
SIM
A Flexible, Scalable and Expandable Simulation Platform Applying to Lunar Orbit
Rendezvous Mission
Sun Fuyu, Wang Hua, Guo Shuai and Li Haiyang
College of Aerospace Science and Engineering, National University of Defense Technology, Changsha, China
Keywords: Distributed Simulation, Layered-design Theory, Model-templet, Simulation Platform, Lunar Orbit
Rendezvous Mission.
Abstract: In this paper we propose a new simulation platform called SIM, for analyzing parallel and distributed
systems. This platform aims to test parallel and distributed architectures and applications. The main
characteristics of SIM are flexibility, scalability and expandability. SIM is about five functions: model
management, experiment management, distribution management, operation management and node
management. To improve the efficiency of project development, new models are designed for lunar orbit
rendezvous mission to apply the simulation platform. Finally, a validation process and evaluation tests have
been performed to evaluate the SIM platform and lunar orbit rendezvous mission models. The simulation
platform and models will lay the foundation for the more validations of autonomy technology in manned
lunar landing research.
1 INTRODUCTION
Nowadays as an important research in aerospace
field manned lunar landing is getting more and more
attention from many space powers such as America,
Russia, and other European countries (Bocam et al.,
2005 and Santovincenzo, 2004). Apollo is the most
representative in the history of exploring the moon.
Lunar orbit rendezvous technology has proved to be
very useful in the Apollo plan (Reeves, 2005).
The methodology of exploring the moon can be
classified into earth orbit rendezvous and lunar orbit
rendezvous. The earth orbit rendezvous method
separates the spacecraft into many modules which
are assembled on the orbit near the earth. As the
mainstream of exploring the moon, the earth orbit
rendezvous method is widely adopted by many
countries such as the Crew Exploration Vehicle of
America (Raftery and Fox, 2007), the Flier plan of
Russia, and the Architecture Study for Sustainable
Lunar Exploration by ESA CDF Study Academy
(Santovincenzo, 2004). The earth orbit rendezvous is
a mature and highly reliable technology, but it needs
more fuel and longer rendezvous period which is
very unbeneficial to the whole mission. The lunar
orbit rendezvous method is to assemble all the
modules of the moon exploring spacecraft on the
lunar orbit. Because of the smaller gravity of the
moon, it costs less fuels to dock on the lunar orbit.
Thence, it is appreciated by more and more countries
as a new method to explore the moon.
Lunar orbit rendezvous is an independent and
complicated mission. It is necessary to verify the
reliability and security of the mission by the
technology of distributed simulation. Many countries
have committed a large number of resources to build
suitable simulation platforms in the related field.
These platforms are playing important roles in the
ground experiment.
Some of these simulators are focused on
simulating. And the entire system provides
functional execution of unmodified commercial
operating systems and applications such as COTSon
(Argollo et al., 2009), a simulator framework jointly
developed by HP Labs and AMD that provides
accurate evaluations of current and future computing;
M5 (Binkert et al., 2006), which supports the
execution of the entire system, including operating
system code, models of network and disk devices;
Simics (Magnusson et al., 2002), another full-system
simulator that was one of the first academic projects
in this area and the first commercial full-system
simulator; and SimOS (Rosenblum et al., 1995 and
Rosenblum et al., 1997), an environment for
77
Fuyu S., Hua W., Shuai G. and Haiyang L..
SIM - A Flexible, Scalable and Expandable Simulation Platform Applying to Lunar Orbit Rendezvous Mission.
DOI: 10.5220/0005508900770087
In Proceedings of the 5th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH-2015),
pages 77-87
ISBN: 978-989-758-120-5
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

studying the hardware and software of computer
systems. These simulators are called full-system
simulators. The main advantage of those simulators
is the high level of accuracy obtained, whereas the
main drawback is its performance, which in most
cases is five or six orders of magnitude slower than a
real system.
Moreover, there are approaches that do not focus
on modelling and simulating the system with a full
level of detail instead on balancing the level of detail
to model the system with the performance and
accuracy obtained. For instance, Phantom (Zhai et al.,
2010) proposes a novel approach to predict the
sequential computation time accurately and
efficiently by integrating a computation-time
acquisition approach with a trace-driven network
simulator. dPerf (Cornea and Bourgeois, 2010) is a
tool that uses Rose (Liao et al., 2009) for performing
static analysis of the input source code of programs
written in C, C++, or Fortran.
There are also other works that focused on
distributed storage architectures. One example of
this kind of system is Modeling Infrastructure for
Dynamic Active Storage (MIDAS) (Tarapore et al.,
2008). MIDAS is an execution-driven simulator that
captures both the processing and I/O behavior of
active storage systems. MIDAS simulates a host
system interacting with the I/O path via an
interconnection network. The simulated I/O path can
include disk drives with programmable processors
and programmable storage controllers. The
micro-architecture of each one of these components
is configurable. With this framework, the effects of
different processor micro-architectures, physical disk
and network designs, and communication protocols
on application performance can be explored.
Due to the high number of domains in the field of
distributed systems, developing a universal simulator
is impractical and unfeasible. Naturally, each
researcher has its own objectives and requirements,
and the same way each simulator is developed for a
specific purpose. Many existing simulators do not fit
the researcher’s requirements. As a result,
researchers have to modify an existing simulator, or
coding a new one. But coding a simulator from
scratch is a very complex and difficult task. Usually,
researchers use simulation frameworks for building a
specific simulator.
In this paper, we propose a new simulation
platform called SIM, which is oriented towards
analyzing and studying parallel applications on
distributed systems. SIM has been designed to
provide flexibility, accuracy, performance, and
scalability. Those features make it a powerful
simulation platform for designing, testing and
analyzing both actual and non-existent architectures.
Simulation Systems range from a single computing
node to a complete high performance distributed
system. In fact, this simulation platform has been
applied to data systems simulation in the 921
Manned Space Office of China.
The rest of the paper is structured as follows.
Section 2 presents some requirements. Section 3
describes the basic architecture of SIM. Section 4
shows the strategies and the tools to model
distributed environments in SIM. Section 5 presents
practical implementation and experimental results.
