
Cooperative Self-optimisation of Network Protocol Parameters
at Runtime
Sven Tomforde
1
, Jan Kantert
2
, Sebastian von Mammen
1
and J
¨
org H
¨
ahner
1
1
Organic Computing Group, University of Augsburg, Eichleitnerstr. 30, 86159, Augsburg, Germany
2
SRA Group, Leibniz Universi
¨
at Hannover, Appelstr. 4, 30167, Hannover, Germany
Keywords:
Organic Computing, Intelligent System Control, Evolutionary Algorithms, Collaboration, End-to-End
Communication.
Abstract:
Network protocols are deployed in highly dynamic environments, but typically configured with a static setup
of configurations. The Organic Network Control system (ONC) has been developed to alter protocol con-
figurations at runtime. ONC is equipped with online learning capabilities and safety considerations. This
paper presents a first TCP-based study on how this approach can be applied to end-to-end protocols and si-
multaneously alleviating the drawbacks of a simulation-based optimisation procedure. The paper explains the
developed algorithm and demonstrates the benefit of the solution in an Omnet++ scenario.
1 INTRODUCTION
Large-scale data communication networks – such as
the Internet – have experienced a dramatically in-
creasing volume of data within the last decade. As a
result, great efforts have been made towards improv-
ing the performance of the utilised protocols. Simul-
taneously, more efficient technologies have been in-
vestigated. One approach that researchers have fol-
lowed is context-aware adaptation of protocols and
their parameter configurations. The basic idea is
to introduce “life-like” properties in communication
– meaning that self-adaptation and learning compo-
nents allow for highly robust and evolving solutions.
Previous work introduced the Organic Network
Control (ONC) approach (Tomforde and H
¨
ahner,
2011), which adapts protocol parameter settings dy-
namically and without the need of human interven-
tion. ONC works well for protocols with a local im-
pact, e.g., mobile ad-hoc networks, which is caused
by pure local knowledge and decisions. In order to
shift the focus towards system-wide decisions, we
introduce a novel concept to cooperatively optimise
these parameters. To this end, we discuss a first TCP-
based study and evaluate the benefits of the solutions.
The remainder of this paper is organised as fol-
lows. Section 2 describes ONC and related work. Af-
terwards, the novel cooperative approach to replace
ONC’s rule-generation component is introduced, ex-
emplarily showing adaptation of TCP/IP parameters
(Section 3). We discuss our experimental results in
Section 4. Finally, Section 5 summarises the paper
and gives an outlook to future work.
2 STATE OF THE ART
In this section, we first outline the workings of ONC.
Second, we reference the amalgamation of its under-
lying mechanisms and inspirations.
2.1 Organic Network Control (ONC)
The goal of ONC is the integration of Organic
Computing (OC) (M
¨
uller-Schloer, 2004) principles
into existing network protocols, including self-
organisation, self-optimisation, adaptivity, and ro-
bustness. ONC achieves this goal by automatic adap-
tation of network protocol parameters to environmen-
tal conditions. Thus, ONC strongly deviates from
most established protocol implementations that main-
tain constant values for the respective parameters.
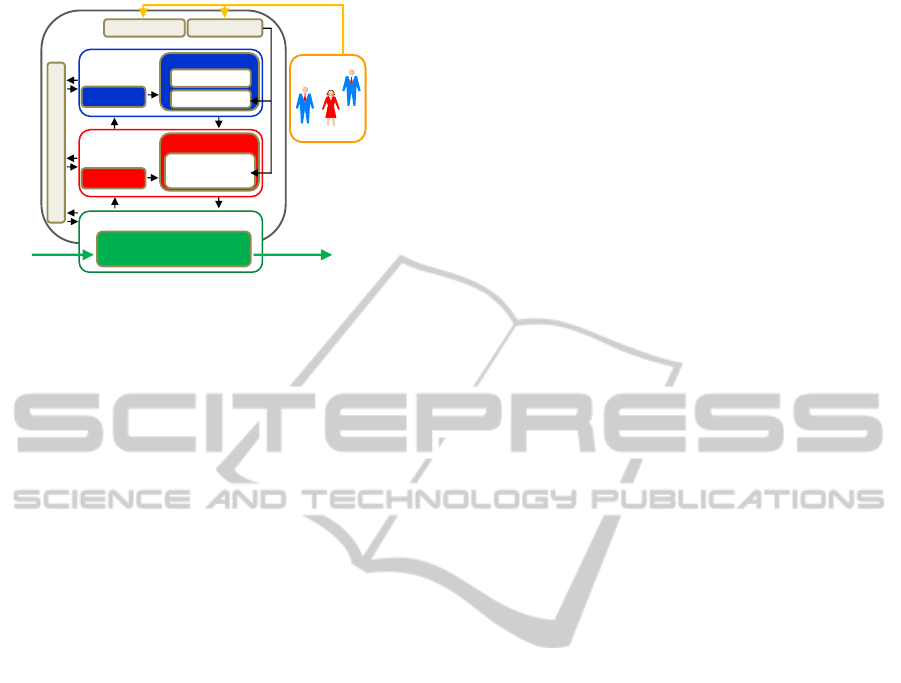
Figure 1 shows the layout of an OC architec-
ture, i.e. the Multi-Layer Observer/Controller archi-
tecture (Tomforde et al., 2011b). In the context of
the ONC system, the System under Observation and
Control (SuOC) at Layer 0 represents one individual
network protocol instance that runs on a particular
host. Layer 1 contains an observer and a controller
123
Tomforde S., Kantert J., von Mammen S. and Hähner J..
