
A Model-Driven Engineering Process for Agent-based
Traffic Simulations
Alberto Fernández-Isabel and Rubén Fuentes-Fernández
Research Group on Agent-based Social & Interdisciplinary Applications, Complutense University of Madrid, Madrid, Spain
Keywords: Traffic, Simulation, Agent-based Modelling, Model-Driven Engineering, Modelling Language, Metamodel,
Code Generation.
Abstract: Traffic has an important impact in many aspects of our everyday life, from healthcare to transport regulation
or urban planning. Given its complexity, the study in real settings is frequently limited, so researchers resort
to simulations. However, realistic simulations are still complex systems. Its development frequently requires
multidisciplinary groups, where misunderstandings are frequent, and there is a great variety of potential
theories and platforms to consider. In order to reduce the impact of these issues, the Model-Driven
Engineering (MDE) of simulations has been proposed. It is focused on developing mainly through models
and their semi-automated transformation. Nevertheless, an effective approach of this kind requires the
availability of infrastructures that include modelling languages, transformations, tools, and processes to use
them. This work presents a MDE process for traffic simulations. It introduces a modelling language and
makes uses of available infrastructures in its tasks. The process guides users in creating tailored models for
their simulations, and transforming these to code. A case study that uses an existing model for drivers’
behaviour and an already available platform to develop a simulation illustrates the approach.
1 INTRODUCTION
Road traffic is a complex phenomenon present in
our everyday lives. Its analysis is relevant in studies
of aspects as different as healthcare, road safety,
transport regulation, fuel taxes, insurances, or urban
planning (Elvik et al., 2009; Ward, 2004). Multiple
factors make studying traffic on its actual settings
hard and costly, for instance (Pursula, 1999): the
involvement of living beings; the size of the areas to
consider; the heterogeneity and number of elements
participating in it; and the need of monitoring
infrastructures. This situation has led researchers to
make an extensive use of simulations to study it.
The simulation of complex systems presents its
own challenges (Galán et al., 2009). It frequently
requires integrating multiple theories, needed to deal
with the different facets in the study and types of
participants in the phenomenon. This demands
multidisciplinary teams, where experts have
different backgrounds. This heterogeneity produces
misunderstandings, which in turn make difficult to
guarantee the right alignment between theories, the
setting of the study, and the final simulation, and to
validate the results (Axtell & Epstein, 1994).
In order to address these issues, researchers have
proposed using Model-Driven Engineering (MDE)
to develop simulations (Fuentes-Fernández et al.,
2012). MDE (France & Rumpe, 2007) is a paradigm
for software development focused on models. These
gather most of the required information (e.g.
requirements, design, features of target platforms, or
tests). Models must be compliant with explicitly
defined Modelling Languages (MLs) to enable their
semi-automated processing using transformations.
Transformations are used, for instance, to merge
models and generate code and documentation.
Working with this infrastructure, the development of
simulations becomes an iterative process of adding
and modifying information in models and
transformations. The main advantage is that experts
make explicit all the information required to develop
the simulation, and they can use for it different and
tailored MLs in an integrated way. Moreover, they
can reuse development artefacts more easily than in
traditional approaches, as those are described at a
higher level of abstraction than code.
The work presented in this paper follows this
line. It provides a MDE process and its related
infrastructure to develop traffic simulations.
418
Fernández-Isabel A. and Fuentes-Fernández R..
A Model-Driven Engineering Process for Agent-based Traffic Simulations.
DOI: 10.5220/0005535704180427
In Proceedings of the 5th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH-2015),
pages 418-427
ISBN: 978-989-758-120-5
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

The basis is an extensible Traffic ML (TML),
suitable to integrate new concepts and theories. The
language foundation lies on Agent-Based Modelling
(ABM) (Axtell & Epstein, 1994) and the Driver-
Vehicle Environment (DVE) model (Amditis et al.,
2010). ABM has the agent as its main primitive. An
agent is an entity situated in an environment. There,
it interacts according to its capabilities with other
agents and non-agent objects. The agent has a state
that is frequently modelled in terms of mental
entities, such as information and goals. The DVE
model describes the main categories of elements
participating in traffic (i.e. those in its acronym) and
their structural relationships. It considers that traffic
dynamics and the behaviour of its participants
largely depends on their mutual influences. The
proposed TML integrates these approaches, and adds
extension mechanisms based on inheritance and
composition relationships.
Traffic experts and simulation designers work in
a process with two stages using the TML. The first
one is focused on traffic issues, and is platform-
independent. The second one is intended to develop
the design and code of the simulation, and is
platform-oriented.
Traffic experts start modelling with the TML the
concepts of the specific theories to use in their
simulation. For instance, the TML does not specify
any actual model of decision-making for agents, so it
must be added. If there are models of these theories
available from previous projects, they can reuse
them. Then, experts use these theoretical models to
build the specifications of the simulation that
represents the actual setting to study.
Simulation designers refine the concepts of the
experts’ models to design abstractions. The process
suggests using as the target ML one of an Agent-
Oriented Software Engineering (AOSE)
methodology (Henderson-Sellers & Giorgini, 2005).
In this way, the MLs of both experts and designers
will be already partially aligned thanks to the use of
agent abstractions, even if these do not have exactly
the same semantics. After the mapping, designers
use an existing general MDE methodology to make
the transition to code. Many AOSE methodologies
already apply MDE, so they are a suitable choice.
The infrastructure to work with these elements is
based on several Eclipse projects for MDE (Eclipse,
2015). It includes a model editor for the TML. There
are also transformations for different purposes. For
instance, they implement the mappings between the
traffic and designer MLs, as those of the case study.
