation of the problem of optimal
irrigation scheduling is as follows:
J = Y(w
1
,w
2
,...,w
i
,...,w
n
) [t/ha] → max
w
1
+ w
2
+ ... + w
i
+ ... + w
n
≤ w [mm]. (1)
49
Ioslovich I. and Linker R..
Optimal Irrigation Scheduling and Crop Production Functions Development using AquaCrop and TOMLAB.
DOI: 10.5220/0005501700490052
In Proceedings of the 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2015), pages 49-52
ISBN: 978-989-758-122-9
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

Here Y is a value of yield, w
i
is daily irrigation for
day i, and w is a seasonal irrigation water quota. This
is a discrete analog of the optimal control problem as
follows:
J =
Z
t
f
t
0
f
0
(t,w(t),x(t),t)dt → max
dx
dt
= f(t,w(t),x(t)),
Z
t
f
t
0
w(t)dt ≤ w. (2)
However the functions f
0
and f(t, w(t),x(t)) are not
known and only the value of the functional J in
response to the seasonal sequence of the irrigation
events w
i
can be obtained from the AquaCrop sim-
ulation.
The AquaCrop predicts the seasonal crop devel-
opment in response to environmental variables and
irrigation. By calculating the set of these solutions
with gradually decreasing seasonal water quota w we
can construct the crop-water production function y(w)
which can be used for planning purposes both by
farmers and by water authorities.
3 CROP MODEL
The FAO Aquacrop model is widely used by many
users including farmers, water managers and agri-
cultural consultants. It represents a good balance
between accuracy, simplicity and robustness. The
AquaCrop model adequately simulates the canopy
cover, evapotranspiration, yield, and water content in
the soil. It has been successively calibrated and tested
for different crops such as cotton, wheat, tomato,
potato at different locations. Several algorithms have
been included in the AquaCrop that allow the user to
generate irrigation scheduling based on triggering ir-
rigation at user-specified soil water contents, which
should be linked to crop growth stage via the user
agronomic considerations and experience. Many de-
tails concerning this model can be found in (Steduto
et al., 2009), (Geerts et al., 2009), (Geerts et al.,
2010), (Heng et al., 2009), (Mkhabela and Bullock,
2012), (Xiangxiang et al., 2013). Though the under-
lying principles of the AquaCrop are well described,
the source code of the model is not available to users,
and thus it can be used only as a sort of black-box
model.
4 OPTIMIZATION SOLVER
We are using the TOMLAB optimization library for
MATLAB, (Holmstrom et al., 2007), that contains
many optimization solvers. The best results were
obtained by the use of OQNLP solver in combina-
tion with the qlcAssign procedure for global nonlin-
ear search. A special interface with the AquaCrop
model software was designed and used. The OQNLP
solver realizes a smart multistart heuristic algorithm
in conjunction with smooth optimization to search
for a global optimum of nonlinear constrained opti-
mization. This approach requires that we supply the
solver with a program that calculates the nonlinear
objective function (yield in our case). This function
writes the irrigation schedule in the appropriate file,
runs the AquaCrop from MATLAB and then reads
the output file generated by AquaCrop. The linear
constraint which represents the total seasonal irriga-
tion water sum is used. Throughout the optimization
search, all intermediate improving and feasible results
were recorded and the best result was retrieved after
the predefined number of iterations was reached. The
qlcAssign procedure handles problems of the form
c(x) → min
b
L
≤ Ax ≤ b
U
,
x
L
≤ x ≤ x
U
. (3)
The constraints b
U
are used as an upper limit for
daily level of the irrigation. Although AquaCrop
requires integer irrigation amounts, the optimiza-
tion was performed in continuous mode because the
mixed-integer option did not yield good results. In
order to do this we have used a scaling procedure by
multiplying the vector of irrigation values by 1E-6
before transferring it to the solver and then scaling
it back before transferring it to AquaCrop. The lin-
ear matrix of constraints has to be modified accord-
ingly. The rounding of the variables receivedfrom the
solver in float format was done with a special stochas-
tic procedure which considers the non-integer part as
a value of a probability distribution function (PDF)
which generates values in the range 0− 1 from a uni-
form random numbers generator (MATLAB function
rand).
The choice of the initial point for optimization
plays an important role. We have used the approach
reported in (Linker and Ioslovich, 2015). This ap-
proach, which has proved to be very efficient, gener-
ates sub-optimal irrigation schedules via optimal lev-
els of soil water depletion at which irrigation is trig-
gered.
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
50
5 OPTIMIZATION SCHEME
The optimization scheme for optimal irrigation
scheduling with the AquaCrop and OQNLP consists
of the following steps:
1. The initial point (seasonal irrigation sub-optimal
schedule is calculated).
