
Mobile Sensor Path Planning for Iceberg Monitoring
using a MILP Framework
Anders Albert and Lars Imsland
Department of Engineering Cybernetics, Norwegian University of Science and Technology, Trondheim, Norway
Keywords:
Optimization, Path Planning, UAV, UAS.
Abstract:
We look at the task of iceberg monitoring using a single mobile sensor, and we suggest a modular framework
for this. The focus is on path planning for which we come up with a novel strategy, which includes solving
a static optimization problem often to account for changes. We formulate the optimization problem in a
MILP framework, and we illustrate how this yields acceptable computational time for problem size of about
15 icebergs. We also suggest a tuning rule for weighting between different objectives in the optimization
formulation, which we demonstrate in simulations. Initializing the optimization with the previous solution
can improve computational time dramatically. Finally, we discuss how we easily can add extra features to our
framework.
1 INTRODUCTION
Unmanned Aerial Vehicles (UAVs), or more general
Unmannd Aerial Systems (UAS), have been studied
for a long time. The military has recognized the util-
ity of UAVs as early as WWI. During the Cold War
the efforts of developing UAVs for surveillance and
reconnaissance missions increased dramatically, and
the Vietnam War was the first war where UAVs got put
into substantial use (Cook, 2007).
In modern times, UAVs performing surveillance and
reconnaissance missions see applications in civilian
life as well as the military. Examples of applications
are environmental monitoring - which include weather,
wildfire and polar monitoring (Chmaj and Selvaraj,
2015), traffic surveillance (Peng et al., 2012), agricul-
ture (Watts et al., 2012) and much more.
In this paper we will study tracking of icebergs.
Radar, satellite imagery, shipboard sensors, drift buoys
and visual observation have traditionally been used for
the tracking and forecasting of icebergs (Timco et al.,
2005). However, we envision UAVs to be important in
the future of tracking icebergs (Eik, 2008). UAVs has
the advantage over satellites when comparing price
and maneuverability, in addition to spatial and tempo-
ral resolution. Satellites can only follow predefined
trajectories. In the Northern hemisphere the satellite
coverage is pore, and you can expect only coverage
Research partly funded by Research Council of Norway,
RCN project no. 223254: CoE AMOS.
within hours interval. This calls for a real-time solu-
tion for monitoring icebergs, where we propose UAVs
as mobile sensors to be a cost-effective solution.
1.1 Contribution
Our contribution in this paper is a framework for mon-
itoring of moving targets with a single UAV. We in-
troduce a novel strategy for doing path planning. The
assumptions we make in Section 3 enable us to reduce
the path planning problem to the targets visitation prob-
lem (TVP) (Grundel and Jeffcoat, 2004). Furthermore,
we propose a formulation for this problem using Mixed
Integer Linear Programming in Section 3.1.
1.2 Previous Work
Path planning for UAVs is currently a popular research
topic, and it has been for the last 10 years. There are
many different approaches to path planning for UAVs
visiting different objects or targets. The most basic
approach to this problem is the Traveling Salesman
Problem (TSP). TSP is one of the most studied compu-
tational problems in the last 60 years(Applegate et al.,
2011) The TSP formulation for this problem is simply
to find the shortest path that contains all targets. Refer-
ence (Applegate et al., 2011) may serve as a starting
point for TSP.
An extension of the TSP problem is to add profits
to each target. TSP with profits adds the objective of
collecting maximum of profits without exceeding a
131
Albert A. and Imsland L..
Mobile Sensor Path Planning for Iceberg Monitoring using a MILP Framework.
DOI: 10.5220/0005521801310138
In Proceedings of the 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2015), pages 131-138
ISBN: 978-989-758-122-9
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

travel cost. A starting point for this research may be
(Feillet et al., 2005).
In this paper we use another approach with basis
in TSP, the targets visitation problem (TVP) (Grundel
and Jeffcoat, 2004). The difference between TVP and
TSP is that TVP also prioritize targets of high value
early in the visitation sequence. We will come back
to how we assign different values to the targets in our
case.
Besides formulations that take basis in TSP there
are multiple different approaches for a framework for
continuous trajectory planning. In (Haugen and Ims-
land, 2013), the path planning for mobile sensors is
formulated as a dynamic optimization problem. This
problem is discretized into a large-scale nonlinear pro-
gramming problem and solved. In another approach,
(Walton et al., 2014) formulate more complex dynam-
ics both for the mobile sensors and the targets. Then,
they present different complex problem formulations
and solve the optimization numerically.
In this paper we divide the path planning into dif-
ferent modules. In (Skoglar et al., 2012), they use a
similar approach and divide the sensor management
into different subtask. Then, they solve the path plan-
ning by using Bayesian estimation and search methods.
Another approach is to include all objectives into a sin-
gle objective function like (Pitre et al., 2009).
In (Alidaee et al., 2009), the authors formulate a
target search for
m
UAVs in a Mixed Integer Linear
Programming. This is similar to the formulation in
this paper.