Cooperative Self-optimisation of Network Protocol Parameters at Runtime.
DOI: 10.5220/0005520701230130
In Proceedings of the 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2015), pages 123-130
ISBN: 978-989-758-122-9
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
Layer 3
Layer 0
User
System under Observation
and Control (SuOC)
Layer 1
Parameter Selection
Observer
Controller
Learning
Component
Layer 2
Offline Learning
Observer
Controller
Simulator
Opt. heuristic
Collaboration Mechanisms
Monitoring Goal Mgmt.
Figure 1: Multi-layered Observer-Controller Architecture.
component. The observer component is responsible
for monitoring the SuOC’s status and its environment
and generates a situation description from the current
observations. This is passed to the controller com-
ponent. Based on this data, the controller decides
whether and which changes should be introduced into
the system. In addition, the current system description
is used to reward any previous decisions’ successes
or to punish their failures, respectively. Making the
right decisions and reinforcing the knowledge-base is
typically realised by a modified Learning Classifier
System, see (Prothmann et al., 2008). Due to safety
and performance reasons, the online learning system
is not allowed to generate novel behaviour – instead,
it works on existing rules. In case of missing knowl-
edge, i.e. if no decision can be made regarding the cur-
rent situation, new rules are generated by Layer 2. In
particular, it finds the best possible action for a given
situation by means of a simulator and an according
optimisation component. Finally, Layer 3 provides an
interface to the user and to neighbouring systems.
ONC has been applied to different types of net-
work protocols, including reliable broadcast algo-
rithms for mobile ad-hoc networks (Tomforde et al.,
2011a), mode-selection protocols for wireless sensor
networks (Tomforde et al., 2010), and Peer-to-Peer
protocols (Tomforde and H
¨
ahner, 2011).
2.2 Related Work
ONC is a representative of decentralised approaches
to adapt network protocols. Several related ap-
proaches can be found in the literature that are specific
to certain protocol implementations, whereas ONC
is applicable to network protocols with variable pa-
rameters in general. For instance, Su et al. describe
a mobility-adaptive self-parametrisation of different
unicast and multicast routing protocols in the MANet-
domain – depending on a positioning system. Boleng
determines mobility by locally analysing the observed
neighbourhood. Considering the average link du-
ration as mobility metric, he uses the received val-
ues to control data routing in the so-called Adaptive
Location Aided Routing from Mines protocol. Fi-
nally, Stanze et al. describe a system for mobility-
adaptive self-parametrisation of a routing protocol in
MANets. To this end, they measure mobility by us-
ing the MANET Relative Velocity Indicator protocol.
These approaches are only feasible in the MANet-
domain as they work directly on the mobility aspect.
Further concepts for self-configuration are already
considered in the design of protocols. Examples
are the congestion avoidance mechanisms in TCP
(Martin et al., 2003) and the collision detection for
Ethernet-protocols (Kleinrock and A.Tobagi, 1975).
Considering adaptivity aspects within the protocol
logic has drawbacks: The logic has to be changed
and a cooperation with standard non-adaptable pro-
tocols might not be possible (besides further aspects
such as limited re-usability, limitation to only one pur-
pose). Again, this results in problem- and protocol-
specific solutions without the possibility of a gen-
eralised approach. The self-configuring approaches
outlined above have in common that individual net-
work nodes can adapt based on locally available
information. In contrast to such decentralised ap-
proaches, systems have been investigated where one
central, network-wide instance concerts parameter
changes. The most prominent examples have been
presented by Ye et al. (Ye and Kalyanaraman, 2004)
and Georganopoulos and Lewis (Georganopoulos and
Lewis, 2007). Closely related is the concept of pro-
tocol stack composition, which aims at providing a
more general solution to adapting protocol parame-
ters. Instead of interfering with the protocol logic,
protocol stack composition allows to switch between
protocols and stacks dynamically (Rosa et al., 1997).
Several different systems have been developed – pop-
ular representatives are Appia (Miranda et al., 2001)
and Horus (van Renesse et al., 1996). Here, protocols
with static settings are selected on demand from a pre-
defined set of solutions without any chance to extend
it at runtime. Furthermore, they rely on a centralised
element to observe and, if need be, reconfigure the
protocol stack for the whole network. Due to central-
isation, challenges arise such as additional bandwidth
usage and a single point of failure.
3 COOPERATIVE PARAMETER
OPTIMISATION
The ONC approach as introduced in Section 2.1
works well for protocols with a local impact. In
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
124

particular, this means that altering protocol parame-
ters has mainly a local focus, which is e.g. the case
for MANet protocols. Besides the potential benefit
demonstrated in previous work (see e.g. (Tomforde
and H
¨
ahner, 2011; Tomforde et al., 2010)), the con-
cept has drawbacks that restrict its applicability. For
instance, we rely on the existence of a simulation
model that a) approximates reality very accurate and
b) models the behaviour independently of all other
nodes in the network. Especially for protocol al-
gorithms that have more than just a local influence,
the simulation-based rule-generation approach is lim-
ited in finding the desired behaviour. One example
of previous work, where such a drawback has been
observed is the control of the Peer-to-Peer client Bit-
Torrent (Tomforde and H
¨
ahner, 2011). Besides these
concept-inherent limitations, processing time is an-
other drawback. Simulation-based optimisation ap-
proaches are time-consuming.
