
The Optimal Control Problems of Nonlinear Systems
M. N. Kalimoldayev, M. T. Jenaliyev, A. A. Abdildayeva and L. S. Kopbosyn
Institute of Informational and Computational Tehnologies, MES RK, Pushkin Str. 125, Almaty, Kazakhstan
K
eywords:
Electric Power System, Nonlinear System, Phase System, Control Synthesis, Bellman-Krotov Function.
Abstract:
This article discusses the optimal control problem of nonlinear systems, which are described by ordinary dif-
ferential equations, their right parts are periodic in the angular coordinate. The particularity of the considered
in the given work nonlinear control problems is that they take into account the fact that on unfairly long interval
of time, preservation of a deviation of any subsystem of controlled system from nominal operating conditions
conducts to danger of destruction and unbalance of other subsystems and even of all the system as a whole.
Consideration was given to a numerical example of the optimal motion control of two-machine power system.
1 INTRODUCTION
The mathematical model of the modern electric power
complex, consisting of turbine generators and com-
plex multiply-connected energy blocks, is a system of
nonlinear ordinary differential equations. The opti-
mization problem, and the creation of algorithms for
constructing of controls by the principle of feedback
for such systems is actual and still attracts the atten-
tion of many researchers.
In this work while solving the problem of control
synthesis for the considered electric power system,
the constructions of the method of Bellman-Krotov
function in the form of necessary and sufficient opti-
mality conditions were used (V. F. Krotov, 1996)–(V.
I. Gurman, 1997).
2 STATEMENT OF THE
PROBLEM
It is required to minimize the functional
J(u) = 0.5
l
∑
i=1
Z
T
0
k
i
y
2
i
+ r
i
u
2
i
exp{γ
i
t}dt+
+Λ(x(T), y(T)),
(1)
under the conditions:
dx
i
dt
= y
i
,
dy
i
dt
= −λ
i
y
i
− f
i
(x) + b
i
u
i
,
x
i
(t
0
) = x
i0
, y
i
(t
0
) = y
i0
, i = 1, l, t ∈ (t
0
, T) (2)
x(t), y(t) : (t
0
, T) → R
l
,
where u
i
∈ R is scalar control; f
i
(x) is a continuously
differentiable scalar function satisfying the integrabil-
ity condition:
∂f
i
(x)
∂x
k
=
∂f
k
(x)
∂x
i
, ∀i 6= k; (3)
moments of time t
0
, T are assumed to be given;
r
i
, γ
i
, λ
i
are positive constants, k
i
(t) are positive func-
tions and the terminal value of x(T) , y(T) are un-
known beforehand.
It should be noted that if inequalities took place
γ
i
< 0, i = 1, 2, . . . .l, then these coefficients would
reflect the fact of discounting (playing the important
role in economical problems). In our case, these co-
efficients are positive,that, naturally, imposes in con-
trol problem(1)–(3) additional requirements on the
condition function x
i
(t
0
), y
i
(t
0
), i = 1, 2, . .. , l,
and control u
i
(t), i = 1, 2, . . . , l, so that they in
view of weight coefficients k
i
(t), r
i
, i = 1, 2, . . . , l,
decreased faster than the exponent exp{γ
i
t} , i =
1, 2. . . , l, and also provided definiteness of integral
(1). It becomes essentially important obviously when
time T is great enough.
As it is known, in many, including complex, tech-
nical devices, ”danger” of deviations of controlled
system from a normal natural operating regime in
time does not decrease, and can only grow. The of-
fered quality functional (1) allows, first, to struggle
with the specified ”danger” promptly and efficiently.
Second, after return of the system to the normal op-
erating regime of work it provides disappearance of
control influences as soon as possible.
The problem of synthesis for the Cauchy problem
(1)–(3) is very important for the problems of electric
186
Kalimoldayev M., Jenaliyev M., Abdildayeva A. and Kopbosyn L..
The Optimal Control Problems of Nonlinear Systems.
DOI: 10.5220/0005537701860190
In Proceedings of the 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2015), pages 186-190
ISBN: 978-989-758-122-9
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

power systems work optimization.
2.1 The Main Lemma
Following to the Bellman-Krotov formalism (V. F.
Krotov, 1996)–(V. I. Gurman, 1997), we will show
the correctness of the following lemma.