This paper is organized as follows. We present the
problem formulation in Section 2. In Section 3, we
get into the task of path planning. First, we present the
strategy we apply to the path planning in this paper
with the appurtenant assumptions. Then, in Section 3.1
we formulate the optimization formulation and the con-
straints for the path planning. In Section 3.2 we come
up with a rule to assist tuning between the objectives
presented in Section 3.1. We handle the implementa-
tion and complexity of the path planning problem in
Section 4. We study a single case of monitoring 12
icebergs and show how weighting between the objec-
tives influences the solution in Section 5. Finally, we
discuss the result, conclude and discuss future work in
Section 6 and 7.
2 PROBLEM FORMULATION
In our case, icebergs are the desired target for moni-
toring and we use an UAV as the mobile sensor. Addi-
tionally, we have some a priori estimate of the location
of the icebergs to which we assign some uncertainty.
Ultimately, we desire an actuator input for the UAV,
which exploits our a priori information, iceberg and
UAV models, sensors, and possibly other information,
to keep track of the icebergs.
We choose to approach this problem in a modular
fashion. An advantage of dividing the problem into
different subtasks, is that it gets easier and safer to im-
plement. Two subtasks are, for example, path planning
and autopilot. If the path planning fails, the autopilot
will still keep the UAV in the air. The different tasks
can have different sampling time. While the UAV
will need to change its actuator input multiple times a
second, the path planning might not be necessary to
execute more than every other minute or even rarer.
Figure 1 illustrates the division and the dependen-
cies between the different subtasks. A more detailed
description of each task follows:
•
UAV: We view the UAV as a unit consisting of
both the physical structure of the airplane together
with an autopilot and measurement instruments.
We assume that the autopilot is able to set actuator
inputs for the plane based on waypoints. The UAV
must also have a sensors for discovering icebergs,
for instance thermal or optical cameras, and/or
radars.
•
Observer/Measurement Processor. The measure-
ments from the sensors must be processed. Fur-
thermore, a path planner will need a continuous
position estimate of all the icebergs.
•
Path Planner. A path planner will use the estimated
positions of icebergs to come up with a set of way-
points for the UAV that will minimize the position
uncertainty the icebergs. In addition, a path plan-
ner must manage the set of icebergs of interest. If
a new icebergs appear or icebergs leave the area
of interest, the path planner must update the set
of icebergs. Another task for the path planner is
to plan a path for searching for an icebergs not
located at the estimated position.
In this paper, we will not focus on using image pro-
cessing to obtain position and velocity measurements
of objects in water from a camera. An excellent refer-
ence for doing this is (Leira et al., 2015). The focus in
the paper will be the task of the path planning. We will
not go into the task of adding and removing icebergs
from the set of icebergs under observation, as this is
simple. Searching for icebergs that are not at their
estimated position might not be trivial, but it differs
from the path planning part and for that reason it will
not be considered here.
3 PATH PLANNING
The main task for the path planner in our framework
will be to take a set of iceberg position points and that
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
132
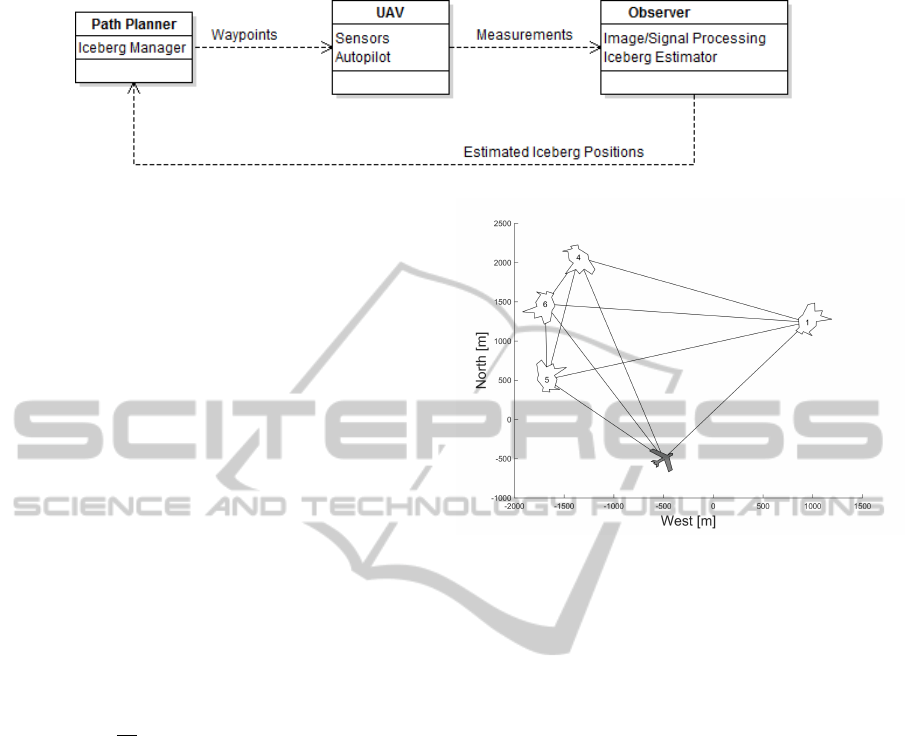
Figure 1: Framework for iceberg monitoring.
of the UAV and decide on a sequence for the UAV to
visit the icebergs.