2. The AquaCrop runs the initial irrigation schedule
and a special interface transforms the irrigation
schedule into initial data for OQNLP
3. The OQNLP starts and invokes the users non-
linear objective function. The objective function
writes the AquaCrop irrigation file, invokes the
AquaCrop, reads the AquaCrop output file, pro-
vides the OQNLP with objective function value,
and stores the values related to the best record.
4. The OQNLP generates the next optimization point
and continues until the given number of iterations
is exceeded or OQNLP ends the execution be-
cause the convergence criteria has been met.
6 CROP-WATER PRODUCTION
FUNCTION
The constraint related for the seasonal water quota is
gradually decreased and a set of optimizations is per-
formed. This way a number of points in the plane
w,Y is obtained. The convex hull of the set of these
points is constructed up to the point with maximal
Y and the points of the vertices of this hull are then
used to construct the crop-water production function
for this crop. A second-order polynomial is used to
fit these vertices. Unlike e.g. in (Garcia-Villa and
Fereres, 2012) which used so-called ”best agronomic
practice” this production function represents the opti-
mal irrigation scheduling.
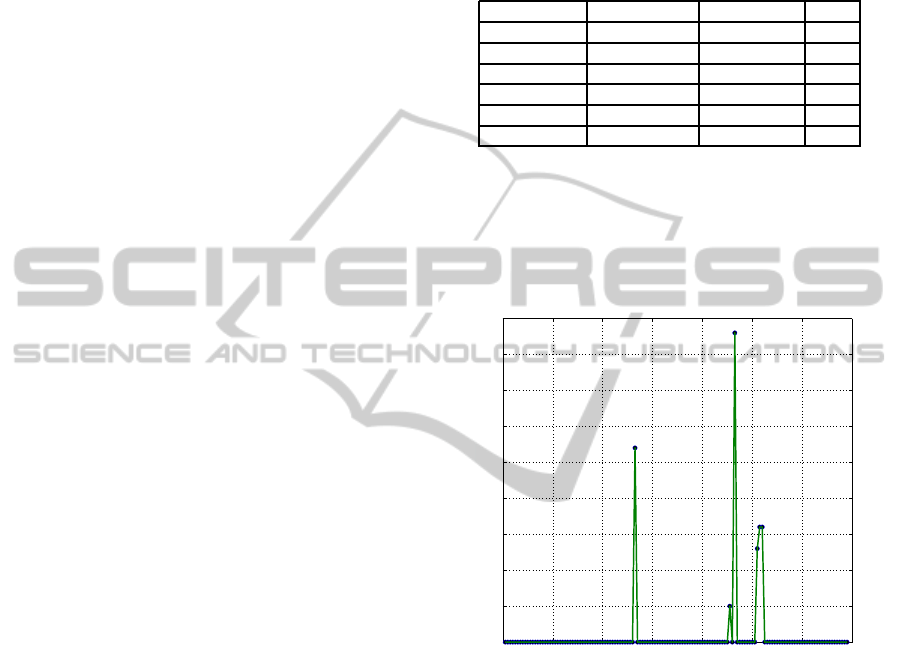
7 RESULTS FOR MAIZE IN
FOGGIA
The results for maize crop in Foggia region, Italy, sea-
son 2000, are shown in Fig. 1 and Fig.2. The simu-
lated period is 138 days long started on 22 of March
2000. Fig 1. represents the optimal irrigation sched-
ule for the water quota 120 [mm]. There are 5 irriga-
tion events throughout the season. The Fig. 2 shows
the crop-water production function together with the
convex hull vertices marked by ’*’, the approximated
points marked by ’o’, and suboptimal points marked
by ’+’. One can see that the mean increase in yield
gives about 10 [kg/ha] of yield per 1 [mm] of irriga-
tion. The table 1 shows the data corresponding to the
basic points.
Table 1: Basic points of the crop-water production function
for seasonal irrigation. Maize irrigation in Foggia, 2000.
Basic point Quota [mm] Yield [t/ha] HI
1 11 11,506 48,3
2 27 11,821 48,3
3 44 12,095 48,3
4 59 12,266 48,4
5 89 12,483 48,3
6 120 12,588 48,3
One can notice that the harvest index HI is rather
the same for all the basic points, which indicates
that while the biomass is limited by the water quota,
the value of the yield for the optimal irrigation takes
rather the same part of the total biomass for different
quotas.
0 20 40 60 80 100 120 140
0
5
10
15
20
25
30
35
40
45
Days after planting
Irrigation [mm]
Figure 1: Optimal irrigation scheduling for seasonal irriga-
tion quota 120 [mm]. Maize in Foggia, Italy, year 2000.
Irrigation levels marked as ’o’.
8 CONCLUSIONS
The optimization of the irrigation scheduling may be
performed using the optimal control scheme and the
Aquacrop model as demonstrated in this paper. The
agronomic knowledge is already incorporated in the
model and can be used in a limited way by supply-
ing of the reasonable initial point for these calcula-
tions. The crop-water production functions can be
developed based on the optimal irrigation scheduling
for different water quotas. This approach has been
demonstrated for a maize crop in the Foggia region,
Southern Italy, season 2000.
