
Bayesian Quadrature in Nonlinear Filtering
Jakub Prüher and Miroslav Šimandl
European Centre of Excellence - New Technologies for the Information Society,
Faculty of Applied Sciences, University of West Bohemia, Univerzitní 18, Pilsen, Czech Republic
Keywords:
Nonlinear Filtering, Bayesian Quadrature, Gaussian Process.
Abstract:
The paper deals with the state estimation of nonlinear stochastic discrete-time systems by means of quadrature-
based filtering algorithms. The algorithms use quadrature to approximate the moments given by integrals. The
aim is at evaluation of the integral by Bayesian quadrature. The Bayesian quadrature perceives the integral
itself as a random variable, on which inference is to be performed by conditioning on the function evaluations.
Advantage of this approach is that in addition to the value of the integral, the variance of the integral is
also obtained. In this paper, we improve estimation of covariances in quadrature-based filtering algorithms
by taking into account the integral variance. The proposed modifications are applied to the Gauss-Hermite
Kalman filter and the unscented Kalman filter algorithms. Finally, the performance of the modified filters is
compared with the unmodified versions in numerical simulations. The modified versions of the filters exhibit
significantly improved estimate credibility and a comparable root-mean-square error.
1 INTRODUCTION
Dynamic systems are widely used to model behaviour
of real processes throughout the sciences. In many
cases, it is useful to define a state of the system
and consequently work with a state-space represen-
tation of the dynamics. When the dynamics exhibits
stochasticity or can only be observed indirectly, the
problem of state estimation becomes relevant. Es-
timating a state of the dynamic system from noisy
measurements is a prevalent problem in many appli-
cation areas such as aircraft guidance, GPS navigation
(Grewal et al., 2007), weather forecast (Gillijns et al.,
2006), telecommunications (Jiang et al., 2003) and
time series analysis (Bhar, 2010). When the state es-
timator is required to produce an estimate using only
the present and past measurements, this is known as
the filtering problem.
For a discrete-time linear Gaussian systems, the
best estimator in the mean-square-error sense is the
much-celebrated Kalman filter (KF) (Kalman, 1960).
First attempts to deal with the estimation of nonlinear
dynamics can be traced to the work of (Smith et al.,
1962), which resulted in the extended Kalman filter
(EKF). The EKF algorithm uses the Taylor series ex-
pansion to approximate the nonlinearities in the sys-
tem description. A disadvantage of the Taylor series
is that it requires differentiability of the approximated
functions. This prompted further development (Nør-
gaard et al., 2000; Šimandl and Duník, 2009) result-
ing in the derivative-free filters based on the Stirling’s
interpolation formula. Other approaches that approx-
imate nonlinearities include the Fourier-Hermite KF
(Sarmavuori and Särkkä, 2012), special case of which
is the statistically linearized filter (Maybeck, 1982;
Gelb, 1974).
Instead of explicitly dealing with nonlinearities
in the system description, the unscented Kalman fil-
ter (UKF) (Julier et al., 2000) describes the densities
by a finite set of deterministically chosen σ-points,
which are then propagated through the nonlinearity.
Other filters, such as the Gauss-Hermite Kalman filter
(GHKF) (Ito and Xiong, 2000), the cubature Kalman
filter (CKF) (Arasaratnam and Haykin, 2009) and the
stochastic integration filter (Duník et al., 2013), uti-
lize numerical quadrature rules to approximate mo-
ments of the relevant densities. These filters can
be seen as representatives of a more general σ-point
methodology.
A limitation of classical integral approximations,
such as the Gauss-Hermite quadrature (GHQ), is that
they are specifically designed to perform with zero
error on a narrow class of functions (typically poly-
nomials up to a given degree (Särkkä, 2013)). It is
also possible to design rules, that have best average-
case performance on a wider range of functions at
the cost of permitting small non-zero error (Minka,
2000). In recent years, the Bayesian quadrature (BQ)
380
Prüher J. and Šimandl M..
Bayesian Quadrature in Nonlinear Filtering.
DOI: 10.5220/0005534003800387
In Proceedings of the 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2015), pages 380-387
ISBN: 978-989-758-122-9
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

has become a focus of interest in probabilistic numer-
ics community (Osborne et al., 2012). The BQ treats
numerical integration as a problem of Bayesian infer-
ence and thus it is able to provide an additional in-
formation - namely, uncertainty in the computation of
the integral itself. In (Särkkä et al., 2014), the authors
work with the concept of BQ, but the algorithms de-
rived therein do not make use of the uncertainty in the
integral computations.
The goal of this paper is to augment the current
σ-point algorithms so that the uncertainty associated
with the integral approximations is also reflected in
their estimates.
