
Feasibility Study of a Pair of 2-DOF Step-climbing Units for a
Manual Wheelchair User
Yoshikazu Mori
1
, Kaoru Katsumura
2
and Katsuya Nagase
3
1
Department of Intelligent Systems Engineering, Ibaraki University, 4-12-1 Nakanarusawa-cho, Hitachi, 316-8511, Japan
2
Tamron Co., Ltd., 1385 Hasunuma, Minuma-ku, Saitama-shi, Saitama 337-8556, Japan
3
Takahata Precision Co., Ltd., 390 Maemada, Sakaigawa-cho, Fuefuki-shi, Yamanashi 406-0843, Japan
Keywords: Wheelchair, Step-climbing, Assist Unit, Person with Lower Limb Disability, Rehabilitation, Mechatronics.
Abstract: We have developed a pair of step-climbing units that can be installed in a standard manual wheelchair. We
aim to enable manual wheelchair users to establish an independent life that they can lead without assistance.
This mechanism is simpler because it uses the capabilities of the wheelchair user. Each unit comprises two
actuators and has two degrees of freedom: telescopic motion and rotational motion. We mainly discuss a step-
climbing motion using this system. Experimental results obtained when ascending the step of 15 cm height
confirm the design's effectiveness.
1 INTRODUCTION
Persons with disabilities attributable to the lower
limbs are becoming increasingly numerous
worldwide. In Japan, they number about 3,480,000
(severely disabled persons were about 760,000) in
2006 (Ministry of Health, Labour and Welfare, 2015).
Most people with disability of lower limbs use
wheelchairs because of their high maneuverability,
stability, and wide availability at low cost.
Nevertheless, wheelchairs have their shortcomings:
traveling on uneven ground, e.g. a step or a steep
slope, is difficult; wheelchairs necessitate the use of a
multipurpose toilet; and difficulty in accessing high
places and mental stress result from the low eye
position of the user. Particularly, a worker using a
wheelchair has strong demands related to the first
problem because steps at a home or store entrance
might prevent a wheelchair user from entering.
Various mechanisms for lifting wheelchairs have
been proposed to solve difficulties in coping with
surmounting steps. Many mechanisms have been
proposed for the lifting of front casters. Yokota et al.
applied a similar mechanism to each front caster of
the wheelchair and added an electromagnetic brake.
The prototype wheelchair climbed a 50-mm step with
an oblique approach (Yokota, et. al., 2012). Most
wheelchair users, however, are able to lift the front
casters stably. Moreover, they are able to maintain the
balance of their position through training at a reha-
rehabilitation center.
Figure 1: Conceptual design of the step-climbing unit.
J-MAX, which has two telescopic legs and which
realizes smooth and continuous climbing motions, is
an example for stairs (Nabtesco Corp., 2015).
Although J-MAX is of great practical use, it requires
a specially designed wheelchair and a caregiver who
is trained to handle this system. Some stair-climbing
wheelchairs, of which iBOT is a representative
product, have been developed recently (Independence
Technology LLC, 2015). Other wheelchairs have
been developed with mechanisms using crawlers and
links (Fang et al., 2012; Lawn et al., 2003, and
TopChair, 2015). These wheelchairs have excellent
properties for uneven ground. However, some room
Mainlink
Sublink
196
Mori Y., Katsumura K. and Nagase K..
Feasibility Study of a Pair of 2-DOF Step-climbing Units for a Manual Wheelchair User.
DOI: 10.5220/0005510401960201
In Proceedings of the 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2015), pages 196-201
ISBN: 978-989-758-123-6
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

remains for discussion to find the best wheelchair
type for a wheelchair user who lives mainly in flat
environments.
This paper presents a pair of step-climbing units
for a manual wheelchair user based on actual
demands. We aim to extend the range of action of
wheelchair users who have no caregiver (Mori et al.,
2011). The conceptual design and the hardware of the
step-climbing unit are presented. We discuss the
experimental results when surmounting a step.
Figure 2: Procedure for climbing a step.
2 CONCEPTUAL DESIGN
An assistive device for steps greatly expands the
sphere of activity of wheelchair users and supports
their independent life. Our research concept is
described below.
(1) Target users of this system are manual wheelchair
users. Users climb a step (15 cm maximum
height) with no helper.