The case study considers the reactive model for
drivers’ behaviour described by Ehlert & Rothkrantz
(2001). This model proposes a reasoning cycle for
people, and behaviour rules for different
manoeuvres. The case study specifies it using the
proposed TML, and uses this specification to define
several elements for a simulation. Then, it applies
the INGENIAS AOSE methodology (Pavón,
Gómez-Sanz & Fuentes, 2005) to map the models to
design concepts and generate the simulation code.
The rest of the paper is organised as follows.
Section 2 introduces the main concepts of MDE.
This is the foundation of the approach presented in
Section 3, which includes the TML (see Section 3.1)
and the process that uses it (see Section 3.2). The
case study in Section 4 illustrates the application of
the approach. Section 5 compares this with related
work. Finally, Section 6 discusses the conclusions
and future work.
2 MDE
MDE (France & Rumpe, 2007) is a general approach
to software development organised around models.
Engineers use their models to specify systems at
different abstraction levels (i.e. from the experts’
theories and requirements to the final design) and
from different perspectives (e.g. those of final users,
architecture, performance, or security). From them,
semi-automated transformations generate other
artefacts, e.g. code and tests. In order to make
possible this processing, models must conform to
well-defined MLs. This characteristic requires that
MLs have explicit definitions to validate models
against them.
There are different alternatives to define MLs. In
the case of MDE, most of languages are graphical
and graph-oriented, i.e. they depict graphs of
concepts connected by links and with properties
(Bézivin, 2006). The Unified Modelling Language
(UML) (OMG, 2013) is a typical example of them.
For these MLs, metamodels are the most popular
means to define them.
A metamodel is a model itself that specifies the
primitives and constraints of a ML. Metamodels are
defined with meta-modelling languages, such as the
Meta-Object Facility (MOF) used to specify UML,
or Ecore in Eclipse projects. (Mu et al., 2010). The
meta-modelling primitives of these languages allow
defining types of graphs. For instance, in Ecore, an
instance of EClass is a node, and thus a type of
entity. An EClass instance groups EAttribute (i.e.
properties of primitive EDataTypes) and EReference
(i.e. binary and directed links between two EClass
instances) instances. Besides these, Ecore includes,
AModel-DrivenEngineeringProcessforAgent-basedTrafficSimulations
419

among other concepts, an inheritance relationship
(i.e. ESuperType reference) and the EPackage
concept to group elements.
Regarding transformations, there are also
multiple alternatives. Some works use specific
languages to write them and engines for their
execution. These languages range from completely
procedural to fully declarative. Examples of this
group are the Query-View-Transformation (QVT)
standard of the OMG or the ATLAS Transformation
Language (ATL) (Bézivin, 2006). Other works
propose the use of general-purpose programming
languages to write these transformations. An
example of this case are the modules of the
INGENIAS Development Kit (IDK) (Pavón,
Gómez-Sanz & Fuentes, 2005). The first approach
has the advantage of making clearer the relations
between the source and target elements that
transformations map. The second one makes use of
mainstream expertise and tools, and facilitates fine-
tuning the execution of transformations.
Engineers use the previous infrastructure in
development processes. These are generally iterative
and incremental. In each iteration, engineers refine
their models by adding or modifying some
information, e.g. considering new requirements or
platform specific features. These tasks can involve
introducing manually the new information, or
running transformations to change and create
artefacts. Both models and transformations are
frequently reused from previous projects with
similar needs. Examples of this kind of process are
the Model Driven Architecture (MDA) (Kleppe,
Warmer & Bast, 2003) for object-oriented
developments, or PASSI and INGENIAS
(Henderson-Sellers & Giorgini, 2005) for agent-
oriented ones.
The applicability of these processes largely
depends on the availability of support tools. For this
reason, most of developments adopt Ecore instead of
MOF to work with MLs, as there is an extensive
support in the Eclipse MDE projects for the former.
Researchers frequently extend the basic support
provided by platforms and implement tailored tools
for their processes. This is the case of INGENIAS
with the IDK tool (Pavón, Gómez-Sanz & Fuentes,
2005). The IDK offers its own modelling
environment. It supports defining both MLs and
models compliant with them. It is also able to
integrate modules to carry out transformations. In
the case of model-to-text transformations, the IDK
modules make use of templates. These are XML-like
files with marked elements to indicate where to
inject information from models.
3 DEVELOPMENT OF TRAFFIC
SIMULATIONS
The MDE approach to develop traffic simulations is
based on two main components: the TML to
describe traffic settings (see Section 3.1), and a
process that uses it (see Section 3.2).
3.1 TML
The TML is intended to describe the traffic settings
to study. This requires considering two levels. The
structural one indicates what elements are present
and their features, and the behavioural one how they
change over time. Traffic studies do not agree in
common models for these aspects, given their
variety of needs and theories. The ML acknowledges
this situation and builds a flexible and extensible set
of primitives, able to accommodate different
conceptual frameworks. For this purpose, it adopts
two widely used approaches as its basis, ABM
(Axtell & Epstein, 1994) and the DVE model
(Amditis et al., 2010). It organises their concepts in
conceptual clusters using hierarchy and composition
relationships. Fig. 1 shows the resulting metamodel
described with Ecore (Steinberg et al., 2009).
The metamodel has two root elements. All the
concepts inherit (not shown in Fig. 1) from the
GeneralElement EClass. Instances of this element
can be linked through arbitrary relations, represented
as instances of the GeneralRelationship EClass.
Being both root elements instances of EClass, their
subtypes can have specific attributes. Most of
concepts in the metamodel also have a composes
relationship, which allows arbitrary whole-part
hierarchies of constituents of the proper types.
