
Diversifying TS using GA in Multi-agent System
for Solving Flexible Job Shop Problem
Ameni Azzouz, Meriem Ennigrou and Boutheina Jlifi
L. SOIE. Strat
´
egie d’Optimisation et Informatique IntelligentE , ISG, Institut Sup
´
erieur de Gestion,
Universit
´
e de Tunis, Tunis, Tunisie
Keywords:
Diversification, Tabu Search, Genetic Algorithm, Multi-agent System, Flexible Job Shop.
Abstract:
No doubt, the flexible job shop problem (FJSP) has an important significance in both fields of production man-
agement and combinatorial optimization. For this reason, FJSP continues to attract the interests of researchers
both in academia and industry. In this paper, we propose a new multi-agent model for FJSP. Our model is
based on cooperation between genetic algorithm (GA) and tabu search (TS). We used GA operators as a di-
versification technique in order to enhance the searching ability of TS. The computational results confirm that
our model MAS-GATS provides better solutions than other models.
1 INTRODUCTION
The Flexible Job Shop Problem is a generalization
of the classical Job Shop Scheduling Problem, where
each operation can be processed by more than one re-
source. Considering the flexibility constraints, FJSP
presents additional difficulty than the classical JSP
and requires more effective algorithms. In recent
decades, many attempts have been made to find the
near optimal solution of FJSP using a varied range
of tools and techniques such as Branch and Bound
(Fattahi et al., 2007; Zribi et al., 2007) at one hand
and Heuristics (Wang and Yu, 2010; Ziaee, 2014)
at the other hand. FJSP is known to be strongly
NP-hard (Garey et al., 1976). Consequently, most
of the literature related to the FJSP is based on
meta-heuristic methods like genetic algorithms (GAs)
(Pezzella et al., 2008; Zhang et al., 2011; Zhou et al.,
2013; Zambrano rey et al., 2014), particle swarm op-
timization (PSO)(Zhang et al., 2009; Nouiri et al.,
2015), simulated annealing (SA) (Najid et al., 2002;
Yazdani et al., 2009), tabu search (TS) (Vilcot and
Billaut, 2011; Brandimarte, 1993; Saidi-Mehrabad
and Fattahi, 2006), beam search (BS) (Wang et al.,
2008).
Nevertheless, most of the above-mentioned re-
search considered only one method optimization to
solve FJSP. However, the literature reviews show
that none of these methods are sufficient on their
own to solve this NP-hard problem. Hence, almost
of research considered hybridization between several
methods such as (Xia and Wu, 2005; Zhang et al.,
2008; Li et al., 2010a; Henchiri and Ennigrou, 2013).
The motivation behind such hybrid methods is usu-
ally to obtain a near optimal solution. In (Shao et al.,
2013), the authors propose a hybrid algorithm based
on discrete PSO used for global search and SA signif-
icant for local search. Differently, (Li et al., 2010b)
use the PSO to produce a swarm of high quality can-
didate solutions, and TS algorithm to find the near op-
timal solution around the given particle.
Generally, there are two main categories for hy-
bridization (Puchinger and Raidl, 2005): The first one
is the integrative combination in which one method is
used as a step in the second method such as (Azzouz
et al., 2012) which combine the GA and the TS for
solving FJSP. The second category is the collaborative
combination in which no algorithm is contained in the
other.Here, the algorithms are executed sequentially,
or in an intertwined or even parallel way. Our pro-
posed model, MAS-GATS, appears in this last class
in which tabu search and genetic algorithm collabo-
rate by exchanging its solutions (see section 3).
Furthermore, meta-heuristic approaches can be
easily trapped in local minima hence they need di-
versification strategies to generate solutions that dif-
fer from each other in significant ways in order to ex-
amine unvisited regions of the search solution space,
and that yield interesting alternatives in the context of
the problem considered (Glover, 1998). These strate-
gies are especially significant to the search process
that, starting from a particular point, explore a solu-
94
Azzouz A., Ennigrou M. and Jlifi B..
Diversifying TS using GA in Multi-agent System for Solving Flexible Job Shop Problem.
