
RCON: Dynamic Mobile Interfaces for Command and Control of
ROS-enabled Robots
Robert Codd-Downey and Michael Jenkin
Center for Field Robotics, Department of Electrical Engineering and Computer Science, York University,
4700 Keele Street, M3J 1P3, Toronto, Ontario, Canada
Keywords:
ROS, Human-robot Interaction, Teleoperation, iOS.
Abstract:
The development of effective user interfaces for an autonomous system can be quite difficult, especially for
devices that are to be operated in the field where access to standard computer platforms may be difficult
or impossible. One approach in this type of environment is to utilize tablet or phone devices, which when
coupled with an appropriate tool such as ROSBridge can be used to connect with standard robot middleware.
This has proven to be a successful approach for devices with mature user interface requirements but may
require significant software development for experimental systems. Here we describe RCON, a software tool
that allows user interfaces on iOS devices to be configured on the device itself, in real time, in response to
changes in the robot software infrastructure or the needs of the operator. The system is described in detail
along with the accompanying communication framework and the process of building a user interface for a
simple autonomous device.
1 INTRODUCTION
True autonomy does not usually exist in today’s com-
mercial and academic robots. Typically these sys-
tems are designed to take operational directives from
a human operator and communicate results back to
the operator in a meaningful way. This human robot
interaction problem is typically approached using a
fixed point control station equipped with monitors
and haptic controllers (e.g., Joysticks, Mice). While
these control stations offer many benefits they lack
the mobility necessary for high situational awareness
in extended range applications. A mobile operator
equipped with a portable device such as a laptop or
netbook offers this situational awareness on hardware
compatible with the target robot but commercial ver-
sions of such devices are not hardened for operations
outdoors. When considering the inclement weather
so often encountered with field robotics the trade-
off between cumbersome equipment and environmen-
tal protection becomes apparent. Commercial off the
shelf mobile electronics such as iOS and Android de-
vices present an inexpensive alternative to custom en-
vironment and weather-hardened equipment. Protect-
ing these devices from the elements is inexpensive
and has a minimal affect on their portability. That
being said, these devices do not generally support the
traditional range of robot software development and
operational tools offered on laptop/netbook platforms.
The use of mobile devices for human robot in-
teraction has been actively explored in past. Pock-
etCERO (Httenrauch and Norman, 2001), one of the
first forays into this area of research, was limited by
a lack of standardization across robotic platforms and
computational resources available on mobile devices
at the time. Implementations on more modern An-
droid devices such as, (Wu and Chen, 2004) have
demonstrated human robot interaction using a specific
hardware platform.
The acceptance of ROS (Quigley et al., 2009) as a
standard middleware for autonomous devices, at least
in the research domain, has simplified the develop-
ment of robot-user interaction substantively. Perhaps
the simplest method developing a human-ROS-based
robot interaction system on a tablet device would be
to deploy a full fledged ROS installation on the tar-
get device. This would provide software developed
on the device access to the full ROS infrastructure.
Unfortunately, ROS’s primary development and de-
ployment environment is unix-based and this intro-
duces some difficulties when deploying ROS in non-
unix environments. ROSJava (2015) is a pure Java
implementation of ROS developed for just such a pur-
pose on the Android platform. On iOS there have
66
Codd-Downey R. and Jenkin M..
RCON: Dynamic Mobile Interfaces for Command and Control of ROS-enabled Robots.
DOI: 10.5220/0005540000660073
In Proceedings of the 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2015), pages 66-73
ISBN: 978-989-758-123-6
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

been similar attempts such as ROSPod (2015) which
is still unstable and not a full-featured implementa-
tion. Even with a full underlying ROS infrastructure
to facilitate development on such devices there are a
number of other considerations. Android and iOS de-
vices are limited by available memory capacity, not to
mention processing power, and the overhead of an un-
derlying ROS implementation cuts into available re-
sources. Another consideration is the unreliability of
wireless communication. ROS assumes a high band-
width LAN connection between nodes and the mas-
ter. A user interface that augments the on-robot ROS
environment with user interface-based nodes on the
robot may have a substantive impact on robot per-
formance if communication becomes unstable. With
this in-mind a more prudent approach is to connect
to the ROS environment through other means. The
ROSBridge (Crick et al., 2011) library enables inter-
action with a ROS environment from external pro-
cesses. This interaction is facilitated through com-
mands in the form of JSON (Java Script Object Nota-
tion) strings (Crockford, 2006) . These commands are
mapped to internal ROS functions and enable external
processes to act as a ROS node operating within the
normal ROS environment.