Conceptually, the metamodel is organised around
three clusters, that correspond to the description of
the features and state of people (i.e. features and
internal state cluster), the environment including the
vehicles (i.e. environment cluster), and the decision-
making of people (i.e. interactions and decisions
cluster). These clusters pursue grouping concepts
strongly connected in the DVE model and having
clearly defined interaction points with other clusters.
The central concept of the TML is the Person. Its
description corresponds to the features and internal
state and the interactions and decisions clusters. It
represents any human participating in traffic, e.g.
drivers and pedestrians from the DVE model. The
Person is an intentional agent, as conceptualised in
many ABM and AOSE (Henderson-Sellers &
Giorgini, 2005) works. This means that it is
modelled as pursuing certain Goals, that it can
SIMULTECH2015-5thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
420
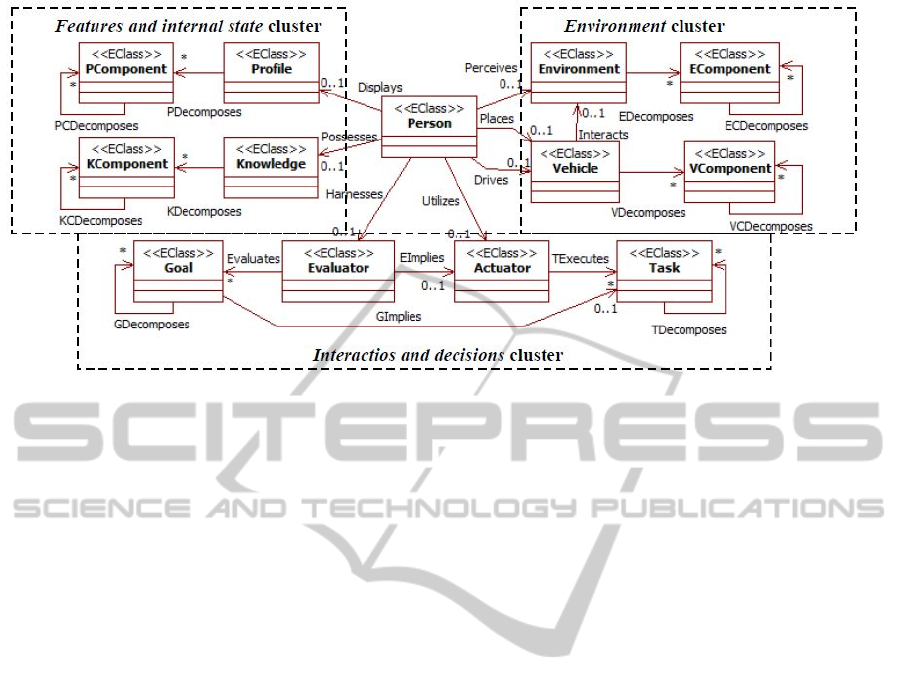
Figure 1: Excerpt of the traffic metamodel. Dotted rectangles indicate the main conceptual clusters. Inverse references are
available for all the depicted associations.
achieve through the execution of the Tasks linked to
them by the GImplies relationship. For instance, a
driver has a goal of driving safely linked to a task of
checking distances with other vehicles. An agent
also has an internal state characterised in terms of its
Profile, which represents its attributes, and
Knowledge, to represent the mental entities it
considers. Examples of parts of the profile are
gender, age, or the type of driving according to past
experiences; parts of knowledge can be information
on driving norms, the streets in a city, or the best
way to overtake another vehicle.
The environment cluster is used to describe the
non-agent elements that can appear in a traffic
setting. They include the Vehicle and Environment
concepts. Person instances can interact with
instances of these concepts. In the case of drivers
and passengers, they perceive information from
Vehicle instances, and the external environment also
through them. They only act on vehicles. Although
all the groups of persons can interact with the
environment, their potential actions differ. For
instance, a driver can brake a vehicle, and a
pedestrian hit its bodywork.
The elements that merge the previous ones
correspond to the perceive-reflect-act cycle of
agents. They are part of the interactions and
decisions cluster. Evaluator instances take as input
information from the other clusters to generate new
one. In particular, they are responsible of stablishing
what goals are not satisfied at a given moment.
Actuator instances execute some of the tasks related
to unfulfilled goals.
Both Evaluator and Actuator instances interact
with instances of other concepts of the metamodel,
e.g. to gather information from Environment
instances or to check Knowledge instances. As these
elements of the interactions and decisions cluster
model parts of a Person, their interactions are
constrained to those instances accessible through
their Person instance. These relationships of
accessibility are represented with the different
structural references from the Person EClass to
others in Fig. 1. For instance, an Evaluator instance
of a given Person instance only knows those
Knowledge instances linked to their person through
instances of the Possesses
EReference.
The previous concepts are the basis to build the
types in the models of specific theories. A
simulation runs instances of these types. The
metamodel includes the GeneralIElement and
GeneralIRelationship EClasses to represent these
model instances. In a model, the instances of these
meta-classes are linked to instances of the
GeneralElement and GeneralRelationship EClasses
respectively, which are their model types. These
links can include cardinality adornments to specify
multiple instances. The attributes and references of
the model instances are a subset of those of their
model types.
3.2 Process
The MDE process for traffic simulations that uses
the TML is depicted in Fig. 2. It has three stages, the
specification of the theoretical framework (activities
1-3) and the simulation (activities 4-6), and the
design of the simulation (activities 7-9).