DOI: 10.5220/0005511000940101
In Proceedings of the 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2015), pages 94-101
ISBN: 978-989-758-122-9
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

tion path until new exploitable regions are inaccessi-
ble, and a new starting point becomes necessary(Kelly
et al., 1994).
Several diversification strategies are used in liter-
ature. For example, tabu search use memory list con-
taining the solutions or movements used frequently.
These latter will be penalized in order to not be vis-
ited during the diversification steps. Diversification in
GRASP (Greedy Randomized Adaptive Search Pro-
cedures) is achieved by means of controlled random
sampling. Simulated annealing incorporates random-
ization to make diversification a function of tempera-
ture, whose gradual reduction correspondingly dimin-
ishes the directional variation in the objective func-
tion trajectory of solutions generated (Glover and La-
guna, 1999). Genetic Algorithms use randomization
in component processes such as combining popula-
tion elements and applying selection, crossover and
mutation operators, thus providing some diversifying
power.
In this paper, we are interested for diversification
techniques used in tabu search. Ennigrou M. and
Ghdira K. (Ennigrou and Ghedira, 2008) show the ef-
fectiveness of three diversification techniques used in
order to enhance the searching ability of TS via multi-
agent system for solving flexible job shop problem:
the first consists in starting from a solution selected
randomly among its elite solution list (i.e. list con-
taining the best solutions) and non belonging to its
diversification tabu list (i.e. list containing the last
solutions used during the last diversification phases).
The second technique starts from a new solution cre-
ated by re-sequencing the operations of one job se-
lected randomly; the re-sequencing consists for each
operation of the job selected in choosing a potential
resource and fixing a start time equal to the finish time
of its predecessor. The third technique is to start again
TS for the local minima finding after a certain num-
ber of iterations. In (Laguna and Glover, 1993) fre-
quency counts are used to bias the selection of moves
in TS solution states where no improving moves are
available. Applied to single machine scheduling, the
frequency count is multiplied by a penalty parameter
and added to the move value of every non-improving
move. Then, the move with the least penalized move
value is selected.
In the recent decades, few approaches have used
GA operators in order to provide an approximate di-
versifying effect on local search algorithms. For ex-
ample, the basic algorithm of (Sohn et al., 2005) refer-
enced by RasID-GA (Adaptive Random Search with
Intensification and Diversification combined with Ge-
netic Algorithm) used Automatic switching: first, it
executes a number of RasIDs in parallel; then the tran-
sition from RasID to GA aiming to escape local min-
ima provided by RasID and finally the return to RasID
again.
In this paper, we propose, a new approach MAS-
GATS based on multi-agent system using two agent
classes: the first named Resource agents responsible
of local optimization process. The second named Su-
pervisor agent responsible of global optimization pro-
cess. This paper is organized as follows. Section 2
defines the flexible Job Shop. Section 3 describes our
proposed approach. Section 4 presents an empirical
evaluation of MAS-GATS. Finally, in section 5, we
conclude by discussing the considerable promise of
using our approach.
2 FLEXIBLE JOB SHOP
PROBLEM
The FJSP consists in performingn jobs on m ma-
chines. The set machines is noted M, M =
{M
1
, ..., M
m
}. Each job i consists of a sequence of
n
i
operations (routing). Each routing has to be per-
formed to complete a job. The execution of each op-
eration j of a job i (noted O
i j
) requires one machine
out of a set of given machines M. The problem is to
define a sequence of operations together with assign-
ment of start times and machines for each operation.
Assumptions considered in this paper are the fol-
lowing:
• jobs are independent of each other;
• machines are independent of each other;
• one machine can process at most one operation at
a time;
• no preemption is allowed.
• setup and transportation times are negligible
• all jobs are available at time zero.