This paper is organized into four major sections;
the first reviews earlier efforts to link external user in-
teraction systems to ROS through ROSBridge. The
second describes the implementation in Objective-C
of a ROSBridge client framework that facilitates com-
munication with ROS. The third describes the imple-
mentation and functions of RCON which acts as an
interface builder on iOS devices. Finally, to illustrate
the effectiveness of the approach a sample UI is con-
structed and tested using an autonomous system.
2 PREVIOUS WORK
This paper outlines two important advancements from
those described in previous works. The first is an iOS
implementation of an ROSBridge client library. The
second is the development of a flexible robot-interface
creation tool that leverages this iOS library to enable
the construction of such user interfaces on the device
itself. This flexibility would not be possible without
the capabilities offered by objective-c objects that en-
ables new class definitions to be created on-the-fly.
In this paper we demonstrate how to leverage the
ROSBridge library to allow for the development of
a native interface on iOS devices to facilitate effec-
tive human-robot interaction. This strategy has been
used effectively in the past by Speers et al. (2013)
to create a ROSBridge client library for Android and
in Codd-Downey et al. (2014) for the Unity3D soft-
ware platform. These libraries can be used to de-
velop customized interfaces that interact with a target
robot. Such predefined interfaces are very effective
on production robotic systems in which user-interface
requirements can be well specified in advance. How-
ever a majority of academic projects are experimen-
tal where the development of a customized interface
can be considered premature. This may also be true
for prototype robots in a commercial setting. Under
these circumstances maintaining a user interface that
keeps in stride with changes in the robot’s architecture
can be costly and time consuming. This motivates the
need for a dynamic interface that can be reconfigured
on the fly based on the needs of the current operator.
Such an interface could be used for other purposes
that may not have been considered cost effective.
3 ROSBRIDGE iOS
FRAMEWORK
ROSBridge (Crick et al., 2011) facilitates communi-
cation between an external application and the ROS
environment. It exposes messages from the ROS en-
vironment to external software using JSON strings,
and allows an external agent to inject messages into
the ROS environment. In essence it allows an exter-
nal application to respond to and influence the ROS
environment without the overhead of a full ROS im-
plementation. The ROSBridge iOS framework lever-
ages this communication protocol to provide an iOS
application access to the ROS environment using na-
tive Objective-C constructs. Translating commands
to and from JSON strings and facilitating communi-
cation with the server is essential to providing a sim-
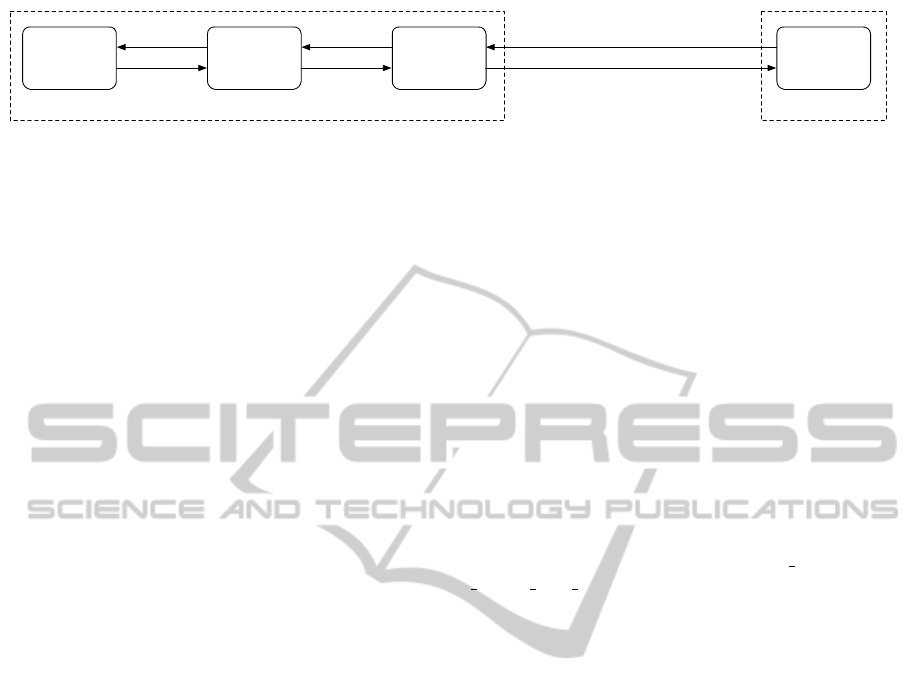
ple and comprehensible framework to developers. An
overview of this communication pathway is depicted
in Fig. 1, which also lists the full set of ROSBridge
commands supported by the iOS framework.
