
GR-TNCES: New Extensions of R-TNCES for Modelling and
Verification of Flexible Systems under Energy and Memory
Constraints
Oussama Khlifi
1,2
, Olfa Mosbahi
1
, Mohamed Khalgui
1
and Georg Frey
3
1
LISI Laboratory, INSAT, University of Carthage, Tunis, Tunisia
2
Polytechnic School of Tunisia, University of Carthage, Tunis, Tunisia
3
Chair of Automation, Saarland University, Saarbrücken, Germany
Keywords: Distributed Discrete Event Control System, Adaptive System, Reconfiguration, Modeling, Formal
Verification, Model Checking, Energy Control, Memory Control.
Abstract: This study deals with the formal modeling and verification of Adaptive Probabilistic Discrete Event Control
Systems (APDECS). A new formalism called Generalized Reconfigurable Timed Net Condition Event
Systems (GR-TNCES) is proposed for the optimal functional and temporal specification of APDECS. It is
composed of behavior and control modules. This formalism is used for the modeling and control of
unpredictable as well as predictable reconfiguration processes under memory and energy constraints. A
formal case study is proposed to illustrate the necessity of this formalism and a formal verification based on
the probabilistic model checker Prism.
1 INTRODUCTION
Adaptive Probabilistic Discrete Event Control
Systems (APDECS) such as chirurgical robots are
able to change their behaviors with an unpredictable
way during run-time processes. Reconfiguration is
the qualitative change in the structure, functionality,
and algorithms of the control systems (Radu et al.,
2011). This is due to qualitative changes of goals of
control, the controlled system or of the environment
the system behaves within. Partial failures,
breakdowns, or even human intervention may cause
such changes (Yang et al., 2013). Thus, the
development of Probabilistic Reconfigurable
Discrete Event Control Systems (PRDECS) is not an
easy activity to perform since they should be
adapted to their environment under functional,
memory, energy and real-time constraints. Many
systems and protocols run under devices with
limited memory and energy resources, so the system
could violate them during an adaptation process. For
this reason, we should have real-time reconfigurable
supervised control architecture in order to evaluate
and improve its performance. In this work, we focus
on the optimal modeling and verification of
PRDECS running under memory and energy
constraints.
In general, all requirements for DECS can be
reduced to two general properties: value correctness
and temporal correctness (Kopetz, 2003). These can
be further split up into two corresponding questions:
Will the system respond to an input change with the
correct output change (value correctness)? and Will
it do so within the correct time bounds (temporal
correctness)?
Many researchers have tried to deal with the
formal modeling of control systems with potential
reconfigurations. Wu and Zhou (2011) presented
intelligent token Petri nets. In their model, tokens
represent job instances to carry real-time knowledge
about system states and changes. It is like smart
cards in practice such that the dynamical changes of
a system can be easily modeled. Dumitrache et al.,
(2000) developed a real-time reconfigurable
supervised control architecture for large-scale
manufacturing systems in order to evaluate
performance of the control architecture. Ohashi and
Shin (2011) established a model based control
design for reconfigurable manufacturing systems
(RMS) using state transition diagrams and a general
graph representation. Kalita and Khargonekar (2002)
defined a hierarchical structure. It allows reusability
and rapid reconfigurability of the controller while
the machining system is reconfigured.
373
Khlifi O., Mosbahi O., Khalgui M. and Frey G..
GR-TNCES: New Extensions of R-TNCES for Modelling and Verification of Flexible Systems under Energy and Memory Constraints.
DOI: 10.5220/0005523503730380
In Proceedings of the 10th International Conference on Software Engineering and Applications (ICSOFT-EA-2015), pages 373-380
ISBN: 978-989-758-114-4
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

All the aforementioned studies have tried to
describe the reconfigurability and reflect the
characteristics of APDECS. Nevertheless, some of
them do not consider the temporal constraints. Most
of them do not treat unpredictable, probabilistic and
infinite characteristics of APDECS. Since these
formalisms are not able to cope with these systems,
this study tries to model APDECS using a direct
method by defining a new formalism that is an
extension of R-TNCES. We assign new controllers
for the memory and energy resources at run-time
process to cover the problem of resources violation.
We should not have a deadlock problems caused by
lack of resources at reconfiguration process. We
suppose that each firing transition consumes one
token from the energy and memory reserves. A new
formalism called Generalized Reconfigurable Timed
Net Condition/Event Systems (GR-TNCES) is
proposed for the optimal functional and temporal
specification of systems. It is defined by a behavior
module and a control module. This formalism is
used to model and verify a formal case study to
show its suitability.