The process starts analysing the original abstract
model (i.e. the theory) in activity 1. The purpose is
AModel-DrivenEngineeringProcessforAgent-basedTrafficSimulations
421
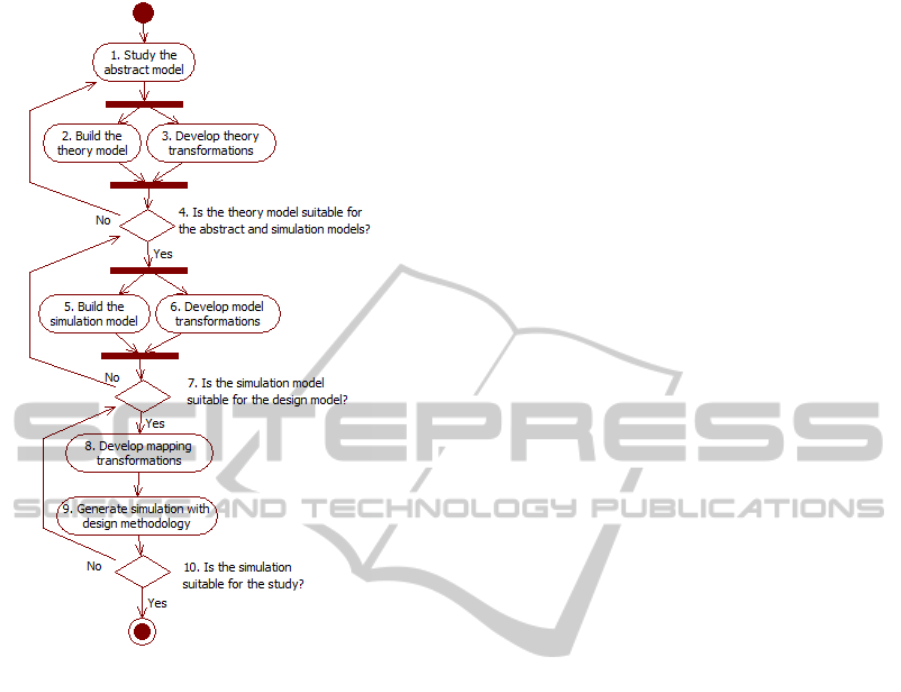
Figure 2: MDE process for traffic simulations.
to identify the main concepts it manages.
Activities 2, build the theory model, and 3,
develop theory transformations, ground the abstract
model in a specific theory model. This is an instance
of the TML that defines the main types of concepts
and relationships of a theory (i.e. the abstract
model). Researchers categorise the theory concepts
as subtypes (i.e. instances) of those types in the
TML. Relationship types must also be added at this
step, as only very general ones are included in the
TML. In this classification, researchers are guided
by the description of the elements in the metamodel
(see Section 3.1). Some information can be
automatically added using specific transformations.
For instance, a model can require that every instance
of Person is related to at least one instance of Goal
and another of Task, and these must be linked.
Traffic experts and simulation designers jointly
carry out these tasks.
In decision 4, traffic experts evaluate the theory
model considering the abstract model it represents
and the simulations to build. In particular, they need
to consider whether it provides enough guidance and
expressive power to specify those simulations. They
can decide to refine it or to move to the simulation
specification.
Activities 5 and 6 are similar to 2 and 3, but at
the level of simulation specification. Traffic experts
must create the simulation model that describes the
simulation using as concepts those from the theory
model. Specific transformations can appear here. For
instance, experts can define transformations to
initialise the simulation population (i.e. instances in
the model) when this presents a regular distribution
regarding the types of the simulation model.
The specification of the simulation ends with
decision 7. If experts decide that the model is
suitable for their study, they continue to the design
stage; if not, they review the model.
Activity 8, develop mapping transformations, is
the first of the design stage. Simulation designers are
going to use in activity 9 an existing MDE
methodology for the rest of the development. This
has its own conceptual framework. Designers map
the types in the simulation model to those of the
design ML. This step may also need to consider the
concepts implemented in the target simulation
platform, as it could happen that not all the possible
simulation-to-design mappings have the right
semantics. These mappings are implemented with
transformations. As the TML is agent-oriented, the
use of AOSE methodologies in activity 9 facilitates
these tasks.
The process ends with decision 10. Traffic
experts and designers evaluate the generated
simulation regarding the study to be carried out.
They finish then the process or continue refining the
development artefacts.
In the previous process, part of the developed
artefacts are reusable between projects. The theory
models and transformations are applicable whenever
the same theoretical background is used. Mapping
transformations are also highly reusable when the
same theoretical background and design
methodology are considered. Even simulation
models can be partly reused when simulations have
similar specifications.
Several support tools are available to help
experts and designers. Model editors are available to
specify the TML and the different models, and code
editors for transformations. These are part of
existing support in Eclipse MDE projects (Eclipse,
2015), although tailored tools can also be created.
4 CASE STUDY
The case study shows how to apply the MDE
SIMULTECH2015-5thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
422
process (see Section 3.2) to develop the simulation
of an existing study on traffic (Ehlert & Rothkrantz,
2001). It proposes a theoretical agent-based model
for people, which is here the abstract model. There
is an implementation of it as a test platform. Its
development uses a traditional code-centric process
with the Delphi object-oriented programming
language. This analysis of the original work, with
more depth, is the goal of activity 1.