In general, there are two different approaches to
counter these limitations. The first is the pure ma-
chine learning idea: Neglecting safety considerations,
one could deactivate the Layer 2-based rule genera-
tion and equip Layer 1 with an exploration mecha-
nisms. In particular, the Learning Classifier System
of Layer 1’s controller could be implemented as a
standard eXtended Classifier System (XCS) (Wilson,
1995). Besides the safety-aspects, this approach is
problematic due to the extremely long convergence
durations. Additionally, bad protocol parameter set-
tings (i.e. a result of machine learning) affect the com-
munication ability in such a way that the system might
get trapped in a non-communicating state. As a result
of these consideration, such a solution is not feasible.
The alternative is to replace the simulation-based
solution by other mechanisms. Since simple con-
cepts such as approximation or computation of op-
timal settings are not available for network parame-
ter estimation, we replaced the simulation-based rule-
generation by a context-dependent cooperative solu-
tion. The idea is to get rid of the simulation model
and try possible behaviour directly in the real system
– but still consider safety.
3.1 Modification of the ONC
Architecture
In general, there is significant work available on opti-
mising TCP parameters and techniques. For instance,
Nichols and Jacobsen summarise a set of solutions for
most of the current TCP problems (Nichols and Ja-
cobson, 2014). Furthermore, Dukkipati et al. already
presented a solution for TCP’s “slow-start” problem,
which is also addressed by our approach (Dukkipati
et al., 2010). Within this paper, TCP serves as an ex-
ample for connection-oriented protocols and conse-
quently as use case for out experiments. The general
idea is transferable to similar protocols – we therefore
neglect a deeper comparison with comparable TCP
modifications.
Layer 0: In order to be able to adapt the TCP/IP host
to changing conditions, Layer 0 needs the possibility
to access variable parameters and to monitor the cur-
rent situations. According interfaces have been im-
plemented. Details on implementation parameters are
given in the context of the simulator (see Section 3.3).
Layer 1: The parameter configuration loop of Layer 1
consists of an observer and a controller component.
The observer derives a situation description from the
SuOC’s accessible attributes. In the TCP/IP setting,
we use the following situation description:
1. The (averaged) duration of a TCP connection
from or to this host.
2. The (averaged) number of TCP connections that
are open simultaneously.
3. The (averaged) round-trip time per packet.
4. The particular physical medium used as basis for
the communication (e.g. WiFi or Ethernet).
5. The maximum transmission rate for the current
connection (e.g. 100Mbit/s).
Based on this situation description, the controller
performs two tasks: a) evaluate the success of the
last action and b) choose the next action. We imple-
mented Layer 1’s controller as a modified variant of
Wilson’s eXtended Classifier System (Wilson, 1995)
(see (Prothmann et al., 2008) for details). We measure
the system’s performance as the throughput without
overhead (“goodput”). I.e., we measure the round-trip
time of packets and estimate the throughput based on
the packet size and the considered period. From this
accumulated value we subtract the overhead.
In order to have a normalised reference value, we
calculate the round-trip time as given by Equation 1.
Thereby, the abbreviation RTT specifies the (aver-
aged) round-trip time – the index c refers to the cur-
rently observed one, max to the maximal observed
one, min to the minimal observed, and n to the (fi-
nally) normalised value. As a result of this normalisa-
tion, RTT
n
is within the interval [0, 1]. In addition, the
actual value within this range is adapted in relation to
the possible value for maximum and minimum.
RT T
n
= 1 −
(RT T
c
−RT T
min
)
(RT T
max
−RT T
min
)
(1)
Layer 2: The most important modifications to ONC
are concerned with the rule-generation component.
Again, this component consists of an observer and
a controller part. In case of periods of inactivity or
low resource utilisation, parts of the bandwidth can
CooperativeSelf-optimisationofNetworkProtocolParametersatRuntime
125

be used to cooperatively optimise parameter settings.
This is the task of the observer-controller tandem on
Layer 2. In contrast to the previous architecture as de-
picted in Figure 1, no simulation tool is available nor
necessary, and it is therefore replaced by a component
that is responsible for: a) finding cooperation part-
ners, b) generating (test) traffic to utilise the band-
width, and c) cooperatively optimising the parameter
settings for both ends of the TCP connection using a
heuristic. For part c), the same optimisation approach
as used for ONC’s Layer 2 (see Section 2.1) can be
applied. The other two aspect are described in detail
in the next subsection.
Layer 3: The third layer of the architecture encap-
sulates the collaboration and cooperation with other
entities, as well as with the user. It maintains and up-
dates a list about available neighbours. This list serves
as set of potential cooperation partners. Details are
given in the remainder of this section.
