
Implementation of Evolving Fuzzy Models of a Nonlinear Process
Radu-Emil Precup
1
, Emil-Ioan Voisan
1
, Emil M. Petriu
2
,
Mircea-Bogdan Radac
1
and Lucian-Ovidiu Fedorovici
1
1
Department of Automation and Applied Informatics, Politehnica University of Timisoara,
Bd. V. Parvan 2, 300223, Timisoara, Romania
2
School of Electrical Engineering and Computer Science, University of Ottawa, 800 King Edward, K1N 6N5,
Ottawa, ON, Canada
Keywords: Evolving Takagi-Sugeno-Kang Fuzzy Models, Experimental Results, Input Selection Algorithm, Pendulum
Dynamics.
Abstract: This paper presents details on the implementation of evolving Takagi-Sugeno-Kang (TSK) fuzzy models of
a nonlinear process represented by the pendulum dynamics in the framework of the representative
pendulum-crane systems. The pendulum angle is the output variable of the TSK fuzzy models that are
obtained by online identification. The rule bases and the parameters of the TSK fuzzy models are
continuously evolved by an online identification algorithm (OIA) that adds new rules with more
summarization power and modifies the existing rules and parameters. The OIA is associated with an input
selection algorithm that guides the modelling in terms of ranking the inputs according to their importance
factors. Three TSK fuzzy models evolved by the OIA are exemplified. The performance of the new
evolving TSK fuzzy models is illustrated by experimental results conducted on pendulum-crane laboratory
equipment.
1 INTRODUCTION
As shown in (Angelov, 2002; Sayed Mouchaweh et
al., 2002; Lughofer, 2011, 2013; Precup et al.,
2015), the evolving Takagi-Sugeno-Kang (TSK)
fuzzy models are characterized by the continuous
online learning for rule base learning. In this regard,
an online identification algorithm (OIA) generally
continuously evolves the rule bases and the
parameters of the TSK fuzzy models, and the models
are built online by adding new or removing old local
models (i.e., the adding mechanism). A useful
classification of OIAs dedicated to evolving TSK
fuzzy models is given in (Dovžan et al., 2014),
where the OIAs are organized in three categories.
First, the adaptive algorithms must start with the
initial structure of the TSK fuzzy model (given by
other algorithms or by the experience of the
specialist), the number of space partitions/clusters
does not change over time, and only the parameters
of the membership functions (m.f.s) and the local
models are adapted. Second, the incremental
algorithms, represented by RAN (Platt, 1991),
SONFIN (Juang and Lin, 1998), SCFNN (Lin et al.,
2001), NeuroFAST (Tzafestas and Zikidis, 2001),
DENFIS (Kasabov and Song, 2002), eTS (Angelov
and Filev, 2004), FLEXFIS (Lughofer and Klement,
2005) or PANFIS (Pratama et al., 2014), implement
only adding mechanisms. Third, the evolving
algorithms, besides the adding mechanism,
implement removing and some of them also merging
and splitting mechanisms.
Building upon the recent results on evolving
TSK fuzzy models given in (Precup et al., 2012c,
2014), this paper gives details on the implementation
of evolving TSK fuzzy models of a representative
nonlinear process represented by the pendulum
dynamics in the framework of pendulum-crane
systems. As shown in (Precup et al., 2014), the
pendulum-crane systems are important as
translational electromechanical systems. The crane
control systems can carry out either the cart position
control or the position control of the cart and the
downward or upward angle control of the pendulum
as well. The process models for crane systems can
give the cart position (Precup et al., 2014) or the
pendulum angle (Precup et al., 2012c).
Some recent examples of TSK fuzzy models for
the pendulum dynamics, i.e., the pendulum angle is
the output variable, are presented in the literature
5
Precup R., Voisan E., Petriu E., Radac M. and Fedorovici L..
Implementation of Evolving Fuzzy Models of a Nonlinear Process.
DOI: 10.5220/0005524700050014
In Proceedings of the 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2015), pages 5-14
ISBN: 978-989-758-122-9
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

with focus on fuzzy control. The parameters of TSK
fuzzy models are tuned in (Al-Hadithi et al., 2012)
by the parameters’ weighting method that exhibits
low computational effort. Fuzzy state observers are
combined with TSK fuzzy models in
(Kolemishevska-Gugulovska et al., 2012). Type-2
TSK fuzzy models that alleviate the noise of training
data and that account for mismatched m.f.s are
proposed in (Li and Sun, 2012; Li et al., 2014). TSK
fuzzy models with perturbations and state
multiplicative noises are suggested in (Chang and
Huang, 2014). The quasi-Linear Parameter Variation
formulation of TSK models is discussed in
(Allouche et al., 2014). The dynamic decoupling
concept is introduced in (Chiu, 2014) by the virtual
input dynamics, which decouples the system
uncertainty and the control signal in each rule. The
modelling errors between nonlinear dynamic
systems and TSK fuzzy models are analyzed in (Tsai
and Chen, 2014). The so-called universal TSK fuzzy
models for discrete-time non-affine nonlinear
systems are proposed in (Gao et al., 2015).
Three evolving TSK fuzzy models are proposed
in this paper, namely models with one, two and three
inputs. These models are derived by an OIA that
belongs to the incremental algorithms according to
the classification given in (Dovžan et al., 2014). The
OIA adds new rules with more summarization power
and modifies the existing rules and parameters, and
it is associated with an input selection algorithm that
guides the modelling in terms of ranking the inputs
according to their importance factors.
This paper offers twofold new contributions with
respect to the previously discussed state-of-the-art,
expressed as the functionalities of the OIA. First, the
OIA is inspired from (Angelov and Filev, 2004), and
it offers rule bases and parameters that continuously
evolve by adding new rules with more
summarization power, the existing rules and
parameters are modified in terms of using the
potentials of new data points. Second, an input
selection algorithm is inserted in the OIA.
These contributions are advantageous compared
to the state-of-the-art because, as shown in (Precup
et al., 2014) but for crane control systems, the OIA
ensures a relatively simple and transparent
implementation. In addition, the OIA derives TSK
fuzzy models with improved performance proved for
a complex nonlinear process represented by the
pendulum dynamics. This paper applies and adapts
the results obtained in (Precup et al., 2014) for the
cart position models to the pendulum angle models.