Strategy
: We plan to solve the path planning prob-
lem often. Then, we apply only the first iceberg of the
sequence to the UAV. When the UAV reach the iceberg,
we solve the path planning problem again and apply
the first iceberg of the new sequence to the UAV, and
so on.
This strategy is inspired by model predictive con-
troll (MPC). MPC exploits knowledge of a process
model and constraints, and minimize some optimiza-
tion criteria to calculate a sequence of actuator inputs
over a control horizon. Then, MPC applies only the
first actuator input of the sequence before repeating
the calculations using updated information about the
process. The controller continues to only apply the
first actuator input of each solution sequence before
redoing the calculations.
To be able to apply this strategy, we need a fast and
efficient path planning algorithm. The strategy also
enables us to make some assumptions and simplifica-
tions:
•
We assume
no
UAV dynamics in the path plan-
ning, and merely decides the order of which the
UAV should visit the icebergs. This enables us
to simplify the formulation for the path planning
problem. This is a natural assumption if the field
of view (FOV) of the UAV is larger than its turning
radius. If two or more icebergs are close, we can
consider them one point if the FOV will be able to
cover them both.
•
We assume that we have an initial estimate of the
position of the set of icebergs, for example from
satellite imagery. In addition, we assume that we
have an initial value for the position uncertainty of
each iceberg. We can calculate an uncertainty of
the position estimate based on the time since the
observation.
•
The icebergs move much slower than the UAV.
This enables us to consider the iceberg stationary
when formulating the path planning problem. A
typical iceberg velocity is of order 0.1 m/s (Eik,
2009), while we expect an UAV to move 22-25 m/s
(UAV Factory, 2012).
Figure 2 illustrates the problem. In the figure we
Figure 2: Path Planning Problem with UAV and 4 icebergs.
The numbers inside the icebergs are the position uncertainty
value for each iceberg.
have drawn the problem as a graph to make the simi-
larities to the traveling salesman problem (TSP) clear.
The UAV and each iceberg is a node in the graph. If
we do not consider the uncertainty of each iceberg and
with the stated assumptions we want a shortest path
that starts from the UAV and connects all the icebergs.
This is the traveling salesman problem.
The traveling salesman problem is a specific prob-
lem of the general class Mixed Integer Linear Pro-
gramming (MILP) (Bektas, 2006). MILP problems
are optimization problems containing integer variables
either in the objective function, in the constraints or in
both.
This motivates us to solve the path planning prob-
lem with an optimization approach. The first objective
of the optimization approach will be, as with a TSP
problem, to find the shortest distance between each
node in the graph. Second, we desire to reduce the
position uncertainty of each iceberg. We expect the
position uncertainty of each iceberg to vary with the
time since the UAV observed it. This objective reduces
to sort the iceberg according to their position uncer-
tainty. The optimization must weigh between these
two objectives.
An advantage with the strategy we choose is that
we do not need an accurate model of the icebergs.
Modeling icebergs is difficult, especially since getting
other measurements than position and velocity from
MobileSensorPathPlanningforIcebergMonitoringusingaMILPFramework
133

the air is hard. By having a problem that we solve
often we can take new measurements into account
and thus compensate for model inaccuracies that will
accumulate over time.
3.1 Optimization Formulation for Path
Planner
We use a similar approach as (Bektas, 2006) to formu-
late the optimization problem in a MILP framework.
We consider
N
nodes in the optimization problem,
which is the number of icebergs in addition to the UAV.
Furthermore, we have two sets of optimization vari-
ables. The first is a binary matrix,
y
path
, of dimension
N × N
. Each element,
y
path
(i, j)
, represent the path
from node
i
to
j
. The element is
1
if the path included
and
0
if not. The second optimization variable is an in-
teger vector,
t
, of length
N
. This contains the sequence
of each node in the visiting order.
We can now formulate the optimization problem as
min F(y
path
,t(i)) = −
N
∑
i=1
σ
nodes
(i)(N −t(i))+ µD
(1)
The position uncertainty of each iceberg is represented
by a number in the vector
σ
nodes
, where the first ele-
ment is the position uncertainty of the UAV, which is 0.
A higher number represent a higher uncertainty, and
thus an increased desire to visit the iceberg.
D
is the
total distance traveled by the UAV and
µ
is a tuning
variable we use to weight between the two objectives.
The total distance of the traveled path is
D =
N
∑
j
N
∑
i
y
path
(i, j)d(i, j). (2)
The matrix
d
contains the distances from node
i
to
j
in element
d(i, j)
. Notice that this enables us to
include weather effects like wind by having a longer
distance to a point than from depending on flying with
or against the wind.
