
A High Performance Class of DSTBC for HAPs
Benigno Rodr´ıguez and Juan Pablo Gonz´alez
Institute of Electrical Engineering, Faculty of Engineering, Universidad de la Rep´ublica, Montevideo, Uruguay
Keywords:
Project Management, Blended Learning, Communication, Integration.
Abstract:
High Altitude Platforms (HAPs) has been an interesting topic for years, but today it has a renewed interest
for several companies, organizations and governments. In this paper a high performance class of Differential
Space Time Block Codes (DSTBCs) is analysed for HAPs. The results show that this particular class of
DSTBCs is a good alternative to consider for HAPs communications.
1 INTRODUCTION
HAPs is not a new topic, but it has renewed atten-
tion from the moment that Google
1
and some gov-
ernments, like the Brazilian one
2
pay attention to it.
In Google’s web page for “Project Loon” a descrip-
tion of Google project can be read. The idea is to
provide Internet access without using traditional in-
frastructure, in this way places where Internet is still
not available can be served. For this purpose, strato-
spheric balloons powered by solar energy at an alti-
tude of 20 km approximately are considered.
If it is true that there are several organizational
tasks to solve in this particular project, probably
global and giant companies like Google are the ones
who have the best conditions to cope with them.
On the other hand, as it was said, it is not a new
idea
3 4 5
, there is an accumulated amount of know
how over this technology, just by reference Skynet,
Skystation projects are two Japanese projects in these
area. HeliNet and CAPANINA (Eurpean projects)
and ETRI and KARI (Korean projects) are other ex-
amples of research in this area.
Provided that Orthogonal Frequency Division
Multiplexing (OFDM) is a robust and well proved
system in several different applications is natural to
consider it as an alternative and evaluate it. Some dif-
1
http://www.google.com/intl/es419/loon/?utm
source=google
&utm
medium=cpc&utm campaign=Global semBK es.
2
http://www.telesemana.com/blog/2013/10/15/al-igual-que-go
ogle-brasil-llevara-internet-a-zonas-remotas-a-traves-de-globos/
3
http://www.haps.cl/tour
arte5.htm.
4
http://www.wtec.org/loyola/wireless/0d
14.htm.
5
http://www.stanford.edu/class/msande237/viewgraphs/Ohmo
ri3.pdf
ferences between HAPs and other wireless systems is
the particular channel and high frequencies used for
them (40 GHz)
6
.
The robust Space Time Block Coding (STBC)
technique has already been considered for HAPs ap-
plications
7
. In this work a particular Differential
Space Time Block Code (DSTBC) technique, pro-
posed for OFDM systems will be evaluated for HAPs
applications.
For more information about the use of MIMO-
OFDM in HAPs communications, the reader can
check Chapter 20 in (Jiang et al., 2010). Just to show
the potential of this technology, a recent trial in Swe-
den can be mentioned, there, operating in the range
of millimeter waves, at 24 km of altitude, a cover-
age area of 60 km in diameter was achieved. Three
important advantages of HAPs compared with satel-
lite systems are that the first ones are much more
cheaper, faster to deploy and are placed at less alti-
tude (less distance for the radio link) than the second
ones. Among the applications tested over HAPs are:
Internet access via WiFi, High Definition Television
(HDTV), mobile communications, etc.
2 CHANNEL MODEL AND
SCENARIOS
The stratospheric channels may cause strong attenua-
tion, Doppler shifts and multipath fading, apart form
atmospheric attenuation due to rain when millimeter
waves band is used. To model this kind of wireless
6
http://www.haps.cl/documentos/12.pdf.
7
http://www.haps.cl/documentos/14.pdf.
Rodríguez B. and González J..
A High Performance Class of DSTBC for HAPs.
DOI: 10.5220/0005507200670070
In Proceedings of the 12th International Conference on Wireless Information Networks and Systems (WINSYS-2015), pages 67-70
ISBN: 978-989-758-119-9
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
communications three scenarios can be considered,
“Parking on land”, “Takeoff and landing” and “Fly-
ing platform” (as in footnote 6). The evaluation of the
HAPs in these three scenarios is representative of its
general performance during operation.