The current FJSP based on these assumptions is
aimed to minimize the makespan, i.e., the maximal
completion time of machines or jobs. FJSP is clas-
sified as Total FJSP and Partial FJSP (Kacem et al.,
2002). In Total FJSP (T-FJSP), each operation can be
processes by all machines. However, in Partial FJSP
(P-FJSP), at least one operation may not be processed
on all machines. Several researches pointed out that
the P-FJSP is more complex as compared to T-FJSP
on the same scale. In this paper, we assume the P-
FJSP. Table 1 illustrates an example of P-FJSP with
four jobs and four machines. In the table, the symbol -
means that the machine can’t execute the correspond-
ing operation, i.e., it does not belong to the subset of
compatible machines for that operation.
DiversifyingTSusingGAinMulti-agentSystemforSolvingFlexibleJobShopProblem
95

Table 1: An instance of FJSP.
Job operation M1 M2 M3 M4
J
1
O
11
4 - 5 -
O
12
3 4 5
O
13
6 5 - 4
O
14
5 - 7 2
J
2
O
21
3 - 4 9
O
22
4 5 - -
O
23
- 4 7 3
O
24
7 2 4 -
J
3
O
31
5 3 - 4
O
32
- 4 - 5
O
33
4 5 3 3
O
34
- - 5 6
J
4
O
41
5 - 5 6
O
42
4 7 - 8
O
43
9 - 5 7
O
44
3 5 4 6
3 PROPOSED MODEL
The basic idea of our MAS-GATS model is to de-
sign: a set of Resource agents responsible of local
optimization using Tabu search; a Supervisor agent
which has two roles running simultaneously. The first
is global optimization based on GA and the second is
to improve the diversification in the TS. Each agent in
this model has its own acquaintances (the agents that
it knows and with which it can communicate), a local
memory composed of its static and dynamic knowl-
edge and a mailbox in which it stores the messages
received from the other agents. In the following, we
describe each agent class.
3.1 Resource Agent
This agent uses the tabu search method, which is a
local search based meta-heuristic. The latter consists
in exploring the search space composed of the set of
solutions in order to find the optimal one. More pre-
cisely, tabu search begins from an initial solution and
then chooses, at each iteration, the best solution in the
current neighbourhood, even if it does not improve the
quality of the current one. A neighbourhood is com-
posed of all the solutions obtained by a simple move
or transition on a solution. These solutions are named,
then, neighbours.
In order to escape local optima in which the sys-
tem can be easily trapped, tabu search uses a tempo-
rary me-morization structure in which it keeps track
of the last visited solutions by memorizing the last
moves performed: the tabu list. In fact, a tabu solu-
tion is forbidden during a number of iterations equal
to the tabu list size. Then, the best solution among the
ones not forbidden is selected for the next iteration.
Tabu search method has many parameters that have
to be defined such as the initial solution, neighbour-
hood function, evaluation technique, tabu list size and
diversification techniques. The TS parameters used
here is taken from (Ennigrou and Ghedira, 2008). Fig-
ure1 shows the global structure of tabu search used in
our proposed model.
Figure 1: Tabu Search.
Once the initial solution has been received from
the Supervisor agent, the local optimization phase be-
gins. The Resource agent determines, then, the neigh-
bourhood of the current solution and evaluates it in
order to choose the best non-tabu neighbour or the
best one which satisfies the aspiration criterion. Sub-
sequently, the move will be stored in the tabu list and
the new current solution is obtained after perform-
ing the move selected and after satisfying all problem
constraints. In the case that the new current solution
improves the best solution encountered so far, i.e. an
elite solution, the Resource agent sends it to the other
Resource agents in order to add it to their elite solu-
tion lists (it also stores it in its own elite solution list).
Simultaneously, elite solutions are sent also to the Su-
pervisor agent who keeps track of the best global so-
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
96

lution and executes a global optimization described in
the next subsection.
3.2 Supervisor Agent
Unlike the Resource agent, the Supervisor agent has
a global optimization process based on genetic al-
gorithm. Recently, genetic algorithms have become
increasingly to solving combinatorial optimization
problems. GA can find solutions using the mecha-
nism of biological heredity and selection (Holland,
1975). Moreover, GA is highly evaluated for search-
ing near optimal solutions. In the basic GA a popula-
tion composed of many individuals is generated ran-
domly. For a certain number of iteration a new pop-
ulation P(i+1) is generated by choosing individuals
from Pi as parents for the next generation, selecting
those parents or crossing them over, and possibly mu-
tating them. Slightly different, we present the scheme
of our proposed genetic algorithm in Figure2.