The paper is organized as follows: the next
section describes the preliminaries on top of which
our new formalism is built. Section 3 introduces our
new formalism and its formalization. A case study is
provided in section 4. Finally, section 5 concludes
the paper.
2 BACKGROUND
In this section, we present reconfigurable
probabilistic discrete event systems and their formal
verification. We thereafter expose the formalisms
TNCES (Hanisch et al., 1997) and R-TNCES
(Zhang et al., 2013), which extend Petri nets for the
modeling of adaptive control systems, and the
related existing tools.
2.1 Verification of Reconfigurable
Probabilistic Systems
Adaptive probabilistic systems are modular,
extensible and reconfigurable (Sharifloo and
Spoletini, 2013). These systems have an
unpredictable behavior that could change during a
run-time process (Forejt et al., 2012). Hence, we
need an expressive formalism for their optimal
modeling and verification. CTL is used to specify
functional properties of a reconfigurable system
(Zhang et al., 2013). It offers facilities for the
specification of properties to be checked. The
process of checking whether a temporal formula
holds for a system is called model checking (Martin
and
Christian, 2009). Probabilistic model checking is
an automated method to verify quantitative
properties based on Probabilistic Computation Tree
Logic (PCTL) (Forejt et al., 2012). Due to
qualitative changes of goals of system control or of
the environment the system behaves within, we are
focusing on a new method for the optimal modeling
of probabilistic reconfigurable systems under
memory and energy constraints.
2.2 Modeling Formalisms and Tools
In this section, we introduce two formalisms
extending Petri nets which are useful to model
distributed reconfigurable control systems.
2.2.1 Timed Net Condition/Event System
A Timed Net Condition/Event Systems (TNCES)
have modular structures which can be basic or
composite (Salem et al., 2014). It allows the
representation of hierarchical models and provides a
way to express exchange of event and the state of
information. It is a suitable formalism for systematic
structured modeling of automated objects, machines
and processes (Hanisch et al., 1997). A TNCES, as
shown in Figure 1 is formalized as a tuple as
follows:
NCES = (P, T, F, W, CN, EN, C
in
,E
in
, C
out
,E
out
,V,m0)
Where:
• P (respectively, T) is a non-empty finite set
of places (respectively, transitions),
• F is a set of flow arcs F ⊆ (P × T) ∪ (T ×
P),
• W :(P × T) ∪ (T × P) →{0, 1} maps a
weight to a flow arc, W(x, y) > 0 if (x, y) ∈
F, and W(x, y)=0 otherwise, where x, y ∈ P
∪ T,
• CN (respectively, EN) is a set of condition
(respectively, event) signals with CN ⊆ (P
× T) (respectively, EN ⊆ (T × T)),
• C
in
(respectively, E
in
) is a set of condition
(respectively, event) inputs,
• C
out
(respectively, E
out
) is a set of condition
(respectively, event) outputs
• V : T →{∨, ∧} maps an event-processing
mode (
AND or OR) to each transition,
• m0: P →{0, 1} is the initial marking.
ICSOFT-EA2015-10thInternationalConferenceonSoftwareEngineeringandApplications
374
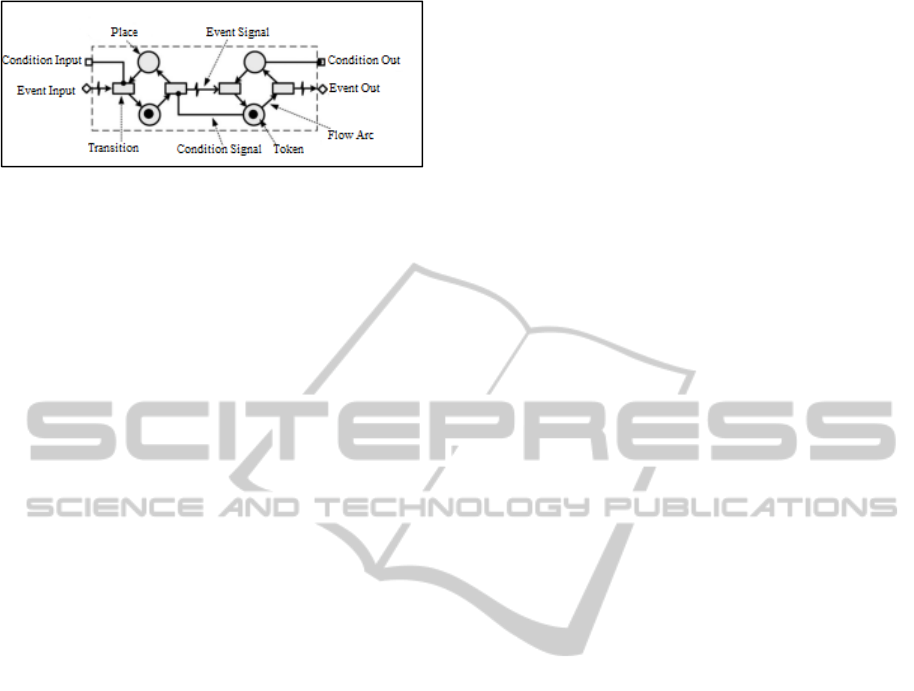
Figure 1: Example of a TNCES.