OptimalIrrigationSchedulingandCropProductionFunctionsDevelopmentusingAquaCropandTOMLAB
51

0 50 100 150 200 250
11.2
11.4
11.6
11.8
12
12.2
12.4
12.6
12.8
Irrigation water
Yield
Figure 2: Crop-water production function. Yield [t/ha] vs.
irrigation water [mm]. Maize in Foggia, Italy, year 2000.
Suboptimal points marked as black ’o’, basic points of the
convex hull marked as ’*’, points from quadratic approxi-
mation marked as ’o’.
ACKNOWLEDGEMENTS
The research leading to these results has received
funding from the European Community’s Seventh
Framework Programme (FP7/2007-2013) under grant
agreement n 311903–FIGARO (Flexible and Pre-
cise Irrigation Platform to Improve Farm-Scale Water
Productivity) (http://www.figaro-irrigation.net/). The
contents of this document are the sole responsibility
of the FIGARO Consortium and can under no cir-
cumstances be regarded as reflecting the position of
the European Union. This Research was supported
by Technion General Research Fund.
REFERENCES
Amir, I. and Fisher, F. (2000). Response of near optimal
agricultural production to water policies. Agricultural
Systems, 64:115–130.
Garcia-Villa, M. and Fereres, E. (2012). Combining the
simulation crop model AquaCrop with an economic
model for the optimisation of irrigation management
at farm level. European Journal of Agronomy, 36:21–
31.
Geerts, S., Raes, D., and Garcia, M. (2010). Using
AquaCrop to derive deficit irrigation schedules. Agri-
cultural Water Management, 98:213–216.
Geerts, S., Raes, D., Garcia, M., Miranda, R., Cusicanqui,
J., A., Taboada, C., Mendoza, J., Huanca, R., Mamani,
A., Condori, O., Mamani, J., Morales, B., Osco, V.,
and Steduto, P. (2009). Simulating yield response of
Quinoa to water availability with AquaCrop. Agron-
omy Journal, 101:499–508.
Heng, L. K., Hsiao, T., C., S, E., Howell, T., and P, S.
(2009). Validating the FAO AcuaCrop model for irri-
gated and water deficient field maize. Agronomy Jour-
nal, 101:488–498.
Holmstrom, K., Goran, A., O., and Edvall M., M.
(2007). Users Guide for TOMLAB/OQNLP.
http://tomopt.com/tomlab/products/oqnlp/.
Ioslovich, I., Borshchevsky, M., and Gutman, P.-O. (2012).
On optimal irrigation scheduling. Dynamics of Con-
tinuous, Discrete and Impulsive Systems, Series B:
Applications and Algorithms, 19:303–310.
Linker, R. and Ioslovich, I. (2015). A multi-year simu-
lation study of optimal and sub-optimal irrigation of
maize in Kansas. In 2015 ASABE Annual Interna-
tional Meeting in New Orleans, Louisiana, USA, July
26-July 29. ASABE Online Technical Library.
Linker, R., Sylaos, G., and Ioslovich, I. (2013). Optimiza-
tion of irrigation scheduling using genetic algorithms
and AcuaCrop: a case study for cotton in Northern
Greece. In Proceedings of the International Confer-
ence on Agriculture Science and Environmental En-
gineering (ICASEE 2013), DVD. December 19-20,
Beijing, China, paper ICASEE 132117.
Mkhabela, M., S. and Bullock, P., R. (2012). Performance
of the FAO AcroCrop model for wheat grain yield and
soil moisture simulation in Western Canada. Agricul-
tural Water Management, 110:16–24.
Oweis, T., Rodrigues, P., N., and Pereira, L., S. (2003).
Tools for Drought Mitigation in Mediterranean re-
gions. Simulation of Supplemental Irrigation Strate-
gies for Wheat in near East to Cope with Water
Scarcity, pages 259–272. Kluwer Academic Publish-
ers.
Shani, U., Tsur, Y., and Zemel, A. (2004). Optimal dynamic
irrigation schemes. Optimal Control Applications and
methods, 25:91–106.
Shani, U., Tsur, Y., Zemel, A., and Zilberman, D. (2009).
Irrigation production functions with water-capital sub-
stitution. Agricultural Economics, 40:55–66.
Steduto, P., Hsiao, T., C., Raes, D., and Ferereset, E. (2009).
AcuaCrop the FAO crop model to simulate yield re-
sponce to water: I. concepts and underlying princi-
ples. Agronomy Journal, 101:426–437.
Xiangxiang, W., Quanjiu, W., Jun, F., and Quiping, F.
(2013). Evaluation of the AquaCrop model for sim-
ulating the impact of water deficits and different ir-
rigation regimes on the biomass and yield of winter
wheat grown on China’s Loess Plateau. Agricultural
Water Management, 129:95–104.
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
52