The system is considered to work around a central
frequency ( f
0
) of 40 GHz. For “Parking on land” sce-
nario a velocity of 3 m/s was considered, for “Takeoff
and landing” scenario the velocity was of 15 m/s and
for the “Flying platform” scenarios a velocity of 30
m/s was used (as in footnote 6).
As channel model, a Wide Sense Stationary with
Uncorrelated Scattered (WSSUS) channel was con-
sidered. In order to estimate the maximum time delay
for multipath fading (τ
max
) the decision to consider
reflections inside a radius of 200 meters was made.
At 40 GHz the electromagnetic waves are atten-
uated by rain falls, but in this work this natural phe-
nomena is not considered. To have a raw idea of how
millimeter wave are attenuated with rain falls (ITU-R,
2005), (Barabino and Rodr´ıguez, 2013) and (El-Disi,
2010) can be consulted.
On Table 1 the simulation parameters used for
these three scenarios are shown.
Table 1: Simulation parameters.
Parameter Value
Carrier Frequency f
c
= 40 GHz
Bandwidth B = 16 MHz
Number of subcarriers N
FFT
= 128
Subcarrier spacing ∆f =
B
N
FFT
= 125 KHz
Symbol Duration T
s
= 8 µs
Guard interval T
G
=
T
s
8
= 1 µs
Symbol interval T
S+G
= T
s
+ T
G
= 9 µs
Number of paths P = 30
Number of clusters (groups of paths) N
c
= 1
Maximum time delay τ
max
= 0, 8895//0, 6313//0, 6067 µs
HAP velocity v = 3//15//30 m/s
Maximum Doppler shift f
Dmax
= f
0
·
v
c
≈ 400//2000//4000 Hz
using f
0
= f
c
Time Delay distribution b =
τ
max
ln(1000)
= 0, 1288//0, 0914//0, 0878 µs
3 TRANSMISSION SYSTEM
As a transmission system, a DSTBC OFDM sys-
tem with 2 transmit antennas and 1 receive antenna
(2x1) is considered. It has been extensively proved
as an efficient and very robust system. Particularly
in this work the DSTBC class defined in (Rodr´ıguez
and Rohling, 2006) (“4A16PSK PCM2”) and exten-
sively analysed in (Rodr´ıguez and Rohling, 2007),
(Rodr´ıguez, 2007), (Rodr´ıguez, 2012) is evaluated
for HAPs applications. The description of 4A16PSK
PCM2 can also be read from Chapter 10 in (Jiang
et al., 2010).
4 RESULTS
To estimate the performance of 4A16PSK PCM2
technique for HAPs applications, three representative
scenarios were considered as it was previously ex-
plained. In this section the results obtained for each
scenario are discussed.
• PARKING ON LAND