Finally, Section 6 presents some conclusions and
future works.
2 REQUIREMENTS
Actualization of the lunar orbit mission puts forward
higher requirements of the project system such as
higher precision of the lunch vehicle operational
accuracy, more powerful relative navigation or
rendezvous and docking of spacecraft, shorter
response period of measurement and control
communication system, higher precision of
measurement and control instrument. Aspects needed
to be verified from the whole project are:
(1) The Mission Profile Verification
Verifying validity and rationality among the
systems and mission phases of the lunar orbit
rendezvous.
(2) Mission Software Verification
Verifying validity of the software used by the
lunar orbit rendezvous test experiment. These
softwares include lunch window calculation,
orbit determination and fuel injection, spacecraft
GNC.
(3) Flight Control Strategy
Verifying validity of the flight control strategy.
Verifying the effects of orbit error on the flight
control. Verifying the strategy for the orbit
fault-pattern. Verifying the optimal methods of
the flight control.
(4) Visual Presentation for Flight Process
Visual presentation for the whole flight process
of lunar orbit rendezvous. Providing visual image
of 3D scene, subastral point of the flight process.
Considering common problems of simulation
platforms for different kinds of aerospace missions,
we must understand the structure of the new
platform and relationship among function layers
before designing. We must ensure sufficient
versatility, standardization and extendibility of the
SIMULTECH2015-5thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
78
platform. The following points shall be paid
attention to:
(1) Most platforms are suited to only one kind of
models. In the face of complicated aerospace
projects, modeling development is not
complicated by one person or one company. Type
of singleness brings much trouble to the system
integration job.
(2) Most platforms are built for the special missions
in many academies and aerospace institutions.
Simulation platforms are not separated from
models because model program is embedded into
the platform. As models change, the platform
inner structure program will be compiled again.
(3) Most platforms run short of user interface. Only
program structure about initialization, operation,
and reprocessing is exposed by these platforms.
It is not convenient for the experiment design or
visual display.
3 BASIC ARCHITECTURE
Simulation platform is the key of overall simulation
system. In order to meet the integration of different
kinds of models, simulation platform should provide
support for the bottom of different simulation
applications. As it is said that, taking advantage of
universalization, standardization and scalability of
simulation platform, will reduce the difficulty of
system development and the period of model
establishment. Therefore, the quality of a platform is
the evaluation standard for a simulation system. For
a simulation system, its universalization feature
means that the platform is suited to many kinds of
applications. In this paper, they are ground tests to
different kinds of aerospace missions.
Standardization emphasizes specificity among
function-layers, criterion of connections between
platform-platform and platform-model. Scalability is
saying that the SIM simulator is prepared to
cooperate with other simulation tools by performing
different roles. There are two main scenarios:
Integrating an external simulator within SIM or
integrating the SIM framework within another
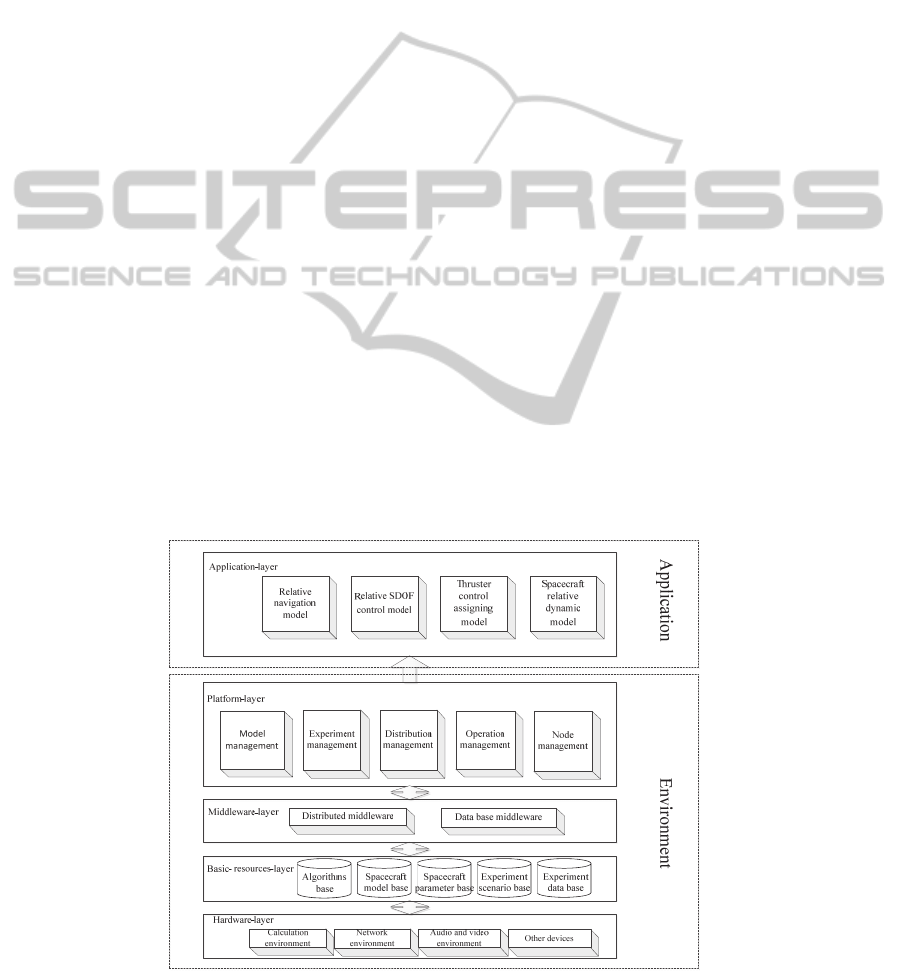
simulator. Figure 1 shows the simulation system
architecture.
SIM simulator consists of model management,
experiment management, distribution management,
operation management and node management.
Model management function can unify different
kinds of models by making operations with the
whole models or amending the information of a
single model. Its design concentrates on
layered-design theory. It realizes the separation
between platform and models, model description and
model realization. It is convenient for modeling,
design of the experiment or the subsequent
construction of simulation system.