The new functionalities of the OIA and the TSK
fuzzy models proposed in this paper are compared
with the TSK fuzzy models obtained by three OIAs:
the adaptive algorithm ANFIS (Jang, 1993) and the
incremental algorithms DENFIS and FLEXFIS. The
comparison shows that the proposed evolving TSK
fuzzy models ensure the performance enhancement
on the validation data.
This paper is structured as follows: an overview
on the OIA is presented in the next section. The case
study concerning the derivation and validation of the
new TSK fuzzy models for the pendulum dynamics
in the framework of pendulum-crane systems are
treated in Section 3. The comparison of model
performance is included. The conclusions are
highlighted in Section 4.
2 ONLINE IDENTIFICATION
ALGORITHM
The steps of the OIA are obtained by the relatively
simple reformulation of the results given in
(Angelov and Filev, 2004; Precup et al., 2014)
focusing on the cost-effective implementation of the
recursive procedure. The OIA consists of the
following steps that can be organized in terms of the
flowchart, omitted here for the sake of simplicity:
Step 1. The rule base structure is initialized, i.e.,
the parameters in the rule antecedents are initialized.
This is carried out such that to have a single rule,
1
R
n
, where
R
n
is the number of rules. The
subtractive clustering (Takagi and Sugeno, 1985) is
applied to compute the parameters of the TSK fuzzy
models using the first data point
1
p
, where the
expression of the data point p at the discrete time
step k is
,]...[
121 Tn
kkkk
ppp
p
(1)
T indicates the matrix transposition, the data point in
the input-output data space
1n
R
is
,]...[
]...[][
1121
21
nTnn
T
n
TT
pppp
yzzzy
R
zp
(2)
the rule base of the affine-type TSK fuzzy models is
,...1 ,... THEN
IS AND ... AND IS IF: Rule
110
11
Rnniiii
nini
nizazaay
LTzLTzi
(3)
where
,...1 , njz
j
are the input variables, n is the
number of input variables,
,...1 ,...1 ,
njniLT
Rji
are the input linguistic terms,
i
y
is the output of the
local model in the rule consequent of rule
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
6

,...1 ,
R
nii
and
,...0 ,...1 ,
nlnia
Rli
are the
parameters in the rule consequents.
Using the algebraic product t-norm to model the
AND operator and the weighted average
defuzzification method in the TSK fuzzy model
structure, the output y of the TSK fuzzy model is
,]1[
/
1
111
R
RR
n
i
i
TT
i
nR
i
ii
n
i
i
n
i
ii
yyy
πz
(4)
where the firing degree of the rule i is
,...1 ),(...)()(
))(),...,(),((AND)(
2211
2211
Rninii
niniii
nizzz
zzz
z
(5)
the normalized firing degree of the rule i is
,...1 ,/
1
R
n
i
iii
ni
R
(6)
and the vector
,...1 ,
Ri
ni π
in (4) is the parameter
vector of the rule i (Precup et al., 2014)
,...1 ,]...[
210 R
T
iniiii
niaaaa π
(7)
The parameters are initialized in terms of (Angelov
and Filev, 2004)
,1)( , ,1 ,1
,4.0 , ,]0...00[
])(...)()([
ˆ
*
11
*
1
1
112111
pzz
IC
πππθ
Pnk
r
kR
s
T
TT
n
TT
R
(8)
where
)1()1(
nnnn
k
RR
RC
is the covariance matrix, I
is the
th
)1( nn
R
order identity matrix,
,0 ,const
is a large number,
k
θ
ˆ
is an
estimation of the parameter vector in the rule
consequents at the discrete time step k, and
,0 ,
ss
rr
is the spread of all Gaussian input m.f.s
,...1 ,...1 ,
njni
Rji
of the fuzzy sets of the input
linguistic terms
ji
LT
,...1 ,...1
],))(/4(exp[)(
2*
2
njni
zzrz
R
jijsjji
(9)
and
,...1 ,...1 ,
*
njniz
Rji
are the centres of these
m.f.s.
*
1
p
in (8) is the first cluster centre,
*
1
z
is the
centre of the rule 1 and also a projection of
*
1
p
on
the axis z defined in (2), and
)(
*
11
pP
in (8) is the
potential of
*
1
p
.
The input selection algorithm suggested in
(Precup et al., 2014) is next applied in order to select
the important input variables from all possible input
variables. This algorithm consists of the following
steps that are organized as sub-steps of this step 1 of
the OIA:
Sub-step 1.1. The algorithm is initialized by
setting the values of the
10 ,
, that represents
the importance threshold, and
10 ,
, that
stands for the significance threshold.
Sub-step 1.2. The input variable
njz
j
...1 ,
, is
applied to the initial TSK fuzzy model, the outputs
kj
y
,
of the initial TSK fuzzy model at the discrete
time moment k,
Dk ...1
, are read, where D is the
number of input-output data points. The change
range
j
z
R
for the input variable
njz
j
...1 ,
, is
calculated
,
min
1
max
1
,, kjkjz
y
D
k
y
D
k
R
j
(10)
and the importance factor
j
z
I
of the input variable
njz
j
...1 ,
, is calculated as well
.
max
1
/
jjj
zzz
R
n
j
RI
(11)
The most important input variable is characterized
by
1
j
z
I
. As shown in (Precup et al., 2014), large
values of
j
z
R
and
j
z
I
indicate a big influence of the
input variable
njz
j
...1 ,
, and small values of
j
z
R
and
j
z
I
indicate a relatively unimportant input
variable
njz
j
...1 ,
.
Sub-step 1.3. The importance of all input
variables is ranked according to the values of the
importance factors
njI
j
z
...1 ,
.
Sub-step 1.4. All input variables that fulfil the
condition
j
z
I
(12)
are removed. The condition (12) points out that the
input variable
njz
j
...1 ,
, is unimportant, so it is
justified to remove it. This sub-step gives the set of
remaining
r
n
input variables, which are selected out
of the initial n input variables,
nn
r
.