Lemma. In order to provide the optimal control
of u
0
i
(y
i
) = −
b
i
r
i
exp{−γ
i
t} y
i
, i =
1, l and the corre-
sponding solution of the system (2)–(3) {x(t), y(t)},
it is necessary and sufficient that
K(x(T) , y(T)) = Λ(x(T),y(T)),
k
i
(t) = 2λ
i
exp{−γ
i
t} +
b
2
i
r
i
exp{−2γ
i
t} > 0,
i ∈
1, l,
(4)
K (x, y) = 0.5
l
∑
i=1
y
2
i
−
−
l
∑
i=1,
x
j
=0,
j>i
x
i
Z
0
f
i
(x
1
, . . . ,x
i−1
, ξ
i
, x
i+1
, .., x
l
)dξ
i
is the Bellman-Krotov function and besides,
J
u
0
= min
u
J(u) = K(x(t
0
), y(t
0
)).
2.2 Proof
For continuously differentiable function K (x, y) func-
tional (1) has the view:
J(u) = J(x(t) , y(t), u(t)) =
T
Z
t
0
R[x(t) , y(t), u(t)]dt+
+ m
1
(x(T), y(T)) + m
0
(x(t
0
), y(t
0
)),
(5)
where
R[x, y, u] =
l
∑
i=1
K
x
i
y
i
+ K
y
i
(−λ
i
y
i
− f
i
(x) + b
i
u
i
)+
+
1
2
k
i
y
2
i
+ r
i
u
2
i
exp{γ
i
t} ,
(6)
m
1
(x, y) = −K (x, y) + Λ(x, y),
m
0
(x, y) = K (x, y),
(7)
K
x
i
=
∂K
∂x
i
, K
y
i
=
∂K
∂y
i
, i =
1, l.
To find the Bellman-Krotov function K(x, y) we use
the Cauchy problem:
(
inf
u
R[x, y, u] = 0, t ∈ (t
0
, T),
K(x(T) , y(T)) = Λ(x(T),y(T)).
(8)
Assuming that
K
x
i
y
i
= K
y
i
f
i
(x), K
y
i
= y
i
,
K
x
i
= f
i
(x), i =
1, l.
(9)
Taking into account (9), from (8) we obtain:
u
i
(y
i
) = −
b
i
r
i
exp{−γ
i
t} y
i
,
k
i
(t) = 2λ
i
exp{−γ
i
t} +
b
2
i
r
i
exp{−2γ
i
t} > 0,
r
i
> 0, i ∈
1, l.
(10)
By virtue of integrability conditions of (3) and
the assumptions (9) we get the representation of the
Bellman-Krotov function (4).
From (8) it also follows that the value of the ter-
minal term of the functional (1) is defined by:
Λ(x(T) , y(T)) = K(x(T), y(T)).
By virtue of the representations (6)–(7) along the
optimal control (10) the value of the functional J(u)
(1) will be equal:
J
u
0
= min
u
J(u) = K(x(t
0
), y(t
0
)).
To complete the proof of lemma, it remains only
to note that the existence of Bellman-Krotov function
in the form (4) provides not only the sufficiency of the
optimality conditions (8), but also their necessity.
3 THE OPTIMUM CONTROL
PROBLEM OF PHASE SYSTEM
Let us consider the problem of functional minimiza-
tion:
J(ν) = J(ν
1
. . . , ν
l
) = 0.5
l
∑
i=1
T
Z
0
w
s
i
S
2
i
+ w
ν
i
ν
2
i
∗
∗ exp{γ
i
t} dt + Λ(δ(T), S(T)),
(11)
under the conditions:
dδ
i
dt
= S
i
,
H
i
dS
i
dt
= −D
i
S
i
− f
i
(δ
i
) − N
i
(δ
i
) + ν
i
,
δ = (δ
1
, . . . ,δ
l
), S = (S
1
, . . . ,S
l
),
(12)
where w
s
i
, w
ν
i
are weight coefficients, correspond-
ingly positive functions and constants; H
i
is an iner-
tial constants; f
i
(δ
i
) are 2π-periodical continuously
differentiated functions; N
i
(δ) 2π-periodical con-
tinuous differentiated function srelative to δ
1
, . . . ,δ
l
;
TheOptimalControlProblemsofNonlinearSystems
187

for summands N
i
(δ)– the conditions of integrability
are carried out (3); T is duration of transient process
which is considered as specified.
The system of the equations (12) are supple-
mented with initial conditions
δ
i
(0) = δ
i0
, S
i
(0) = S
i0
, i = 1, . . . , l. (13)
Terminal values δ(T), S(T) are beforehand un-
known, so they also should be determined.