The rest of the paper is organized as follows. For-
mal definition of the Gaussian filtering problem is
outlined in Section 2, followed by the exposition of
the basic idea of Bayesian quadrature in Section 3.
The main contribution, which is the design of the
Bayes-Hermite Kalman filter (BHKF), is presented in
Section 4. Finally, comparison of the BHKF with ex-
isting filters is made in Section 5.
2 PROBLEM FORMULATION
The discrete-time stochastic dynamic system is de-
scribed by the following state-space model
x
k
= f(x
k−1
) + q
k−1
, q
k−1
∼ N(0, Q), (1)
z
k
= h(x
k
) + r
k
, r
k
∼ N(0, R), (2)
with initial conditions x
0
∼ N(m
0
, P
0
), where x
k
∈ R
n
is the system state evolving according to the known
nonlinear dynamics f : R
n
→ R
n
perturbed by the
white state noise w
k−1
∈ R
n
. Measurement z
k
∈ R
p
is
a result of applying known nonlinear transformation
h : R
n
→ R
p
to the system state and white addi-
tive measurement noise r
k
∈ R
p
. The mutual inde-
pendence is assumed between the state noise w
k
, the
measurement noise r
k
and the system initial condition
x
0
for all k ≥ 1.
The filtering problem is concerned with determi-
nation of the probability density function p(x
k
| z
1:k
).
The shorthand z
1:k
stands for the sequence of mea-
surements z
1
, z
2
, . . . , z
k
. The general solution to the
filtering problem is given by the Bayesian recursive
relations in the form of density functions
p(x
k
|z
1:k
) =
p(z
k
|x
k
) p(x
k
|z
1:k−1
)
p(z
k
|z
1:k−1
)
, (3)
with predictive density p(x
k
| z
1:k−1
) given by the
Chapman-Kolmogorov equation
p(x
k
|z
1:k−1
) =
Z
p(x
k
|x
k−1
)p(x
k−1
|z
1:k−1
) dx
k−1
.
(4)
In this paper, the integral computation is assumed
to take place over the support of x
k−1
. The like-
lihood term p(z
k
| x
k
) in (3) is determined by the
measurement model (2) and the transition probability
p(x
k
|x
k−1
) in (4) by the dynamics model (1).
For tractability reasons, the Gaussian filters make
simplifying assumption, that the joint density of state
and measurement p(x
k
, z
k
| z
1:k−1
) is of the form
N
x
k|k−1
z
k|k−1
m
x
k|k−1
m
z
k|k−1
,
P
x
k|k−1
P
xz
k|k−1
P
zx
k|k−1
P
z
k|k−1
. (5)
Knowledge of the moments in (5) is fully sufficient
(Deisenroth and Ohlsson, 2011) to express the first
two moments, m
x
k|k
and P
x
k|k
, of the conditional density
p(x
k
| z
1:k
) using the conditioning formula for Gaus-
sians as
m
x
k|k
= m
x
k|k−1
+ K
k
z
k
− m
z
k|k−1
, (6)
P
x
k|k
= P
x
k|k−1
− K
k
P
z
k|k−1
K
>
k
, (7)
with the Kalman gain defined as
K
k
= P
xz
k|k−1
P
z
k|k−1
−1
.
The problem of computing the moments in (5) can
be seen, on a general level, as a computation of mo-
ments of a transformed random variable
y = g(x), (8)
where g is a nonlinear vector function. This invari-
ably entails evaluation of the integrals of the follow-
ing kind
E[y] =
Z
g(x)p(x) dx (9)
with Gaussian p(x). Since the integral is typically in-
tractable, σ-point algorithms resort to the approxima-
tions based on weighted sum of function evaluations
Z
g(x)p(x) dx ≈
N
X
i=1
w
i
g(x
(i)
). (10)
The evaluation points x
(i)
are also known as the σ-
points, hence the name.
Thus, for instance, to compute m
x
k|k−1
, P
x
k|k−1
and
P
xz
k|k−1
, the following expressions, given in the matrix
notation, are used
m
x
k|k−1
' F
>
w, (11)
P
x
k|k−1
'
˜
F
>
W
˜
F, (12)
P
xz
k|k−1
'
˜
X
>
W
˜
F, (13)
where the weights are now w =
[
w
1
, . . . , w
N
]
>
,
W = diag
(
[w
1
, . . . , w
N
]
)
and the i-th rows of F,
˜
F and
˜
X are defined as the transpose of f(x
(i)
k−1
),
f(x
(i)
k−1
) − m
x
k|k−1
and x
(i)
k−1
− m
x
k|k−1
respectively.