2.2.2 Reconfigurable Timed Net
Condition/Event Systems
An R-TNCES, as defined in (Zhang et al., 2013) is
an extension of the formalism TNCES with a
specific function of self-reconfiguration. It is a
structure RTN = (B, R), where R is the control
module consisting of a set of reconfiguration
functions R = {r
1,...,rm}. The reconfiguration
function is a structure r= (Cond, S, X). Cond→ (true,
false) is the precondition of r. S is the structure
modification instruction. X is the state processing
function that links the states before and after the
reconfiguration process. B is the behavior module
which is a union of multi TNCES, represented as
follows:
B =(P, T, F, W, CN, EN, DC, V, Z0) (3)
where: (i) P (respectively, T) is a superset of places
(respectively, transitions), (ii) F ⊆ (P × T) ∪ (T × P)
is a superset of flow arcs, (iii) W: (P × T) ∪ (T ×P)
→{0, 1} maps a weight to a flow arc, W(x, y) > 0 if
(x, y) ∈ F, and W(x, y)=0 otherwise, where x, y ∈ P
∪ T, (iv) CN ⊆ (P × T) (respectively, EN ⊆ (T × T))
is a superset of condition signals (respectively, event
signals), (v) DC: F ∩ (P × T) → {[l1,h1],...,[
l|F n (P ×
T)|, h|F n (P × T)|]} is a superset of time constraints on
output arcs, where ∀ i ∈ [1, |F ∩ (P × T)|], l
i, hi ∈
N, and l
i, < hi, (vi) V : T →{∨ , ∧ } maps an event-
processing mode (AND or OR) for every transition,
(vii) Z
0= (M0, D0), where M0 : P → {0, 1}is the
initial marking and D
0: P →{0} is the initial clock
position. R-TNCES is a novel formalism for
adaptive systems. But this formalism cannot deal
with probabilistic running under memory and energy
constraints.
3 CONTRIBUTION: GR-TNCES
System modeling and control is not a trivial activity
because a failure can be critical for the safety of
human beings, e.g., air and railway traffic control
(Suender et al., 2011). This process consumes an
amount of memory and energy resources that is
estimated depending on the chosen scenario. To
cover these goals, a new formalism, called (GR-
TNCES), which is an extension of Petri Nets, is
proposed. It is defined by behavior and control
modules. It is necessary to guarantee the state
feasibility before and after probabilistic
reconfigurations under memory and energy
constraints. We aim to guarantee the optimal
functional and to be sure that never we will face a
scenario in which the system has to establish a
reconfiguration process with insufficient memory or
energy resources.
3.1 Motivation
Reconfiguration can be unpredictable, i.e., we do not
have any idea about the behavior of the system in
the future (Carlo, 2011). Memory and Energy
resources are mandatory to run all processes. So,
before running the system and applying a
reconfiguration, we have to check that there are
enough memory and energy resources. We propose a
real-time probabilistic reconfigurable supervised
control architecture. We add a new parameter on the
arcs of the model to design the probability of this
TNCES branch. We design also controllers for the
supervision of the memory and energy resources
during running processes.
3.2 Formalization
We present in this section the formalism (GR-
TNCES) for the optimal modeling of unpredictable
systems under memory and energy constraints.
3.2.1 Generalized R-TNCES
We define the formalism GR-TNCES that is a
network of R-TNCES. It is a structure G = {∑ R-
TNCES}. R-TNCES = (B, R), where R is the control
module consisting of a set of reconfiguration
functions {r1, r2, r3, r4,.}. B is the behavior module
that is a union of multi TNCES, represented as
follows:
B = (P, T, F, W, CN, EN, DC, V, Z
0
)
Where:
• P (respectively, T) is a non-empty finite set of
places (respectively, transitions),
• F is a set of flow arcs F ⊆ (P × T) ∪ (T × P),
• W :(P × T) ∪ (T × P) →{0, 1} maps a weight
to a flow arc, W(x, y) > 0 if (x, y) ∈ F, and
W(x, y)=0 otherwise, where x, y ∈ P ∪ T,
GR-TNCES:NewExtensionsofR-TNCESforModellingandVerificationofFlexibleSystemsunderEnergyandMemory
Constraints
375

• CN (respectively, EN) is a set of condition
(respectively, event) signals with CN ⊆ (P × T)
(respectively, EN ⊆(T × T)),
• DC: F (P ×T) → {[l, h ]} is a superset of time
constraints on output arcs,
• V: T →{∨, ∧} maps an event-processing mode
(AND or OR) to each transition,
• Z
0
= (T0, D
0
) where T
0
: P →{0, 1} is the initial
marking and D0 : P →{0} is the initial clock
position.