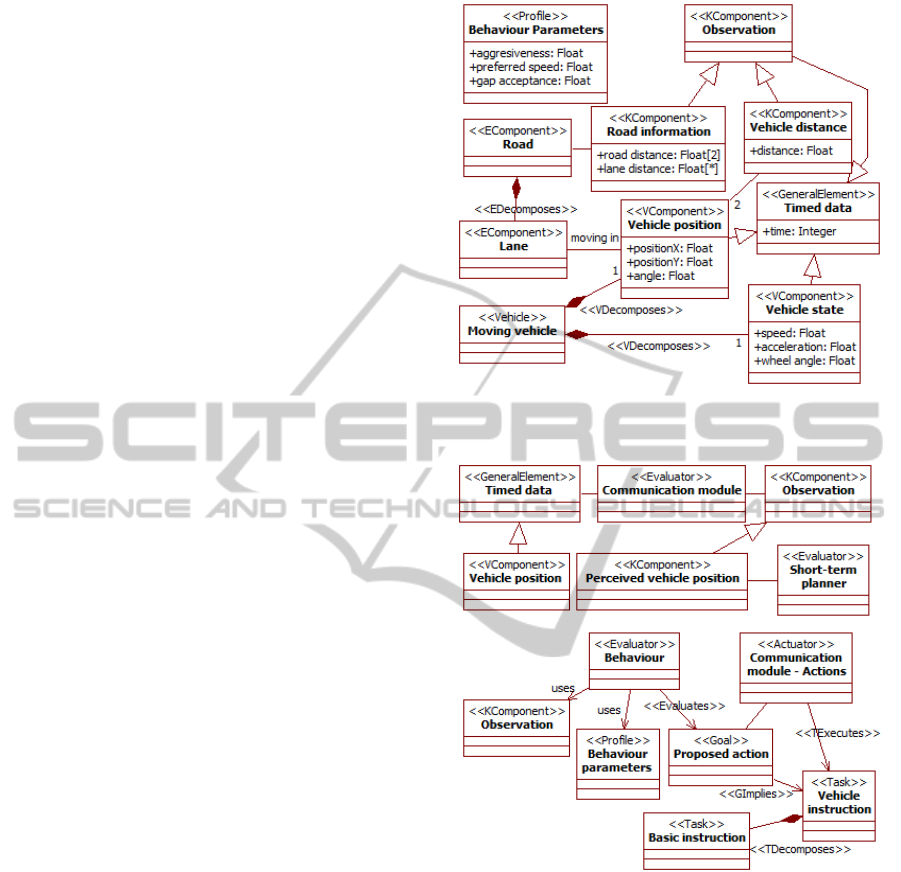
The second step of the process is the
specification of the theory model (see activity 2).
This model grounds the main abstractions of the
considered theoretical framework using the TML. In
this case, the original work describes drivers and
how they behave in the environment. Figs. 3-4 show
this model. Associations without stereotypes are
instances of GeneralRelationship. Their names are
omitted when not used in the discussion.
The environment includes a road with lanes.
These elements are EComponent instances
connected by an EDecomposes relationship in the
TML (see Section 3.1).
Moving vehicles in traffic are Vehicle instances.
In the studied work, a vehicle can provide
information of its state. Two instances of
VComponent model it. The Vehicle state instance
has attributes to represents the intrinsic state of the
vehicle, including speed or wheel angle. A vehicle
also has an extrinsic state depending on its position
on the road, which the Vehicle position instance
represents. Determining this position requires
accessing to information of the Lane instances. This
access is represented with the new moving in
instance of GeneralRelationhip.
A driver is characterised in terms of a profile with
several behavioural parameters. These do not have a
complex structure. Thus, this information is gathered
in a Behaviour parameters instance of Profile as
attributes. The person also perceives the external
environment and vehicles, and generates Knowledge
instances from this sensing. The Vehicle distance
instance informs of the perceived distance between
two vehicles, and the Road information instance of
the distances to the road and lanes limits.
In the theoretical model, decision-making needs
to know the evolution of some data over time. In
order to keep this record, the instances of
VComponent and KComponent are considered as a
subtype of a general instance Timed data of
GeneralElement. This has a time attribute to indicate
the moment of its observation.
The rest of the abstract model is focused on how
drivers behave. Being agents, they follow a
perceive-reason-act cycle with several steps.
Figure 3: Theory model for the features and internal state
and environment clusters.
Figure 4: Theory model for the interactions and decisions
cluster.
In a first step, they update their internal model of
the world using perceived data. In the TML, this
kind of modification is responsibility of evaluators.
Following the original work, the theory model
introduces an instance Communication module of
Evaluator that takes as input Timed data and
produces Observation instances of KComponent for
the agents’ internal state. For instance, this module
is responsible for perceiving the Vehicle position in
the environment and generating its own instance
Perceived vehicle position to represent it.
After processing sensor information, the agents
update the expected future positions of other
AModel-DrivenEngineeringProcessforAgent-basedTrafficSimulations
423

vehicles using a short-term planner. This
corresponds to another instance of Evaluator that
creates new instances of Perceived vehicle position.
Agents use the updated internal state to make
decisions on the potential actions they can carry out.
The abstract model refers to these decisions as
behaviours. With the TML, these are modelled as
Behaviour instances of Evaluator. They use
available information to generate Proposed actions.
that here play the role of Goals. In (Ehlert &
Rothkrantz, 2001), drivers do not have explicit
goals, but merely execute actions among those
available. For this reason, the potential actions are
seen in this theory model as goals.
The final step is the acting itself. The
communication module selects among the Proposed
actions those to perform actually, and sends to the
vehicle the instructions. In the theory model, this
corresponds to an instance Communication module –
actions of Actuator, different from the previous
instance communication module of Evaluator. It
produces for the selected goals instances of Vehicle
instruction, which are Tasks. These instances are
decomposed into Basic instructions. These are in
turn executed by instances of Moving vehicle.
According to the TML, the actuator instance can
only access to one Moving vehicle instance, which is
that belonging to its Person instance.
The previous theory model does not impose a
hard ordering of tasks: these can be executed as soon
as their required information is available. In case
that some tasks from the abstract model require strict
ordering, the related TML tasks can produce specific
instances of KComponent. Tasks starting sequences
would produce these instances, that tasks following
them would consume.