The initial population is generated by the multi-
agent dynamic described so far. After evaluating each
solution in the population, if the stop criterion is not
met, there are two choices. According to the proba-
bility PGen, the current individual executes crossover
operator or the mutation one. The stop criterion is that
the MaxIter is reached or the best makespan has not
been improved for a certain number of iteration.
In this section, we present our adaptation of the
different GA parameters to our problem and later the
core of global optimization.
Figure 2: Proposed Genetic Algorithm.
M1 M2 M3 M4
O
11
1 0 0 0
O
21
0 0 1 0
O
31
0 1 0 0
O
32
0 0 0 1
O
12
0 1 0 0
O
22
1 0 0 0
O
41
0 0 1 0
O
13
0 1 0 0
O
33
0 0 1 0
O
42
1 0 0 0
O
23
0 1 0 0
O
34
0 0 0 1
O
14
1 0 0 0
O
43
0 0 1 0
O
24
1 0 0 0
O
44
0 1 0 0
Figure 3: Chromosome representation.
3.2.1 Representation of Individuals
For solving FJSP by GA, the first step is to represent
a solution of a problem as a chromosome. In order
to improve the number of feasible solutions produced
after genetic recombination, we try to design an ef-
ficient coding of the individuals which respects the
most important constraints of our problem. Then, our
chromosome is designed as a binary matrix, where:
• The rows represent all operations of jobs. Fur-
thermore, the order in which they appear in the
chromosome describes the sequence of operations
present in the solution. solution
• The columns represent all machines.
Moreover, in our representation, we present a con-
straint described as follows:
m
∑
k=1
X
i jk
= 1 (1)
X
i jk
= 1 when O
i j
is assigned to resource m
k
X
i jk
= 0 otherwise.
Otherwise, the sum of each row is equal to one, be-
cause an operation must be assigned to only one ma-
chine. The order, in which the operations appear in
this representation, is found according to the start
times of the operations. When we have more than one
operation executed in the same time, we choose the
one which has the less number of resources. Figure3
shows an example of our individuals which represent
the solution figured in the Gantt chart in Figure4 and
also the data from Table1.
DiversifyingTSusingGAinMulti-agentSystemforSolvingFlexibleJobShopProblem
97

Figure 4: Gantt Chart of solution.
3.2.2 Selection
The selection phase aims to choose the chromosomes
for reproduction to create the next generation. In this
study, we adopt our selection operator. Four individ-
uals are randomly chosen from parent population and
the four objective values are compared to select the
best and the worst solution for reproduction.
3.2.3 Crossover operator
The goal of the crossover is to obtain better chro-
mosomes to improve the result by exchanging infor-
mation contained in the current good ones. In our
work, we have adopted the crossover operator order1
(Davis, 1985). The idea of this operator is as follows:
we randomly select two positions XP1 and XP2 in
Parent1. The middle part is copied to the offspring1.
The rest is filled from the parent2 starting with posi-
tion XP2 + 1 and jumping elements that are already
present in the offspring 1. The same steps are re-
peated for the second offspring by starting with the
Parent2. We adapted this crossover to our own coding
described above. To more explain the crossover oper-
ator, we present an example in Figure5. Note that in
this example, we take XP1 = 4 and XP2 =9.
3.2.4 Mutation
Mutation operator is used also to get a new individ-
ual having only one value different from an already
exist-ing one. In our work, we adopt intelligent mu-
tation proposed by (Pezzella et al., 2008)in which we
select an operation on the machine with the maximum
workload (i.e. the amount of work that a machine pro-
duces in a specified time period), and assign it to the
machine with the minimum workload if possible.
3.3 Global Dynamic Multi-agent
The global dynamic begins with sending the ini-
tial solution by the Supervisor agent to all Resource
agents. At this moment, the local optimization pro-
cesses based on TS are launched by each Resource
agent. Every time the Resource agent encounters an
elite solution, it sends it to the other Resource agents
and to the Supervisor agent.