Experiment management is mainly to assemble
models with visualization software, configure
connections among models, set model attributes. It
establishes a communication bridge between user
and simulation system. An excellent user interface
does not only bring users enjoyable feelings, but also
Figure 1: The simulation system architecture.
SIM-AFlexible,ScalableandExpandableSimulationPlatformApplyingtoLunarOrbitRendezvousMission
79

simplify the simulation experiment from foundation
to testament. It is worth mentioning that
layered-design theory is also used in the design
concept of the experiment management. It separates
models and model connections to increase flexibility
of test design and reusability of models.
Distribution management adopts the idea of
“distributed calculation, concentrated management”.
It distributes each model and model parameters to
every node based on simulation scenarios. User can
operate models which are on the node or the
computer itself remotely. Related information will be
shown on the test interface.
Simulation operation management is designed
with responsibility for driving different kinds of
models and attemperring distributedly. Meanwhile, it
can also monitor the state of node and reserve data at
breakpoint.
Node management is disposed on the calculation
node computer with the function of node guard,
model scheduling, and node state reporting. The
function is in cooperation with manager node
computer.
3.1 Model Management
Model management is the most basic and important
function of platform. Each model works as a block.
With the existing of model management function,
simple blocks can be stacked to form the complex
tall building and great mansion. Model management
function drives and supervises models based on the
specific characteristic.
3.1.1 Multipurpose Model-templet
In this paper, multipurpose model-templet is set up
for the connections of different kinds of models. It
doesn’t only provide security for interaction between
model and platform or model and model, but also
provide convenience for modeling and model library
construction in the future.
SIM can drive three kinds of models at present.
We distinguish them by Model A, B and C.
Model A is a kind of simulation subsystem
software which can be operating in Windows
environment independently. It exists in the form of
executable program(.exe). Connections of Model A
include model basic information, model initial
parameters, model input parameters, model output
parameters and some files related to executable
program. SIM drives Model A in the way of memory
mapping. The file mapping to the memory which is
marked by the name of model, can respond the
control instruction to complete the function of model
initialization, step-by-step running, parameter
modifying, stopping and so on.
The connection of Model B consists of three
specialized functions. Data structure must be
encapsulated by standard as the connection form
which is satisfied with platform request. Model B
exists by the form of dynamic link library (dll). This
kind of model is so flexible that, it can be installed
on any node. The form of model external port is
“pInit, pInput, pOutput”. Initialization is presented
by a pointer “pInit”. In the process of a simulation,
some constant parameters which are used to describe
model characteristics are pointed by “pInit”. “pInput”
is used to reserve parameters varied by time which
are transferred to the model. By the same token,
“pOutput” is used to reserve parameters the model
exports. For example:
Initial Function:
Void XXX_Init (void *pInit, void *pInput, void
*pOutput, void *pUser).
Steplike Function:
Void XXX_Sim (void *pInit, void *pInput, void
*pOutput, void *pUser)
Reprocessing Function:
Void XXX_End (void *pInit, void *pInput, void
*pOutput, void *pUser).
Where, XXX is the model name which can fully
describe model function. “*pInit” is the pointer of
model initial data. “*pInput/*pOutput” is the pointer
describing the model input/output data. “*pUser” is
the pointer to reserve the data which is defined by
user himself. Three functions are set up to perform
the model function of initialization, step-by-step
running and stopping.
Model C presents the model in MATLAB. The
connection consists of the same information as
Model B.
3.1.2 Complex Model Driving
Generally speaking, a single variable can be reserved
and assessed at any place by the computer. But
structure variable is not like this. For different types
of member variables, assessing process occurs at
special place. Because every member variable is
reserved in order in the memory.
The substance of data transmission between
models is copying certain amount of memory space
to another memory place. And model initialization
parameters, input parameters and output parameters
are encapsulated into structure. Each parameter is the
member of the structure. In this case, at the
beginning of data transferring, not only memory
SIMULTECH2015-5thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
80
space but also memory address of each parameter
must to be known.
Different compiling environment, the detail of
structure memory alignment is a little different, but
has the same rule. Two concepts are introduced here.
The first one is variable alignment parameter. In
Windows (32)/VC6.0 compiling environment,
variable alignment parameter is just the variable
accounting for the size in bytes. But in Linux
compiling environment, some variable alignment
parameters are based on operating system
performance.
Except for variable alignment parameter, there is
another alignment parameter called compiler
alignment parameter (#pragma pack(n)). This
numerical value can be set not only by code, but also
modifying compiler property. In Windows (32)/
VC6.0 compiling environment, “n” cannot be
anything but 1/2/4/8, 8 is the default value. In Linux
(32) GCC compiling environment, “n” only equals
1/2/4, its default value is 4.
After realizing the concepts of above-mentioned,
two rules about structure memory alignment will be
understood easily.
1) The character offset of each member in the
structure to the first address must be integral
multiple of the variable alignment parameter. If it
is not, the memory will supply some related
bytes after the last member.
2) The memory space occupied by the structure is
integral multiple of alignment parameter. The
same with last rule, if it does not meet the request,
the memory will supply some related bytes after
the last member. The alignment parameter in the
sentence equals the less one of the biggest of all
the members between the compiler alignment
parameter.
Complex models are drived by the node model
driving software. Based on each type of
model-templet, SIM realizes the function of model
initialization, operating, reprocessing, time hopping
operation and cooperates experiment models with
different steps assuring the coherence of model
running.