Second, we must make sure that each node is not
visited and left more than once
N
∑
i
y
path
(i, j) ≤ 1 ∀ j and (3)
N
∑
j
y
path
(i, j) ≤ 1 ∀i. (4)
If we desire a circular path, these constraints should be
equality constraints. A linear path containing
N
nodes
needs N − 1 paths
N − 1 =
N
∑
i=1
N
∑
j=1
y
path
(i, j). (5)
The UAV must be the first point in the path. To ensure
this we must set the first element of the
t
vector equal
to 1:
t(1) = 1. (6)
We do not allow the UAV to visit an iceberg more
than once. To ensure this each element of the t vector
must be unique:
t
i
6= t
j
∀i 6= j. (7)
The values of
t
must be be within the number of
nodes in the problem:
1 ≤ t ≤ N. (8)
Finally, it is important that the optimal path is con-
nected. If we demand that each consecutive node that
are connected through a path is later in the visiting
sequence we avoid subcycles. The visiting sequence
is controlled by the t vector, making the constraint:
t
j
−t
i+1
≥ −N(1 − y
path
(i, j)) ∀i 6= j. (9)
3.2 Tuning
In the optimization formulation
µ
weights between the
shortest distance and reducing the position uncertainty.
If the constant is set too high, the solution will be equal
to the TSP solution. Opposite, if the constant is set
too low the solution will be equal to a sorting of the
icebergs with the highest uncertainty first. It is difficult
to avoid having to tune this trade-off. However, it is
possible to deduce a tuning rule to help select the value
of the tuning constant.
The traveling distance for the UAV and the uncer-
tainty value are of different magnitude. To compare
them we need to scale them accordingly. First, we
suggest to calculate the maximum obtainable uncer-
tainty value. We can calculate this value by sorting the
uncertainty values of the iceberg in ascending order,
multiply element wise with a vector from 0 to
N − 1
,
and sum the vector:
F
1,max
=
N−1
∑
i=0
σ
nodes,sorted
(i) · i (10)
Second, the matrix,
d(i, j)
, contains all the distances
from node
i
to
j
. We can calculate the average distance
for the entries in this matrix through the following
equation:
d
avg
=
∑
N
i=1
∑
N
j=1
d(i, j)
N(N − 1)
(11)
Finally, we calculate a rough estimate of the distance
traveled by multiply the average distance in the dis-
tance matrix by the number of paths we need in our
optimization problem:
D
est
= d
avg
(N − 1) (12)
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
134
Now, the objective function, equation
(1)
, using these
calculated constants is
F = −F
1,max
+ µD
est
(13)
We want to have the two terms in the objective to be
of comparable size, and a natural choice for
µ
will
therefore be
µ =
F
1,max
D
est
. At this point we introduce an
additional tuning constant τ making the choice for µ:
µ = τ
F
1,max
D
est
(14)
This new tuning constant will be more intuitive to set.
A value of zero for
τ
puts all the weight on minimizing
the position uncertainty of the iceberg, while a value
of one gives approximately equal weight to the two
objectives. However, as
τ
is set to a large value (higher
than one), the weight is put on minimizing the traveling
distance of the UAV. In the simulations in Section 5
we will compare using different values for τ.
4 IMPLEMENTATION AND
COMPLEXITY OF PATH
PLANNING
MILP is in general an NP-complete problem with com-
puting time growing exponentially with problem size
(Mahajan and Ralphs, 2010). Therefore, since our
problem is a MILP problem, we will get an exponen-
tial growth in computational time with problem size.
However, with a modern computer and state-of-the-art
solver we will have an acceptable solution time for a
problem size of sufficiently small size.
To demonstrate the solution time of our problem
we solve the target visitation problem from equation
(1)
with an increasing problem size. To implement
the optimization formulation, we used the YALMIP
language developed by (Lofberg, 2004). To solve the
problem we use the solver CPLEX from IBM (IBM,
2011).
To setup up the target visitation problem we chose
to randomly set positions of the icebergs within a given
area. In addition, we randomly assign position uncer-
tainty values between 1 and 10 for each iceberg. Table
1 contains the parameters for setting up the problem.