After a certain number of iterations of local TSs,
the global optimization process begins by generating
the initial population of GA. The initial population
contains in addition to the elite solutions a number of
random solutions generated by the Supervisor agent.
After that, the crossover and the mutation operators
above described are executed as presented in Figure2.
Both global and local optimization processes are exe-
cuted simultaneously. In the case that the Supervisor
agent encounters a solution better than the best solu-
tion encountered so far, it sends it to the other Re-
source agents which add it to their elite solution lists
in order to be used eventually during their diversifica-
tion phase. The Resource agents still send their elite
solutions in order to add it to the current population
of GA. The Supervisor agent and the Resource agents
maintain cooperation until reaching stopping criteria.
This latter can be no improvement in certain number
of iterations or IterMax is reached.
4 COMPUTATIONAL RESULTS
In order to evaluate the performance of the proposed
model, this section describes the computational ex-
periments. Our proposed algorithm has been imple-
mented using the multi-agent platform JADE (Java
Agent DEvelopment framework) based on JAVA and
run on core2Duo, 2,6GHZ and 2GB RAM.
The benchmark problems used were the set in-
stances taken from:
• Brandimarte (Brandimarte, 1993) (BRdata). It
consists of 10 problems mk1mk10, where the jobs
range from 10 to 20 operations, machines from 6
to 15, operations for each job from 5 to 15.
• HUdata (Hurink et al., 1994): it composed of 3
problems (mt06, mt10, mt20) and 10 problems
named rdata (la01-la10) where the jobs range
from 6 to 15 ,machines from 5 to 10.
These well-known instance problems have been
used by many papers in the literature to benchmark
the proposed methods.
The performance of our algorithm is evaluated by
comparing with some recent algorithms in the liter-
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
98
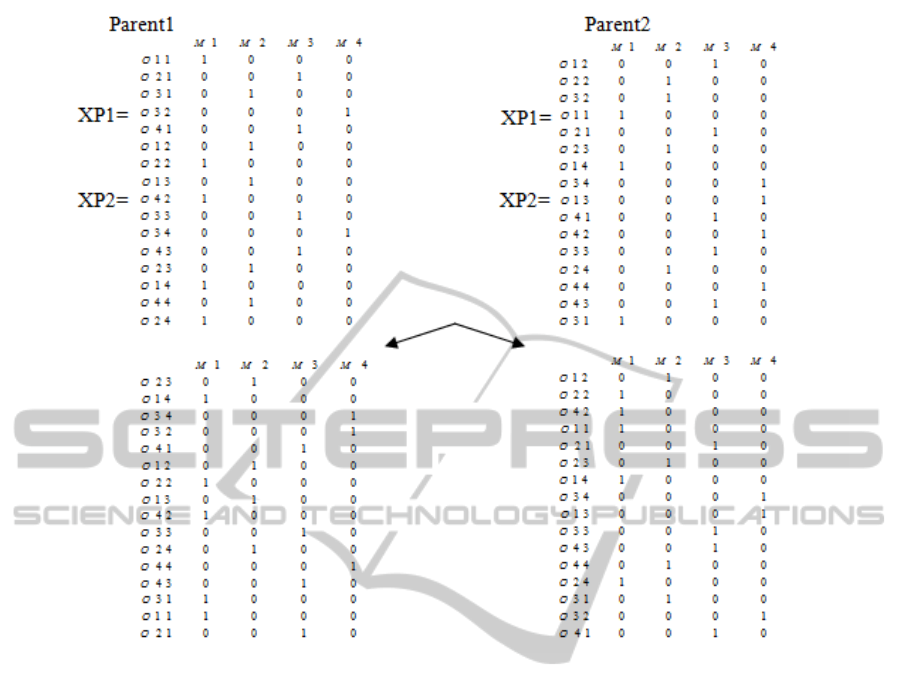
Figure 5: Crossover operator.
ature. The non-deterministic nature of our approach
makes it necessary to carry out multiple runs on the
same problem instance in order to obtain meaningful
results.