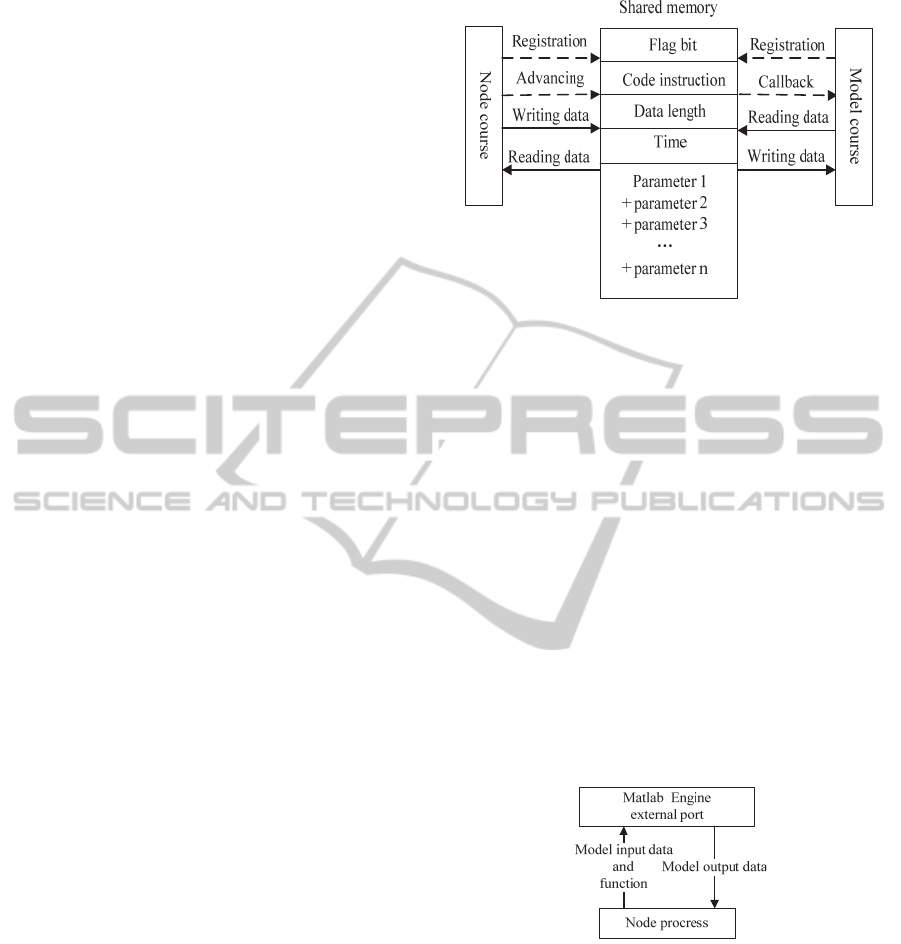
Figure 2 shows the theory of Model A driving.
Node model driving software writes data into the
shared memory based on the protocol. Models read
input data from the shared memory, and write output
data into the shared memory after operating.
The connection of model B consists of three
functions. Node model driving software drives
models by the three functions. They are initial
function, model operation control function and
reprocessing function.
Figure 2: Node model driving software and theory of
Model A driving.
To enhance the operating efficiency of simulation
platform, large of initial jobs are done in the model
initial function. 1) The platform can distribute
memory space for all the model initial /input/output
parameters. 2) The platform can find the memory
address of each model input parameter in the
structure according to the model connections. 3) The
platform can reorder the model based on the model
operation sequence. 4) The platform can drive each
initial function of models.
Model operation control function determines the
simulation cycle index based on platform simulation
step and model step. Platform drives models orderly
based on model operation sequence.
Reprocessing function invokes each reprocessing
function of models, and releases the memory space
opened before.
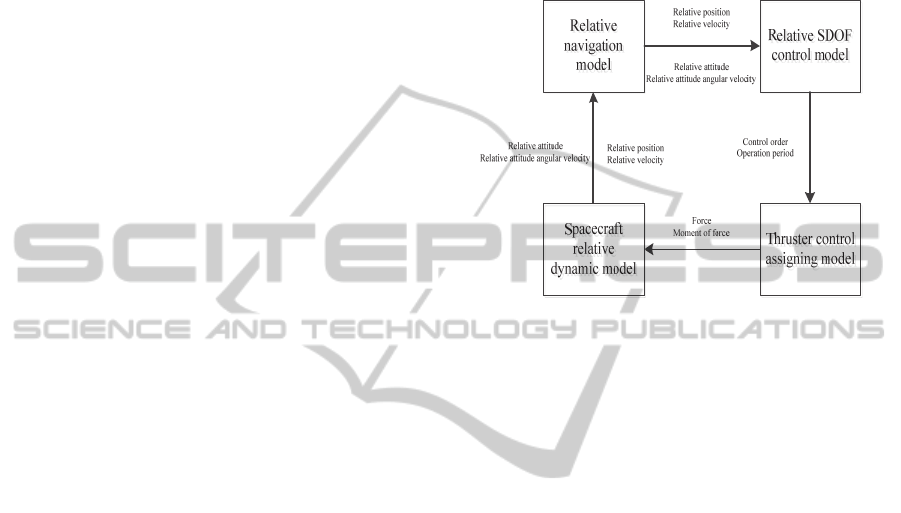
Figure 3: Schematic diagram of Model C driving.
Figure 3 is the schematic diagram of Model C
driving. Node model driving software brings m(mdl)
file to Matlab Engine to make calculation through
Matlab Engine external interface, then reads
computing results from Matlab Engine. In this mode,
the relationship between node model driving
software and Matlab Engine is C/S(Client/Service).
Node model driving software regarding as a
calculation servicer, through the distributed platform,
sends or receives messages to Matlab Engine. The
messages include orders and data information.
SIM-AFlexible,ScalableandExpandableSimulationPlatformApplyingtoLunarOrbitRendezvousMission
81
3.2 Other Function Management
Experiment management is to assemble models
taking the form of visualization, configure model
connections, distribute calculation nodes for models,
model parameters, model simulation step, simulation
condition, forming the simulation scenario.
User finishes configuring models in the form of
graphical modeling, selecting models in the form of
dragging, designing data stream in the form of
connection. It becomes the concrete simulation
experiment after assembling. Model is shown as a
rectangular module with input/output ports. User
finishes assembling models by the operation like
clicking, dragging, and connecting. On the process
of model assembling, if the input port doesn’t match
an output port, the platform will give an alarm.
Models used to be assembled come from model
library.
Distribution simulation management is designed
using the thought of “distributed calculation,
concentrated management”. One of the main goals is
distributing models and model parameters to each of
related nodes, and operating models on the node or
node computer itself in the long distance based on
the simulation scenario. Simulation scenario is its
input. After operating, user can see the operation tips
on the user interface.