Let TN = P ×T ×F ×W × CN × EN × DC × V
be the set of all feasible net structures that can be
performed by a system. Given a TNCES:
β=(P’,T’,F’,W’,CN’,V’, DC’
,Z’0), TN(β) = (P’, T’,
F’ , W’, CN’, EN’, DC’, V’) denotes its net
structure, where TN(β) ∈ ∑ TN. We have P’ ⊆ P, T’
⊆ T, F’ ⊆ F, W’⊆ W, CN’ ⊆ CN, EN’⊆ EN, DC’ ⊆
DC, and ∀t ∈ T, V’ (t) =V (t). Each reconfiguration
is controlled by the controller. It is a structure:
R = {Condition Cond, Probability P
0
’, Energy E’,
Memory M’, Structure S, State X}
Let
•r (respectively, r•) denotes the original
(respectively, target) TNCES before (respectively,
after) the reconfiguration function r is applied, where
TN(
•r), TN(r•) ∈ ∑ TN. A reconfiguration function r
is a structure r = (Cond, P
0
, E, M, S, X). A
reconfiguration r is enabled at a state if the following
conditions are fulfilled.
Cond → {true, false}: the precondition of r,
P
0
’: P
0
: F→ [0..1] TNCES probability which
could be a functional (internal to the TNCES) or a
reconfiguration probability,
E
0
’: P→ [0..max] : controls the energy
requirements by the TNCES to token number of
energy in the controller, else the second
reconfiguration probability is chosen,
M
0
’ : P → [0..max]: controls the memory
requirements by the TNCES to token number of
memory, else the second adaptation probability is
chosen,
S : TN(•r) → TN(r•) : is the structure
modification instruction for reconfiguration scenario,
X : last state (•r) → initial state (r•) : is the state
processing function, where last state (•r)
(respectively, initial state (r•)) denotes the last
(respectively, initial) state of •r (respectively, r•)
before (respectively, after) the application of r.
A state machine specified by an TNCES, which
is called Structure_changer, is defined to describe
the control module. In this state machine, each place
corresponds to a specific TNCES of the GR-TNCES
model. Thus, each transition corresponds to a
reconfiguration function. The fact that a place sp
gets a token implies that the TNCES, to which sp
corresponds, is selected. If a transition st (∀st ∈ sp
• )
fires, then it removes the token away from sp and
brings it into a place sp’
with sp’ ∈ st•. Firing st
implies that a reconfiguration function is applied.
The Structure_changer is formalized as follows:
Structure_changer = (P, T, F, V, M
0
, P
0
)
Where ∀t ∈ T, |•t| = |t•| =1, ∑M
0
(P)=1, which means
state and only one TNCES is performed at any time.
The controller manages the GR-TNCES model using
the Structure_changer model. Each place of this
structure contains the whole information about the
corresponding TNCES e.g. its energy and memory
requirements (number of states in this TNCES).
Each state consumes one token from the energy and
memory reserve. So before enabling the
reconfiguration, tokens are removed from the
reserve. Only memory tokens are added to the
model’s memory at the end of the adaptation
process. Energy reserve will be removed from the
battery. Then, the battery will be charged
periodically.
3.2.2 Dynamics of GR-TNCES
The dynamic describes the behavior of this control
operation. Before moving the token from one place
to the next state, The structure modification
instruction S guides the GR-TNCES from TN(•r) to
TN(r•), including the condition/event signals among
them. The state processing function X maps the last
state of •r before the application of r to a feasible
initial state of r•, from which the reconfigured
system goes on running. The dynamics of an GR-
TNCES is represented in this section by referring to
self-modification nets and net rewriting systems. The
states of an GR-TNCES are defined as follows.
A state of G is a pair (TN(β), State(β)), where
TN(β) denotes the net structure of G and State(β)
denotes a state of G. The evolution of an GR-
TNCES depends on what events, energy and
memory constraints (reconfiguration functions or
transitions) take place. Using this GR-TNCES, a
reconfiguration function r = (Cond, P’, E’, M, S, X)
is enabled at state (TN(β), State(β)) if the new
original following conditions are met.