(2) The units of this system can be attached to a
conventional wheelchair as a retrofit.
(3) The mechanism is simple because it makes use of
the wheelchair user capabilities.
(4) The mechanism prevents a user from falling
backward by supporting the wheelchair from the
rear.
First, regarding concept (1), some steps exist all over
the environments even if barrier-free designs have
been promoted. They present barriers to a wheelchair
user’s activity. Assistance for the wheelchair imposes
a burden on a caregiver. The wheelchair user might
sometimes feel it to be a mental burden. Therefore,
step-climbing ability without a caregiver present is
important, especially for active wheelchair users. We
choose the maximum height of the target step as 15
cm. In terms of (2), many wheelchair users use each
customized wheelchair fit to personal physical traits.
This merit is also effective to prevent pressure ulcers
of the buttocks. Concept (3) is effective for practical
use. The ability to lift the front casters contributes to
the light weight, the compact size, easy maintenance,
and so forth. Concept (4) is related to the safety. Some
supporting mechanism from the rear is indispensable
when climbing the step.
We have proposed a pair of step-climbing units
for a manual wheelchair user that satisfy the above
conditions as shown in Figure 1. Each unit comprises
two actuators and has two degrees of freedom: a
prismatic joint and a rotational joint. Those units are
installed on the back frames of the wheelchair. They
do not prevent the wheelchair from being folded. It is
therefore easy to carry the wheelchair with units by a
car. The unit arrangement realizes effective step-
climbing.
The procedure used for surmounting a step is
depicted in Figure 2. The user approaches the step as
shown in (a) and lifts the front casters, as shown in
(b). From step (b) to step (c), the wheelchair is
gradually going up to the top of the step as the links
are stretching. Finally, in step (d), the user goes
forward on the step and resets the links to the initial
positions. The user executes the motion in the reverse
direction when descending the step.
3 TRAJECTORY GENERATION
WHEN ASCENDING A STEP
Figure 3 depicts the model applied when a wheelchair
climbs up a step. Tilt angle
w
u
is calculated from the
following equation.
w
u
(1)
In that equation, the following variables are used.
u
: coordinate systems relative to the contact point
between the rear wheel and the floor (the lowest
position of the rear wheel when climbing a step)
m
,
w
: coordinate systems relative to the wheel
center of the front caster and the rear wheel,
respectively
1
R ,
2
R : respective radii of the rear wheel and the