Operation management includes distributed
scheduling, node supervising, simulation breakpoint
reserving. It is the foundation of simulation system
distributed operation. Operation management
program is set in the management node computer. It
can drive or distribute models on the calculation
node. At the same time, it can supervise the node
state in the long distance, and reserve the experiment
information at breakpoint.
Node management is set on the calculation node.
It is the foundation of “distributed calculation,
concentrated management”. Its main goals are node
watching, driving the model on the node and
reporting of the node state. It echoes operation
management which is set on the management node.
It drives and distributes models on the calculation
node based on the simulation scenario file, and
reports the state of local node to management node
computer.
3.3 Modelling Distributed Environment
In the process of modeling for lunar orbit rendezvous
mission, it is very important to consider the
complicated spacecraft dynamic conditions, and high
precision of the navigation and control in the close
range rendezvous phase. These factors request
sufficient accuracy of relates models. In the aspect of
modeling, program developing must obey the
standard of each type model port.
According to the requirements of the mission, we
build relative navigation model, relative SDOF
control model, thruster control assigning model, and
spacecraft relative dynamic model.
Figure 4: The information flow chart of models.
Figure 4 presents the information flow chart of
models. At the beginning of the simulation, the first
group input data is the initialization of the relative
navigation model. After filtering calculation,
measuring error is decreased, and the output data is
the relative state between the spacecrafts. The
relative state is as the input of the relative SDOF
control model, through a series of control calculation,
its output is the orders and operation period of the
thrusters. Thruster control assigning model
calculates force and moment of force based on the
thruster orders. Spacecraft relative dynamic model
inversely works out the relative state of spacecrafts
which is controlled based on the output data from the
thruster control assigning model. The relative state is
regarded as the input on the next step.
In the process of modeling, we also use the
model-templet to restrict the model ports. The above
several models are developed in the form of dynamic
link library. Model is named by capital English
acronyms XXX. Each model includes the initial
function XXX_init, Steplike function XXX_sim, and
reprocessing function XXX_end. Three functions
have the unified form. For example, the initial
function of the relative navigation model is designed
as Void RelNavigation_Init (void *pInit, void
*pInput, void *pOutput, void *pUser). It is
convenient for model management and model
driving background.
Figure 5 is the class diagram of lunar orbit
rendezvous simulation system.
SIMULTECH2015-5thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
82
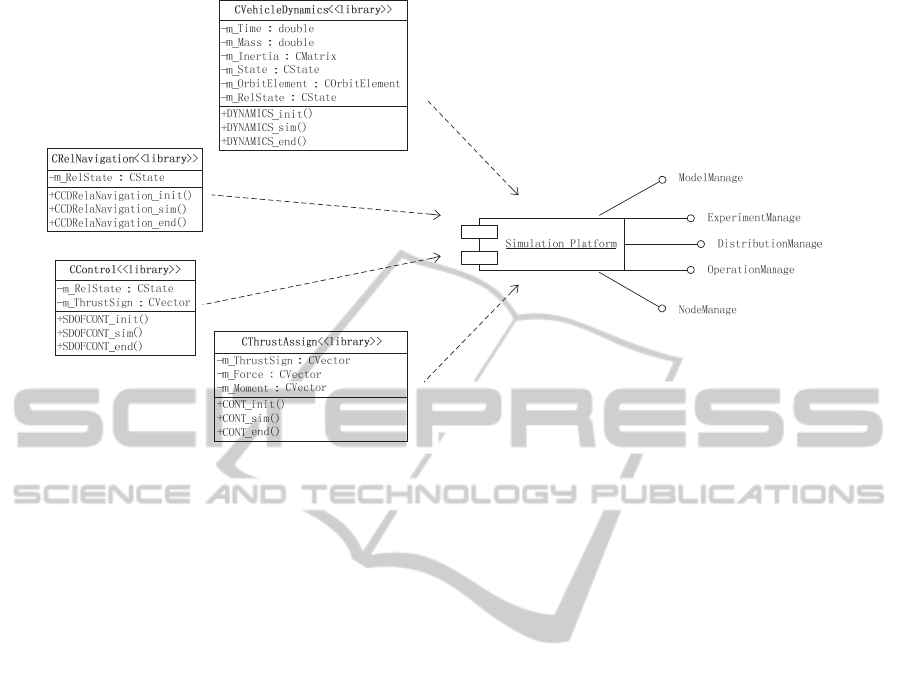
Figure 5: Class diagram of lunar orbit rendezvous simulation system.
From the class diagram, we can see that, the
whole simulation system consists of spacecraft
relative dynamic module, relative navigation module,
relative SDOF control module, and thruster control
assigning module. And, spacecraft relative dynamic
module called CVehicleDynamics includes three
functions which are DYNAMIC_init,
DYNAMIC_sim and DYNAMIC_end. Among them,
the function of DYNAMIC_sim includes many
functions referring to the basic spacecraft dynamic.
Such as coordinate system transformation,
orbital/attitude parameters transformation, spacecraft
precision orbit determination. One of the main
functions is the state transferring function which can
transfer the absolute state of the spacecrafts to the
relative state between them in the Hill coordinate. It
is easy to analyze the problems of the spacecraft
rendezvous at close range by the use of the relative
state between two spacecrafts.
One of the main goals of relative navigation
module which is named of CCDRelNavigation is
decreasing the effects of measure noise to the
docking sensor. It consists of three functions. They
are called CCDRelaNavigation_init,
CCDRelaNavigation_sim and
CCDRelaNavigation_end. Moreover,
CCDRelaNavigation_sim function encapsulates
some familiar filter methods. State transfer matrix
and state equation mentioned in the filter method are
worked out based on the spacecraft relative
orbital/attitude equations.
Relative SDOF control module and thruster
control assigning module form the chase control
section. By the use of phase plane control method,
CControl module receives navigation data,
producing control signs and bring them to
CThrustAssign module. CThrustAssign module
gives out relative state data which is after the
control.
As it is mentioned, SimulationPlatform presents
SIM simulator. It has the function of model
management, experiment management, distribution
management, operation management and node
management.
4 EXPERIMENTAL RESULTS
Making a test is a key link to verify the simulation
platform. By analyzing the results of experiment,
advantage and disadvantage of the platform and
models will be found. It is beneficial for the platform
to be developed and upgraded in the future. For
models, we can also make some significant
conclusions and found for modeling on the next step.