The following theorem is valid.
Theorem 1. For optimization of controls
ν
0
i
(S
i
,t) = −[w
ν
i
]
−1
exp{−γ
i
t}S
i
, i = 1, . . . , l,
and their corresponding solution
δ
0
(t), S
0
(t)
of
system (12)–(13), it is necessary and sufficient, that
Λ(δ(T), S(T)) = K(δ(T) , S(T)),
w
s
i
(t) = 2D
i
exp{−γ
i
t} + [w
ν
i
]
−1
exp{−2γ
i
t} > 0,
i = 1, . . . , l,
where
K(δ, S) = 0.5
l
∑
i=1
H
i
S
2
i
+
Z
δ
i
0
f
i
(δ
i
)dδ
i
+
+
l
∑
i=1,
δ
j
=0,
j>i
δ
i
Z
0
N
i
(δ
1
, . . . , δ
i−l
, δ
i+1
, . . . ,δ
l
)dξ
i
,
(14)
Bellman-Krotov function and besides,
J
v
0
= min
v
J(v) = K
δ
0
, S
0
.
The proof of the theorem 1 is received, applying the
procedure of construction of Bellman-Krotov func-
tion suggested in 2 (see proof of lemma).
4 THE OPTIMAL CONTROL
PROBLEM OF POWER OF
STEAM TURBINES
One of the models describing the transients in the
electrical system is the following system of differen-
tial equations (I. I. Blekhman, 1997)–(A. A. Gorev,
2004):
dδ
i
dt
= S
i
, H
i
dS
i
dt
= −D
i
S
i
− E
2
i
Y
ii
sinα
ii
−
−P
i
sin(δ
i
− α
i
) −
l
∑
j=1, j6=i
P
ij
sin(δ
ij
− α
ij
) + u
i
,
i ∈
1, l, t ∈ (0, T),
(15)
δ
ij
= δ
i
− δ
j
, P
i
= E
i
UY
i,n+1
, P
ij
= E
i
E
j
Y
ij
,
where δ
i
is an angle of rotor turn of i-th generator with
respect to some synchronous rotational axis (the axis
of rotation of bus-bares of constant voltage, which ro-
tates at the speed of 50 r./sec.; S
i
is sliding of i-th gen-
erator; H
i
is an inertial constant of the i-th machine; u
i
is mechanical power, which are led to the generator;
E
i
– EMF of the i-th machine; Y
ij
– mutual conductiv-
ity of i-th and j-th branches of the system; U = const
is bus-bar voltage of constant voltage; Y
i,n+1
–defines
the bond (conductivity) of i-th generator with bus-bar
of constant voltage; D
i
= const ≥ 0 is mechanical
damping; α
ij
, α
i
are constant values which take into
account the influence of active resistance in the stator
chains of generators.
The complexity of the analysis of the model (15)
is taking into account of α
ij
, α
ij
= α
ji
. Since in this
case δ
ij
= −δ
ji
, then the model (15) is not conserva-
tive; one fails to build the Lyapunov’s function in the
form of the first integral for it. The system is called
positional model.
Let the state variables and control variables in the
steady after-emergency regime be equal to:
S
i
= 0, δ
i
= δ
F
i
, u
i
= u
F
i
, i = 1, l. (16)
To obtain the system of the disturbed movement we
should proceed to the equations of deviations assum-
ing:
S
i
= ∆S
i
, δ
i
= δ
F
i
+ ∆δ
i
,
u
i
= u
F
i
+ ∆u
i
, i =
1, l.
(17)
Further, for the convenience we denote again the vari-
ables ∆u
i
, ∆δ
i
, ∆S
i
by u
i
, δ
i
, S
i
and from (15),(16)
we obtain:
dδ
i
dt
= S
i
,
dS
i
dt
=
1
H
i
[−D
i
S
i
− f
i
(δ
i
) − N
i
(δ) + M
i
(δ) + u
i
],
i =
1, l, t ∈ (0, T),
(18)
where
f
i
(δ
i
) = P
i
sin
δ
i
+ δ
F
i
− α
i
− sin
δ
F
i
− α
i
,
N
i
(δ) =
l
∑
j=1, j6=i
N
ij
(δ
1
, . . . ,δ
l
) =
=
l
∑
j=1, j6=i
Γ
1
ij
sin
δ
ij
+ δ
F
ij
− sinδ
F
ij
,
M
i
(δ) =
l
∑
j=1, j6=i
M
ij
(δ
1
, . . . ,δ
l
) =
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
188

= Γ
2
ij
cos
δ
ij
+ δ
F
ij
− cosδ
F
ij
,
Γ
1
ij
= P
ij
cosα
ij
, Γ
2
ij
= P
ij
sinα
ij
, P
ij
= P
ji
,
Γ
k
ij
= Γ
k
ji
, k = 1, 2.