BayesianQuadratureinNonlinearFiltering
381

All the information a quadrature rule has about
the function behaviour is conveyed by the N func-
tion values g(x
(i)
). Conversely, this means that any
quadrature is uncertain about the true function values
in between the σ-points. The importance of quantify-
ing this uncertainty becomes particularly pronounced,
when the function is not integrated exactly due to the
inherent design limitations of the quadrature (such as
the choice of weights and σ-points). All σ-point fil-
ters thus operate with the uncertainty, which is not
accounted for in their estimates. The classical treat-
ment of the quadrature does not lend itself nicely to
the quantification of the uncertainty associated with a
given rule. On the other hand, the Bayesian quadra-
ture, which treats the integral approximation as a
problem in Bayesian inference, is perfectly suited for
this task.
The Idea of using Bayesian quadrature in the state
estimation algorithms was already treated in (Särkkä
et al., 2014). The derived filters and smoothers, how-
ever, do not fully utilize the potential of the Bayesian
quadrature. Namely, variance of the integral is not re-
flected in their estimates, which still remains a prob-
lem to this day.
3 GAUSSIAN PROCESS PRIORS
AND BAYESIAN QUADRATURE
In this section, we introduce the key concepts of
Gaussian process priors and Bayesian quadrature,
which are crucial to the derivation of the filtering al-
gorithm in Section 4.
3.1 Gaussian Process Priors
Uncertainty over functions is naturally expressed by
a stochastic process. In Bayesian quadrature, Gaus-
sian processes (GP) are used for their favourable an-
alytical properties. Gaussian process is a collection
of random variables indexed by elements of an index
set, any finite number of which has a joint Gaussian
density (Rasmussen and Williams, 2006). That is, for
any finite set of indices X
0
=
n
x
0
1
, x
0
2
, . . . , x
0
m
o
, it holds
that
( g(x
0
1
), g(x
0
2
), . . . , g(x
0
m
) )
>
∼ N(0, K), (14)
where the kernel (covariance) matrix K is made up
of pair-wise evaluations of the kernel function, thus
[
K
]
i j
= k(x
i
, x
j
). Choosing a kernel, which in prin-
ciple can be any symmetric positive definite function
of two arguments, introduces assumptions about the
underlying function we are trying to model. Bayesian
inference allows to combine the GP prior p(g) with
the data, D =
{
(
x
i
, g(x
i
)
)
, i = 1, . . . , N
}
comprising
the evaluation points X = [x
1
, . . . , x
N
] and the func-
tion evaluations y
g
=
g(x
1
), . . . , g(x
N
)
>
, to pro-
duce a GP posterior p(g | D) with moments given by
(Rasmussen and Williams, 2006)
E
g
[g(x
0
)] = m
g
(x
0
) = k
>
(x
0
)K
−1
y
g
, (15)
V
g
[g(x
0
)] = σ
2
g
(x
0
) = k(x
0
, x
0
) − k
>
(x
0
)K
−1
k(x
0
),
(16)
where k(x
0
) = [k(x
0
, x
1
), . . . , k(x
0
, x
N
)]
>
. Thus, for
any test input x
0
, we recover a Gaussian posterior pre-
dictive density over the function values g(x
0
). Fig-
ure 1 depicts predictive moments of the GP poste-
rior density. Notice, that in between the evaluations,
where the true function value is not known, the GP
model is uncertain.
x
0
g(x
0
)
g(x
0
)
g(x
i
)
m
g
(x
0
)
Figure 1: True function (dashed), GP posterior mean
(solid), observed function values (dots) and GP posterior
samples (grey). The shaded area represents GP posterior
predictive uncertainty (±2 σ
g
(x
0
)). Notice the collapse of
uncertainty around the observations.
3.2 Bayesian Quadrature
The problem of numerical quadrature pertains to the
approximate computation of the integral
E
x
[g(x)] =
Z
g(x)p(x) dx. (17)
The key distinguishing feature of the BQ is that it
"treats the problem of numerical integration as the
one of statistical inference." (O’Hagan, 1991) This is
achieved by placing a prior density over the integrated
functions themselves. Consequence of this is that the
integral itself is then a random variable as well. Con-
cretely, if GP prior density is used, then the value of
the integral of the function will also be Gaussian dis-
tributed. This follows from the fact that integral is a
linear operator acting on the GP distributed random
function g(x).
Following the line of thought of (Rasmussen and
Ghahramani, 2003) we take expectation (with respect
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
382

to p(g |D)) of the integral (17) and obtain
E
g|D
[E
x
[g(x)]] =
ZZ
g(x)p(x) dx p(g|D) dg
ZZ
g(x)p(g |D) dgp(x) dx = E
x
[E
g|D
[g(x)]]. (18)
From (18) we see, that taking the expectation of in-
tegral is the same as integrating the GP posterior
mean function, which effectively approximates the in-
tegrated function g(x). Variance of the integral is
V
g|D
[E
x
[g(x)]] =
ZZ
k(x, x
0
)p(x)p(x
0
) dx dx
0
. (19)
A popular choice of kernel function, that enables the
expressions (18) and (19) to be computed analytically
is an Exponentiated Quadratic (EQ)
k(x
i
, x
j
; θ) = α
2
exp
−
1
2
x
i
− x
j
>
Λ
−1
x
i
− x
j
!