Sub-step 1.5. The closely related input variables
are recognized to carry out the independent input
variable testing by the calculation of the correlation
functions
),(
ji
zzCorr
,
1),(0
ji
zzCorr
, between
the selected input variables
i
z
and
j
z
,
r
nji ...1,
ImplementationofEvolvingFuzzyModelsofaNonlinearProcess
7

,/
)])([(),(
1
,,
ji
zz
D
k
jkjikiji
D
zzzzzzCorr
(13)
where
i
z
and
j
z
are the means of vectors
i
z
and
j
z
,
r
nji ...1,
, respectively, and
i
z
and
j
z
are the
variances of
i
z
and
j
z
,
r
nji ...1,
, respectively.
respectively. If the following condition is fulfilled:
,),(
ji
zzCorr
(14)
then the input variable
i
z
is closely related with the
input variable
j
z
. The condition (14) is used in
keeping the independent input variables among the
r
n
selected input variables. The condition (14) also
helps in removing one of the two input variables
i
z
or
j
z
. Therefore, this sub-step leads to the set of
remaining
i
n
independent input variables out of the
r
n
selected input variables,
ri
nn
.
Step 2. At the next time step, k is set to
1
kk
,
and the next data sample
k
p
is read.
Step 3. The potential of each new data sample is
computed in terms of (Precup et al., 2014)
,).( ,)(
,)( ],2
)1)(1/[()1()(
1
1
1
1
1
1
1
1
2
1
1
2
n
j
k
l
j
l
j
kk
n
j
k
l
j
lk
n
j
j
kkk
kkkk
ppp
p
kkP p
(15)
Step 4. The potentials of the centres of existing
rules (clusters) are recursively updated by (Angelov
and Filev, 2005)
,)()()(2/
)()1()(
1
1
2
)1(
*
1
*
1
*
1
*
n
j
j
kklklk
lklk
dPPk
PkP
pp
pp
(16)
where
)(
*
lk
P p
is the potential at the discrete time
step
k of the cluster centre, which is a prototype of
the rule l.
Step 5. The possible modification or upgrade of
the rule base structure is carried out using, as
described in (Angelov and Filev, 2004; Precup et al.,
2014), the potential of the new data compared to the
potential of existing rules’ centres. The rule base
structure is modified if certain conditions are
fulfilled.
Step 6. The parameters in the rule consequents
are updated using the Recursive Least Squares
(RLS) algorithm (Takagi and Sugeno, 1985; Chiu,
1994)
,...2 ,
1
),
ˆ
(
ˆˆ
111
1111
1
1111
Dk
y
kk
T
k
k
T
kkk
kk
k
T
kkkkkk
ψCψ
CψψC
CC
θψψCθθ
(17)
where the initial conditions are given in (4), and the
output of the TSK fuzzy model in (4) is expressed in
terms of the vector form
].] 1[...] 1[] 1[[
,]...[ ,
21
21
T
n
TT
TT
n
TTT
R
R
y
zzzψ
πππθθψ
(18)
Step 7. The output of the evolving TSK fuzzy model
at the next discrete time step
1k
is predicted using
the particular form of (18)
.
ˆ
ˆ
1 k
T
kk
y θψ
(19)
The algorithm continues with the step 2 until all data
points from the set of input-output data
}...1|{ Dk
k
p
(20)
are read. The step 1 is conducted offline, and the
steps 2 to 7 are conducted online.
3 FUZZY MODELS AND
EXPERIMENTAL VALIDATION
A laboratory setup that contains a pendulum-cart
system described in (Turnau et al., 2008) has been
used in the development and validation of the
evolving TSK fuzzy models. The state equations of
the process in the pendulum-cart system are
presented in (21).
The variables in (21) are:
1
x
– the cart position
(the distance between the cart and the centre of the
rail),
2
x
– the angle between the upward vertical and
the ray pointing at the centre of mass cart,
3
x
– the
cart velocity,
4
x
– the pendulum angular velocity, u
– the control signal represented by a constrained
PWM voltage signal,
0||
max
uu
,
c
m
– the
equivalent mass of the cart,
P
m
– the mass of the
pole and load, and
d
l
– the distance from the axis of
rotation to the centre of mass. The parameters in
(21) are:
p
J
– the moment of inertia of the
pendulum-cart system with respect to the axis of
rotation,
1
p
– the ratio between the control force and
the control signal,
2
p
– the ratio between the control
force and
3
x
,
c
f
– the dynamic cart coefficient, and
p
f
– the rotational friction coefficient. The
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
8
13
24
4
2
23
1
34222
2
2
2
2
23
1
4422
,
,
()
[ sin ] [sin ]cos
()() () ()
/[ cos ],
()
()
1
[ sin ]cos[sin
() ()
p p
c
cp cp cp cp
dd d d
p
cp
d
c
cp cp
dd
xx
xx
Jfx
fpx
pu
x
xx gx x
mml mml mml mml
J
x
mml
fpx
pu
xxxxg
mml mml l
4
2
2
2
2
]
()
/[ cos ],
()
p
cp
d
p
cp
d
fx
x
mml
J
x
mml
(21)
parameter values used in the experimental setup are
(Turnau et al., 2008; Precup et al., 2014)
s/rad. m N 1065.6 /m, N 5.0
s/m, N 548.0 N, 4.9
,mkg 00292.0 m, 0110
kg, 052.0 kg, 76.0 ,5.0
5
21
2
max
pc
pd
pc
fsf
pp
J.l
mmu
(22)
The OIA presented in the previous sections has been
applied in order to obtain the evolving TSK fuzzy
models of the pendulum dynamics, i.e.
2
xy
. This
section gives a part of the results. The OIA has been
coded as an extension of the implementation in
terms of eFS Lab (Ramos and Dourado, 2004; Aires
et al., 2009) of the OIAs given in (Angelov and
Filev, 2004; Precup et al., 2014).