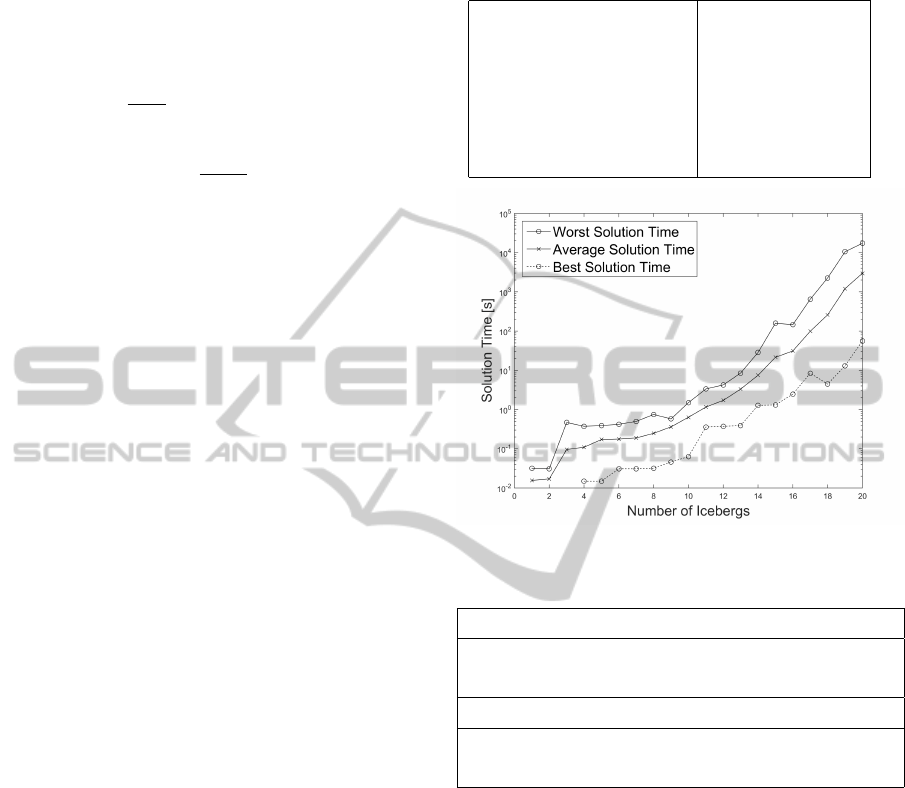
Figure 3 illustrate the worst case, average and best
solution time in seconds in a logarithmic plot. The
graph clearly illustrates the exponential rise in solution
time with the number of icebergs to track. However, if
the number of icebergs is kept at about 15 icebergs the
solution time is about 1-2 minutes. Table 2 lists some
of the solutions time in seconds.
There are two advantages with the strategy we have
chosen in regard to computational time. First, after
Table 1: Setup Parameters for each Problem of Different
Size.
Iceberg Area [5000m × 5000m]
Iceberg Uncertainty [1..10]
UAV position (-500m,-500m)
UAV Uncertainty 0
Number of Optimizations 50
τ 0.5
Figure 3: Computational time for different problem size.
Table 2: Average and Worst Case Computational Time.
Icebergs 2 6 10
Avg. sol. time [s] 0.02 0.18 0.64
Worst case sol. time [s] 0.03 0.42 1.50
Icebergs 12 16 20
Avg. sol. time [s] 1.71 31.20 2969.69
Worst case sol. time [s] 4.24 145.16 17269.17
solving the optimization problem one time we can use
the first solution to initialize the next problem and so
on like an MPC. This is called a warm start can greatly
reduce the computational time. Second, if the solver
is not able to obtain a solution within a given time, the
UAV can use the next point in the previous solution
as the next waypoint. For these reasons the algorithm
can in practice handle up to 20 icebergs.
5 SIMULATION
In this section, we simulate iceberg monitoring with
12 icebergs and a single UAV. To demonstrate the path
planning algorithm from Section 3.1 with different
choices for τ from Section 3.2.
Before we go into the simulation results we present
MobileSensorPathPlanningforIcebergMonitoringusingaMILPFramework
135
the model we use for the UAV, the icebergs and the
position uncertainty of the icebergs.
5.1 Iceberg and UAV Models
For the UAV we use a Dubins Vehicle (Dubins, 1957)
as model
˙x
˙
ψ
=
U cos(ψ)
U sin(ψ)
u
, (15)
here
x
is the position,
U
is the velocity,
ψ
is the head-
ing of the vehicle and
u
is the actuator of the UAV.
In addition, the actuator input must be within certain
limits
u ∈ [u
min
,u
max
]. (16)
The UAV needs an autopilot to steer it from waypoint
to waypoint. We use the line of sight (LOS) algorithm
for the UAV autopilot described in section 10.3 of
(Fossen, 2011). In addition, we added integral action
in the controller with anti-windup from (Caharija et al.,
2012).
We model the iceberg as moving point with a known
velocity and velocity uncertainty
˙
ξ
i
= v
i
+ w
i
(t), (17)
here
ξ
i
is the position,
v
i
is the known velocity and
w
i
(t) ∼ (0,Q
i
)
is the uncertainty in the velocity, which
have Gaussian distribution with a mean of zero and
variance of
Q
i
. The dimension of
v
i
,
ξ
i
and
w
i
(t)
is
R
2
.
The subscript
i
highlights that all of these values are
different for each iceberg. This renders the estimate
model for each iceberg to be
˙
ˆ
ξ
i
= v
i
, (18)
where
ˆ
ξ
i
is the estimated position of the iceberg.
We need to model the position uncertainty of each
iceberg. First, we consider the error in position esti-
mate defined as
˜
ξ
i
= ξ
i
−
ˆ
ξ
i
. We can then calculate:
˙
˜
ξ
i
= w
i
(t) (19)
A reasonable assumption is that the variance in both
direction in the plane will be equal for an iceberg. This
means we can set
Q
i
= q
i
I
2×2
. If we then define the
uncertainty,
σ
i
, as the covariance of the estimation
error,
σ
i
= E[
˜
ξ (t)
˜
ξ
T
(t)] (20)
and follow the calculations from section 8.1.1. in (Dan,
2006) we get:
σ
i
= q
i
t (21)
When the icebergs comes within the FOV of the UAV
we set the uncertainty to zero. Combining this with
derivative of equation (21) we get:
˙
σ
i
= q ξ
i
/∈ FOV (22)
σ
i
= 0 ξ
i
∈ FOV. (23)
5.2 Simulation Results
We ran simulations with 12 icebergs and a single UAV
to do the monitoring. The UAV and the iceberg were
spread out over an area of about
[5000m × 4000m]
.