The motivation for choosing iOS as our develop-
ment platform in part is due to the support of na-
tive application development within iOS. This is to
be contrasted with the Android platform where appli-
cations are run within a virtual machine which adds
additional memory and processing overhead. iOS ap-
plications are written in Objective-C which is essen-
tially an object oriented framework built overtop C us-
ing a preprocessor and an extensive runtime environ-
ment. Leveraging this runtime environment, an iOS
application is afforded many of the capabilities avail-
able only to the compiler in many other languages.
These capabilities include but are not limited to; con-
structing and registering new class definitions, attach-
RCON:DynamicMobileInterfacesforCommandandControlofROS-enabledRobots
67
iOS
ROS
ROSBridge
Server
ROSNode Object ROSObject
ROSBridge
Client
JSON
advertise, unadvertise, publish
subscribe, unsubscribe, call_service,
advertise_service, unadvertise_serivce,
service_request, service_response
publish,
service_request, service_response
deserialization
serialization
Figure 1: Overview of the client communication pathway: The ROSBridge class handles all communication from the client
side. All incoming messages are serialized into a instance of a subclass of ROSObject and passed to the corresponding
ROSNode implementation. Outgoing messages and commands are serialized from an instance of a subclass of ROSObject
and compiled into a JSON string and sent to the ROSBridge server.
ing new methods and variables to a class and regis-
tering additional protocol definitions. These capabil-
ities make an excellent fit for the requirements of a
dynamic user-interface framework.
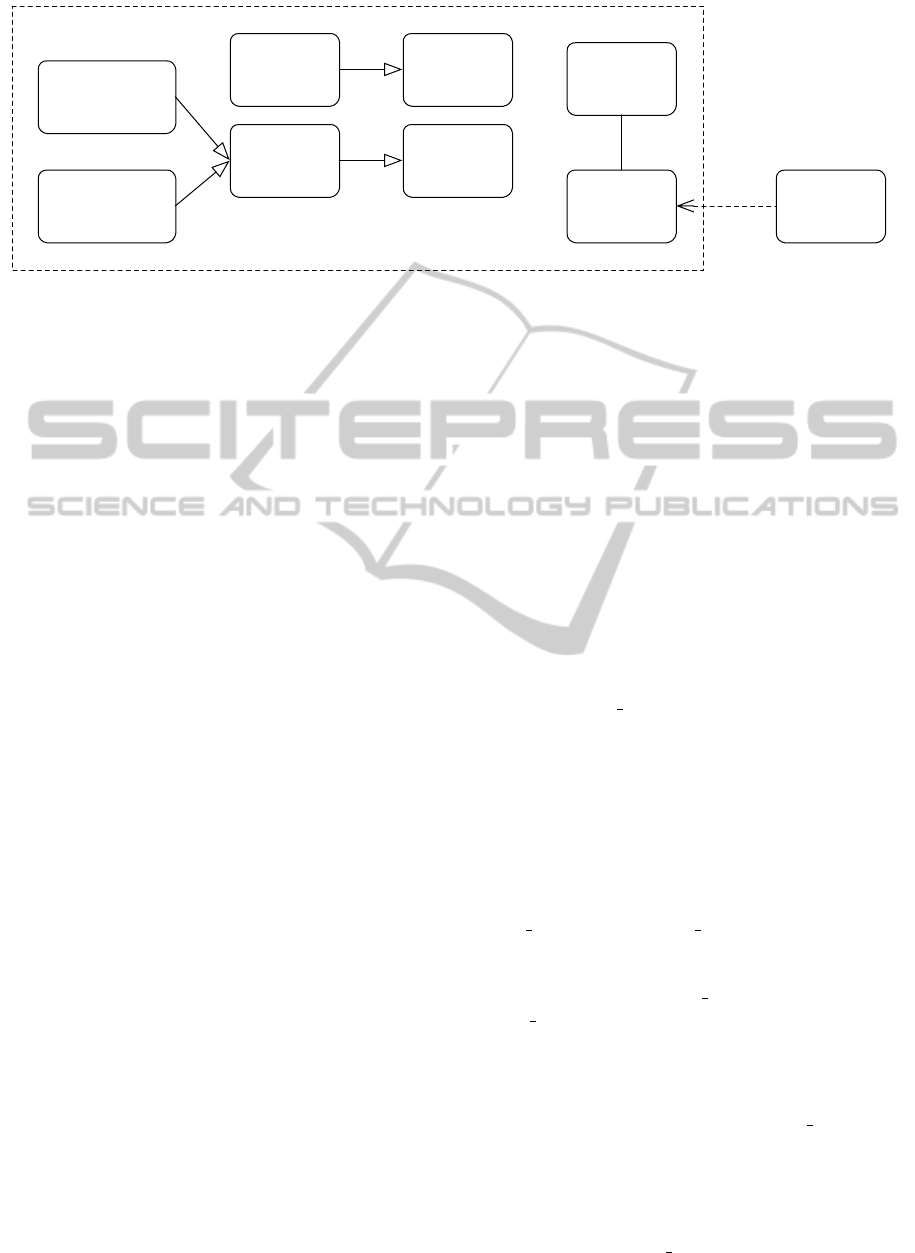
3.1 Client Architecture
The client framework has a layout similar to that of
ROS (see Fig. 2). All processes that communicate
with the ROS environment via the client framework
implement the ROSNode protocol. This facilitates
bi-directional communication between a ROSNode
object and the ROSBridge client framework through
pair objects; a ROSObject, and a ROSInfo object. A
ROSObject carries information that has been dese-
rialized from either a message, response or request
from ROS. The accompanying ROSInfo object con-