,
(20)
where the vertical lengthscale α and the horizontal
lengthscales on diagonal of Λ = diag( [`
2
1
, . . . , `
2
n
] )
are kernel hyper-parameters, collectively denoted by
the symbol θ. By using this particular kernel the as-
sumption of smoothness (infinite differentiability) of
the integrand is introduced (Rasmussen and Williams,
2006). Given the kernel function in the form (20) and
p(x) = N(m, P), the expressions for the integral pos-
terior mean and variance reduce to
E
g|D
[E
x
[g(x)]] = l
>
K
−1
y
g
, (21)
V
g|D
[E
x
[g(x)]] = α
2
2Λ
−1
P + I
−1/2
− l
>
K
−1
l, (22)
with l = [l
1
, . . . , l
N
]
>
l
i
=
Z
k(x, x
i
) N(x | m, P) dx = α
2
Λ
−1
P + I
−1/2
× exp
−
1
2
(x
i
− m)
>
(Λ + P)
−1
(x
i
− m)
!
. (23)
Notice that we could define weights as w = l
>
K
−1
.
Then the expression (21) is just a weighted sum of
function evaluations, conforming to the general σ-
point method as described by (11). As opposed to
classical quadrature rules, that prescribe the precise
locations of σ-points, BQ makes no such restrictions.
In (Minka, 2000), the optimal placement is deter-
mined by minimizing the posterior variance of the in-
tegral (19).
In the next section, we show how the integral vari-
ance (19) can be reflected in the current nonlinear fil-
tering quadrature-based algorithms.
4 BAYES-HERMITE KALMAN
FILTER
In this section, we show how the integral variance
can be incorporated into the moment estimates of
the transformed random variable. Parallels are drawn
with existing GP-based filters and the Bayes-Hermite
Kalman filter algorithm is outlined.
4.1 Incorporating Integral Uncertainty
Uncertainty over the function values is introduced by
a GP posterior p(g | D), whose mean function (15)
acts effectively as an approximation to the determin-
istic function g. Note that the equations (15), (16) can
only be used to model single output dimension of the
vector function g. For now, we will assume a scalar
function g unless otherwise stated. To keep the nota-
tion uncluttered, conditioning on D will be omitted.
Treating the function values g(x) as random leads to
the joint density p(g, x) and thus, when computing the
moments of g(x), the expectations need to be taken
with respect to both variables. This results in the fol-
lowing approximation of the true moments
µ = E
x
[g(x)] ≈ E
g,x
[g(x)], (24)
σ
2
= V
x
[g(x)] ≈ V
g,x
[g(x)]. (25)
Using the law of iterated expectations, we get
E
g,x
[g(x)] = E
g
[E
x
[g(x)]] = E
x
[E
g
[g(x)]]. (26)
This fact was used to derive weights for the filtering
and smoothing algorithms in (Särkkä et al., 2014),
where the same weights were used in computations
of means and covariances. Our proposed approach,
however, proceeds differently in derivation of weights
used in the computation of covariance matrices.
Note that the term for variance can be written out
using the decomposition formula either as
V
g,x
[g(x)] = E
x
[V
g
[g(x)]] + V
x
[E
g
[g(x)]] (27)
or as
V
g,x
[g(x)] = E
g
[V
x
[g(x)]] + V
g
[E
x
[g(x)]] (28)
depending on which factorization of the joint density
p(g, x) is used. The terms V
g
[g(x)] and V
g
[E
x
[g(x)]]
can be identified as variance of the integrand and vari-
ance of the integral respectively. In case of determin-
istic g, both of these terms are zero.
With EQ covariance (20), the expression (26) for
the first moment of a transformed random variable
takes on the form (21). Since the variance decom-
positions in (27) and (28) are equivalent, both can be
used to achieve the same goal.
BayesianQuadratureinNonlinearFiltering
383

The form (27) was utilized in derivation of the
Gaussian process - assumed density filter (GP-ADF)
(Deisenroth et al., 2012), which relies on the solution
to the problem of prediction with GPs at uncertain in-
puts (Girard et al., 2003). So, even though these re-
sults were derived to solve a seemingly different prob-
lem, we point out, that by using the form (27), the
uncertainty of the integral (as seen in the last term
of (28)) is implicitly reflected in the resulting covari-
ance. To conserve space, we only provide a summary
of the results in (Deisenroth et al., 2009) and point
reader to the said reference for detailed derivations.