The parameters we used in the simulation are in table
3. Notice that the same value for variance were used
for all iceberg. In addition, we used the same values
for
w
i
(t)
in all simulations. This is done to be able to
compare the effect of only changing the value for
τ
through the simulations. All simulation run for a time
span of T = 1000 seconds.
Table 3: Simulation Parameters.
UAV Icebergs
x
0
= [−500, 500]
T
m q = 2.5 · 10
−2
ψ
0
=
π
4
v
∈
[0.0,0.4]m/s
FOV = 600m × 600m ξ
i0
∈ [5 · 10
3
,5 · 10
3
]
u
max,min
= ±
g
U
tan(5
π
36
)
U = 22m/s, g = 9.81m/s
Our goal is to reduce the overall uncertainty of the
icebergs. To compare the simulations with the different
value of τ we calculate the performance metric:
ς =
Z
T
0
N−1
∑
i=1
σ
i
(t)dt (24)
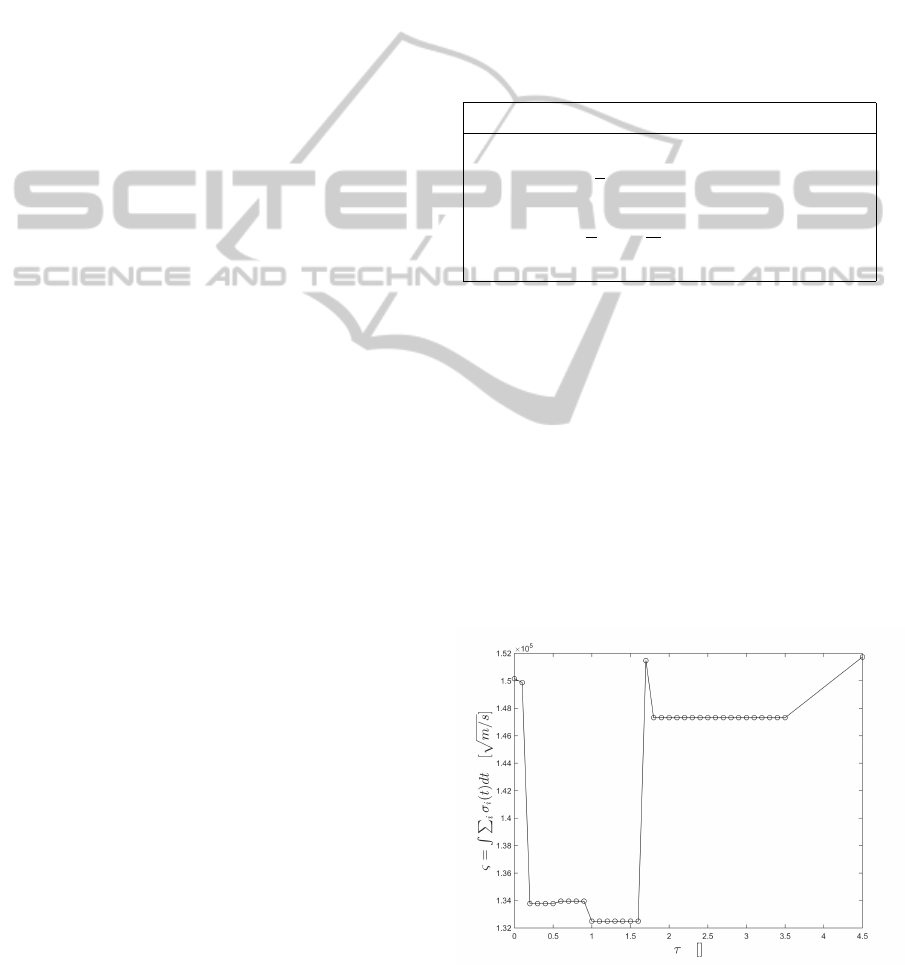
The resulting integral of the total position uncer-
tainty is shown in Figure 4 as a function of
τ
. With
the MPC-like implementation strategy presented in
this paper a high value for
τ
will result in the UAV
being stuck in a loop between two points. The value
of
τ = 4.5
equals the TSP case, which is implemented
without the MPC-strategy.
Figure 4:
ς
in relation to
τ
for the case of monitoring 12
icebergs with a single UAV. The case of
τ
= 4.5 is the TSP-
solution.