In our experiment, we tested different values for
a list of algorithm parameters, and computational ex-
perience proves that the following values are more ef-
fective:
• Tabu list size: 12;
• Number of generation of TS: 1000;
• Number iteration for diversification: 80;
• Population size: 800;
• P
Gen
: 0.7;
• Number of generation of GA: 800.
In Table2, P denotes the level of flexibility of the in-
stance problem. n × m denotes the problem scale (i.e.
n is the number of jobs, m is the number of machines.
(LB, UB) denotes the optimal makespan if known,
otherwise, the best lower and upper bound found to
date. We compare our proposed model MAS-GATS
with:
• FJSMATSLO+ proposed by (Ennigrou and
Ghedira, 2008) described in section 1,
• MAPSO proposed by (Nouiri et al., 2015) which
developed a PSO based multi-agents approach.,
• Heuristics based on a constructive procedure pro-
posed by (Ziaee, 2014),
It can be seen from Table2 that our MAS-GATS
outperforms FJS MATSLO+ in 8 out of 10 prob-
lems, Heuristic approach in 6 out of 10 problems and
MAPSO in 4 instance of problems. We also note that
all our results are located between the lower and up-
per bounds in all instances of (Brandimarte, 1993).
Our model has a better result for high level of flexi-
bility and high number of jobs such as MK03, MK07.
We confirm this remarks by the results presented in
table3. It is evident from this table that MAS-GATS
performed very well. Our results obtained are clearly
better than those obtained by FJS MATSLO+ model
in 85% of instances. Then, we can conclude that GA
operators are more efficient than other diversification
strategies. Likewise, it can be show that the coopera-
tion between GA and TS is more efficient than simply
TS. Therefore, the superior results indicate the suc-
cessful hybridization of GA and TS. This is due to
DiversifyingTSusingGAinMulti-agentSystemforSolvingFlexibleJobShopProblem
99

Table 2: Benchmarks of Brandimarte (Brandimarte, 1993).
Instance P n × m (LB, UB) FJSMATSLO+ MAPSO Heuristic MAS-GATS
MK01 2 10 × 6 36 ,42 40 41 42 39
MK02 3.5 10 × 6 24,32 32 26 28 28
MK03 3 15 × 8 204 ,211 207 207 204 204
MK04 2 15 × 8 48,81 67 65 75 67
MK05 1.5 15 × 4 168,186 188 171 179 176
MK06 3 10 × 15 33,86 85 61 69 75
MK07 3 20 × 5 133,157 154 173 149 148
MK08 1.5 20 × 10 523 523 523 555 523
MK09 3 20 × 10 299,369 437 307 342 341
MK10 1.5 20 × 15 165,296 380 312 242 264
Table 3: Benchmarks of HUdata de (Hurink et al., 1994) rdata.
Benchmarks P n × m (LB, UB) FJS MATSLO+ MAS-GATS
mt06 2 6 × 6 47 47 47
mt10 2 10 × 10 (679, 686) 724 729
mt20 2 20 × 5 (1022, 1024) 1036 1036
la01 2 10 × 5 (570, 574) 590 570
la02 2 10 × 5 (529, 532) 543 540
la03 2 10 × 5 (477,479) 480 485
la04 2 10 × 5 (502, 504) 524 514
la05 2 10 × 5 (457, 458) 464 463
la06 2 15 × 5 (799,800) 806 805
la07 2 15 × 5 (746, 750) 765 754
la08 2 15 × 5 (765, 767) 775 770
la09 2 15 × 5 (853, 854) 867 858
la10 2 15 × 5 (804, 805) 811 807
the fact that TS has facilitated a better exploitation of
the search space whereas GA has facilitated a better
exploration of it.
5 CONCLUSIONS
This work combines two optimization approaches in
order to get an optimal solution to FJSP: Local op-
timization approach based on tabu search cooperates
with global optimization approach based on genetic
algorithm in order to improve the searching ability in
terms of obtaining a solution as near as possible from
the global optimum. A multi-agent approach is pro-
posed in this context to ensure the relation between
the two different approaches. In future work, it will
be interesting to investigate the dynamic scheduling
problem to closely reflect the real job shop schedul-
ing environment.