3.2 Cooperative Self-optimisation of
Protocol Parameters
Our proposed self-optimisation approach consists of
two parts: a) identify cooperation partners and estab-
lish a test-connection with adaptable TCP parameters
(this assumes that all hosts run the same TCP imple-
mentation and access the same parameters using the
same names), and b) find the best setting for the spec-
ified conditions.
a) Cooperation Partners: Hosts are assumed to
be aware of other hosts within their vicinities – e.g.
due to observing addresses in TCP packets transmit-
ted over the physical medium. Hence, each host main-
tains a list of potential cooperation partners. Can-
didate partners have to be selected from this set.
Thereby, different strategies are possible, e.g.: a) a
random selection, b) the last communication partners
of TCP connections established by or to the specific
host, c) hosts that will most probably be the next
communication partners, and d) hosts that exhibited
bad/good RTTs in the past. We decide to keep the
approach as simple as possible and therefore choose
random selection. In addition, two restrictions have
to be considered: 1) the candidate partner does not
run an ONC module and 2) the candidate partner re-
fuses to cooperate (e.g. due to over-utilisation). Both
restrictions are covered by introducing a time-out and
then starting the selection process again. Those not
answering are further put on a blacklist.
b) Optimisation Process: After selecting part-
ners, the cooperative testing of parameter settings is
initialised. We distinguish between an active and a
passive role: The requesting host is active and there-
fore responsible to generate candidate parameter set-
tings and set up test traffic. The other cooperation
partner is passive and applies the requested parame-
ters for a given time interval. During this period, it
accepts the incoming TCP connections of the active
host, accepts the data (and deletes it), and observes
the situation. Within such an evaluation cycle, one pa-
rameter set can be evaluated by the active host. This
loop – testing a variety of candidate parameter sets –
is processed until a stop criterion is reached (i.e. num-
ber of maximum cycles or no improvement for a spe-
cific number of cycles). In order to generate candidate
parameter sets to be tested, we used an Evolutionary
Algorithm working on a bit string representation. As
test data, we use a randomised html-traffic generator
as available in the simulator and configure it with the
requested conditions (i.e. number of open TCP con-
nections, available bandwidth, etc).
The bit string encoding the candidate solution
consists of the 10 parameters listed in Table 1.
Thereby, the ordering in the string reflects the order-
ing in the table and the number of bits used per param-
eter is given in the third column. Based on this string,
the genetic operators I) selection, II) crossover, and
III) mutation are applied. For I), we use a probability-
based selection of candidates within the population
(meaning from the set of known rules). The proba-
bility of becoming a parent becomes higher with in-
creasing performance. The second aspect – cross-over
– decides how the new candidate is generated: either
by combining the two selected parents or randomly.
Typically, EAs are configured with a high cross-over
probability (meaning to utilise selection). Therefore,
we set this parameter to 0.95. The operator splits both
bit strings of the parents at one (randomly chosen)
point and recombines them while switching the ends
(one-point-cross-over). Alternatives include variants
of two- and more-point cross-over. Finally, additional
randomness comes in with the mutation parameter
(III). Mutation introduces more exploration capabil-
ities, but high probabilities will mislead the process
towards random search behaviour. Hence, the muta-
tion probability is set to a low value (i.e. 0.1).
c) Optimisation Protocol: Standardised TCP
messages specifying the request for cooperation, the
acknowledgement/reject, and the transmission of the
candidate parameter sets have been defined to allow
the possible partners to understand each other.
3.3 Implementation in Omnet
Each host in Omnet (i.e. its TCP instance) serves
as SuOC according to the ONC architecture. Upon
each of these SuOCs, ONC is set up according to
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
126
the modified architecture (see Section 3.1). We used
the Omnet++ network simulator (Varga, 2001) as ba-
sis for the development and evaluation. Omnet++ is
a standard tool in network protocol simulation and
has been widely used in academia and industry. We
implemented the SuOC as instance of the Standard-
Host module in the INET-Framework (INET Project,
2014) of Omnet++. This module realises the TCP/IP
protocol stack and can easily be connected to a net-
work within the simulator. The sub-modules con-
taining the particular functionality of the TCP and
IP layers are configured at simulation start-up using
NED-parameters (i.e. special variables belonging to
one module; NED is Omnet’s control language). Ini-
tially, these parameters are set using standard config-
urations, but they can be altered individually – which
is important to simulate the desired behaviour.
Table 1: TCP parameters, standard configuration (INET),
and number of bits for encoding in the optimisation process.
Parameter Value Bits
mss 536 10bits
advertisedWindow 14 ×mss 5bit
tcpAlgorithmClass TCPReno 2bit
delayedAcksEnabled false 1bit
nagleEnabled true 1bit
limitedTransmitEnabled false 1bit
increasedIW Enabled false 1bit
sackSupport false 1bit
windowScalingSupport false 1bit
timestampSupport false 1bit
Table 1 lists the available TCP parameters of
the StandardHost module. Thereby, mss refers
to the maximum segment size (see RFC 793),
advertisedWindow refers to the maximum size of the
buffer for incoming messages, tcpAlgorithmClass
is used to select the desired TCP variant (TCPReno,
TCPNewReno, TCPTahoe, TCPNoCongestionCon-
trol, or DumpTCP), delayedAcksEnabled enables
or disables the delayed ACK-algorithm (see RFC
1122), nagleEnabled chooses to use the Nagle-
algorithm (see RFC 896), limitedTransmitEnabled
activates the Limited-Transmit-algorithm (avail-
able for TCPReno, TCPTahoe, TCPNewReno,
and TCPNoCongestionControl, see RFC 3042),
increasedIW Enabled controls the Increased Initial
Window (see RFC 3390), sackSupport activates
the support for selective acknowledgments (is
automatically used if both endpoints support
this option, see RFCs 2018, 2883, and 3517),
windowScalingSupport activates the support for
window scaling (is automatically used if both end-
points support this option, see RFC 1323), and finally
timestampSupport activates the support for times-
tamps (see RFC 1323). We decided to use all of these
parameters and not just the set of most promising
ones, since we wanted the system to automatically
figure out the impact of each particular parameter.