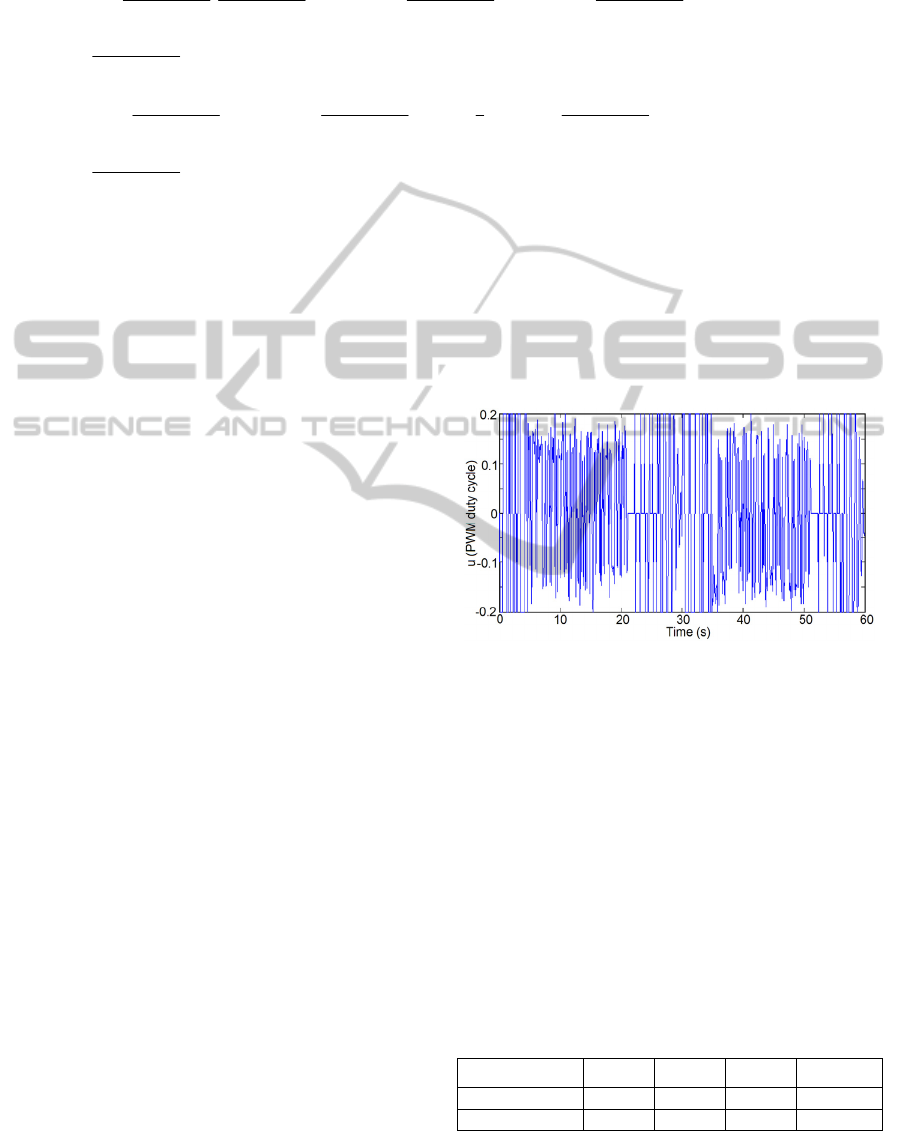
Setting the sampling period to 0.01 s, the control
signal
u has been generated as two weighted sums of
pseudo-random binary signals according to Figure 1
that covers different ranges of magnitudes. As
shown in (Precup et al., 2012c, 2014), this process
input has been applied to the laboratory setup to
generate the input-output data points
....1 ),,( Dky
kk
z
Figure 1 leads to a total number
of 6000 data points separated in training data and
validation data. The first
2500D
data points (the
time frame from 0 s to 25 s) in Figure 1 belong to
the validation data, the rest of
3500D
data points
(the time frame from 25 s to 60 s) in Figure 1 belong
to the testing (validation) data, and the process
output
y will be illustrated as follows.
The input selection algorithm included in the
step 1 of the OIA has been applied for three values
of the importance threshold, namely
4.0
,
3.0
and
2.0
, and one value of the
significance threshold,
5.0
. This leads to three
TSK fuzzy models with the following inputs: the
TSK fuzzy model 1, with the input
1k
u
, the TSK
fuzzy model 2 with the inputs
1k
u
and
1k
y
, and the
TSK fuzzy model 3 with the inputs
1k
u
,
1k
y
and
2k
y
. The output of these three TSK fuzzy models is
k
y
. The inputs of the fuzzy models have been
obtained from delayed system inputs and/or outputs
extracted from the training and validation data sets.
The value of the parameter
in the step 1 of the
OIA has been set to
10000
.
Figure 1: Control signal versus time: training data and
testing data.
The TSK fuzzy model 1 has evolved to
2
R
n
rules.
The parameter values of the TSK fuzzy model 1,
computed by the OIA for
1n
, are presented in
Table 1.
The evolutions of the system output (i.e., the
pendulum angle)
y versus time of the TSK fuzzy
model 1 and of the real-world process (the
laboratory setup) are presented in Figure 2. Figure 2
gives the responses of the TSK fuzzy model 1 and of
the process for the validation data and shows the
poor behaviour of this model. The system output for
the validation data is not illustrated as follows.
Table 1: Parameter values of TSK fuzzy model 1.