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
136
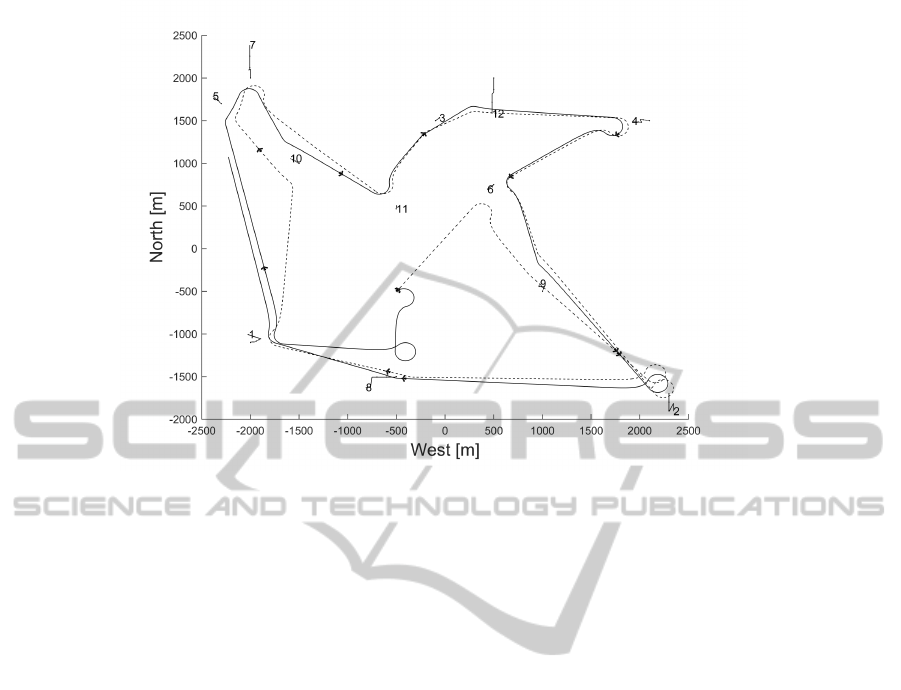
Figure 5: Simulation with 12 icebergs. The dotted path is the optimal path for this case with regard to the metric
ς
. The whole
path is the TSP solution for this case.
Figure 5 shows two simulations of case with 12
icebergs. The UAV illustrated with the blue line is the
case
τ = 1.5
, which is optimal for this case. The other
case, where the UAV is plotted with a red line is the
TSP-solution for this case.
6 DISCUSSION
The strength of the framework we present in this article
is the simplicity. The objective function from equa-
tion
(1)
is intuitive and the tuning rule from Section
3.2 makes it easy to weight between the objectives.
Furthermore, the division of the objective of iceberg
monitoring into different task makes it easy to separate
between tasks like path planning and path following.
A challenge is to weight between the two objectives.
The optimal value for
τ
will vary for each case. How-
ever, experience indicates that choosing
τ = 1
gives
a good trade-off between shortest path and highest
uncertainty first.
Another strength of the division of task for the
framework is the ability to add extra features. A reason
for monitoring iceberg could be to protect an installa-
tion or ship. In such a case it will be more important to
prioritize icebergs that are close to the object you want
to protect. We can easily include this in our objective
function by assigning different values for the variance,
q
i
, for each iceberg based on the distance the iceberg
is from our object.
7 CONCLUSIONS AND FUTURE
WORK
In this paper we look at the monitoring of a set of
icebergs using a single UAV as a mobile sensor. Each
iceberg in the set has an estimated position with an
appurtenant position uncertainty. We suggest a frame-
work for dividing the task into different subtask sepa-
rating path planning, autopilot and observer, and we
focus on the path planning. For the path planning we
come up with a strategy consisting of solving an opti-
mization problem with the icebergs as stationary. The
result of the optimization yields a sequence for visiting
the icebergs. We apply only the first iceberg in the op-
timal sequence. When the UAV discovers that iceberg,
we solve the optimization again. The advantage of
solving the optimization this way is fast computational
time and at the same time account for model inaccu-
racies and changes over time by solving the problem
often. In the optimization we use both the objective
of achieving shortest distance and visiting the iceberg
with highest position uncertainty first. To implement
the optimization formulation we use a MILP frame-
work. We also suggest a rule to help tuning between
the two objectives in the optimization formulation us-
ing a single parameter
τ
. In simulation we demonstrate
how different choices of
τ
influences the solution for
a single case. We use experience with different cases
to come with a recommendation for a value of
τ
. The
complexity of our problem is NP-complete. However,
with the number of icebergs at about 15, the compu-
MobileSensorPathPlanningforIcebergMonitoringusingaMILPFramework
137

tational time of our problem is acceptable. Also by
initializing our problem with the previous solution, we
can yield acceptable computational time for about 20
icebergs. Finally, we discuss how our framework eas-
ily can be extended. For example different weighting
between icebergs based on their location and not only
the time since their last observation.
Future work include:
•
Extend the path planning to include management
and recovery of lost icebergs.
•
Perform experiments with UAV for proof of con-
cept
• Extend the algorithm to allow multiple UAVs
REFERENCES
Alidaee, B., Wang, H. B., and Landram, F. (2009). A
note on integer programming formulations of the real-
time optimal scheduling and flight path selection of
uavs. Ieee Transactions on Control Systems Technol-
ogy, 17(4):839–843.