At the same time, experiment results are the standard
to estimate the validity of platform and models. In
this section, we make a test about lunar orbit
rendezvous simulation system.
The initialization of experiment is that target
vehicle is moving in an approximately circular orbit
around the moon. The orbit altitude is 300
kilometers. Its orbit angular velocity is 0.0007615
SIM-AFlexible,ScalableandExpandableSimulationPlatformApplyingtoLunarOrbitRendezvousMission
83

radian per second. The influence of the perturbative
force to vehicles is not concerned, and attitude/orbit
control motors maintain constant power. Initial
simulation parameters and initial model parameters
are set as Table 1 and Table 2.
Table 1: Initial parameters of the simulation system.
Simulation initial condition parameters
Starting time 0 s
System step 0.5 s
Step number 0
Terminal time 800 s
Current time 0 s
Model step 0.05 s
Table 2: Initial parameters of models.
Model initial condition parameters
Relative position [100, 0.01, 0.8] m
Relative velocity [-0.155, -0.07, 0.01] m/s
Relative attitude angle [2, 2, 2] deg
Relative attitude angle velocity [0.02, 0.04, 0.02] deg/s
chase vehicle moment of inertia
[7285.46, 0.00, 0.00; 0.00, 6666.67, 0.00; 0.00, 0.00, 3285.47]
target vehicle moment of inertia
[7000.00, 0.00, 0.00; 0.00, 7000.00, 0.00; 0.00, 0.00, 5000.00]
chase vehicle mass 4000 kg
chase vehicle size [1, 0, 0] m
Thruster force arm [2.00, 2.00, 1.21] m
Position of the chase vehicle docking interface [0.50, 2.00, 1.21] m
Position of the target vehicle docking interface [0.50, 2.00, 1.21] m
Force of the orbit thruster [25.00, 25.00, 25.00] N
Force of the attitude thruster [10.00, 10.00, 10.00] N
Installation position of CCD camera [1.00, 0.00, 0.00]
Viewing angle of CCD camera [6, 6] deg
Viewing point of CCD camera 30 m
Position of mooring 30 m
Milestone of velocity 60 m
Mooring time 300 s
X position error(short/long range) [0.02, 0.006; 0.15, 0.005] m
Y/Z position error(S/L range) [0.02, 0.005; 0.2, 0.004] m
Vx error(S/L range) [0.01, 0.006; 0.15, 0.01] m/s
Vy/Vz error(S/L range) [0.01, 0.01; 0.2, 0.018] m/s
X attitude angle error(S/L range) [0.23; 0.3] deg
Y/Z attitude angle error (S/L range) [0.25; 0.3] deg
x attitude angle velocity (S/L range) [0.17, 0.012; 0.2, 0.002] deg/s
y/z attitude angle velocity (S/L range) [0.2, 0.02; 0.3, 0.005] deg/s
SIMULTECH2015-5thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
84
In view of the above test configuration, we make
a test. The experiment results are as follow.
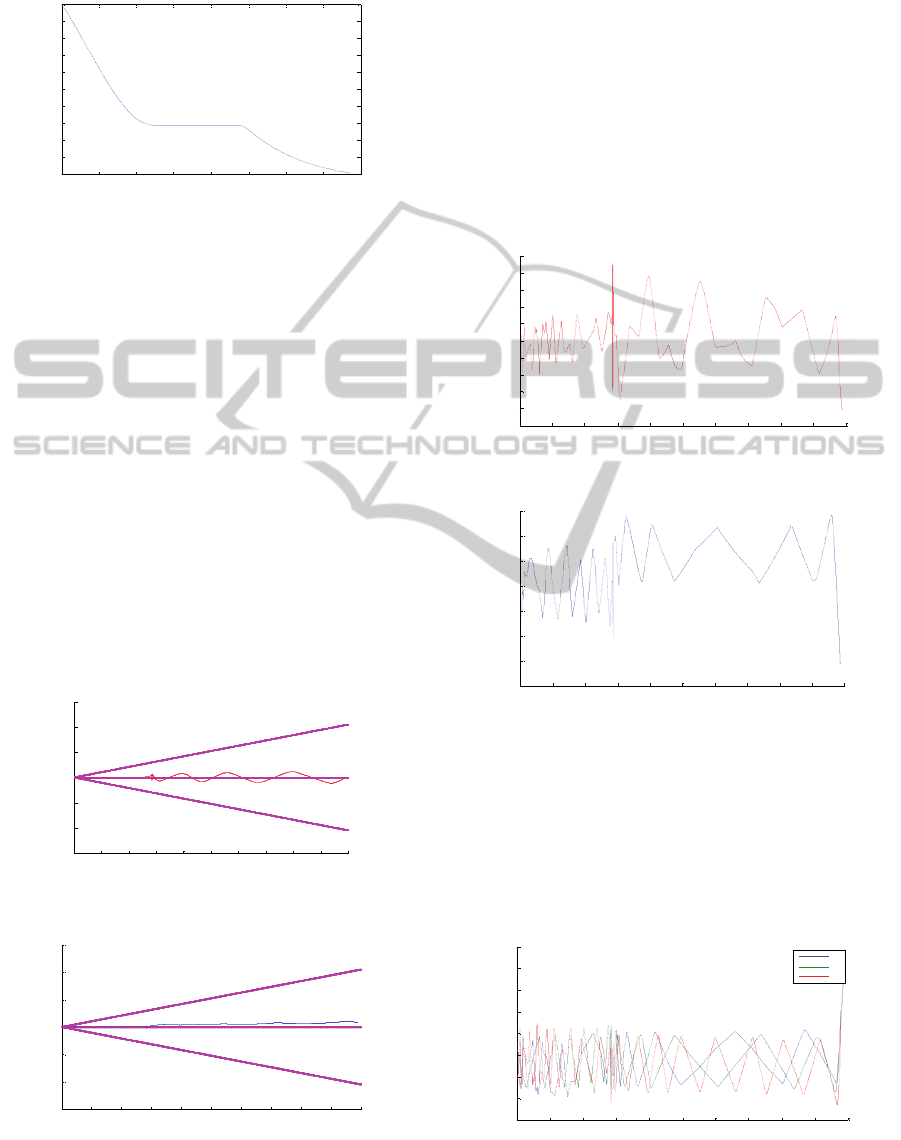
Figure 6: The X position transferring with time.