Rule number i
*
1i
z
s
r
0i
a
1i
a
1 0 0.0424 5.3009 –1.6296
2 0.1156 0.0424 5.3689 0.3121
ImplementationofEvolvingFuzzyModelsofaNonlinearProcess
9
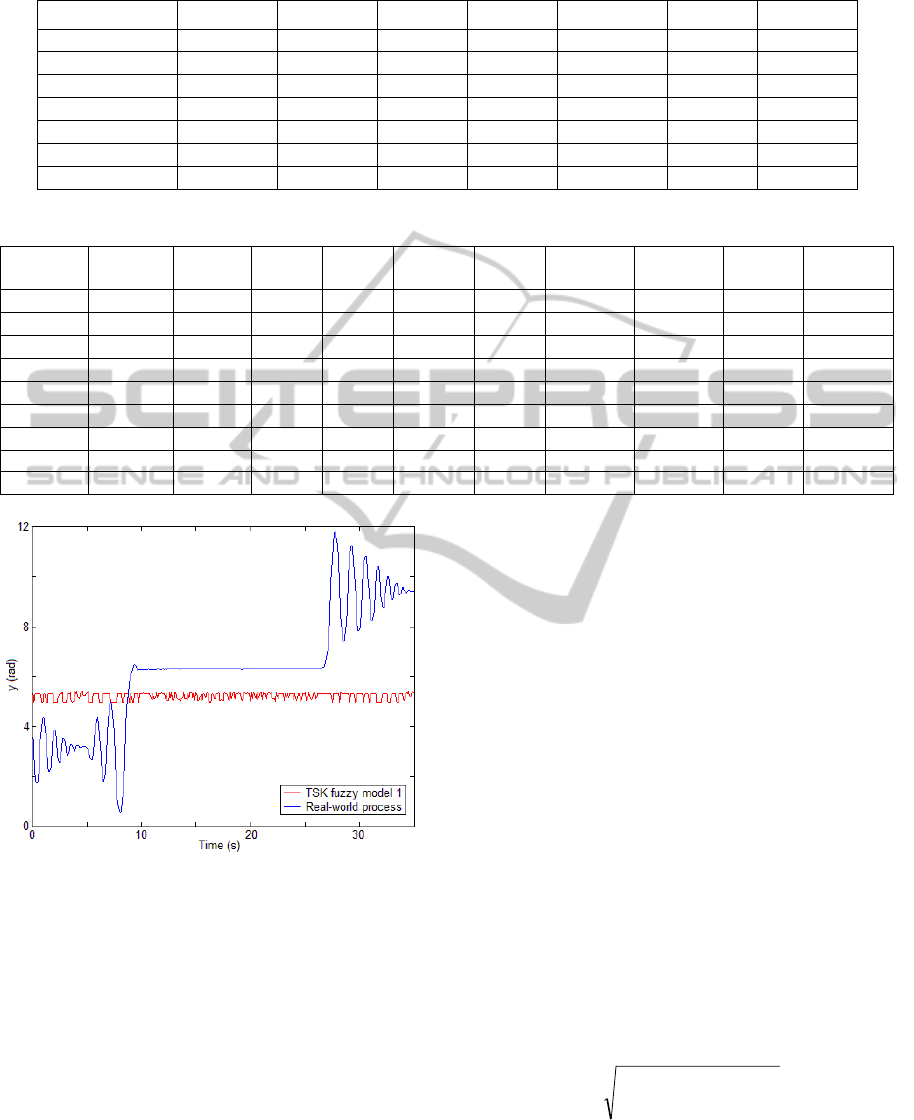
Table 2: Parameter values of TSK fuzzy model 2.
Rule number i
*
1i
z
*
2i
z
1s
r
2s
r
0i
a
1i
a
2i
a
1 0 0 0.0424 1.2502 0.6903 1.0025 0.4226
2
–0.1167
3.1861 0.0424 1.2502 0.0639
–0.5125
0.9956
3
–0.1167
2.3332 0.0424 1.2502 0.6877
–1.1108
0.6857
4 0 6.2186 0.0424 1.2502
–0.4733
0.0435 1.0744
5
–0.1167
6.2186 0.0424 1.2502
–0.6956 –0.0229
1.1099
6 0 6.1161 0.0424 1.2502
–0.4597 –0.1376
1.0472
7 0 5.9841 0.0424 1.2502
–0.5298
0.7453 1.0385
Table 3: Parameter values of TSK fuzzy model 3.
Rule
number i
*
1i
z
*
2i
z
*
3i
z
1s
r
2s
r
3s
r
0i
a
1i
a
2i
a
3i
a
1 0 0 0 0.0424 1.2502 1.2502 0.1161 0.2383 2.1021
–0.9404
2
–0.1175
3.1861 0 0.0424 1.2502 1.2502 0.4574
–0.0915
0.8872 0.0096
3
–0.1175
3.5558 3.4423 0.0424 1.2502 1.2502
–0.2529 –0.0368
1.8198
–0.7841
4 0.1293 1.9835 1.9643 0.0424 1.2502 1.2502 0.2798 0.1254 2.0211
–1.0080
5
–0.1175
2.3332 1.9643 0.0424 1.2502 1.2502 0.8986
–0.2488
1.5784
–0.8115
6
–0.1175
6.2186 6.2282 0.0424 1.2502 1.2502 0.0827
–0.0133
1.4412
–0.4550
7 0 6.2186 6.2282 0.0424 1.2502 1.2502
–0.6813
0.0502 1.6820
–0.5745
8 0 6.1161 6.2282 0.0424 1.2502 1.2502 0.2990 0.5435 0.8706 0.0532
9 0 5.9841 6.1161 0.0424 1.2502 1.2502
–1.2067
0.1298 2.1044
–0.9259
Figure 2: Pendulum angle versus time of TSK fuzzy
model 1 and of real-world process for validation data.
The TSK fuzzy model 2 has evolved to
7
R
n
rules. The parameter values of the TSK fuzzy model
2, computed by the OIA for
2n
, are presented in
Table 2.
The time responses of
y of the TSK fuzzy model
2 and of the real-world process are presented in
Figure 3. Figure 3 shows a slightly improved
behaviour compared to Figure 2.
The TSK fuzzy model 3 has evolved to
9
R
n
rules.
The parameter values of the TSK fuzzy model 3,
computed by the OIA for
3n
, are presented in
Table 3.
The time responses of
y versus time of the TSK
fuzzy model 3 and of the real-world process are
illustrated in Figure 4. Figure 4 shows an improved
behaviour with respect to Figure 3.
As pointed out in Section 1, the OIA and the
TSK fuzzy model performance (as the result of the
OIA) have been compared with the following three
OIAs that lead to evolving TSK fuzzy models:
ANFIS, DENFIS and FLEXFIS. Since Figure 2
illustrates the poor performance of the TSK fuzzy
model 1, the comparison has been focused on the
TSK fuzzy models 2 and 3. Two TSK fuzzy models
have been obtained for each OIA. The fair
comparison of all fuzzy models has been conducted
in terms of using the same inputs, numbers and
shapes of m.f.s as those of the TSK fuzzy models 2
and 3, and the numbers of rules
R
n
have been set
such that to be very close.