4 EVALUATION
This section evaluates the potential benefit of the pre-
viously explained approach. Therefore, simulations
within the network simulator Omnet++ (Varga, 2001)
have been performed.
4.1 Experimental Setup
In order to simulate the cooperative parameter optimi-
sation mechanism, we implemented the approach as
described in Section 3.3 directly in Omnet by defining
new modules. Afterwards, we set up a test network
that consists of two hosts (cli0 and cli1) running the
ONC approach and communicating with each other.
A third component (srv) provides content and does
not understand the ONC messages. We also tested
the approach in simulations of larger networks (i.e. 5,
10, and 20 hosts). Since the results are comparable to
those of this simple setting, we neglect this informa-
tion in the context of this paper.
4.2 Experimental Results
We start the evaluation with an investigation of the
underlying fitness landscape for the parameter space.
Afterwards, the learning behaviour at runtime of the
developed solution is analysed. This is done in com-
parison to the usage of standard TCP parameters
available in Omnet++ (which are already a near-to-
optimal configuration, see fitness landscape). Finally,
the individual results for exemplary simulation runs
are generalised by deriving averaged values over dif-
ferent scenarios with varying conditions.
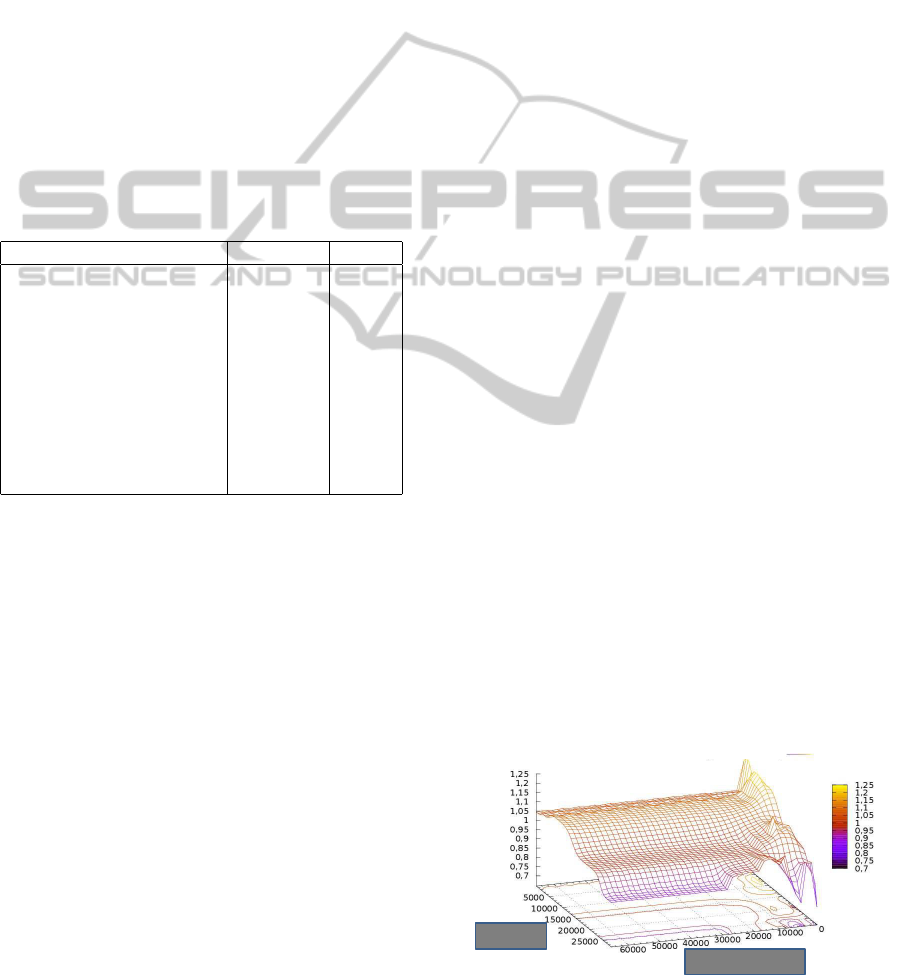
Buffer Size
Max. Segment Size
Fitness (higher values are better)
Figure 2: Fitness Landscape.