1) TN(β) = TN(•r), i.e., TN(β) is equal to the net
structure of •r and if the firing time
constraints are fulfilled,
2) Cond = true: its precondition is fulfilled,
3) E
0
> Cost TNCES (E
0
’): E
0
’ (token number)
is removed from the energy reserve,
4) M
0
> Cost TNCES (M
0
’), M
0
’ (token cost) is
removed from the memory controller. When
the reconfiguration is over, these memory
ICSOFT-EA2015-10thInternationalConferenceonSoftwareEngineeringandApplications
376

tokens are added to the memory initial
reserve.
After firing a reconfiguration function r at the
state (TN(β), State(β)), the system evolves into a
new state (TN(β’), State(β’)), M
0
’ : the memory
reserve is returned to the memory controller but the
consumed energy E
0
’ is removed from the reserve
E
0
. This reserve will be charged after a time period.
For a transition t in an GR-TNCES, the first
condition of its firing is that it must be in the current
active TNCES. It should be enabled. On this basis,
the firing rule of a transition in an GR-TNCES is the
same as that in a TNCES. Note that, in an GR-
TNCES, a reconfiguration function always has a
higher priority than a transition.
4 CASE STUDY
In this paper, the authors aim just to expose this new
formalism using a simple case study. Let’s assume a
formal reconfigurable probabilistic system to be
composed of two Modules: Module1 labeled as
GRTN1 and Module2 named as GRTN2
communicating by an event signal ev0. P1 is the
initial state. The first module contains Three TNCES
with different probabilities. The first TNCES TN1 is
labeled with the probability 0.3. It is composed of 4
states (p2, p3, p4, p5) and 4 transitions (t2, t3, t4,
t5). The second TNCES TN2 has 0.1 as a reachable
probability, contains 3 states (p6, p7, p8). The last
one is composed of (p10, p11, p12, p13).
The second module GRTN2 is activated once the
third TNCES TN3 is selected by module1. It sends
an event ev
0 for the activation of module2. We
suppose that during this reconfiguration process at
the transition t1, our system has to run 5 successive
cycles of the chosen TNCES. Initially, this controller
contains 12 tokens in its energy reserve and 10
tokens in its memory reserve as shown in Figure 2.
Before applying the reconfiguration scenario, the
controller uses the Struture_changer for the
selection of the adaptation process. Figure 3 shows
the Structure_changer of the use case model. It
contains two state machines that correspond to these
two modules GRTN1 and GRTN2.
Rec1, Rec2 and Rec3 are the different
reconfiguration processes and TN1, TN2 and TN3
are respectively the 3 TNCES of the probabilistic
model. For the second module GRTN2, we have 2
places N1 and N3 to represent the TNCES. Using
this Structure_changer the memory and energy
controllers could easily supervise the general model.
This control is done through the estimation of the
amount of resources located in the places of this
TNCES. During the reconfiguration process, the
system removes the tokens of the chosen TNCES
from the system reserve (energy and memory). After
this reconfiguration the memory tokens are added to
the system’s memory once it is free and not used by
the system.
Figure 2: Use Case Controller Model.
Figure 3: Running Example Model.
GR-TNCES:NewExtensionsofR-TNCESforModellingandVerificationofFlexibleSystemsunderEnergyandMemory
Constraints
377
This case study is a useful example to present the
necessity of this new formalism for modeling finite,
probabilistic and reconfigurable systems. We start
by the deactivation of the memory and energy
controllers to test its results on the system behavior.
Then, we activate the control process. Therefore, we
explain and discuss its role and how it affects the
system’s model. A based verification model
checking technique using Prism is applied to
validate this new modeling formalism.
4.1 Verification of GR-TNCES
We use Prism as a model checker to check the safety
of each reconfiguration scenario that can be applied
to the system. The Computation Tree Logic (CTL)
(Zhang et al., 2013) and the probabilistic
computation tree logic (PCTL) (Forejt et al., 2012)
are used to specify the deadlock and the probability
of properties which will be verified on the system.