A Driver instance of Person links all the
previous instances of Profile, Knowledge, Evaluator,
and Actuator. It represents people participating in
traffic according to the abstract model.
In this case, activity 3 does not create
transformations that add information. Decision 4
considers this theory model suitable to continue with
the following activities.
The simulation model can describe some sample
settings of the original work. There are several types
of driver that differ in their behaviour parameters.
For instance, the “grandpa” and “young aggressive”
drivers have different values for preferred speed or
gap acceptance. Activity 5 models this with new
subtypes of Driver. These subtypes only provide
default values for some attributes of its base type. In
a similar way, subtypes of Road and Lane can be
introduced if needed to characterise different types
of roads, e.g. cities and highways. Although here
only attributes are considered, the TML also
supports adding relationships.
As previously for the theory model, activity 6
does not create transformations. Decision 7 accepts
this simulation model as input for the design stage.
The last specific activity of the process maps the
previous concepts to those of the chosen design
methodology. For this case study, this methodology
is INGENIAS (Pavón, Gómez-Sanz & Fuentes,
2005), which is an AOSE and MDE methodology.
Thanks to the common background of the traffic
and INGENIAS MLs in agent-based approaches,
they share several similar concepts. The Person,
Task, and Goal concepts from the TML are
respectively Person, Task, and Goal concepts in
INGENIAS. INGENIAS offers different concepts to
represent metal entities of agents. In general, factual
information as that represented by the TML
Knowledge corresponds to INGENIAS Fact
instances. The concepts mapped here have
equivalent relationships in the traffic and
INGENIAS MLs.
There are other concepts without that direct
correspondence. INGENIAS does not distinguish
between evaluators and actuators. It only considers
tasks that process information. There are mental
state managers and mental state processors that are
somehow similar to evaluators and actuators
respectively. However, they are intended to
encapsulate specific algorithms, and not to describe
the links between tasks, goals, and information. For
these reasons, TML Evaluator and Actuator
instances are mapped to INGENIAS Task instances.
In general, the INGENIAS ML has a richer
model to represent information processing, decision
making, and acting. These aspects are the core of its
modelling. The TML has more primitives to
represent the environment of agents, in particular for
traffic.
The previous mappings can be implemented as
transformations using available languages to
transform between models serialised as XML. This
is the case of the Eclipse-based tools for the TML
and the IDK. These transformations allow
generating from the simulation models the
INGENIAS models, which are the design models of
this case study. From them, a usual development
with this methodology (see activity 10) can generate
the code of the final simulation. In the case of
INGENIAS, the usual target platform is built over
Jade (Bellifemine, Caire & Greenwood, 2007),
which supports distributed agent-oriented systems.
Nevertheless, the process is general, so other
SIMULTECH2015-5thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
424

simulation platforms can be used, e.g. MATISSE
(Zalila-Wenkstern, Steel & Leask, 2009) or
MATSim (Waraich et al., 2015).
5 RELATED WORK
The kind of development for traffic simulations
proposed in this work is related to several lines of
research. It has to deal with conceptual frameworks
and MLs for this domain, as well as development
approaches for these simulations.
As said in the introduction, traffic studies have a
wide variety of concerns and settings. There are
works focused on, for instance (Elvik et al., 2009;
Pursula, 1999; Ward, 2004), road congestion, safety,
parking, or factors affecting driving. This variety
makes useful different theories and simulation
approaches depending on the actual study.
Conceptual frameworks are quite diverse
(Barceló, 2010; Pursula, 1999). Nevertheless, some
key concepts are recurrent in them: people (mainly
drivers, but sometimes also pedestrians), vehicles,
and the environment (most of times at least the road
where vehicles move, but sometimes only the
driver’s visual field). Most of reviewed works fail to
deal with this variety, as they fall in one of two
extremes: they try to be too comprehensive (and
become too general to provide guidance when
modelling), or they consider a narrow domain (what
drastically reduces its applicability outside it).
The type of considered simulation also affects
the concepts available to model it. There are
macroscopic simulations (e.g. with models for traffic
flows based on gas and fluid dynamics (Helbing et
al., 2001)), microscopic ones (e.g. with cellular
automata (Maerivoet & De Moor, 2005)), and
mesoscopic ones (e.g. combining discrete-event and
queues approaches (Burghout, Koutsopoulos &
Andreasson, 2006)). For these simulations,
researchers use ad-hoc implementations for specific
studies or platforms of general use (Barceló, 2010).
In them, there are different abstractions to develop
simulations. These depend on the underlying
conceptual framework, but also on the code
components.
Literature has proposed agent-based approaches
to integrate these perspectives (Doniec et al., 2008),
both at the level of conceptual frameworks and
implementations. There are several frameworks
considering the agent concept, such as MATSim
(Waraich et al., 2015), MATISSE (Zalila-
Wenkstern, Steel & Leask, 2009), or the work of
Radecký and Gajdŏs (2006). Nevertheless, its actual
definition presents a great variability. For instance,
MATSim agents define their routes and times, but
use algorithms and utility functions to optimise
routes. In MATISSE, agents are closer to those of
the presented approach, with interaction, planning,
and task modules. Radecký and Gajdŏs base their
implementation in Agent Behaviour Diagrams
(ABD), a form of activity diagrams that can be
implemented as finite state machines in the Jade
platform (Bellifemine, Caire & Greenwood, 2007).
Such platforms are tied to the concepts they provide
for simulation, as it happens with non agent-oriented
platforms. Experts need to adhere to their conceptual
frameworks for their simulations, independently on
whether they are or not the best suited for their
studies. For instance, traffic works considering
statistical distributions of traffic, do not need the
overhead of agent models as those in these
platforms.