front caster
(a) (b)
(c) (d)
FeasibilityStudyofaPairof2-DOFStep-climbingUnitsforaManualWheelchairUser
197
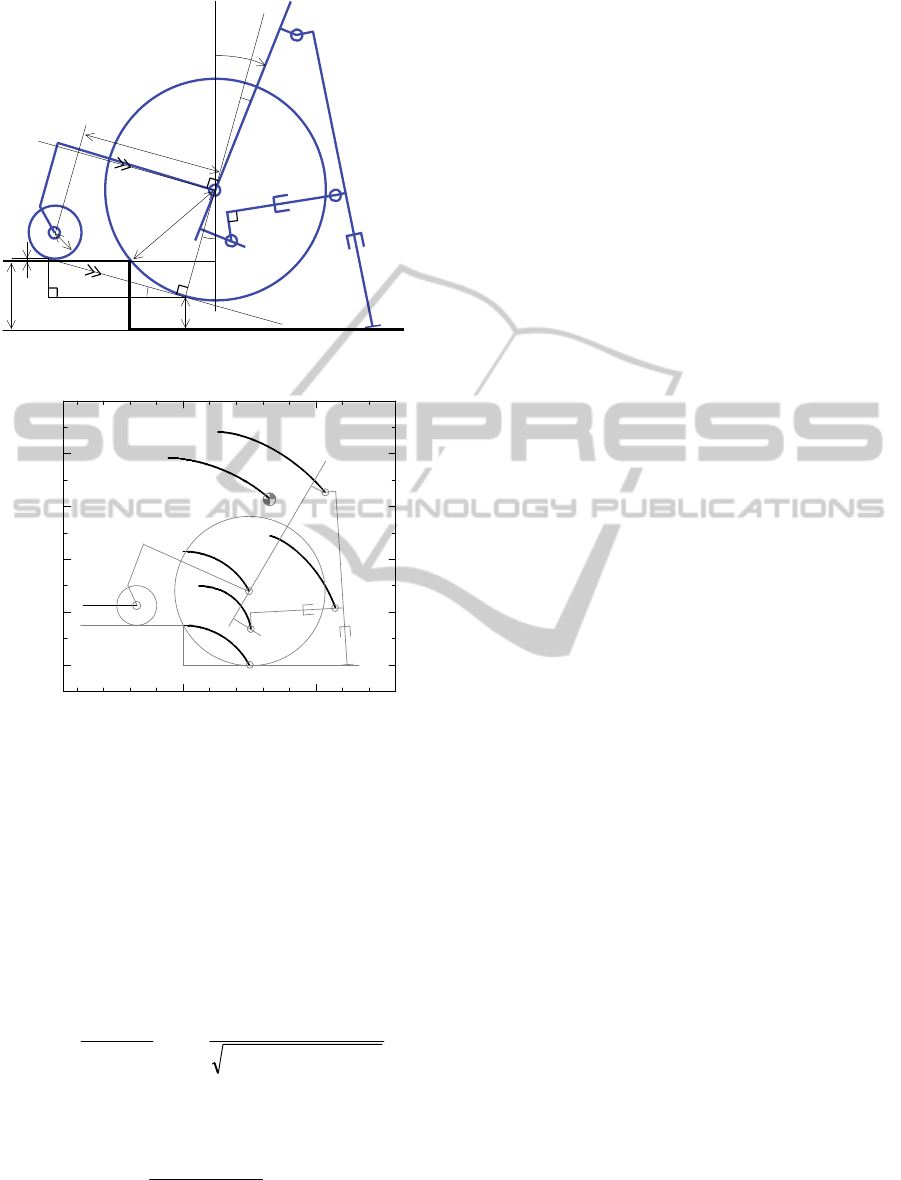
Figure 3: Model for generating trajectory.
Figure 4: Trajectory when climbing a step.
wm
xw
L
: constant distance between the wheel center of
the front caster and the rear wheel
H
: step height
: tilt angle of the wheelchair against the floor
: tilt angle of the backrest of the wheelchair
(constant)
In (1),
is derived as
2
21
2
21
1
21
1
)(
sintan
RRL
URRH
L
RR
wm
xw
y
wm
xw
(2)
where
U
y
is the y -coordinate of the coordinate
system
u
. From the following equations:
wm
xw
L
H
21
)(
sin
(3)
UR
y
)cos1(
11
(4)
)cos1(
22
R
(5)
Figure 4 presents results obtained for climbing up a
15-cm-high step from the position at which the rear
wheel contacts the floor to the position it reaches to
the top of the step, where
b
is the coordinate system
relative to the CoG including the total weight of the
system (wheelchair = 16.8 kg, step-climbing units =
5.8 kg, user = 55.0 kg). The described circular arcs
from each origin of the coordinate systems show the
appropriateness of the kinematics and trajectory
generation. The projected point of the CoG to the floor
exists in the supporting polygon between the rear
wheel and the contact point of the main link to the
floor from the initial period to the latter period of the
step-climbing motion. It exists between the front
caster and the rear wheel from the latter period through
the finish period.
4 HARDWARE
Figure 5 presents the appearance and inside
mechanisms of the step-climbing units. The main link
size is 12.0 (L) × 5.0 (W) × 65.5 (H, minimum length)
cm. That of the sub links is 30.2 (L, minimum length)
× 8.3 (W) × 10.0 (H) cm. The weight of the pair of
units is about 2.9 kg. A standard manual wheelchair
(16.8 kg; Nissin Medical Industries) is used for these
experiments.
The main link has one DC motor (RE-40, 70 W;
maxon motor) with a planet gear (reduction ratio =
1/5.8), an optical encoder (500 PPR), and a feed
screw (length = 46 cm, diameter = 10 mm, lead = 1.8
mm). The main link total length is 65.5 cm at its
shortest. Its extension length is 39.5 cm. A coupling
connects the feed screw with the motor. The fixed
part on the left of the coupling supports the force from
the feed screw to prevent an overload against the
motor. A thrust bearing between the feed screw and
the fixed part enables the feed screw to rotate
smoothly under a heavy load. The feed screw used in
this study has larger friction than a ball screw.
Therefore, although the former is unfavorable in
terms of transmission efficiency, it is safer: even if the
power source is cut off, the previous state is retained.