Typical properties which can be verified are
boundedness of places, liveness of transitions, and
reachability of states (Dubinin et al., 2006). We
could detect if there is a deadlock and be sure that
the model meets user requirements. To evaluate the
interest of the controllers, we should disable it to
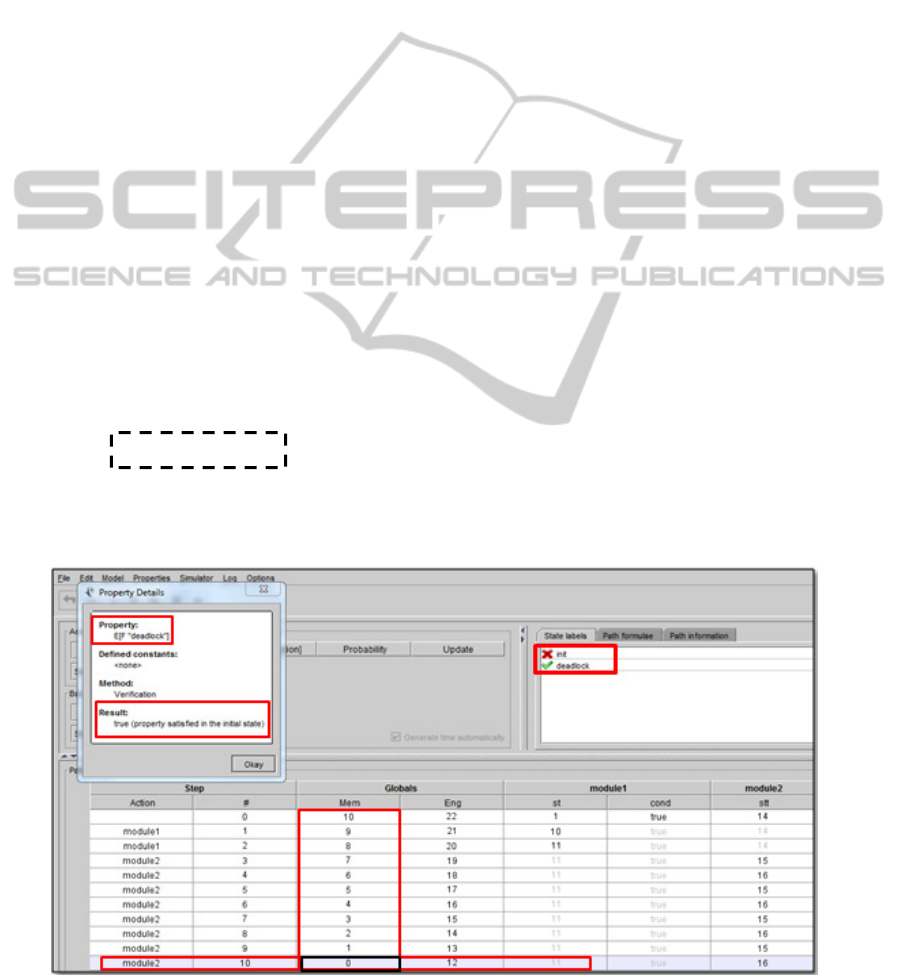
check its effects on the system. The following CTL
formula is applied for the deadlock detection:
E[F " deadlock "]
This formula is proven to be true by Prism as
shown in the screenshot in Figure 4. So, there is a
deadlock (ticked with the green color) at the state
p16. It is because the controller was inactive. It is
due to the violation of memory resources at run-time
process as shown at step 10. There are no memory
resources. The system does not manage its resources
in the optimal way. We notice that there is no
addition of the memory tokens to the memory
resources at the end of each TNCES cycle. So it is
quickly exhausted by a false using way.
When the simulation progresses to establish the
adaptation process that is composed of 5 successive
cycles, we have a blocking situation caused by the
lack of these resources. At the fifth cycle, at state
p16 the system becomes in deadlock and cannot
progress during this critical reconfiguration scenario.
This is our dangerous problem, we consider it as a
critical situation at run-time adaptation process e.g.,
the system has to fulfill a list of tasks, but it could
not establish the whole operation due to the violation
of its memory, or energy resources.
The former case shows that the system is blocked
when we disable the energy and memory controllers.
Now, we reactivate these controllers. Using this new
configuration, we try to check the system at a new
unpredictable adaptation scenario using Prism model
checker. By the activation of the control, we hope to
run all the reconfiguration processes.
We aim that the system finishes this adaptation
situation successfully without any blocking
situations. After a successful simulation, we reach
the end of the adaptation scenario. We verify that the
model meets users’ requirements. So any adaptation
process does not lead to a deadlock state as proven
by the Red Cross.
Figure 4: Prism Deadlock State Detection.