CooperativeSelf-optimisationofNetworkProtocolParametersatRuntime
127

4.2.1 Fitness Landscape
Initially, we analysed the underlying fitness landscape
for the optimisation problem. For better illustration,
the following section focuses on the two most im-
portant parameters: (a) maximum segment size and
(b) buffer size). We set up a simulation in Omnet++
without ONC module – it contains just the simulated
client and server components. The simulation covers
one complete day (i.e. 24 hours). As a result, Fig-
ure 2 visualises the relation between the two param-
eters: smaller values for the maximum segment size
and higher ones for the buffer size are better. In gen-
eral, the fitness landscape describes an almost flat and
smooth surface – meaning that the optimisation is a
minor complex problem. Taking further parameters
into account makes the optimisation problem more
complex. Especially the true/false decisions for en-
abling or disabling certain functionalities results in
hard breaks in the landscape (difficult to optimise).
4.2.2 Online Learning Behaviour
In order to simulate the online learning behaviour and
the success over time, we simulated five consecutive
days in Omnet. Both clients randomly access web-
sites at the server component. One of the clients (we
refer to this as “passive” – i.e. cli1) keeps its standard
TCP configuration during operation – this means that
it does not activate its ONC-based parameter adapta-
tion mechanism during normal operation. This is only
done in case of incoming requests for cooperative op-
timisation by the other client.
Layer 2
Layer 1
Simulated time
Fitness of the active rule
Figure 3: Change of the fitness of the active rule over time;
starting with a bad parameter setting.
The active client (i.e. cli0) simultaneously ex-
ecutes the ONC component – it evaluates its be-
haviour and adapts the parameter settings using ONC.
Thereby, it starts the cooperative optimisation in case
of missing knowledge or unsatisfying performance.
Initially, the active client starts with an empty rule
base – meaning there is no prior knowledge or any
information about the desired parameter settings.
The goal for the active client is to find well-
performing parameter settings – without any initial
information. As starting configuration we chose bad
settings according to the fitness landscape character-
isation depicted in Figure 2 – in particular, we iden-
tified one of the “deepest” valley (i.e. mss = 40,000
and bu f f er = 20, 000).
Figure 3 illustrates the achieved results for the ac-
tive client. Thereby, the figure distinguishes between
Layer 1 (blue line) and Layer 2 (red line). The values
have been accessed at the begin of each new parame-
ter set being active and at the end. From this figure it
is visible that the start parameter configuration is far
from being optimal, values for the fitness between 0.9
and 1.0 can be observed. The theoretic optimum in
this scenario (which depends e.g. on the channel char-
acteristics) is
√
2, meaning about 1.414. The perfor-
mance of Layer 2 quickly approaches values between
1.0 and 1.2 that further improve to values between 1.2
and 1.3 during the simulation.
The randomised traffic generation pattern resulted
in the highest load within the first 12 hours of the first
day. Afterwards, the ONC component of the active
client recognises that no traffic is observed (i.e. there
is the possibility to find new parameter settings) and
the current setting seems to be non-optimal (i.e. far
from the theoretic optimum). In the course of the sim-
ulation, eventually new traffic comes in and the ONC
system proceeds in adapting the parameter sets. This
results in a continuously increasing performance of
Layer 1. At the end of the simulation (i.e. at the end
of day 5), the performance is constantly near to 1.3
(this is about 92% of the optimum).
For comparison reasons, we performed the same
simulation without the ONC component. This means
that each participant performs the standard TCP pa-
rameter set as listed in Table 1. This standard param-
eter set represents the hand-optimised solution avail-
able in the simulator – in general, this should be the
setting that works best on average in each possible sit-
uation. The results are illustrated by Figure 4. Com-
paring both figures, it can be observed that the ONC
approach finds similar parameter settings as the stan-
dard parameter set (i.e. the last parameter sets are:
mss = 586 and bu f f er = 7,504) – but without the
need of prior knowledge, without manual optimisa-
tion, and with the potential benefit to adapt auto-
matically to changing conditions and different phys-
ical connections. This is exactly what we wanted to
achieve with the developed concept.
Another observation that can be made in this
single-run scenario is that the performance is chang-
ing - it is not just a continuous improvement. In con-
trast, periods of decreasing performance can be ob-
served. This is due to the learning mechanism that
follows a roulette-wheel approach considering the fit-
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
128
ness of the available rules. Please note that the results
shown in the figures reflect just one simulation run
and have not been averaged over several runs. This
is due to demonstrating the specific behaviour – the
effects of individual rule adaptations are not visible in
aggregated figures based on several runs. Averaged
values are considered in the following part.