The sub link is located on each side of the
wheelchair using its tipping lever. The basic internal
structure is the same as that of the main link.
However, the motor is located parallel to the feed
screw using spur gears (reduction ratio = 1/3.375) to
design the link length as short.
wm
xw
L
m
2
R
1
H
w
u
1
R
2
w
u
0 50
0
20
40
60
80
100
Horizontal [cm]
Vertical [cm]
m
w
u
b
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
198
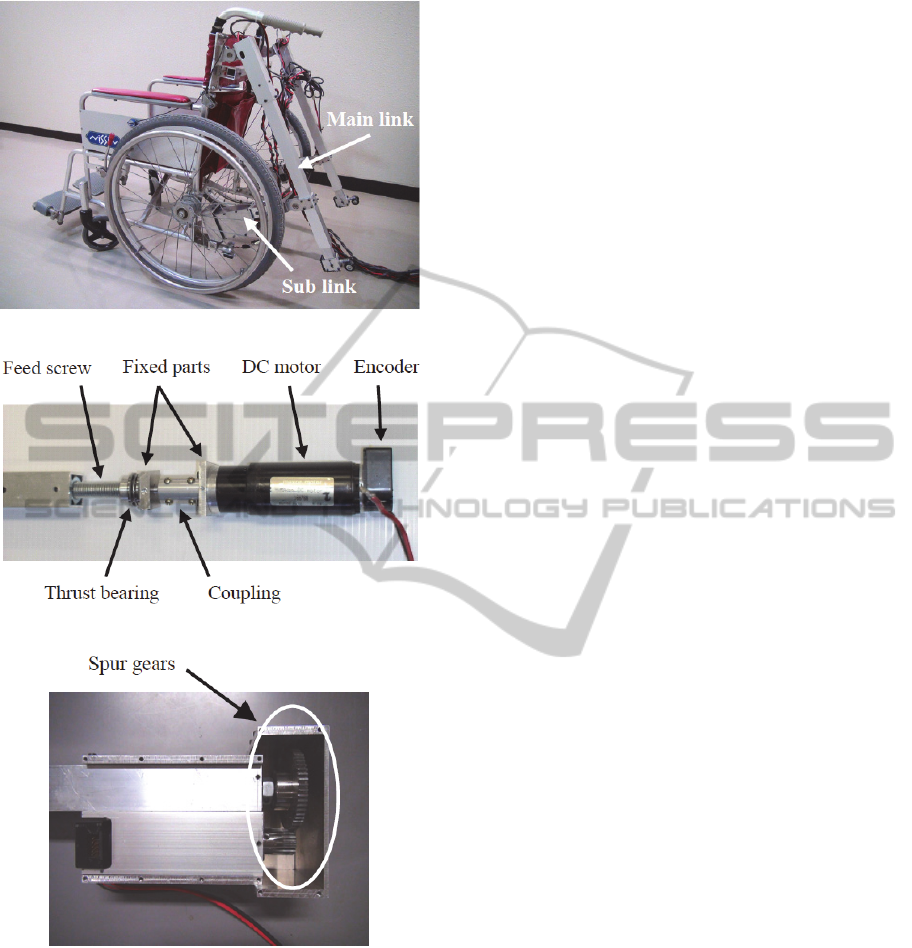
(a) Wheelchair with step-climbing units.
(b) Main link
(c) Sub link
Figure 5: Step-climbing units.
5 EXPERIMENTS
We next address the experimental results obtained
when climbing up and down a step. The subject was
a man with no leg motion impairment. His height was
158 cm. His weight was 55 kg. We measured the
wheelchair tilt angle using an inclinometer (NA4-70,
measuring range
70°, resolution <0.01°; Seika
Mikrosystemtechnik GmbH). Each link was
controlled based on PD control theory; the sampling
time was 5 ms. The step was made of concrete blocks
and a wooden board. Its height was 15 cm.
Experiments were conducted in an indoor
environment on a linoleum floor surface.
Figure 6 shows photographs taken when the
device was ascending a step. The sequence of this
motion is the following. The Greek characters of each
item given below correspond to those of the panel in
Figure 6.
(i) The user measured a step height and inputted the
data into the PC. Then the user approached the step as
shown in the snapshot.