The control will be searched in the form of:
u
i
= ν
i
− M
i
(δ), i =
1, l, (19)
where the function ν
i
should be determined.
It is required to minimize the functional
J(ν) = J(ν
1
, . . . ,ν
l
) =
= 0.5
l
∑
i=1
Z
T
0
w
s
i
S
2
i
+ w
ν
i
ν
2
i
∗
∗exp{γ
i
t}dt + Λ(δ(T), S(T)),
(20)
under the conditions (18)–(19), where w
s
i
, w
ν
i
are
weight coefficients, correspondingly positive func-
tions and constants; f
i
(δ
i
) is 2π-periodic continu-
ously differentiable function; N
i
(δ)2π-periodic con-
tinuously differentiable function with respect to δ
ij
;
for N
i
(δ) the integrability condition of the type (3) is
realized; T is duration of the transition process which
is considered to be given. In addition, the initial con-
ditions are given:
δ
i
(0) = δ
i0
, S
i
(0) = S
i0
, i =
1, l, (21)
and the values δ
i
(T) , S
i
(T) are unknown.
On the basis of the lemma from 2 we obtain
Theorem 2. In order to optimal control
ν
0
i
(S
i
,t) = − [w
ν
i
]
−1
exp{−γ
i
t}S
i
, i =
1, l,
and the corresponding solution
δ
0
(t), S
0
(t)
of sys-
tem (18), (20) it is necessary and sufficient that
Λ(δ(T), S(T)) = K (δ(T), S(T)),
w
s
i
(t) = 2D
i
exp{−γ
i
t} + [w
ν
i
]
−1
exp{−2γ
i
t} > 0,
i =
1, l,
K(δ, S) = 0.5
l
∑
i=1
H
i
S
2
i
+
Z
δ
i
0
f
i
(δ
i
)dδ
i
+
l
∑
i=1,
δ
j
=0,
j>i
Z
δ
i
0
N
i
(δ
1
, . . . ,δ
i−l
, ξ
i
, δ
i+1
, . . . ,δ
l
)dξ
i
Bellman-Krotov function, and besides,
J
ν
0
= min
ν
J(ν) = K
δ
0
, S
0
. (22)
It should be noted that in the proof of the theorem
2, assumptions (9) from the lemma take the form:
K
δ
i
S
i
=
K
S
i
H
i
[ f
i
(δ
i
) + N
i
(δ)], (23)
i.e.
K
S
i
= H
i
S
i
, K
δ
i
= f
i
(δ
i
) + N
i
(δ), i =
1, l.
5 THE NUMERICAL EXAMPLE.
OPTIMAL CONTROL OF THE
MOVEMENT OF
TWO-MACHINE ELECTRIC
POWER SYSTEM
In the system (15) we accept that i = 1, 2, and as-
sume that the mechanical damping is absent, i.e., co-
efficients D
1
, D
2
are equal to zero. According to the
relations (15)–(21) the optimal control problem takes
the form (I. I. Blekhman, 2004):
J(ν) = J(ν
1
, ν
2
) = 0.5
2
∑
i=1
Z
T
0
S
2
i
+ 0.1ν
2
i
∗
∗exp{γ
i
t}dt + 0.5
δ
2
(T) + S
2
(T)
,
(24)
dδ
i
dt
= S
i
,
dS
i
dt
=
1
H
i
[− f
i
(δ
i
) − N
1
(δ) + ν
i
],
i = 1, 2,
(25)
where
f
i
(δ
i
) = P
i
sin
δ
i
+ δ
F
i
− α
i
− sin
δ
F
i
− α
i
, i= 1 2,
N
1
(δ) = Γ
1
sin
δ
12
+ δ
F
12
− sinδ
F
12
,
M
1
(δ) = Γ
2
cos
δ
12
+ δ
F
12
− cosδ
F
12
,
δ
F
12
= δ
F
1
− δ
F
2
,
Γ
1
= P
12
cosα
12
, Γ
2
= P
12
sinα
12
,
δ
12
= δ
1
− δ
2
, δ
21
= −δ
12
.