ICSOFT-EA2015-10thInternationalConferenceonSoftwareEngineeringandApplications
378
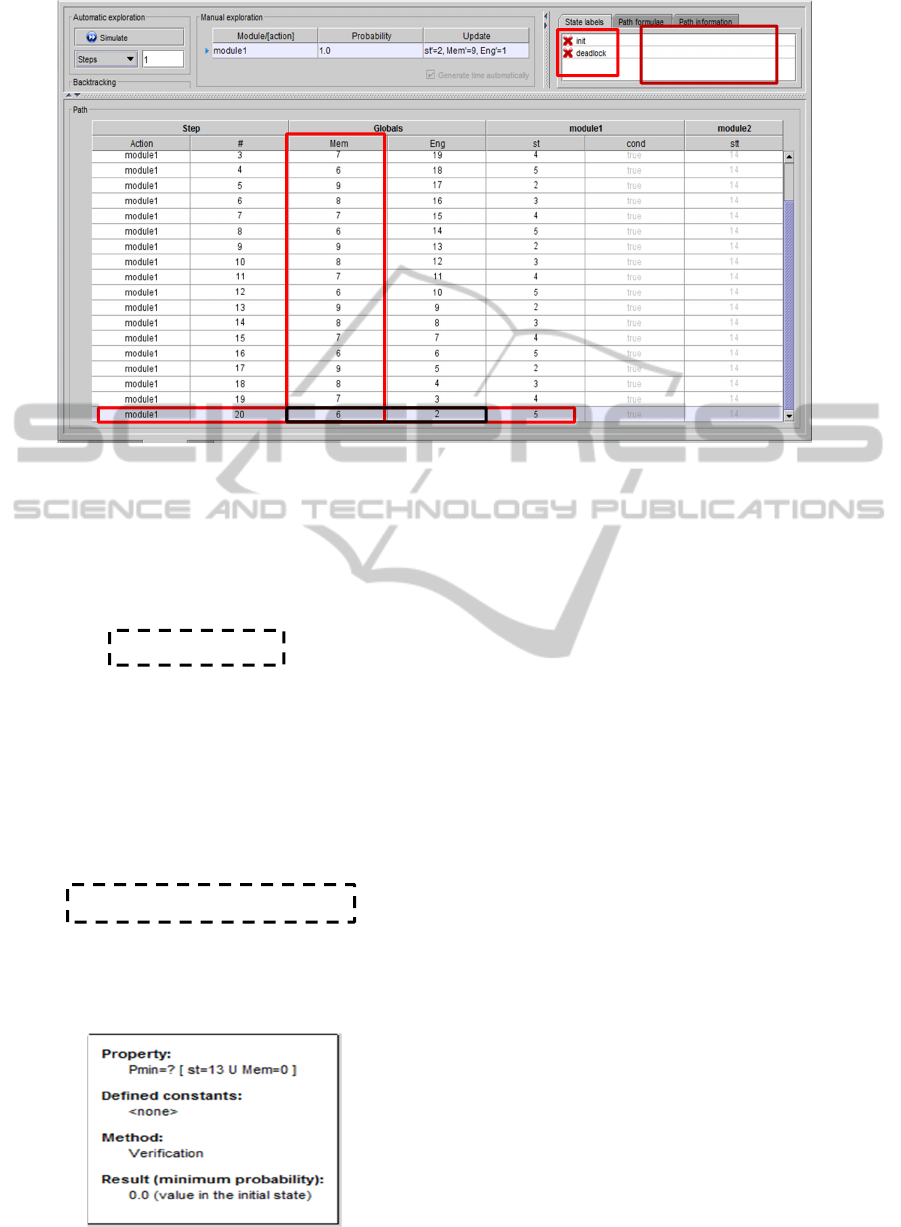
Figure 5: Simulation with Control.
We see also that the reconfiguration process is
finished and the amount of memory resources
increases at the end of each TNCES as mentioned in
the logic of this controller. The following CTL
formula is checked and proven to be false.
E[F " deadlock "]
We use now the probabilistic logic PCTL for
probabilistic quantification of described properties
(Forejt et al., 2012). We have proven that there is no
chance for the system to reach the end of the
TNCES without memory or energy resources. Prism
certifies that the probability to reach this state is
zero. The following PCTL formula is an example of
the checked properties:
Pmin=? [ st=13 U Mem=0 ]
This formula is evaluated and proven by Prism
with zero probability that the system reaches state
13which is the last state of the reconfiguration
process with no resources in reserves.
Figure 6: Prism Screenshot for Memory Verification.
4.2 Discussion: Comparison to Other
Works
As shown in this Figure 5 and Figure 6, all user
requirements are satisfied: we have done all the
reconfiguration processes without any deadlock (the
five successive cycles). The controllers run well,
they manage the memory and energy resources as
predicted before. Thanks to this new formalism GR-
TNCES, we could model and control all
unpredictable reconfigurable systems running under
memory and energy constraints. R-TNCES or its
previous extension could not deal with this kind of
systems. R-TNCES just deals with finite
reconfigurable systems; it could not model
probabilistic systems under resource constraints. It
cannot control system’s resources during a running
process or an adaptation scenario. High level Petri
Nets could also not deal with this kind of systems.
They could not express the probabilistic aspects and
the unpredictable behaviors during the running
processes.
5 CONCLUSIONS
This paper has proposed GR-TNCES, a new
formalism for modeling and verification of adaptive
probabilistic discrete event control systems running
under memory, energy and real-time constraints.