1) Figure 6 shows the X position transferring with
time. In this graph, we can see the relative
position of the two spacecrafts changing from
100 meters to 0 meter in the end. In the distance
of 30 meters, the chase vehicle stops for 300
seconds at predetermined location. The period of
the whole docking process is about 780 seconds.
Because the terminal time of simulation platform
is 800 seconds, relative position is keeping 0
meter during the last 20 seconds.
2) Figure 7-Figure 8 respectively describes the
process of relative Y/Z position changing with
the docking distance. As approaching of two
spacecrafts, the amplitude of the relative Y/Z
position is decreasing, converging to 0 meter at
last. In the process, target vehicle is staying in the
CCD detecting scope of the chase vehicle all the
time.
Figure 7: The Y position transferring with docking
distance.
Figure 8: The Z position transferring with docking
distance.
3) Figure 9-Figure 10 respectively describes the
changing process of azimuth angle and pitch
angle of CCD camera with the docking distance.
The Attitude of Chase vehicle is controlled by
impulses of attitude control engine continuously.
When the distance between two spacecrafts is
near, target vehicle is easy to deviate from the
detection scope of the chase vehicle. By the
correct flight strategy and suitable control mean,
target vehicle doesn’t deviate from the scope, but
azimuth/pitch angle is going to converge in the
range of
0.5
. It illuminates the control strategy
used in the model is available.
Figure 9: Azimuth angle of CCD camera.
Figure 10: Pitch angle of CCD camera.
4) Figure 11-Figure 12 respectively shows the
changing process of relative altitude angle and
altitude angular velocity between two spacecrafts
with the docking distance. At the end of the
docking process, relative altitude angle precision
can reach
0.5deg
, relative altitude angular
velocity precision can reach
0.1deg/
s
.
Figure 11: Relative altitude angle.
0 100 200 300 400 500 600 700 800
0
10
20
30
40
50
60
70
80
90
100
Tim e (s )
X posi ti on (m
)
0 10 20 30 40 50 60 70 80 90 100
-15
-10
-5
0
5
10
15
X position (m)
Y posi ti on (m)
0 10 20 30 40 50 60 70 80 90 100
-15
-10
-5
0
5
10
15
X position (m)
Z posi ti on (m)
0 10 20 30 40 50 60 70 80 90 100
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
X position (m)
CCD Az imuth angl e
az ( deg)
0 10 20 30 40 50 60 70 80 90 100
-2
-1.5
-1
-0.5
0
0.5
1
1.5
X position (m)
CCD pi tch angl e
el (deg)
0 10 20 30 40 50 60 70 80 90 100
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
X position (m)
Attitude angle
,
,
(°)
SIM-AFlexible,ScalableandExpandableSimulationPlatformApplyingtoLunarOrbitRendezvousMission
85
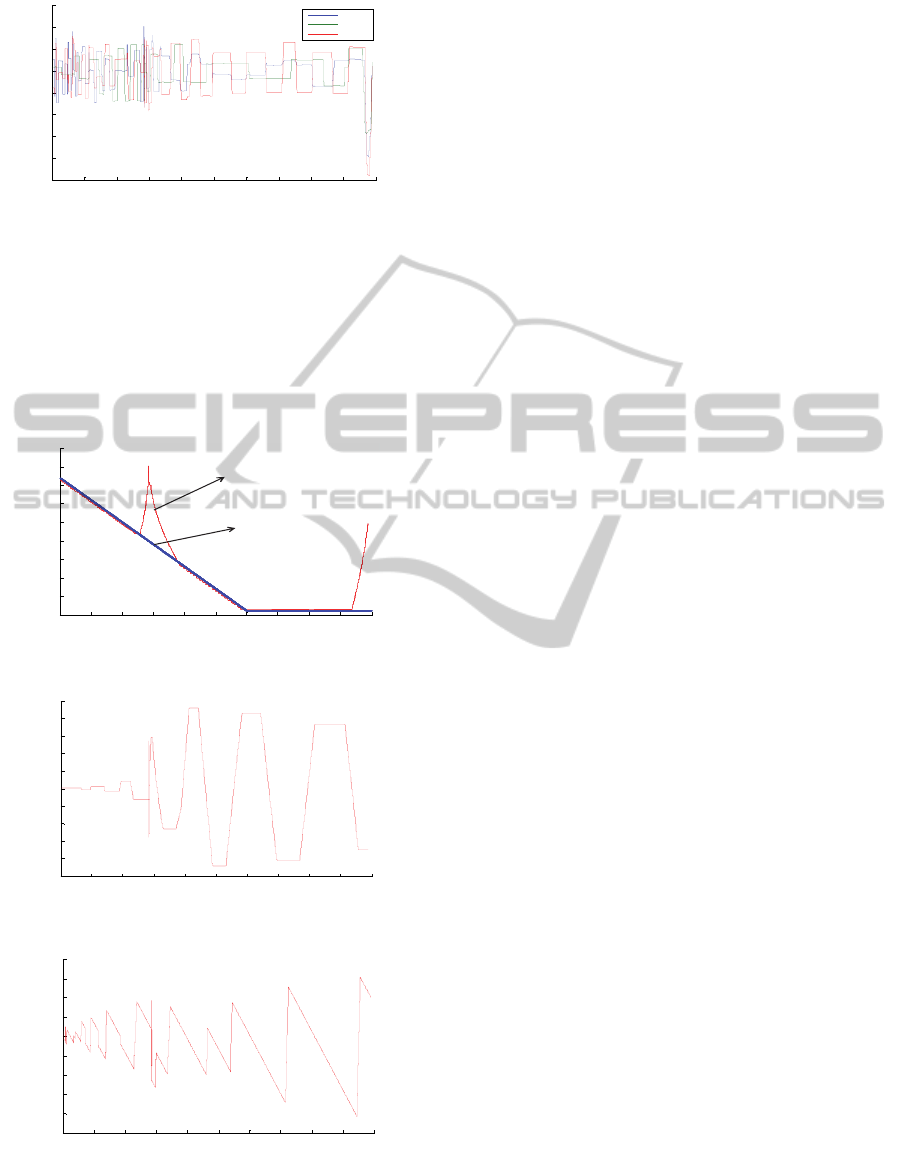
Figure 12: Altitude angular velocity.