tains both a name and a type and is used to identify
the specific topic or service which sent the data con-
tained within the ROSObject object.
ROSNode objects are registered with the main
ROSBridge class whenever they initiate a command
that necessitates a response. Each ROSNode is identi-
fied using a globally unique string (similar to that of a
process and thread identifier within ROS) which aids
message routing. ROSNodes have the ability to use
all functions within ROS’ publisher/subscriber frame-
work and request/response framework. The main
ROSBridge class also provides easy access to the
ROSAPI – the set of service calls provided by the
ROSBridge server – through a set of simple methods
and callbacks.
3.2 Mapping ROS Messages to Classes
Key to developing a user interface that interacts with
ROS is the structure of the relationship between ROS
messages and the software infrastructure within the
user interface itself. Incoming messages could be
dealt with using two different approaches: the first
approach converts JSON strings to their generic ob-
ject counterparts (Dictionary, Array, String, Number),
the second approach converts JSON strings to the in-
stance of a predefined class representing the message.
The benefit of the first approach is that message types
do not have to been known beforehand. Using prede-
fined classes carries the benefit of using literal syntax
and avoiding type casting. Mapping ROS messages
to predefined classes is complicated because a JSON
object does not carry type information. Speers et al.
(2013) solved this problem by requiring all message
classes to be registered with the system, the corre-
sponding class is that which matches the layout of the
JSON Object. In their system new messages cannot
be added at runtime. The flexibility of the Objective-
C runtime allows for both approaches to be taken si-
multaneously. Relying on a standard naming scheme
for message classes (e.g. /turtle1/cmd vel becomes
turtle1 cmd vel) an instance of the class can be cre-
ated at runtime assuming a corresponding definition
has been registered with the runtime environment by
the application executable. If the class is not regis-
tered a new class definition can be generated on the
fly and registered with the runtime environment.