The comparison of the models is carried out in
terms of the root mean square error (RMSE)
between the pendulum angles of the TSK fuzzy
models and of the real-world process. The
expression of this global performance index is
,)()/1(
1
2
,2
D
k
kk
xyDRMSE
(23)
where
k
y
is the output (the pendulum angle) of the
TSK fuzzy models and
k
x
,2
is the output (the
pendulum angle) of the laboratory setup at the
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
10

discrete time moment k. The RMSE has been
computed and measured for the training data and for
the testing (validation) data.
Figure 3: Pendulum angle versus time of TSK fuzzy
model 2 and of real-world process for validation data.
The results obtained for the eight TSK fuzzy
models on the testing data are summarized in Table
4. Table 4 includes the numbers of parameters
P
n
of
the final evolved TSK fuzzy models.
Table 4 and Figures 2, 3 and 4 prove that the best
performance on the testing data is exhibited by the
TSK fuzzy model 3 obtained by the OIA presented
in Section 2. Table 4 illustrates the performance
improvement achieved by the evolving TSK fuzzy
models obtained by proposed OIA compared to
other three OIAs. In addition, the performance
improvement with respect to another implementation
of the OIA given in (Precup et al., 2012c) is ensured.
The results presented in Table 5 and in Figures 3
and 4 also show that the performance of the
proposed TSK fuzzy models are consistent with the
testing data. However, a different scaling used, for
example, in Figures 3 and 4, could show in a more
illustrative way the differences.
As expected, Table 4 confirms that more inputs
lead to improved model performance. But the
selection of the input variables is carried out
systematically in the step 1 of the OIA by that input
selection algorithm that guides the modelling.
The models and the performance depend on the
values of the parameters
and
. Different models
and results for these models are obtained for other
values of these two parameters.
Based on these experimental results, presented
only for the testing data and not for the validation
data, the proposed evolving TSK fuzzy models can
be accepted as very close to the real-world nonlinear
Figure 4: Pendulum angle versus time of TSK fuzzy
model 3 and of real-world process for validation data.
Table 4: Results for eight TSK fuzzy models on testing
data.
TSK
fuzzy
model
OIA
R
n
P
n
RMSE
2 Section 2 7 49 0.1672
2 ANFIS 8 56 0.2537
2 DENFIS 8 56 0.4094
2 FLEXFIS 7 49 0.3011
3 Section 2 9 90 0.1505
3 ANFIS 12 120 0.1814
3 DENFIS 10 90 0.3392
3 FLEXFIS 10 90 0.2506
process. However, different conclusions can be
drawn if other nonlinear processes are considered
(Precup et al., 2004; Deliparaschos et al., 2006;
Gusikhin et al., 2007; Precup and Preitl, 2007;
Ferreira and Ruano, 2009; Filip and Leiviskä, 2009;
Bošnak et al., 2012; Precup et al., 2012b; Guerra et
al., 2012; Lam and Lauber, 2013) if they are viewed
such that to belong to control systems. The OIA
should be reorganized such that to enable the cost-
effective implementation of the control solutions
(Precup et al., 2011, 2012a, 2012d;
4 CONCLUSIONS
This paper has given implementation details on an
OIA, which continuously evolves the rule bases and
the parameters of TSK fuzzy models by adding new
rules with more summarization power and
modifying the existing rules and parameters. The
OIA consists of seven steps, and the step 1 includes
an input selection algorithm that guides the
ImplementationofEvolvingFuzzyModelsofaNonlinearProcess
11

modelling in terms of ranking the inputs according
to their importance factors.
The main advantages of the new results given in
this paper are the simplicity and transparency of the
OIA, the simplicity of the evolving TSK fuzzy
models and their consistency with both the testing
data. These advantages have been proved by real-
time experimental results related to the fuzzy
modelling of a representative nonlinear process, i.e.,
the pendulum dynamics in the framework of
pendulum-crane systems.
The OIA has been implemented by the extension
of the OIAs given in (Angelov and Filev, 2004;
Precup et al., 2014) using the core of eFS Lab
reported in (Ramos and Dourado, 2004; Aires et al.,
2009). The comparison of the experimental results
shows the performance improvement exhibited by
two proposed TSK fuzzy models with respect to
other fuzzy models obtained by similar OIAs.
Future research will concern the further
performance improvement of the TSK fuzzy models.
Several optimization algorithms including nature-
inspired optimization algorithms (Duleba and
Sasiadek, 2003; Haber et al., 2009; Valdez et al.,
2011; Johanyák and Papp, 2012; Vaščák and Paľa,
2012; David et al., 2013; El Amraoui and
Mesghouni, 2014; Osaba et al., 2014; Tang et al.,
2014; Savio et al., 2014; Zhang et al., 2014) will be
incorporated to replace the RLS algorithm in the
step 6 of the OIA. The OIA will be applied to other
representative nonlinear processes as well. Since the
goal of the development of these TSK fuzzy models
is the model-based design of fuzzy control systems,
the models will be included in such control system
structures.
ACKNOWLEDGEMENTS
This work was supported by a grant from the
Romanian National Authority for Scientific
Research, CNCS – UEFISCDI, project number PN-
II-ID-PCE-2011-3-0109, by a grant from the
Partnerships in priority areas – PN II program of the
Romanian National Authority for Scientific
Research ANCS, CNDI – UEFISCDI, project
number PN-II-PT-PCCA-2011-3.2-0732, by grants
from the Partnerships in priority areas – PN II
program of the Romanian Ministry of Education and
Research (MEdC) – the Executive Agency for
Higher Education, Research, Development and
Innovation Funding (UEFISCDI), project numbers
PN-II-PT-PCCA-2013-4-0544 and PN-II-PT-PCCA-
2013-4-0070, and by a grant from the NSERC of
Canada.
REFERENCES
Aires, L., Araújo, J., Dourado, A., 2009. Industrial
monitoring by evolving fuzzy systems. In
Proceedings
of Joint 2009 IFSA World Congress and 2009
EUSFLAT Conference
. Lisbon, Portugal, 1358-1363.
Al-Hadithi, B. M., Jiménez, A., Matía, F., 2012. A new
approach to fuzzy estimation of Takagi-Sugeno model
and its applications to optimal control for nonlinear
systems.
Applied Soft Computing. 12, 280-290.