Compared to the previous studies on formal
methods, the functional and temporal specifications
No
Deadlock
GR-TNCES:NewExtensionsofR-TNCESforModellingandVerificationofFlexibleSystemsunderEnergyandMemory
Constraints
379

are optimized; new modeling formalism to cover this
systems with resources control is developed.
Therefore an GR-TNCES is a new extension of the
formalism R-TNCES. It focuses on probabilistic,
adaptive, distributed event control systems running
under some constraints. Formalization and the
dynamics of GR-TNCES are proposed. A formal
case study is taken as a whole running example.
Prism as a probabilistic model checker was used to
show that GR-TNCES is a convenient formalism for
modeling and analyzing APDECS thanks to the
formal case study. A visual environment named
ZiZo is now under building to concretize these
contributions for the modeling and control of infinite
adaptive probabilistic systems running under various
constraints. In our future works, we will apply this
formalism to model the protocol IPV4 Zeroconf that
is an adaptive probabilistic system.
REFERENCES
Zhang, J., Khalgui, M., Li, Z., Mosbahi, O., and Al-
Ahmari, A.M. (2013). “R-TNCES: A Novel
Formalism for Reconfigurable Discrete Event Control
Systems.” Systems, Man, and Cybernetics: Systems,
IEEE Transactions on 43.4 (2013): 757-772.
Radu, C., Senior, IEEE, M., Lars, G., Marta, K., Raffaela,
M., “Dynamic QoS Management and Optimization in
Service-Based Systems”, In Software Engineering,
IEEE Transactions, May. 2011.
Salem, M. O. B., Mosbahi, O., and Khalgui, M.,”Pcp-
based solution for resource sharing in reconfigurable
timed net condition/event systems”. ADECS 2014,
Hanisch, H.-M., Thieme, J., Luder, A., and Wienhold, O.
(1997). “Modeling of plc behavior by means of timed
net condition/event systems”, In Emerging
Technologies and Factory Automation Proceedings,
1997. ETFA ’97., 1997 6th International Conference.
Wu. N. Q. and Zhou, M. C. “Intelligent token Petri nets
for modelling and control of reconfigurable automated
manufacturing systems with dynamical changes,”
Trans. Inst. Meas. Control, vol. 33, no. 1, pp. 9–29,
Feb. 2011.
Dumitrache, I., Caramihai, S. I. and Stanescu, A. M.
“Intelligent agent based control systems in
manufacturing,” in Proc. IEEE Int. Symp. Intell.
Control, 2000, vol. 1, pp. 369–374.
Ohashi, K. and Shin, K. G “Model-based control for
reconfigurable manufacturing systems,” in Proc. IEEE
Int. Conf. Robot. Autom., 2011, pp. 553–558.
Kalita, D. and Khargonekar, P. P. “Formal verification for
analysis and design of logic controllers for
reconfigurable machining systems,” IEEE Trans.
Robot. Autom., vol. 18, no. 4, pp. 463–474, Aug.
2002.
H. Kopetz, “Time-triggered real-time computing”. Annual
Reviews in Control 27 (2003) 3–13, 2003.
Forejt, V., Kwiatkowska, M., Parker, D. Qu, H., and
Ujma. M., “Incremental Runtime Verification of
Probabilistic Systems”, Proc. 3rd International
Conference on Runtime Verification (RV'12), 2012.
Yang, L., Huai-Kou, M., Senior, M., Yan, M., Pan, L.,
“Nondeterministic Probabilistic Petri Net — A New
Method to Study Qualitative and Quantitative
Behaviors of System “,Journal of Computer Science
and Technology , Jan. 2013.
Suender, C., Vyatkin, V., and Zoitl, “A. Formal validation
of downtime less system evolution in embedded
automation controllers”. ACM Transactions on
Embedded Control Systems, 2011.
Dubinin, V., Hanisch, H., and Karras, S. “Building of
reachability graph extractions using a graph rewriting
system”. In proceedings of the 7th International
Conference of Science and Technology, NITis 2006.
Sharifloo, A.M, and Spoletini, P, “LOVER: Light-weight
fOrmal Verification of adaptivE systems at Run time”
Formal Aspects of Component Software, pp 170-177,
2013.
Carlo Ghezzi. “Engineering evolving and self-adaptive
systems: An overview”. In Software and Systems
Safety - Specification and Verification, pages 88{102.
2011.
Martin L. and Christian S., “A brief account of runtime
verification”. Journal of Logic and Algebraic
Programming, 78(5):293 {303, 2009}.
ICSOFT-EA2015-10thInternationalConferenceonSoftwareEngineeringandApplications
380