Traditionally Objective-C development required
that a developer actively manage memory within
the language’s reference counting framework. This
meant acquiring/releasing ownership of an object by
manually calling the objects retain/release methods to
increment and decrement the corresponding instance
reference count. In recent years there has been a push
in iOS software towards Automatic Reference Count-
ing (ARC) where the compiler adds these methods
automatically. Including ARC in a project allows a
developer to leave memory management to the com-
piler, which results in more time actively developing
and less memory related bugs. A major caveat in the
use of ARC is that the compiler forbids the use of a
dealloc, retain and release method. This is especially
problematic when constructing new class definitions
at runtime, as not implementing a dealloc method for
new classes results in catastrophic memory leakage.
Fortunately ARC can be disabled on select source
code files, however, best practices would dictate that
files compiled without ARC support be kept to an ab-
solute minimum. In our case all interaction with the
runtime environment is contained within the ROSOb-
ject class.
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
68
ROSBridge iOS Framework
ROSBridge
ROSTopicROSService
ROSObjectROSMessage
ROSServiceRequest
ROSServiceResponse ROSNode
0..*
1
ExampleNode
Figure 2: Overview of the client framework: The ROSBridge class handles all client side communication to and from the
server. All incoming messages are deserialized into ROSMessage objects and passed to the corresponding ROSNode imple-
mentation. Outgoing messages and commands are serialized into JSON strings and sent to the ROSBridge server.
4 RCON
RCON is an iOS application that is inspired by the
ROS tool rViz and aims to provide not only visualiza-
tion features, but command functions as well. RCON
provides a similar look and feel to rViz and enables
a user to construct and use a custom set of interface
elements (widgets) on-the-fly. These widgets have ac-
cess to the full underlying structure of ROS messages
and can display information from a subscribed topic,
create data to publish on a topic, call an advertised
service or generate a response to a service.
RCON treats a set of user configured widgets as
a canvas. These canvases can be created, destroyed
and renamed. Changing from the active canvas to
another canvas automatically stops the operation of
the current set of widgets and starts the operation of
the widgets within the new canvas. Canvases afford
the user with the ability to create different interfaces
for different robots and tasks. A canvas be config-
ured by adding, removing, repositioning and resizing
its widgets. The views shown in Fig. 3 depict the
stages of adding widgets to the currently active can-
vas. The final stage of the widget addition process in-
volves configuring the per-widget settings that affect
its behaviour. For instance, a Stepper Widget requires
a minimum value, maximum value, step value and a
indicator of how often to send updates.
4.1 Available Widgets
Interaction with the ROS environment is facilitated
solely through the use of the predefined widgets. Each
widget has its own set of customizable attributes that
define its behaviour. Additionally, each widget is only
capable of interacting with certain message types or
services. The widgets available with RCON include:
• Button - A button widget is used to call services
and can be configured to call separate services
upon being pressed and released.
• Label - A label widget displays raw data from
a large number of message and primitive types.
(Topic Subscriber only).
• Text Field - A text field widget displays raw data
from a large number of messages and primitive
types, it can also be used to publish data to a topic,
if text is properly formatted.
• Switch - A switch widget can publish or sub-
scribe to a std msg/Bool message or bool primi-
tive types.
• Slider - A slider widget can publish or subscribe
to all standard number messages or types.
• Stepper - A stepper widget is capable of publish-
ing to all standard numerical messages and primi-
tive types.
• Image - An image widget displays data from sen-
sor msgs/Image, sensor msgs/CompressedImage
and is also capable of interpreting and
generating images from other mes-
sages (e.g., sensor msgs/LaserScan and
nav msgs/OccupanyGrid messages).
• Text View - A text view widget displays a large
scrollable text field that remembers previous mes-
sages. Useful as either a publisher/subscribe of
string type messages (including ros graph/Log
messages).