Allouche, B., Vermeiren, L., Dequidt, A., Dambrine, M.,
2014. Step-crossing feasibility of two-wheeled
transporter: Analysis based on Takagi-Sugeno
descriptor approach. In
Proceedings of IEEE 17
th
International Conference on Intelligent
Transportation Systems
. Qingdao, China, 2675-2680.
Angelov, P., 2002.
Evolving Rule based Models: A Tool
for Design of Flexible Adaptive Systems
. Berlin,
Heidelberg: Springer-Verlag.
Angelov, P., Filev, D., 2004. An approach to online
identification of Takagi-Sugeno fuzzy models.
IEEE
Transactions on Systems, Man, and Cybernetics, Part
B: Cybernetic
s. 34, 484-498.
Angelov, P., Filev, D., 2005. Simpl_eTS: A simplified
method for learning evolving Takagi-Sugeno fuzzy
models. In
Proceedings of 14
th
IEEE International
Conference on Fuzzy Systems
. Reno, NV, USA, 1068-
1073.
Bošnak, M., Matko, D., Blažič, S., 2012. Quadrocopter
control using an on-board video system with off-board
processing.
Robotics and Autonomous Systems. 60,
657-667.
Chang, W.-J., Huang, B.-J., 2014. Robust fuzzy control
subject to state variance and passivity constraints for
perturbed nonlinear systems with multiplicative
noises.
ISA Transactions. 53, 1787-1795.
Chiu, C.-S., 2014. A dynamic decoupling approach to
robust T-S fuzzy model-based control.
IEEE
Transactions on Fuzzy Systems
. 22, 1088-1100.
Chiu, S. L., 1994. Fuzzy model identification based on
cluster estimation.
Journal of Intelligent and Fuzzy
Systems.
2, 267-278.
David, R.-C., Precup, R.-E., Petriu, E. M., Radac, M.-B.,
Preitl, S., 2013. Gravitational search algorithm-based
design of fuzzy control systems with a reduced
parametric sensitivity.
Information Sciences. 247, 154-
1733.
Deliparaschos, K. M., Nenedakis, F. I., Tzafestas, S. G.,
2006. Design and implementation of a fast digital
fuzzy logic controller using FPGA technology.
Journal of Intelligent and Robotic Systems. 45, 77-96.
Dovžan, D., Logar, V., Škrjanc, I., 2014. Implementation
of an evolving Fuzzy Model (eFuMo) in a monitoring
system for a waste-water treatment process.
IEEE
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
12

Transactions on Fuzzy Systems. DOI
10.1109/TFUZZ.2014.2379252.
Duleba, I., Sasiadek, J. Z., 2003. Nonholonomic motion
planning based on Newton algorithm with energy
optimization.
IEEE Transactions on Control Systems
Technology
. 11, 355-363.
El Amraoui, A., Mesghouni, K., 2014. Optimization of a
train traffic management problem under uncertainties
and disruptions.
Studies in Informatics and Control.
23, 313-323.
Ferreira, P. M., Ruano, A. E., 2009. On-line sliding-
window methods for process model adaptation.
IEEE
Transactions on Instrumentation and Measurement
.
58, 3012-3020.
Filip, F.-G., Leiviskä, K., 2009. Large-scale complex
systems. In
Springer Handbook of Automation, S. Y.
Nof, Ed. Berlin, Heidelberg: Springer-Verlag, 619-
638.
Gao, Q., Feng, G., Dong, D., Liu, L., 2015. Universal
fuzzy models and universal fuzzy controllers for
discrete-time nonlinear systems.
IEEE Transactions
on Cybernetics
. 54, 880-887.
Guerra, T.-M., Bernal, M., Guelton, K., Labiod, S., 2012.
Non-quadratic local stabilization for continuous-time
Takagi-Sugeno models.
Fuzzy Sets and Systems. 201,
40-54.
Gusikhin, O. Y., Rychtyckyj, N., Filev, D., 2007.
Intelligent systems in the automotive industry:
applications and trends.
Knowledge and Information
Systems
. 12, 147-168.
Haber, R. E., Haber-Haber, R., Jiménez, A., Galán, R.,
2009. An optimal fuzzy control system in a network
environment based on simulated annealing. An
application to a drilling process.
Applied Soft
Computing
. 9, 889-895.
Jang, J.-S. R., 1993. ANFIS: Adaptive-Network-based
Fuzzy Inference System.
IEEE Transactions on
Systems, Man, and Cybernetics
. 23, 665-685.
Johanyák, Z. C., Papp, O., 2012. A hybrid algorithm for
parameter tuning in fuzzy model identification.
Acta
Polytechnica Hungarica
. 9, 153-165.
Juang, C.-F., Lin, C.-T., 1998. An on-line self-
constructing neural fuzzy inference network and its
applications.
IEEE Transactions on Fuzzy Systems. 6,
12-32, 1998.
Kasabov, N. K., Song, Q., 2002. DENFIS: Dynamic
Evolving Neural-Fuzzy Inference System and its
application for time-series prediction.
IEEE
Transactions on Fuzzy Systems
. 10, 144-154.
Kolemishevska-Gugulovska, T., Stankovski, M., Rudas, I.
J., Jiang, N., Jing, J., 2012. A min-max control
synthesis for uncertain nonlinear systems based on
fuzzy T-S model. In
Proceedings of 6
th
IEEE
International Conference Intelligent Systems
. Sofia,
Bulgaria, 303-310.
Lam, H. K., Lauber, J., 2013. Membership-function-
dependent stability analysis of fuzzy-model-based
control systems using fuzzy Lyapunov functions.
Information Sciences. 232, 253-266.
Li, H., Sun, X., Shi, P., Lam, H.-K., 2015. Control design
of interval type-2 fuzzy systems with actuator fault:
Sampled-data control approach.
Information Sciences.
302, 1-13.
Li, Y.-M., Sun, Y.-Y., 2012. Type-2 T-S fuzzy impulsive
control of nonlinear systems.
Applied Mathematical
Modelling
. 36, 2710-2723.
Lin, F.-J., Lin, C.-H., Shen, P.-H., 2001. Self-constructing
fuzzy neural network speed controller for permanent-
magnet synchronous motor drive.
IEEE Transactions
on Fuzzy Systems
. 9, 751-759.
Lughofer, E., 2011.
Evolving Fuzzy Systems -
Methodologies, Advanced Concepts and Applications
.