The simulation parameters considered for this sce-
nario were: f
0
= 40 GHz, v = 3 m/s and τ
max
=
0,8895 µs.
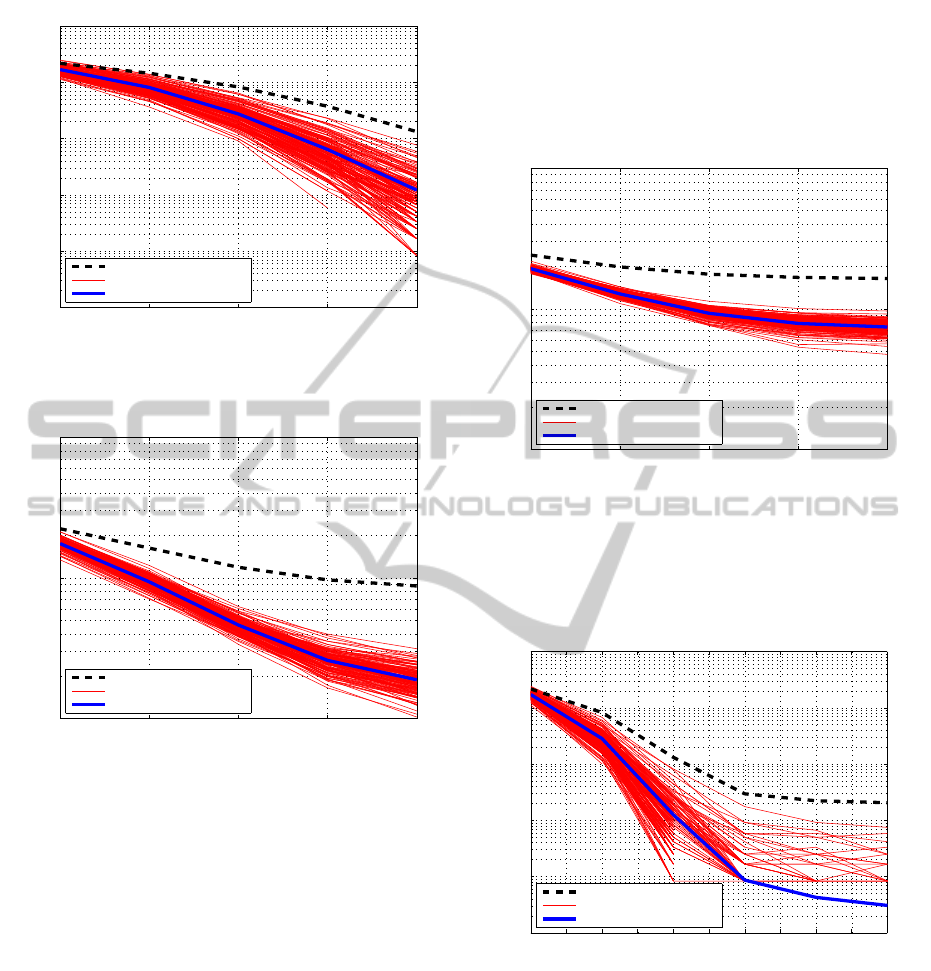
In Fig. 1, the performance of 4A16PSK PCM2
technique is compared with conventional 64-PSK
modulation used in DSTBC. By comparing the aver-
age performance obtained for 4A16PSK PCM2 and
for 64-PSK a good advantage for the first one can
be observed. In particular for BER = 1x10
−1
an
improvement of 4,6 dB can be obtained by using
4A16PSK PCM2 instead of 64-PSK. These results
were compared without using any channel coding
technique in order to compare directly the perfor-
mance difference between these two techniques (the
proposed in (Rodr´ıguez and Rohling, 2006) and the
reference technique -conventional 64-PSK-). How
things change when channel coding is used is anal-
ysed in (Rodr´ıguez, 2007). There the reader can
see that the advantage for 4A16PSK PCM2 is main-
tained but a little bit diminished; how much can de-
pend on the channel coding technique considered, in
(Rodr´ıguez, 2007) convolutional coding and Viterbi
decoding was considered.
• TAKEOFF AND LANDING
At this scenario the simulation parameters were: f
0
=
40 GHz, v = 15 m/s and τ
max
= 0, 6313 µs.
In Fig. 2 an improvement of 10 dB can be ob-
tained for BER = 1x10
−1
. For this scenario the im-
provement is much higher than for the previous one.
The convenience of considering 4A16PSK PCM2 is
very clear. Further more, considering the simplicity
of this technique, this should be had in account for
these kind of applications.
15 20 25 30 35
10
−5
10
−4
10
−3
10
−2
10
−1
10
0
SNR [dB]
BER
64−PSK average
4A16PSK PCM2 realizations
4A16PSK PCM2 average
Figure 1: BER versus SNR results for “Parking on Land”
scenario.
15 20 25 30 35
10
−2
10
−1
10
0
SNR [dB]
BER
64−PSK average
4A16PSK PCM2 realizations
4A16PSK PCM2 average
Figure 2: BER versus SNR results for “Takeoff and Land-
ing” scenario.
• FLYING PLATFORM
The parameters considered for this scenario were:
f
0
= 40 GHz, v = 30 m/s and τ
max
= 0, 6067 µs.
In Fig. 3 is also very evident the advantage of us-
ing 4A16PSK PCM2 instead of 64-PSK in DSTBCs.
In this figure, something that can take the reader’s at-
tention is that BER do not improves enough when the
SNR is increased. To explain it, the results in Fig.