In this context, the development process can play
a key role to adapt the existing infrastructures to the
actual needs of studies. The can provide guidance on
how to perform certain development tasks. Though
there are few reports on these issues, available
information mainly corresponds to traditional code-
centric approaches (Bellifemine, Caire &
Greenwood, 2007; Ehlert & Rothkrantz, 2001;
Radecký and Gajdŏs, 2006). These give guidelines
to structure code and the related algorithms. When
they use models (Bellifemine, Caire & Greenwood,
2007; Radecký and Gajdŏs, 2006), their purpose is
enabling design, discussion, and documentation.
Programmers manually code them. There are few
examples of MDE approaches, like (de Lara,
Vangheluwe & Mosterman, 2006). They are
illustrative of some advantages already mentioned
for our approach, such as the high-level specification
of simulations and making explicit all the relevant
information through models. However, these
examples frequently fail to involve some groups of
experts. They try to cover the complete development
cycle, from requirements to coding, while their
infrastructures are typically oriented to only some
stages. Moreover, they use formalisms and
languages that are not widely used in the community
of MDE. The work in (de Lara, Vangheluwe &
Mosterman, 2006), which bases development on
graph rewriting techniques, is an example of it.
6 CONCLUSIONS
This paper has introduced an approach for the MDE
of traffic simulations. It proposes a complete process
AModel-DrivenEngineeringProcessforAgent-basedTrafficSimulations
425

with two stages, a first one focused on traffic experts
and a second one on simulation designers. The first
stage uses a specific TML and standard tools from
Eclipse projects. This makes possible providing
tailored tools for these experts. The second part links
to existing MDE AOSE methodologies for the low-
level (i.e. platform-oriented) design. The result is a
process that provides new infrastructures to support
traffic experts, while it takes advantage of existing
efforts to support the specific tasks of simulation
designers.
Regarding the TML that is the core of the work,
its design balances providing modelling guidance
and flexibility. The first feature is achieved adopting
as its conceptual basis two widely used approaches
in the area, the DVE model (Amditis et al., 2010)
and ABM (Axtell & Epstein, 1994). The flexibility
is achieved incorporating mechanisms to easily
extend the language through inheritance and
composition, both at the level of types and instances
in models. These combined features allow keeping
the TML set of primitives intentionally simple,
while supporting its adaptation to the specific needs
of studies.
The case study has illustrated the features of the
process by modelling an existing traffic model
(Ehlert & Rothkrantz, 2001), and using and AOSE
methodology (Pavón, Gómez-Sanz & Fuentes, 2005)
for design and coding. The development of the
simulation mainly makes use of model editors. It
uses transformations in the transition from the TML
specifications to INGENIAS models. At that point, a
standard AOSE development with that methodology
takes place.
The work presented here still has several open
issues. The first one is considering additional
theories and frameworks in order to check the
validity of the TML, and incorporating new
primitives if needed. Secondly, though the case
study needed few transformations, this is not always
the case. Besides adding information to models, they
can also be useful to check automatically properties.
The use of transformation languages (Bézivin, 2006)
helps non-experts in MDE to understand mappings,
but developing transformations is still a hard work.
The exploration of transformation-by-example
approaches (García-Magariño, Gómez-Sanz &
Fuentes-Fernández, 2009) to generate automatically
transformations from model instances is an
alternative. Finally, though design methodologies
(e.g. INGENIAS in the case study) can consider
distribution issues for simulation, their figures
regarding components are not usually those of
complex traffic simulations. Further experimentation
is required here to identify potential requirements in
design for these aspects.
ACKNOWLEDGEMENTS
This work has been done in the context of the
projects “Social Ambient Assisting Living -
Methods (SociAAL)” (TIN2011-28335-C02-01)
supported by the Spanish Ministry for Economy and
Competitiveness, and the research programme
MOSI-AGIL-CM (grant S2013/ICE-3019)
supported by the Autonomous Region of Madrid and
co-funded by EU Structural Funds FSE and FEDER.
Also, we acknowledge support from the “Programa
de Creación y Consolidación de Grupos de
Investigación” (UCM-BSCH GR35/10-A).
REFERENCES
Amditis, A., Pagle, K., Joshi, S., Bekiaris, E., 2010.
Driver-Vehicle-Environment monitoring for on-board
driver support systems: Lessons learned from design
and implementation. Applied Ergonomics. 41(2), p.
225-235.
Axtell, R., Epstein, J., 1994. Agent-based modeling:
understanding our creations. The Bulletin of the Santa
Fe Institute. 9, p. 28-32.
Barceló, J. (ed.), 2010. Fundamentals of traffic simulation.
International Series in Operations Research &
Management Science, 145, Springer. Heidelberg,
Germany.
Bellifemine, F. L., Caire, G., Greenwood, D., 2007.
Developing multi-agent systems with JADE, John
Wiley & Sons. Hoboken, NJ, USA.
Bézivin, J., 2006. Model driven engineering: An emerging
technical space. In: Lämmel, R., Saraiva, J., Visser, J.
(eds.) Generative and Transformational Techniques in
Software Engineering, Lecture Notes in Computer
Science 4143, p. 36-64. Heidelberg, Germany:
Springer.
Burghout, W., Koutsopoulos, H. N., Andreasson, I., 2006.
A discrete-event mesoscopic traffic simulation model
for hybrid traffic simulation. In 2006 IEEE Intelligent
Transportation Systems Conference (ITSC 2006).
Toronto, Canada, 17-20 September 2006. Washington,
DC, USA: IEEE Computer Society. p. 1102-1107.
Doniec, A., Mandiau, R., Piechowiak, S., Espié, S., 2008.