The expressions for the moments of transformed vari-
able were rewritten into a form, which assumes that a
single GP is used to model all the output dimensions
of the vector function (8)
µ = G
>
w, (29)
Σ = G
>
WG − µµ
>
+ diag
α
2
− tr
K
−1
L
, (30)
with matrix G being defined analogously to F in (11)-
(13). The weights are given as
w = K
−1
l and W = K
−1
LK
−1
, (31)
where
L =
Z
k(X, x; θ
g
) k(x, X; θ
g
) N(x|m, P) dx. (32)
The equations (29) and (30) bear certain resemblance
to the σ-point method in (11), (12); however, in this
case matrix W is not diagonal. Note, that the weights
depend on the current location of σ-points and need
to be recomputed at every time step.
4.2 BHKF Algorithm
The filtering algorithm based on the BQ can now be
constructed utilizing (29) and (30). The BHKF uses
two GPs with the EQ covariance - one for each func-
tion in the state-space model (1)-(2), which means
that the two sets of hyper-parameters are used; θ
f
and
θ
h
. In the algorithm specification below, the lower in-
dex of q and K specifies the set of hyper-parameters
used to construct these quantities.
Algorithm (Bayes-Hermite Kalman Filter). In the
following, let x
0|0
∼ N
m
0|0
, P
0|0
, i = 1, . . . , N and
k = 1, 2, . . ..
Initialization:
Choose unit σ-points ξ
(i)
. Set hyper-parameters θ
f
and θ
h
. Proceed from the initial conditions x
0|0
, for
all k, by alternating between the following prediction
and filtering steps.
Prediction:
1. Form the σ-points x
(i)
k−1
= m
x
k−1|k−1
+
q
P
x
k−1|k−1
ξ
(i)
.
2. Propagate σ-points through the dynamics model
x
(i)
k
= f
x
(i)
k−1
and form F as in (11)-(13).
3. Using x
(i)
k
and hyper-parameters θ
f
, compute
weights w
x
and W
x
according to (31) and (32).
4. Compute predictive mean m
x
k|k−1
and predictive
covariance P
x
k|k−1
m
x
k|k−1
= F
>
w
x
P
x
k|k−1
= F
>
W
x
F − m
x
k|k−1
(m
x
k|k−1
)
>
+ diag
α
2
− tr
K
−1
L
+ Q
Filtering:
1. Form the σ-points x
(i)
k
= m
x
k|k−1
+
q
P
x
k|k−1
ξ
(i)
.
2. Propagate the σ-points through the measurement
model z
(i)
k
= h
x
(i)
k
, and form H as in (11)-(13)
3. Using x
(i)
k
and hyper-parameters θ
h
, compute
weights w
z
and W
z
according to (31) and (32).
Construct W
xz
= diag
(
l
h
)
K
−1
h
.
4. Compute measurement mean, covariance and
state-measurement cross-covariance
m
z
k|k−1
= H
>
w
z
P
z
k|k−1
= H
>
W
z
H − m
z
k|k
(m
z
k|k
)
>
,
+ diag
α
2
− tr
K
−1
L
+ R
P
xz
k|k−1
= P
x
k|k−1
(P
x
k|k−1
+ Λ)
−1
˜
XW
xz
H,
where the i-th row of
˜
X is x
(i)
k
− m
x
k|k−1
5. Compute the filtered mean m
x
k|k
and filtered co-
variance P
x
k|k
m
x
k|k
= m
x
k|k−1
+ K
k
z
k
− m
z
k|k−1
,
P
x
k|k
= P
x
k|k−1
− K
k
P
z
k|k−1
K
>
k
.
with Kalman gain K
k
= P
xz
k|k−1
P
z
k|k−1
−1
.
5 NUMERICAL ILLUSTRATION
In the numerical simulations the performance of
the filters was tested on a univariate non-stationary
growth model (UNGM) (Gordon et al., 1993)
x
k
=
1
2
x
k−1
+
25x
k−1
1 + x
2
k−1
+ 8 cos(1.2 k) + q
k−1
,
(33)
z
k
=
1
20
x
2
k−1
+ r
k
, (34)
with the state noise q
k−1
∼ N(0, 10), measurement
noise r
k
∼ N(0, 1) and initial conditions x
0|0
∼
N(0, 5).
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
384
Since the BHKF does not prescribe the σ-point lo-
cations, they can be chosen at will. The GHKF based
on the r-th order Gauss-Hermite (GH) quadrature rule
uses σ-points, which are determined as the roots of
the r-th degree univariate Hermite polynomial H
r
(x).