REFERENCES
Azzouz, A., Ennigrou, M., Jlifi, B., and Ghedira, K. (2012).
Combining tabu search and genetic algorithm in a
multi-agent system for solving flexible job shop prob-
lem. In 11th Mexican International Conference on Ar-
tificial Intelligence (MICAI)pp. 8388.
Brandimarte, P. (1993). Routing and scheduling in a flex-
ible job shop by tabu search. In Journal Annals of
Operations Research 22: 158-183.
Davis, L. (1985). Applying adaptive algorithms to epistatic
domains. In In Proc. International Joint Conference
on Artificial Intelligence.
Ennigrou, M. and Ghedira, K. (2008). New local diver-
sification techniques for flexible job shop schedul-
ing problem with a multi-agent approach. In In Au-
tonomous Agents and Multi-Agent Systems, vol17(2),
270-287.
Fattahi, P., Mohamed, s.-M., and Fariborz, J. (2007). Math-
ematical modeling and heuristic approaches to flexible
job shop scheduling problems. In Journal of intelli-
gent manufacturing18(3) 331-342.
Garey, M., Johnson, D., and Sethi, R. (1976). The com-
plexity of flow shop and job-shop scheduling. In Math
Oper Res 1(2): 117129.
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
100

Glover, F. (1998). A template for scatter search and path
relinking. In In Artificial Evolution. Lecture Notes in
Computer Science Volume 1363,1-51.
Glover, F. and Laguna, M. (1999). Tabu search. Handbook
of Combinatorial Optimization 2093-2229.
Henchiri, A. and Ennigrou, M. (2013). Particle swarm op-
timization combined with tabu search in a multi-agent
model for flexible job shop problem. In In Advances
in Swarm Intelligence (pp. 385-394). Springer Berlin
Heidelberg.
Holland, J. H. (1975). Adaptation in natural and artificial
systems: An introductory analysis with applications to
biology, control, and artificial intelligence. U Michi-
gan Press.
Hurink, J., Jurisch, B., and Thole, M. (1994). Tabu
search for the job shop scheduling problem with
multi-purpose machines. In Operations-Research-
Spektrum,15(4):205-215.
Kacem, I., Hammadi, S., and Borne, P. (2002). Approach by
localization and multiobjective evolutionary optimiza-
tion for flexible job-shop scheduling problems. In Syst
IEEE Syst Man Cybern 32(1) 113.
Kelly, J. P., Lagunat, T. M., and Glover, F. (1994). A
study of diversification strategies for the quadratic as-
signment problem. In Computers and Operations Re-
search, 21(8), 885-893.
Laguna, M. and Glover, F. (1993). Integrating target analy-
sis and tabu search for improved scheduling systems.
In In Experts Systems Applic. 6 287-297.
Li, J.-Q., Pan, Q.-K., Suganthan, P., and Chua, T. (2010a). A
hybrid tabu search algorithm with an efficient neigh-
borhood structure for the flexible job shop scheduling
problem. In The international journal of advanced
manufacturing technology 52(58) 683697.
Li, J.-Q., Pan, Q.-K., Xie, S.-X., Jia, B.-X., and Wang, Y.-
T. (2010b). A hybrid particle swarm optimization and
tabu search algorithm for flexible job-shop scheduling
problem. In International Journal of Computer The-
ory and Engineering 2(2) 17938201.
Najid, N., Dauzere-Peres, S., and Zaidat, A. (2002). A mod-
ified simulated annealing method for flexible job shop
scheduling problem. In In proceedings of the IEEE In-
ternational Conference on Systems, Man and Cyber-
netics, Vol.5, 6-9.
Nouiri, M., Bekrar, A., Jemai, A., Niar, S., and Ammari,
A. C. (2015). An effective and distributed particle
swarm optimization algorithm for flexible job-shop
scheduling problem. In Journal of Intelligent Man-
ufacturing, 1-13.