A behavioral multi-agent model for road traffic
simulation. Engineering Applications of Artificial
Intelligence. 21(8), p. 1443-1454.
Eclipse, 2015. Eclipse Modeling. [Online] Available from:
http://eclipse.org/modeling/ [Accessed: 10 March
2015]
Ehlert, P. A. M., Rothkrantz, L. J. M., 2001. Microscopic
traffic simulation with reactive driving agents. In 2001
SIMULTECH2015-5thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
426

International Conference on Intelligent
Transportation Systems (ITSC 2001). Oakland, CA,
USA, 25-29 August 2001. Washington, DC, USA:
IEEE Computer Society. p. 860-865.
Elvik, R., Vaa, T., Erke, A., Sorensen, M., 2009. The
handbook of road safety measures, Emerald Group
Publishing. Bingley, UK, 2
nd
edition.
France, R., Rumpe, B., 2007. Model-driven development
of complex software: A research roadmap. In 2007
Future of Software Engineering (FoSE 2007).
Minneapolis, MN, USA, 23-25 May 2008.
Washington, DC, USA: IEEE Computer Society. p.
37-54.
Fuentes-Fernández, R., Hassan, S., Pavón, J., Galán, J. M.,
López-Paredes, A., 2012. Metamodels for role-driven
agent-based modelling. Computational and
Mathematical Organization Theory. 18(1), p. 91-112.
Galán, J., Izquierdo, L., Izquierdo, S., Santos, J., del
Olmo, R., López-Paredes, A., Edmonds, B., 2009.
Errors and artefacts in agent-based modelling. Journal
of Artificial Societies and Social Simulation. 12(1), p.
1.
García-Magariño, I., Gómez-Sanz, J. J., Fuentes-
Fernández, R., 2009. Model transformation by-
example: an algorithm for generating many-to-many
transformation rules in several model transformation
languages. In: Paige, R. F. (ed.) Theory and Practice
of Model Transformations, Lecture Notes in Computer
Science 5563, p. 52-66. Heidelberg, Germany:
Springer.
Helbing, D., Hennecke, A., Shvetsov, V., Treiber, M.,
2001. MASTER: macroscopic traffic simulation based
on a gas-kinetic, non-local traffic model.
Transportation Research Part B: Methodological.
35(2), p. 183-211.
Henderson-Sellers, B., Giorgini, P. (eds.), 2005. Agent-
oriented methodologies, IGI Global. Hershey, PA,
USA.
Kleppe, A. G., Warmer, J., Bast, B., 2003. MDA
Explained: The Model Driven Architecture - Practice
and Promise, Addison-Wesley. Reading, MA, USA.
Krajzewicz, D., Erdmann, J., Behrisch, M., Bieker, L.,
2012. Recent development and applications of SUMO
- simulation of urban mobility. International Journal
on Advances in Systems and Measurements. 5(3-4), p.
128-138.
de Lara, J., Vangheluwe, H., Mosterman, P. J., 2006.
Modelling and analysis of traffic networks based on
graph transformation. In 5th Symposium on Formal
Methods for Automation and Safety in Railway and
Automotive Systems (FORMS/FORMATS 2004).
Braunschweig, Germany, 2-3 December 2004.
Braunschweig, Germany: Technical University of
Braunschweig, Institute for Traffic Safety and
Automation Engineering. p. 120-127.
Maerivoet, S., De Moor, B., 2005. Cellular automata
models of road traffic. Physics Reports. 419(1), p. 1-
64.
Mu, L., Gjøsæter, T., Prinz, A., Tveit, M. S., 2010.
Specification of modelling languages in a flexible
meta-model architecture. In 4th European Conference
on Software Architecture (ECSA 2010), companion
volume. Copenhagen, Denmark, 23-26 August 2010.
New York, NY, USA: ACM. p. 302-308.
Object Management Group (OMG), 2013. OMG Unified
Modeling Language (OMG UML), Version 2.5.
[Online] Available from: http://www.omg.org/
[Accessed: on 10 March 2015).
Pavón, J., Gómez-Sanz, J. J. Fuentes, R. (2005) The
INGENIAS methodology and tools. In: Henderson-
Sellers, B., Giorgini, P. (eds.) Agent-oriented
methodologies, p 236-276. Hershey, PA, USA: IGI
Global.
Pursula, M., 1999. Simulation of traffic systems - An
overview. Journal of Geographic Information and
Decision Analysis. 3(1), p. 1-8.
Radecký, M., Gajdŏs, P., 2006. Intelligent agents for
traffic simulation. In 2008 Spring Simulation
Multiconference (SpringSim 2008). Ottawa, Canada,
14-17 April 2008. San Diego, DC, USA: Society for
Computer Simulation International. p. 109-115.
Steinberg, D., Budinsky, F., Paternostro, M., Merks, E.,
2009. EMF: Eclipse Modeling Framework, Pearson
Education. Upper Saddle River, NJ, USA, 2
nd
edition.
Waraich, R. A., Charypar, D., Balmer, M., Axhausen, K.
W., 2015. Performance Improvements for Large-Scale
Traffic Simulation in MATSim, Springer. Heidelberg,
Germany.
Ward, S., 2004. Planning and urban change, SAGE.
London, UK, 2
nd
edition.
Zalila-Wenkstern, R., Steel, T., Leask, G., 2009. A self-
organizing architecture for traffic management. In:
Weyns, D., Malek, S., de Lemos, R., Andersson, J.
(eds.) Self-Organizing Architectures, LNCS 6090, p.
230-250. Heidelberg, Germany: Springer.
AModel-DrivenEngineeringProcessforAgent-basedTrafficSimulations
427