Applegate, D. L., Bixby, R. E., Chvatal, V., and Cook, W. J.
(2011). The Traveling Salesman Problem: a Compu-
tational Study. Princeton University Press, Princeton,
1st edition.
Bektas, T. (2006). The multiple traveling salesman problem:
an overview of formulations and solution procedures.
Omega-International Journal of Management Science,
34(3):209–219.
Caharija, W., Candeloro, M., Pettersen, K. Y., and Srensen,
A. J. (2012). Relative velocity control and integral los
for path following of underactuated surface vessels. In
Proc. of the 9th IFAC Conference on Manoeuvring and
Control of Marine Craft.
Chmaj, G. and Selvaraj, H. (2015). Distributed processing
applications for uav/drones: A survey. In Advances
in Intelligent Systems and Computing, volume 1089,
pages 449–454.
Cook, K. L. B. (2007). The silent force multiplier: The
history and role of uavs in warfare. In IEEE Aerospace
Conference, 3 - 7 March, 2007. Inst. of Elec. and Elec.
Eng. Computer Society.
Dan, S. (2006). Optimal state estimation Kalman H and
nonlinear approaches. New York: Wiley Interscience
Publication, 1st edition.
Dubins, L. E. (1957). On curves of minimal length with a
constraint on average curvature, and with prescribed
initial and terminal positions and tangents. American
Journal of mathematics, pages 497–516.
Eik, K. (2008). Review of experiences within ice and iceberg
management. Journal of Navigation, 61(04):557–572.
Eik, K. (2009). Iceberg drift modelling and validation of
applied metocean hindcast data. Cold Regions Science
and Technology, 57(2-3):67–90.
Feillet, D., Dejax, P., and Gendreau, M. (2005). Travel-
ing salesman problems with profits. Transportation
Science, 39(2):188–205.
Fossen, T. I. (2011). Handbook of marine craft hydrody-
namics and motion control. John Wiley & Sons, 1st
edition.
Grundel, D. A. and Jeffcoat, D. E. (2004). Formulation and
solution of the target visitation problem. In Collec-
tion of Technical Papers - AIAA 1st Intelligent Systems
Technical Conference, 20 - 23 September 20, 2004, vol-
ume 1, pages 1–6. American Institute of Aeronautics
and Astronautics Inc.
Haugen, J. and Imsland, L. (2013). Optimization-based
autonomous remote sensing of surface objects using
an unmanned aerial vehicle. In 12th European Control
Conference, ECC 2013, 17 - 19 July 17, 2013, pages
1242–1249. IEEE Computer Society.
IBM (2011). Ibm ilog cplex optimization studio cplex users
manual. URL: http://www.ibm.com.
Leira, F. S., Johansen, T. A., and Fossen, T. I. (2015). Auto-
matic detection, classification and tracking of objects
in the ocean surface from uavs using a thermal camera.
In IEEE Aerospace Conference, March 7-14. 2015.
Lofberg, J. (2004). Yalmip: A toolbox for modeling and
optimization in matlab. In Proceedings of the IEEE
International Symposium on Computer-Aided Control
System Design, pages 284–289.
Mahajan, A. and Ralphs, T. (2010). On the complexity of
selecting disjunctions in integer programming. SIAM
Journal on Optimization, 20(5):2181–2198.
Peng, Z. R., Liu, X. F., Zhang, L. Y., and Sun, J. (2012).
Research progress and prospect of uav applications in
transportation information collection. Jiaotong Yunshu
Gongcheng Xuebao/Journal of Traffic and Transporta-
tion Engineering, 12(6):119–126.
Pitre, R. R., Li, X. R., and DelBalzo, D. (2009). A new
performance metric for search and track missions 2:
Design and application to uav search. In 12th Interna-
tional Conference on Information Fusion, FUSION 6 -
9 July, pages 1108–1114. IEEE Computer Society.
Skoglar, P., Orguner, U., Tornqvist, D., and Gustafsson, F.
(2012). Road target search and tracking with gimballed
vision sensor on an unmanned aerial vehicle. Remote
Sensing, 4(7):2076–2111.
Timco, G., Gorman, B., Falkingham, J., and O’Connell, B.
(2005). Scoping study: Ice information requirements
for marine transportation of natural gas from the high
arctic. Technical Report, prepared for: Climate Change
Technology and Innovation Initiative Unconventional
Gas Supply.
UAV Factory (2012). Penguin b datasheet. URL:
http://www.uavfactory.com.
Walton, C. L., Gong, Q., Kaminer, I., and Royset, J. O.
(2014). Optimal motion planning for searching for
uncertain targets. In 19th World Congress The Inter-
national Federation of Automatic Control, Cape Town,
South Africa. Agust 24-29, 2014.
Watts, A. C., Ambrosia, V. G., and Hinkley, E. A. (2012).
Unmanned aircraft systems in remote sensing and sci-
entific research: Classification and considerations of
use. Remote Sensing, 4(6):1671–1692.
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
138