The numerical data of the system (25):
γ
1
= γ
2
= 0.1;
α
1
= −0.052; α
2
= −0.104;
H
1
= 2135; H
2
= 1256; P
1
= 0.85;
P
2
= 0.69; P
12
= 0.9;
δ
F
1
= 0.827; δ
F
2
= 0.828, α
12
= −0.078;
and the initial data:
δ
1
(0) = 0.18; δ
2
(0) = 0.1;
S
1
(0) = 0.001; S
2
(0) = 0.002.
(26)
According to formula (22) Bellman-Krotov func-
tion and its partial derivatives will have the form:
K(δ, S) ≈ 1067.5S
2
1
+628S
2
2
+2.004−cos(δ
1
+ 0.879)−
−0.77δ
1
− cos(δ
2
+ 0.932)− 0.83δ
2
,
K
δ
1
(δ, S) = 0.425[sin(δ
1
+ 0.879)− sin0.879]+
+0.9sin(δ
1
− δ
2
),
K
δ
2
(δ, S) = 0.345[sin(δ
2
+ 0.932)− sin0.932]+
+0.9sin(δ
1
− δ
2
),
TheOptimalControlProblemsofNonlinearSystems
189
K
S
1
(δ, S) = 2135S
1
, K
S
2
(δ, S) = 1256S
2
.
Controls on the feedback principle (synthesis) are
determined by the formulas:
ν
0
1
(δ, S) = − exp{−0.1t}S
1
,
ν
0
2
(δ, S) = − exp{−0.1t}S
2
,
(27)
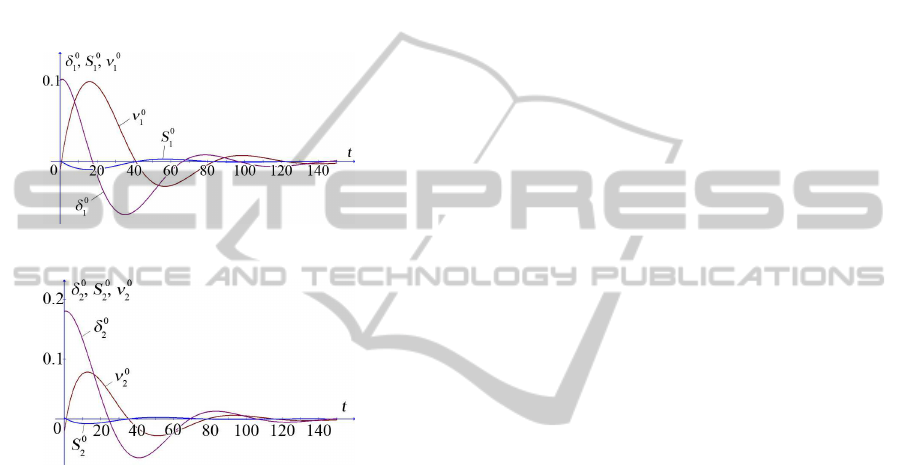
herewith the assumption was used (23). The re-
sults of numerical calculation of the optimal pair of
vector-functions state-control { δ
0
(t), S
0
(t); ν
0
(t) =
ν
0
δ
0
(t), S
0
(t)
the obtained from (25)–(27), as
shown on the Figures 1 and 2.
Figure 1.
Figure 2.
6 CONCLUSIONS
On the basis of the theoretical results, the computa-
tional experimentswere conducted, which showed the
sufficient efficacy of the proposed procedure for con-
structing the function of Bellman-Krotov and the syn-
thesising optimal control for the given power system.
ACKNOWLEDGEMENTS
This work is partially supported by Grant
No.0925/GF1 of a Science Committee of the
Ministry of Education and Science of the Republic of
Kazakhstan.
REFERENCES
A. A. Gorev (2004). Transient processes of the synchronous
machine. M. Fizmatlit.
I. I. Blekhman (1997). Expansion principle in problems of
control. M. Fizmatlit.
I. I. Blekhman, A. (2004). On general definitions of syn-
chronization. In Selected topics in vibrational me-
chanics. World Scientific.
V. F. Krotov (1996). Global methods in optimal control
theory. M.Dekker.
V. I. Gurman (1997). Expansion principle in problems of
control. M. Fizmatlit.
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
190