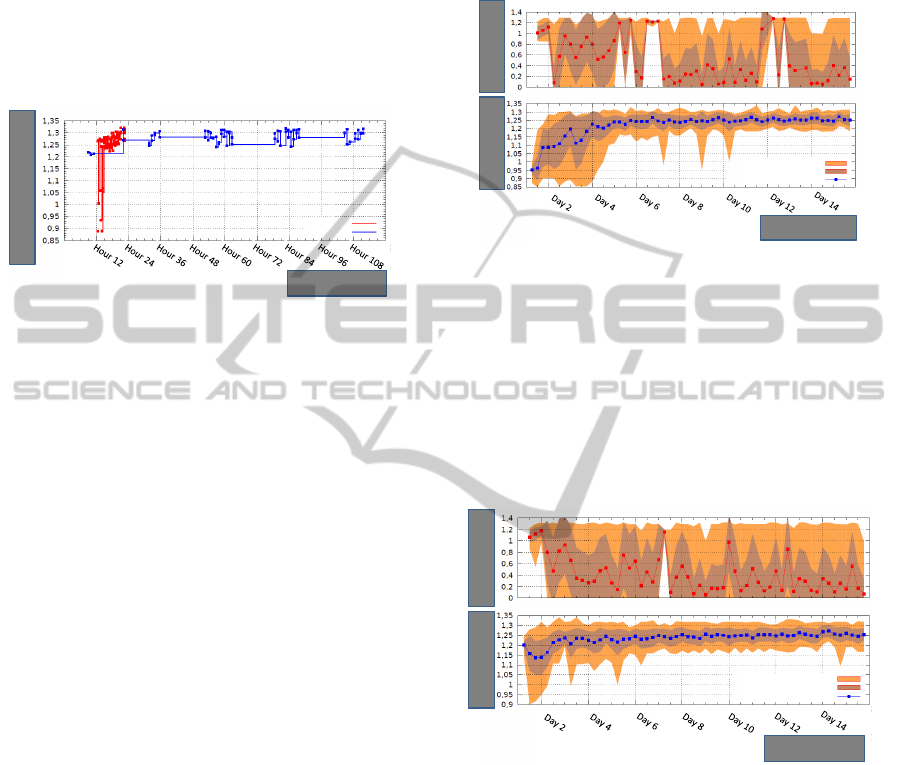
4.2.3 Evaluation of Multiple Scenarios
Layer 2
Layer 1
Simulated time
Fitness of the active rule
Figure 4: Change of the fitness when performing the stan-
dard parameter sets.
The third part of the evaluation considers the
performance of ONC in a more generalised way.
Thereby, we take 27 runs of the simulation with vary-
ing seeds into account and derive the statistical re-
sults. The considered simulation period has been in-
creased to 15 days to get an impression about the
long-term behaviour of the system. In order to be able
to compare the results of all runs, we deactivated the
dynamic adaptation of the RTT estimation. This is
done by defining static RT T
min
(here: 0, 013 ms) and
RT T
max
(here: 4, 3 ms) values (cf. Equation 1). Fig-
ure 5 illustrates the results for the ONC solution. In
comparison, Figure 6 illustrates the behaviour in case
of using just the standard parameter settings (i.e. de-
activated rule-adaptation for all hosts). The figures
display the average during the simulation time (blue
line), the corridor within that values are measured (i.e.
minimum and maximum values over time), and the
standard deviation.
Similar to the previous experiments, ONC (i.e.
client0) starts with a bad parameter setting (i.e. again:
mss = 40, 000 and bu f f er = 20, 000). The figure
shows that the effect observed for the single run can
be generalised for several runs. Thereby, we depict
the corridor of the observed behaviour using the mini-
mum and maximum values at the certain point in time
for the system performance. The most obvious insight
by considering this corridor is that its size decreases
over time for Layer 1; in contrast, the behaviour does
not change significantly for Layer 2. This is exactly
what the learning approach is assumed to achieve:
With increasing number of classifiers and growing ex-
perience with these, the system gets aware of the par-
ticular impact (i.e. it actually learns the desired be-
haviour). Layer 2 tries to find novel behaviour for
previously untested situations – therefore, no recog-
nition of patterns is possible (i.e. it has to discover the
fitness landscape again for each new task).
Fitness Layer 2Fitness Layer 1
Simulated time
Minimum/Maximum
Standard deviation
Arithmetic mean
Figure 5: Performance of Layer 1 and Layer 2 for 15 simu-
lated days (start = bad parameter settings).
A second major observation can be made when
comparing Figure 5 and Figure 6. For the ONC-based
variant, the learning behaviour is visible (decreasing
corridor size) – while it stays static for the non-ONC
version. This reflects the expected behaviour, since
the non-ONC version performs the standard parame-
ter sets without modifications and hence results in a
statistically static behaviour by design.
Fitness Layer 2Fitness Layer 1
Simulated time
Minimum/Maximum
Standard deviation
Arithmetic mean
Figure 6: Performance of Layer 1 and Layer 2 for 15 simu-
lated days (standard parameter settings).
4.3 Discussion of the Achieved Results
The simulation results demonstrate the potential
benefit of utilising the proposed cooperative self-
optimisation to find the best possible parameter set-
tings in connection-oriented network protocols. The
scenario is a perfect example to demonstrate OC’s vi-
sion of moving design-time decisions to runtime and
into the responsibility of the system. Instead of spend-
ing resource- and time-consuming optimisation ef-
forts at design-time to find the best possible parameter
settings – mostly those configurations are requested
that work best on average for all foreseen situations
CooperativeSelf-optimisationofNetworkProtocolParametersatRuntime
129

– the system itself finds the best parameter settings in
each situation. This results in a highly self-adaptive
and robust behaving system which can also adapt to
unforeseen situations.