• Map - A map widget displays the world map
showing visual GPS coordinate information and
can be used to both subscribe to and publish on
topics of type sensor msgs/NavSatFix.
RCON:DynamicMobileInterfacesforCommandandControlofROS-enabledRobots
69
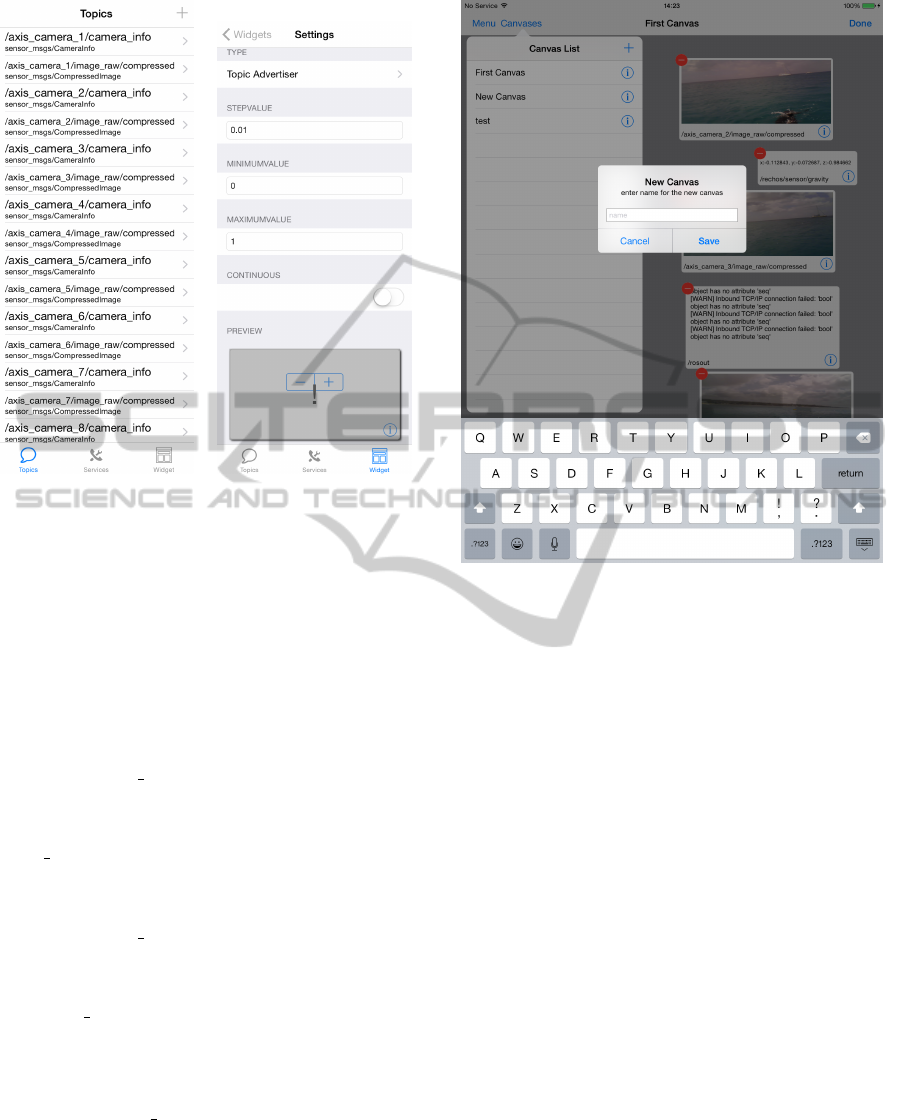
Figure 3: Adding a widget to the current canvas can be initi-
ated through one of three pathways, selecting a target topic,
service or widget. After choosing a topic or service a user
is then displayed a list of compatible widgets. After select-
ing a widget it must then be configured using the widgets
settings panel. This settings panel displays a list of con-
figurable variables that can be used to modify the widgets
behaviour. Here the selected topic or service can be further
altered. When a widget has been properly configured it can
be dragged to the desired location on the canvas.
• Accelerometer - An accelerometer widget dis-
plays data from an accelerometer and publishes
this to a sensor msgs/Imu topic.