(ii) The user lifted the front casters to the top of the
step independently, and went forward until the
back wheels touched the step. Then the main and
sub links were adjusted respectively to the initial
positions for this motion.
(iii) The main and sub links pushed the wheelchair
upward gradually.
(iv) The wheelchair was lifted on the top of the step
without any help from the user.
(v) The user went forward until the links did not
support the weight.
(vi) The links were then reset to the initial positions.
In (i), the subject measured the step height with a
measuring tape while seated on the wheelchair. In (ii),
it is true that the motion of lifting the front casters
requires some skill, but most wheelchair users have
already obtained such skills because they are
necessary for daily life. The subject, who is not a
wheelchair user, understood this motion after several
trials because the main links of this system prevented
him from falling backward. Each tip of the main links
slipped backward about 3 cm. The back wheels
stopped before about 6 cm from the target position in
the motions from (iii) to (iv). However, the subject
was able to reach the top of the step easily in (v).
Figure 7 shows the time response of the main and sub
links on the right side when climbing up the step. The
left side data were similar because the motion was
bilateral symmetry. The Greek characters in Figure 7
correspond to those in Figure 6. The time for control
started from (ii) with the following intervals: (ii) 0–
6.0 s, (iii) 6.0–7.9 s, (iv) 7.9–24.9, (v) 24.9–28.6 s,
and (vi)
28.6–44.6 s. The user pressed a push-button
to send the signal to the PC. It was pressed three times
in (ii), (iii) and (v). Figure 7(a) presents the time
response of the length of the main link. This result
shows that the main link can follow the target with the
maximum error of 8.0 mm (t=12.0 s). The sub link
also follows the target with the maximum error of
FeasibilityStudyofaPairof2-DOFStep-climbingUnitsforaManualWheelchairUser
199

Figure 6: Photographs showing step ascent.
1.3 mm (t=0.7–5.6 s, around 23.2 s) (see Figure 7(b)).
Figure 7(c) portrays the time response of the tilt angle
of the wheelchair. The broken line represents the
calculated values. We infer that the errors during
(iii)–(iv) occurred by the slips of the main links. The
large fluctuations during (iv)–(v) were generated
when the wheelchair went forward and stopped at the
top of the step. The tilt angle itself did not change in
that manner.
The subject followed the reverse procedure of the
climbing-up motion. Descending a step was
apparently more difficult than ascending it because of
the fear of falling. However, we confirmed that the
user was able to realize this motion stably with no
help because the main link stopped the wheelchair
from going backward.
We examined this system for use in outdoor
environments. As results of the examination using the
part of the main link removed from the system, less
slippage occurred on the asphalt surfaces, which are
the environments most likely for use, than on the
indoor linoleum surface. Even if a small amount of
sand was on the asphalt surface, the slippage
condition was almost the same because of the
roughness of the rubber surface of the main link tip.
On gravel or soft soil it was difficult to realize
ascending and descending motions because the main
link slipped or sank down. Next we discuss whether
the wheelchair can reach the top of the step or not.
The subject can climb up a step even though there was
about 1.2 cm height error. On flat ground, the
maximum step height he was able to climb
independently was about 5 cm. The user confirmed
the situation and was able to retry the task calmly after
changing the environment and the input value of the
step height because the wheelchair does not fall
backward in the cases that the rest height error
exceeds the limit or that the back wheel detaches from
the step.
(a) Time response of the length of the main link.
Figure 7: Results of step-ascent experiment.