Berlin, Heidelberg: Springer-Verlag.
Lughofer, E., 2013. On-line assurance of interpretability
criteria in evolving fuzzy systems - achievements, new
concepts and open issues.
Information Sciences. 251,
22-46.
Lughofer, E., Klement, E. P., 2005. FLEXFIS: A variant
for incremental learning of Takagi-Sugeno fuzzy
systems. In
Proceedings of 14
th
IEEE International
Conference on Fuzzy Systems
. Reno, NV, USA, 915-
920.
Osaba, E., Diaz, F., Onieva, E., Carballedo, R., Perallos,
A., 2014. AMCPA: A population metaheuristic with
adaptive crossover probability and multi-crossover
mechanism for solving combinatorial optimization
problems.
International Journal of Artificial
Intelligence
. 12, 1-23.
Platt, J., 1991. A resource allocating network for function
interpolation.
Neural Computation. 3, 213-225.
Pratama, M., Anavatti, S. G., Angelov, P., Lughofer, E.,
2014. PANFIS: A novel incremental learning
machine.
IEEE Transactions on Neural Networks and
Learning Systems
. 25, 55-68.
Precup, R.-E., Angelov, P., Costa, B. S. J., Sayed-
Mouchaweh, M., 2015. An overview on fault
diagnosis and nature-inspired optimal control of
industrial process applications.
Computers in Industry.
DOI: 10.1016/j.compind.2015.03.001.
Precup, R.-E., David, R.-C., Petriu, E. M., Preitl, S.,
Radac, M.-B., 2012a. Novel adaptive gravitational
search algorithm for fuzzy controlled servo systems.
IEEE Transactions on Industrial Informatics. 8, 791-
800.
Precup, R.-E., Dragos, C.-A., Preitl, S., Radac, M.-B.,
Petriu, E. M., 2012b. Novel tensor product models for
automatic transmission system control.
IEEE Systems
Journal
. 6, 488-498.
Precup, R.-E., Filip, H.-I., Radac, M.-B., Petriu, E. M.,
Preitl, S., Dragos, C.-A., 2014. Online identification of
evolving Takagi-Sugeno-Kang fuzzy models for crane
systems.
Applied Soft Computing. 24, 1155-1163.
Precup, R.-E., Filip, H.-I., Radac, M.-B., Pozna, C.,
Dragos, C.-A., Preitl, S., 2012c. Experimental results
of evolving Takagi-Sugeno fuzzy models for a
nonlinear benchmark. In
Proceedings of 2012 IEEE
3
rd
International Conference on Cognitive
Infocommunications
. Kosice, Slovakia, 567-572.
ImplementationofEvolvingFuzzyModelsofaNonlinearProcess
13

Precup, R.-E., Preitl, S., 2007. PI-fuzzy controllers for
integral plants to ensure robust stability.
Information
Sciences
. 177, 4410-4429.
Precup, R.-E., Preitl, S., Balas, M., Balas, V., 2004. Fuzzy
controllers for tire slip control in anti-lock braking
systems. In
Proceedings of IEEE International
Conference on Fuzzy Systems
. Budapest, Hungary, 3,
1317-1322.
Precup, R.-E., Preitl, S., Radac, M.-B., Petriu, E. M.,
Dragos, C.-A., Tar, J. K., 2011. Experiment-based
teaching in advanced control engineering.
IEEE
Transactions on Education
. 54, 345-355.
Precup, R.-E., Tomescu, M. L., Radac, M.-B., Petriu, E.
M., Preitl, S., Dragos, C.-A., 2012d. Iterative
performance improvement of fuzzy control systems
for three tank systems.
Expert Systems with
Applications
. 39, 8288-8299.
Ramos, J. V., Dourado, A., 2004. On line interpretability
by rule base simplification and reduction. In
Proceedings of European Symposium on Intelligent
Technologies, Hybrid Systems and Their
Implementation on Smart Adaptive Systems
. Aachen,
Germany, 1-6.
Sayed Mouchaweh, M., Devillez, A., Villermain Lecolier,
G., Billaudel, P., 2002. Incremental learning in fuzzy
pattern matching.
Fuzzy Sets and Systems. 132, 49-62.
Savio, M. R. D., Sankar, A., Vijayarajan, N. R., 2014. A
novel enumeration strategy of maximal bicliques from
3-dimensional symmetric adjacency matrix.
International Journal of Artificial Intelligence. 12, 42-
56.
Takagi, T., Sugeno, M., 1985. Fuzzy identification of
systems and its application to modeling and control.
IEEE Transactions on Systems, Man, and Cybernetics.
15, 116-132.
Tang, L., Zhao, Y., Liu, J., 2014. An improved differential
evolution algorithm for practical dynamic scheduling
in steelmaking-continuous casting production.
IEEE
Transactions on Evolutionary Computation
. 18, 209-
225.
Tsai, P.-W., Chen, C.-W., 2014, Novel criterion for
nonlinear time-delay systems using LMI fuzzy
Lyapunov method.
Applied Soft Computing. 25, 461-
472.
Turnau, A., Pilat, A., Hajduk, K., Korytowski, A., Grega,
W., Gorczyca, P., Kolek, K., Rosól, M., 2008.
Pendulum-Cart System User’s Manual. Krakow:
INTECO Ltd.
Tzafestas, S. G., Zikidis, K. C., 2001. NeuroFAST: On-
line neuro-fuzzy ART-based structure and parameter
learning TSK model.
IEEE Transactions on Systems
Man and Cybernetics, Part B: Cybernetics
. 31, 797-
802.
Valdez, F., Melin, P., Castillo, O., 2011. An improved
evolutionary method with fuzzy logic for combining
particle swarm optimization and genetic algorithms.
Applied Soft Computing. 11, 2625-2632.
Vaščák, J., Paľa, M., 2012. Adaptation of fuzzy cognitive
maps for navigation purposes by migration algorithms.
International Journal of Artificial Intelligence. 8, 20-
37.
Zhang, N., Zhang, X., Liu, H., Zhang, D., 2014.
Optimization scheme of forming linear WSN for
safety monitoring in railway transportation.
International Journal of Computers Communications
& Control
. 9, 800-810.
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
14