When it is required to integrate function of a vector
argument (n > 1), a multidimensional grid of points
is formed by the Cartesian product, leading to their
exponential growth (N = r
n
). The GH weights are
computed according to (Särkkä, 2013) as
w
i
=
r!
[rH
r−1
(x
(i)
)]
2
. (35)
The Unscented Transform (UT) is also a simple
quadrature rule (Ito and Xiong, 2000), that uses N =
2n + 1 deterministically chosen σ-points,
x
(i)
= m +
√
Pξ
(i)
(36)
with unit σ-points defined as columns of the matrix
h
ξ
(0)
, ξ
(1)
, . . . , ξ
(2n+1)
i
=
h
0, cI
n
, −cI
n
i
(37)
where I
n
denotes n × n identity matrix. The corre-
sponding weights are defined by
w
0
=
κ
n + κ
, w
i
=
1
2(n + κ)
, i = 1, . . . , 2n (38)
with scaling factor c =
√
n + κ. All of the BHKFs
used the same set of hyper-parameters θ
f
= θ
h
=
[`, α]
>
= [3, 1]
>
. UKF operated with κ = 2. BHKFs
that used UT and GH σ-points of order 5, 7, and 10
were compared with their classical quadrature-based
counterparts, namely, UKF and GHKF of order 5, 7
and 10.
We performed 100 simulations, each for K = 500
time steps. Root-mean-square error (RMSE)
RMSE =
v
u
t
1
K
K
X
k=1
x
k
− m
x
k|k
2
(39)
was used to measure the overall error in the state esti-
mate m
x
k|k
across all time steps. As a metric that takes
into account the estimated state covariance, the Non-
credibility Index (NCI) (Li and Zhao, 2006) given by
NCI =
10
K
K
X
k=1
log
10
x
k
− m
x
k|k
>
P
−1
k|k
x
k
− m
x
k|k
x
k
− m
x
k|k
>
Σ
−1
k
x
k
− m
x
k|k
(40)
was used, where Σ
k
is the mean-square-error matrix.
The filter is said to be optimistic if it underestimates
the actual error, which is indicated by NCI > 0. Per-
fectly credible filter would provide NCI = 0, that is,
it would neither overestimate nor underestimate the
actual error.
Table 1: The average root-mean-square error.
BQ Classical
UT 10.544 ± 0.048 11.081 ± 0.159
GH5 10.740 ± 0.070 10.257 ± 0.133
GH7 10.306 ± 0.053 9.855 ± 0.133
GH10 10.431 ± 0.058 9.705 ± 0.120
Tables show average values of the performance
metrics across simulations with estimates of ±2 stan-
dard deviations (obtained by bootstrapping (Wasser-
man, 2006)). As evidenced by the results in Table 1,
the BQ provides superior RMSE performance only
for the case of UT σ-points. In the classical quadra-
ture case the performance improves with increasing
number of σ-points used. This trend is not observed
in the BQ case. We suspect that this is due to the
hyper-parameters θ
f
, θ
h
being fixed to the same value
regardless of the number of σ-points. These act ef-
fectively as a training set of the GP model and thus,
it would make sense to use different values of hyper-
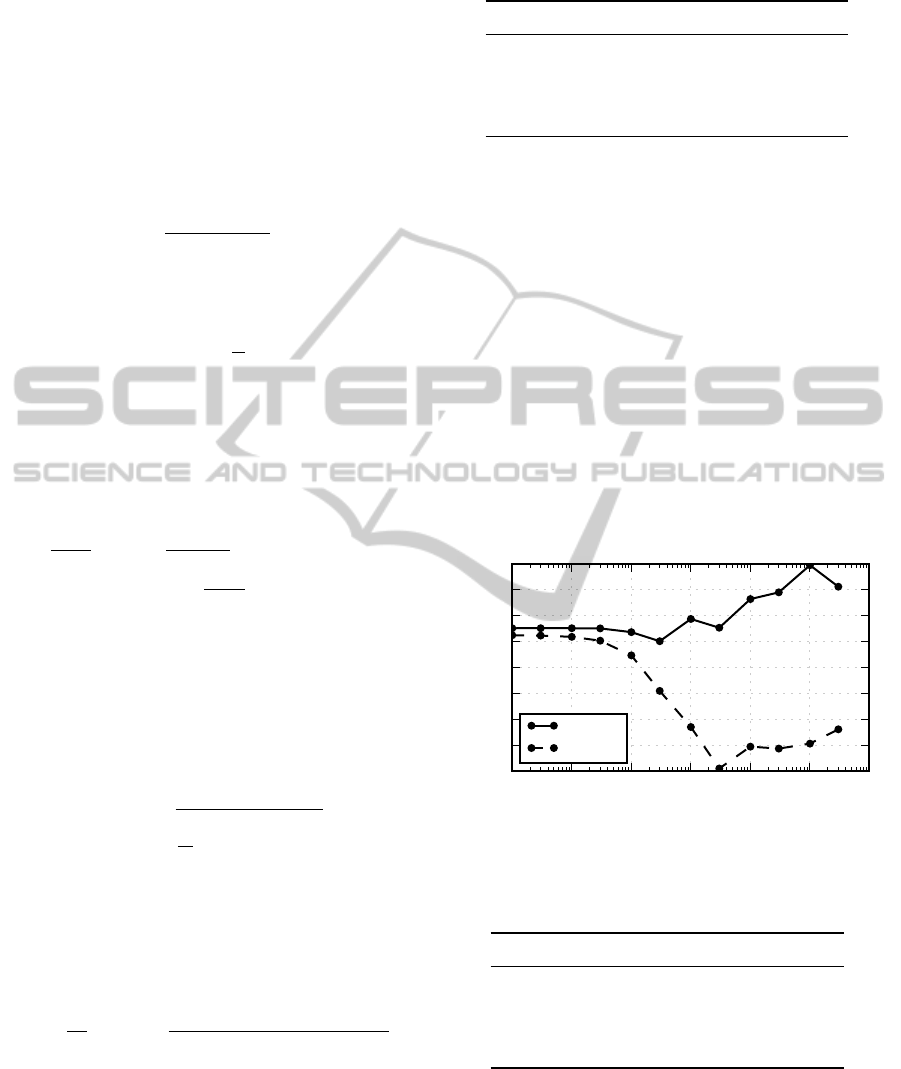
parameters with training sets of different sizes. Fig-