0 10 20 30 40
0
20
40
60
Time [s]
Main link [cm]
Desired
Actual
(iv) (v)
(vi)
(ii)
(iii)
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
200
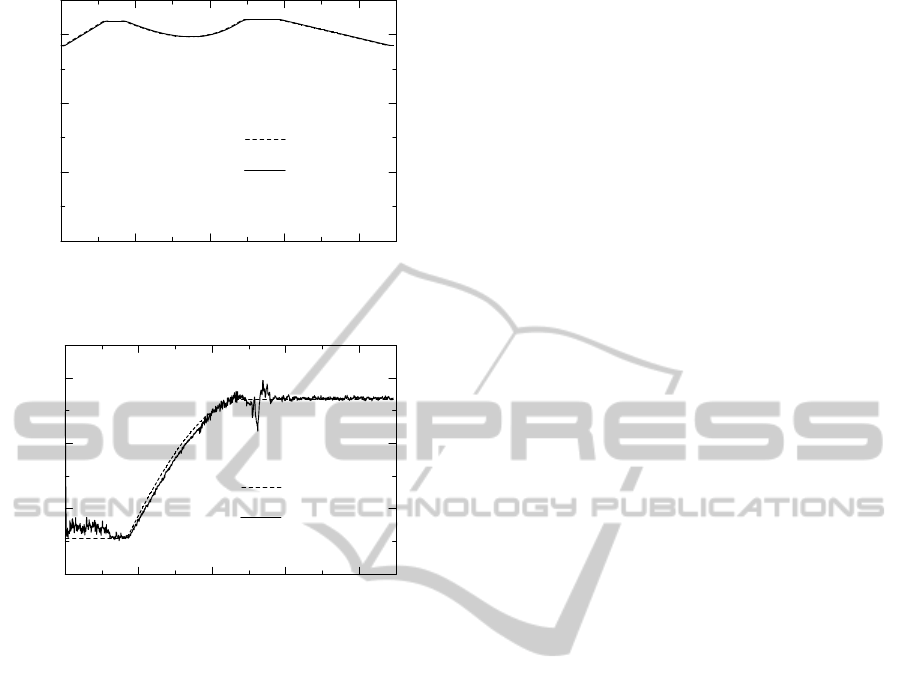
(b) Time response of the length of the sub link.
(c) Time response of the tilt angle of the wheel chair.
Figure 7: Results of step-ascent experiment (cont.).
6 CONCLUSIONS
We proposed a pair of step-climbing units for a
manual wheelchair user. This unit comprises links of
two types: a main link and a sub link. The former link
works for pushing up the wheelchair. The latter link
works for changing the angle of the main link. A pair
of the units is installed on the back frames of the
wheelchair. They prevent the user from falling
backward. The trajectory generation when climbing
up a step was presented. Using a pair of portable
slopes, we demonstrated that this system can ascend
and descend a 15-cm-step and that it can cope with
several steps. This system supports only 15-cm height
for a single step, but the maximum step height can
exceed 20 cm by redesigning the main link in the same
mechanism as the sub link. In addition, this system can
reduce ground slippage by improvement of the
mechanism, shape, and material of the tip of the main
link.
In future works, we plan to improve this system for
better practical use. We will attempt to use it in various
actual environments.
REFERENCES
Fang L, Lu T, He W, Yuan K. Dynamic and Tip-Over
Stability Analysis of A Planetary Wheeled Stair-
Climbing Wheelchair, Proc. of 2012 IEEE Int. Conf. on
Mechatronics and Automation, 2012, p. 2541-2546.
Independence Technology LLC, iBOT, 2015, https://
www.msu.edu/~luckie/segway/iBOT/iBOT.html
Lawn MJ, Ishimatsu T. Modeling of a stair-climbing
wheelchair mechanism with high single step capability,
IEEE Trans. on Neural systems and rehabilitation
engineering, Vol. 11, No. 3, 2003, p. 323-332.
Ministry of Health, Labour and Welfare, 2015,
http://www.mhlw.go.jp/toukei/saikin/hw/shintai/06/ind
ex.html (in Japanese).
Mori Y, Nagase K, Nakada A. Auxiliary Device for a
Wheelchair, Japanese Unexamined Patent Application
Publication, 2011, No. 2011-41670 (in Japanese).
Nabtesco Corp. J-MAX, 2015, http://www.nabtesco.com/
en/contribution/wheelchair.html (in Japanese).
TopChair, TopChair-S, 2015, http://www.topchair.fr/en.
Yokota S, Tanimoto H, Heguri J, Yamaguchi K, Chugo D,
Hashimoto H. Improvement of Assistive Wheelchair
Caster Unit for Step Climbing, The 21st IEEE
International Symposium on Robot and Human
Interactive Communication, 2012, p. 240-244.
0 10 20 30 40
0
10
20
30
Time [s]
Sub link [cm]
Desired
Actual
(iv) (v)
(vi)
(ii)
(iii)
0 10 20 30 40
-30
-20
-10
0
Time [s]
Tilt angle [deg]
Calculated
Actual
(iv)
(v) (vi)
(ii)
(iii)
FeasibilityStudyofaPairof2-DOFStep-climbingUnitsforaManualWheelchairUser
201