5) Figure 13-Figure 15 respectively shows the
changing process of velocity between two
spacecrafts with the docking distance. At the end
of the docking process, the relative velocity
precision can be controlled in the range of
0.05 /ms
which meets the requirements of
spacecraft docking velocity.
Figure 13: Changing process of Vx.
Figure 14: Changing process of Vy.
Figure 15: Changing process of Vz.
5 CONCLUSIONS
In this paper we present a modelling and simulation
platform called SIM, which aims towards the study
of parallel applications on distributed systems. This
platform eases the process of designing and testing
both the applications and the architectures.
The features of this platform are as follows. First,
a great level of flexibility that allows modelling a
wide range of designs is presented. Second, a
friendly user interface, which helps to design the
experiment and look for the architecture limits and
bottlenecks is shown. Finally, the most important
feature is a good separation between the platform
and models which decreases much trouble in the
process of system assembling.
The platform presents a modular design where
the main components are the basic systems of
distributed architecture such as computing, memory,
storage, and network. This design also follows a
hierarchical philosophy, where basic modules are
grouped to compose bigger modules. SIM also
provides several modules to simulate different
components, and modeling strategies. Furthermore,
the system allows the implementation of new
modules by using a standardized interface.
Moreover, a series of models aon lunar orbit
rendezvous has been performed. Relative navigation
model, relative SDOF control model, thruster control
assigning model, and spacecraft relative dynamic
model have been configured and executed in SIM.
Our platform shows very good result in the level
of accuracy and performance obtained.
Future works on increasing the functionality of
SIM are as following. First, a tool for modeling
design and compiling. Second, encapsulation and
decapsulation design for experiment models. Third,
applying to multiple middleware protocols. Finally,
accumulating and developing models. In the above
case, we can lay the foundation of the manned lunar
landing mission next step.
REFERENCES
Bocam K. J, Brown C. M., Nelson D. K., et al., 2005. A
Space Exploration Architecture for Human Lunar
Missions and Beyond. 1st Space Exploration
Conference: Continuing the Voyage of Discovery 30
January-1 February 2005, Orlando, Florida.
Santovincenzo A., 2004. Architecture Study for
Sustainable Lunar Exploration. ESA CDF Study
Report.
0 10 20 30 40 50 60 70 80 90 100
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
X position (m)
At t it ude angular vel ocit y\dphi ,dt heta, dpsi (°/ s)
dphi
dtheta
dpsi
0 10 20 30 40 50 60 70 80 90 100
-0.4
-0.35
-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
X position
(
m
)
Vx ( m/s
)
The actual curve
The curve without berthing
0 10 20 30 40 50 60 70 80 90 100
-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
X position (m)
Vy (m/s)
0 10 20 30 40 50 60 70 80 90 100
-0.025
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
X position (m)
Vz (m/s)
SIMULTECH2015-5thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
86

Reeves D. M., 2005. The Apollo Lunar Orbit Rendezvous
Architecture Decision Revisited. AIAA 2005-4011.
Raftery M., Fox T., 2007. The Crew Exploration Vehicle
(CEV) and the Next Generation of Human Spaceflight.
Acta Astronautica.
Argollo E., A. Falcon, Faraboschi P., Monchiero M.,
Ortega D., 2009. COTSon: infrastructure for full
system simulation, SIGOPS Operating Systems,
Review 43 (1) (2009) 52–61.
Binkert N. L., Dreslinski R. G., Hsu L. R., Lim K. T.,
Saidi A.G., Reinhardt S.K., 2006. The M5 simulator:
modeling networked systems, IEEE Micro 26 (4) (2006)
52–60.
Magnusson P., Christensson M., Eskilson J., Forsgren D.,
Hallberg G., Hogberg J., Larsson F., Moestedt A.,
Werner B., 2002. Simics: a full system simulation
platform, Computer 35 (2) (2002) 50–58.
Rosenblum M., Herrod S. A., Witchel E., Gupta A., 1995.
Complete computer system simulation: the SimOS
approach, Parallel & Distributed Technology: Systems
& Applications, IEEE 3 (4) (1995) 34–43.
Rosenblum M., Bugnion E., Devine S., Herrod S. A., 1997.
Using the SimOS machine simulator to study complex
computer systems, ACM Transactions on Modeling
and Computer Simulation 7 (1) (1997) 78–103.
Zhai J., Chen W., Zheng W., 2010. PHANTOM: predicting
performance of parallel applications on large-scale
parallel machines using a single node, in: PPoPP’10:
Proceedings of the 15th ACM SIGPLAN Symposium
on Principles and Practice of Parallel Programming,
ACM, New York, NY, USA, 2010, pp. 305–314.
Cornea B., Bourgeois J., 2010. Simulation of a P2P
parallel computing environment–introducing dPerf, a
tool for predicting the performance of parallel MPI or
P2P-SAP applications, Technical Report RT2010-04,
LIFC–Laboratoire d’Informatique de l’Universite de
Franche Comte, March 2010.
Liao C., Quinlan D. J., Vuduc R. W., Panas T., 2009.
Effective source-to-source outlining to support whole
program empirical optimization, in: LCPC’09: 22
nd
International Workshop on Languages and Compilers
for Parallel Computing, 2009, pp. 308–322.
Tarapore S., Smullen C., Gurumurthi S., 2008. MIDAS: An
execution-driven simulator for active storage
architectures, in: Workshop on Modeling,
Benchmarking, and Simulation (Held in Conjunction
with ISCA 2008), Beijing, China, 2008, pp. 1–10.
SIM-AFlexible,ScalableandExpandableSimulationPlatformApplyingtoLunarOrbitRendezvousMission
87