Since a local perspective is not enough for
connection-oriented protocols to either set consistent
parameters or to measure the success, cooperative so-
lutions are needed. This matches again perfectly with
OC’s research agenda. In this paper, we developed a
self-organised solution which cooperatively finds the
best strategies at runtime. The effect of testing and
changing parameters always appears for two partners
– thereby, we created a self-organised way of chang-
ing the structure of the system (i.e. which entity is
cooperating with which other entity). From a perfor-
mance perspective, the developed solution is able to
find parameters that show the same performance as
the optimised standard parameters in undisturbed sit-
uations. However, the system is expected to find su-
perior parameter settings in disturbed situations (i.e.
very high latency or very high packet loss).
5 CONCLUSIONS
This paper presented a novel distributed approach for
self-optimisation of data communication protocol pa-
rameters. Based on previous work in the context of
the Organic Network Control system (ONC), we ex-
plained a cooperative approach to find and test param-
eter settings for TCP. The approach has been eval-
uated in a Omnet++-based simulation and demon-
strated the potential benefit. In contrast to other solu-
tions from the state of the art, our method works with-
out prior knowledge, considers safety-boundaries,
and self-improves its behaviour over time.
Current and future work focus on further improv-
ing the mechanism and applying it to continuously
changing conditions. In the scenarios considered in
this paper, we demonstrated that the solution is able
to find similar parameter settings as those initially
available in the TCP implementation – but without
any prior knowledge and without the need of time-
consuming optimisation processes at design-time. We
only simulated slightly changing conditions that do
not affect the physical medium (i.e. we only work on
Ethernet connections). Currently, we analyse how the
behaviour changes in case of replacing the physical
medium (e.g. Ethernet vs. WiFi) during operation.
REFERENCES
Dukkipati, N. et al. (2010). An Argument for Increasing
TCP’s Initial Congestion Window. ACM SIGCOMM
Computer Communications Review, 40:27–33.
Georganopoulos, N. and Lewis, T. (2007). A Framework
for Dynamic Link and Network Layer Protocol Opti-
misation. Proc. of Mobile and Wireless Communica-
tions Summit, pages 1–5.
INET Project (2014). The INET Framework.
http://inet.omnetpp.org/.
Kleinrock, L. and A.Tobagi, F. (1975). Packet Switch-
ing in Radio Channels: CSMA Modes and Their
Throughput-Delay Characteristics. IEEE Trans. on
Com., 23(12):1400–1416.
Martin, J., Nilsson, A., and Rhee, I. (2003). Delay-based
congestion avoidance for TCP. IEEE/ACM Transac-
tions on Networking, 11(3):356 – 369.
Miranda, H., Pinto, A., and Rodrigues, L. (2001). Appia: A
Flexible Protocol Kernel Supporting Multiple Coordi-
nated Channels. In Proc. of ICDCS ’01, pages 707 –
710. IEEE.
M
¨
uller-Schloer, C. (2004). Organic Computing: On the
Feasibility of Controlled Emergence. In Proc. of
CODES and ISSS’04, pages 2–5.
Nichols, K. and Jacobson, V. (2014). Controlled Delay Ac-
tive Queue Management draft-nichols-tsvwg-codel-
02. Technical report, Pollere Inc. and Google.
Prothmann, H., Rochner, F., Tomforde, S., Branke, J.,
M
¨
uller-Schloer, C., and Schmeck, H. (2008). Organic
Control of Traffic Lights. In Proc. of ATC-08, volume
5060 of LNCS, pages 219–233. Springer Verlag.
Rosa, L., Lopes, A., and Rodrigues, L. (1997). Appia to R-
Appia: Refactoring a Protocol Composition Frame-
work for Dynamic Reconfiguration. Technical Re-
port 1, Univ. of Lisbon, Dep. of Informatics.
Tomforde, S. and H
¨
ahner, J. (2011). Biologically Inspired
Networking and Sensing: Algorithms and Architec-
tures, chapter Organic Network Control, pages 11–35.
Tomforde, S., Hurling, B., and H
¨
ahner, J. (2011a). Dis-
tributed Network Protocol Parameter Adaptation in
Mobile Ad-Hoc Networks. In Informatics in Control,
Automation and Robotics, pages 91 – 104. Springer.
Tomforde, S., Prothmann, H., Branke, J., H
¨
ahner, J., Mnif,
M., M
¨
uller-Schloer, C., Richter, U., and Schmeck, H.
(2011b). Observation and Control of Organic Sys-
tems. In Organic Computing - A Paradigm Shift for
Complex Systems, pages 325 – 338. Birkh
¨
auser.
Tomforde, S., Zgeras, I., H
¨
ahner, J., and M
¨
uller-Schloer,
C. (2010). Adaptive Control of Wireless Sensor Net-
works. In Proc. of ATC’10, pages 77 – 91.
van Renesse, R., Birman, K. P., and Maffeis, S. (1996). Ho-
rus: a flexible group communication system. Commu-
nications of the ACM, 39(4):76 – 83.
Varga, A. (2001). The OMNET++ discrete event simulation
system. In Proc. of European Simulation Multiconfer-
ence, pages 319–324.
Wilson, S. W. (1995). Classifier Fitness Based on Accuracy.
Evolutionary Computation, 3(2):149–175.
Ye, T. and Kalyanaraman, S. (2004). A recursive random
search algorithm for network parameter optimization.
SIGMETRICS Perform. Eval. Rev., 32(3):44–53.
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
130