Pezzella, F., Morganti, G., and Ciaschetti, G. (2008). A
genetic algorithm for the flexible job-shop scheduling
problem. In In Proc. International Joint Conference
on Artificial Intelligence. Computers and Operations
Research, 35(10) 3202-3212.
Puchinger, J. and Raidl, G. (2005). Combining metaheuris-
tics and exact algorithms in combinatorial optimiza-
tion: A survey and classication. In In Proceedings of
the First International Work-Conference on the Inter-
play Between Natural and Articial Computation, Part
II. Volume 3562 of LNCS., Springer 4153.
Saidi-Mehrabad, M. and Fattahi, P. (2006). Flexible job
shop scheduling with tabu search algorithms. In
The international journal of Advanced Manufacturing
technology , (32) 563-570.
Shao, X. Y., Liu, W. Q., Liu, Q., and Y., Z. C. (2013). Hy-
brid discrete particle swarm optimization for multi-
objective flexible job-shop scheduling problem. In
The International Journal of Advanced Manufactur-
ing Technology, vol. 67, no. 912, 28852901.
Sohn, D., Hirasawa, K., and Hu, J. (2005). Adaptive
random search with intensification and diversification
combined with genetic algorithm. In In Proc. of
the congress on evolutionary computation (CEC05),
1462-1469.
Vilcot, G. and Billaut, J. C. (2011). A tabu search algorithm
for solving a multicriteria flexible job shop schedul-
ing problem. In International Journal of Production
Research. Vol. 49, Iss. 23: 6963-6980.
Wang, S. and Yu, J. (2010). An effective heuristic for flex-
ible job-shop scheduling problem with maintenance
activities. In Computers and Industrial Engineering
(59) 436447.
Wang, S., Zhou, B., and Xi, L. (2008). A filtered-beam-
search-based algorithm for flexible job-shop schedul-
ing problem. In International Journal of Production
Research, 46 (11) 30273058.
Xia, W. and Wu, Z. (2005). An effective hybrid optimiza-
tion approach for multi-objective flexible job-shop
scheduling problems. In Computers and industrial
Engineering 48(2) 409-425.
Yazdani, M., Gholami, M., Zandieh, M., and M., M. (2009).
A simulated annealing algorithm for flexible job-shop
scheduling problem. In Journal of Applied Sciences,
9. 662-670.
Zambrano rey, G., Bekrar, A., Prabhu, V., and Trente-
saux, D. (2014). Coupling a genetic algorithm with
the distributed arrival-time control for the jit dynamic
scheduling of flexible job-shops. In International
Journal of Production Research, 52(12), 36883709.
Zhang, G., Liang, G., and Yang, S. (2011). An effective
genetic algorithm for the flexible job-shop scheduling
problem. In Expert Syst. Appl. 38(4) 3563-3573.
Zhang, G., Shao, X., Li, P., and Gao., L. (2009). An effec-
tive hybrid particle swarm optimization algorithm for
multi-objective flexible job-shop scheduling problem.
In Computers and Industrial Engineering. Volume 56,
Issue 4. 13091318.
Zhang, G., Shi, Y., and Gao, L. (2008). A genetic algorithm
and tabu search for solving flexible job shop sched-
ules. In International Symposium on Computational
Intelligence and Design.
Zhou, W., Yan-ping, B., and Ye-qing, Z. (2013). An im-
proved genetic algorithm for solving flexible job shop
scheduling problem. In 25th Chinese on Control and
Decision Conference (CCDC), page(s): 4553 4558.
Ziaee, M. (2014). A heuristic algorithm for solving flexi-
ble job shop scheduling problem. In Int Adv Manuf
Technol 71: 519528.
Zribi, N., Kacem, I., El Kamel, A., and Borne, P. (2007).
Assignment and scheduling in flexible job-shops by
hierarchical optimization. In Systems, Man, and Cy-
bernetics, Part C: Applications and Reviews, IEEE
Transactions, Issue: (4) 652 661.
DiversifyingTSusingGAinMulti-agentSystemforSolvingFlexibleJobShopProblem
101