ure 2 illustrates the effect of changing lengthscale
on the overall performance of the BHKF with UT σ-
points. The self-assessment of the filter performance
10
−3
10
−2
10
−1
10
0
10
1
10
2
10
3
`
5
6
7
8
9
10
11
12
13
RMSE, NCI
RMSE
NCI
Figure 2: Sensitivity of BHKF performance to changes in
the lengthscale hyperparameter `. The choice ` = 3 mini-
mizes NCI at the cost of slightly higher RMSE.
Table 2: The average non-credibility index.
BQ Classical
UT 5.106 ± 0.010 12.071 ± 0.045
GH5 4.977 ± 0.013 10.228 ± 0.065
GH7 4.321 ± 0.009 9.256 ± 0.070
GH10 3.647 ± 0.010 8.042 ± 0.077
is less optimistic in the case of BQ, as indicated by
the lower NCI in the Table 2. This indicates that the
BQ based filters are more conservative in their covari-
ance estimates. This is a consequence of including
additional uncertainty (integral variance), which the
classical quadrature-based filters do not utilize.
BayesianQuadratureinNonlinearFiltering
385

6 CONCLUSIONS
In this paper, we proposed a way of utilizing uncer-
tainty associated with integral approximations in the
nonlinear quadrature-based filtering algorithms. This
was enabled by the Bayesian treatment of quadrature.
The proposed filtering algorithms were tested on a
univariate benchmarking example. The results show
that the filters utilizing additional uncertainty pro-
vided by the BQ show significant improvement in
terms of credibility of their estimates.
Proper setting of the hyper-parameters is crucially
important for achieving competitive results. The need
for a principled approach for dealing with the hyper-
parameters could prompt further research. Another
possible research direction could be concerned with
the adaptive placement of σ-points based on the pos-
terior integral variance.
ACKNOWLEDGEMENTS
This work was supported by the Czech Science Foun-
dation, project no. GACR P103-13-07058J.
REFERENCES
Arasaratnam, I. and Haykin, S. (2009). Cubature Kalman
Filters. IEEE Transactions on Automatic Control,
54(6):1254–1269.
Bhar, R. (2010). Stochastic filtering with applications in
finance. World Scientific.
Deisenroth, M. P., Huber, M. F., and Hanebeck, U. D.
(2009). Analytic moment-based Gaussian process fil-
tering. In Proceedings of the 26th Annual Interna-
tional Conference on Machine Learning - ICML ’09,
pages 1–8. ACM Press.
Deisenroth, M. P. and Ohlsson, H. (2011). A General Per-
spective on Gaussian Filtering and Smoothing: Ex-
plaining Current and Deriving New Algorithms. In
American Control Conference (ACC), 2011, pages
1807–1812. IEEE.
Deisenroth, M. P., Turner, R. D., Huber, M. F., Hanebeck,
U. D., and Rasmussen, C. E. (2012). Robust Filtering
and Smoothing with Gaussian Processes. IEEE Trans-
actions on Automatic Control, 57(7):1865–1871.