4 are shown, there the same scenario is analyzed but
this time with a central frequency of 4 GHz instead of
40 GHz, then a more natural behaviour for BER ver-
sus SNR is observed. What happens is that for central
frequency of 40 GHz, a velocity of 30 m/s is very
high one, and it deteriorates the performance defini-
tively, then the improvement in SNR do not play a
perceptively role in the general performance. When
the central frequency is diminished to 4 GHz, then for
this frequency 30 m/s is not a so high velocity and
does not deteriorate the performance in a so severe
way than previously; then for this case when SNR is
increased BER is improved in a much more natural
way.
15 20 25 30 35
10
−2
10
−1
10
0
SNR [dB]
BER
64−PSK average
4A16PSK PCM2 realizations
4A16PSK PCM2 average
Figure 3: BER versus SNR results for “Flying Platform”
scenario.
The parameters considered in Fig. 4 simulation
were: f
0
= 4 GHz, v = 30 m/s and τ
max
= 0, 6067 µs.
15 20 25 30 35 40 45 50 55 60 65
10
−5
10
−4
10
−3
10
−2
10
−1
10
0
SNR [dB]
BER
64−PSK average
4A16PSK PCM2 realizations
4A16PSK PCM2 average
Figure 4: BER versus SNR results for “Flying Platform”
scenario (f
0
= 4 GHz).
5 CONCLUSIONS
For the three considered scenarios, 4A16PSK PCM2
demonstrated to be a much better option to conven-
tional 64-PSK modulation technique, when DSTBC
OFDM systems are considered for HAPs applica-
tions. In (Rodr´ıguez, 2007) the reader can check that

the difference in complexity between these two tech-
niques are not high.
At 40 GHz, even a speed of 30 m/s is high speed
distorting very much the performanceof the transmis-
sion. Apart from that 40 GHz is a frequency that can
be significantly affected by rain falls. These are two
challenging aspects of working in this range of fre-
quencies. By considering lower frequencies these two
aspects could be improved.
It is also interesting to remark that by using
receive diversity in the downlink, the performance
can be significantly improved (see Section 7 in
(Rodr´ıguez, 2007)). Which is still more interesting
considering that at 40 GHz is not a problem to have
several antennas in the receiver. Also is possible to
have receive diversity in the uplink by using several
receive antennas in the HAP.
Considering the present interest in HAPs, and
what the state of the art of the OFDM techniques can
offer nowadays, HAPs seems to be a very promising
alternative in near future.
ACKNOWLEDGEMENTS
The authors thank to Comisi´on Sectorial de Inves-
tigaci´on Cient´ıfica (CSIC). This work was partially
supported by CSIC, Universidad de la Rep´ublica.
REFERENCES
Barabino, N. and Rodr´ıguez, B. (2013). Performance
evaluation of FSO and MMW for the uruguayan
weather conditions. Wireless Personal Communica-
tions, 73:1077–1088.
El-Disi, A. Y. (2010). A thesis on utilizing high alti-
tude platforms (HAPs) to provide wireless communi-
cations coverage to close coverage gaps - case study:
Providing UMTS service to the non-radar coverage
area in the gulf of mexico region (GOMEX).
ITU-R (2005). International telecommunication union ra-
diocommunication sector, specific attenuation model
for rain for use in prediction method. Recommenda-
tion ITU-R P.838-3.
Jiang, T., Song, L., and Zhang, Y. (2010). Orthogonal Fre-
quency Division Multiple Access Fundamentals and
Applications. CRC Press, Taylor and Francis, Florida,
USA.
Rodr´ıguez, B. (2007). Differential STBC for OFDM based
Wireless Systems. PhD thesis, Technische Universit¨at
Hamburg-Harburg (TUHH), Department of Telecom-
munications.
Rodr´ıguez, B. (2012). Differential space time block codes
for high mobility scenarios. In Proc. of the Interna-
tional Conference on Wireless Information Networks
and Systems (WINSYS 2012), pages 377–381, Rome,
Italy.
Rodr´ıguez, B. and Rohling, H. (2006). A new class of
differential space time block codes. In Proc. of the
11
th
International OFDM-Workshop, pages 106–110,
Hamburg, Germany.
Rodr´ıguez, B. and Rohling, H. (2007). Receive diversity in
DSTBC using APSK modulation schemes. In Proc. of
the 12
nd
International OFDM-Workshop, pages 90–
94, Hamburg, Germany.