Duník, J., Straka, O., and Šimandl, M. (2013). Stochastic
Integration Filter. IEEE Transactions on Automatic
Control, 58(6):1561–1566.
Gelb, A. (1974). Applied Optimal Estimation. The MIT
Press.
Gillijns, S., Mendoza, O., Chandrasekar, J., De Moor, B.,
Bernstein, D., and Ridley, A. (2006). What is the en-
semble kalman filter and how well does it work? In
American Control Conference, 2006, page 6.
Girard, A., Rasmussen, C. E., Quiñonero Candela, J., and
Murray-Smith, R. (2003). Gaussian Process Priors
With Uncertain Inputs Application to Multiple-Step
Ahead Time Series Forecasting. In Becker, S., Thrun,
S., and Obermayer, K., editors, Advances in Neural
Information Processing Systems 15, pages 545–552.
MIT Press.
Gordon, N. J., Salmond, D. J., and Smith, A. F. M. (1993).
Novel approach to nonlinear/non-Gaussian Bayesian
state estimation. IEE Proceedings F (Radar and Sig-
nal Processing), 140(2):107–113.
Grewal, M. S., Weill, L. R., and Andrews, A. P. (2007).
Global Positioning Systems, Inertial Navigation, and
Integration. Wiley.
Ito, K. and Xiong, K. (2000). Gaussian Filters for Nonlinear
Filtering Problems. IEEE Transactions on Automatic
Control, 45(5):910–927.
Jiang, T., Sidiropoulos, N., and Giannakis, G. (2003).
Kalman filtering for power estimation in mobile com-
munications. Wireless Communications, IEEE Trans-
actions on, 2(1):151–161.
Julier, S. J., Uhlmann, J. K., and Durrant-Whyte, H. F.
(2000). A New Method for the Nonlinear Transfor-
mation of Means and Covariances in Filters and Es-
timators. IEEE Transactions on Automatic Control,
45(3):477–482.
Kalman, R. E. (1960). A New Approach to Linear Filtering
and Prediction Problems. Journal of Basic Engineer-
ing, 82(1):35–45.
Li, X. R. and Zhao, Z. (2006). Measuring Estimator’s Cred-
ibility: Noncredibility Index. In Information Fusion,
2006 9th International Conference on, pages 1–8.
Maybeck, P. S. (1982). Stochastic Models, Estimation and
Control: Volume 2. Academic Press.
Minka, T. P. (2000). Deriving Quadrature Rules from Gaus-
sian Processes. Technical report, Statistics Depart-
ment, Carnegie Mellon University, Tech. Rep.
Nørgaard, M., Poulsen, N. K., and Ravn, O. (2000). New
developments in state estimation for nonlinear sys-
tems. Automatica, 36:1627–1638.
O’Hagan, A. (1991). Bayes–Hermite quadrature. Journal
of Statistical Planning and Inference, 29(3):245–260.
Osborne, M. A., Rasmussen, C. E., Duvenaud, D. K., Gar-
nett, R., and Roberts, S. J. (2012). Active Learning
of Model Evidence Using Bayesian Quadrature. In
Advances in Neural Information Processing Systems
(NIPS), pages 46–54.
Rasmussen, C. E. and Ghahramani, Z. (2003). Bayesian
monte carlo. In S. Becker, S. T. and Obermayer, K.,
editors, Advances in Neural Information Processing
Systems 15, pages 489–496. MIT Press, Cambridge,
MA.
Rasmussen, C. E. and Williams, C. K. (2006). Gaussian
Processes for Machine Learning. The MIT Press.
Särkkä, S. (2013). Bayesian Filtering and Smoothing. Cam-
bridge University Press, New York.
Särkkä, S., Hartikainen, J., Svensson, L., and Sandblom,
F. (2014). Gaussian Process Quadratures in Nonlin-
ear Sigma-Point Filtering and Smoothing. In Informa-
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
386

tion Fusion (FUSION), 2014 17th International Con-
ference on, pages 1–8.
Sarmavuori, J. and Särkkä, S. (2012). Fourier-Hermite
Kalman Filter. IEEE Transactions on Automatic Con-
trol, 57(6):1511–1515.
Šimandl, M. and Duník, J. (2009). Derivative-free estima-
tion methods: New results and performance analysis.
Automatica, 45(7):1749–1757.
Smith, G. L., Schmidt, S. F., and McGee, L. A. (1962). Ap-
plication of statistical filter theory to the optimal esti-
mation of position and velocity on board a circumlu-
nar vehicle. Technical report, NASA Tech. Rep.
Wasserman, L. (2006). All of Nonparametric Statistics.
Springer-Verlag New York.
BayesianQuadratureinNonlinearFiltering
387