• Gyroscope - A gyroscope widget displays data
from a gyroscope and publishes this to a sen-
sor msgs/Imu topic.
• Magnetometer - A magnetometer widget dis-
plays data from a magnetometer and publishes
this to a sensor msgs/Imu topic.
• Camera - A camera widget displays images from
the onboard camera and can publish this image to
a sensor msgs/CompressedImage topic.
• Multi-Touch - A multi-touch widget displays
multitouch interactions from the user and pub-
lishes planar information using a variety of types
within geometry msgs.
• Compound - A compound widget can be con-
figured by grouping together other widgets to
form new messages, requests or responses. Using
this widget message or service types not previous
known to the application can be created.
Figure 4: An interface (canvas) within RCON can be modi-
fied by adding/deleting widget or resizing (via a pinch ges-
ture) or repositioning (via a touch and drag). Canvases can
also be created, renamed and are hot swappable.
These widgets encompass a large percentage of
the standard user interface elements available within
iOS. Their capabilities as widgets stem from their
configurable attributes and visual interface within
iOS. For instance, the Stepper widget is not able to
function as a subscriber because its view (a plus and
a minus button) does not include feedback as to its
current value.
4.2 Use Cases
RCON makes it possible to create any type of user
interface one so desires. However, there is a particular
set of tasks for which RCON is expressly capable, as
described below.
Sensor Monitoring. Monitoring all sensors onboard
a robot can be a daunting task. This is especially true
for large complex robots such as the PR2 and Atlas
robots, where monitoring all of the sensors at once is
effectively impossible. In order to manage this prob-
lem it is common to group sensors either by location
or function. Thus a different group is monitored de-
pending on the current task. However, unexpected be-
haviour on the part of the robot may require that data
from another sensor be accessed to assess the prob-
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
70

lem. In this case a new widget can be added and oth-
ers moved around or resized to make room for the ad-
ditional view.
Using the camera widget an user can also publish
image streams of the robot while in operation. This
enables a user to simultaneously record the actions of
the robot while closely monitoring its sensors, assum-
ing the necessary topics are already being recorded by
the rosbag record utility. Normally this test requires
an additional person with a separate device capable of
recording video or taking pictures.
Motion Controller. One shortcoming of laptop and
netbook based human-robot interaction is their inabil-
ity to capture inertial data. Although motion con-
trollers such as the PlayStation Sixaxis, Dualshock,
etc. can provide this functionality, they add additional
complexity to the process of actually controlling a re-
mote device. Such sensors are typically integrated
within tablet/phone devices and can be easily adopted
to control a robot as demonstrated by Speers and
Jenkin (2013) . Using a compound widget contain-
ing an accelerometer, gyroscope and magnetometer
widgets, within RCON a complete sensor msgs/Imu
message can be compiled and sent to the robot where
this interaction can be carried out. One should be
aware how this model differs slightly from the ap-
proach taken in Speers and Jenkin (2013) . Lacking a
user scriptable engine RCON can’t process and inter-
pret new results. As a result calculations that turn raw
sensor data, into user commands must take place on
board the robot.
Discovery. Most human-robot interaction within an
academic setting takes place between a robot and an
experienced user. Within such a setting the user is
often intimately familiar with the robot and its capa-
bilities. A novice user typically does not have this
acquired knowledge. RCON provides a novice user
with an intuitive tool to quickly discover a robot’s fea-
tures and capabilities. Browsing through the list of
topics reveals onboard sensors. Browsing through the
services reveals the robot’s command structure.
Collaborative Interfaces. Multiple operators can be
connected to a robot simultaneously using RCON on
separate devices. Operators interact with the robot
but also with each other as well. For example, sub-
scribing to the image topic published by another op-
erator’s camera enables one operator to see what
the other sees. A chat room of sorts could be set
up using the TextView widget for viewing messages
and TextView/TextField widget for sending messages.
This facilitates cooperation between operators that are
interacting with the robot under different capacities
(e.g., controlling and monitoring) or those who are
operating separate sensor/mobility systems, or event
Figure 5: After a widget has been fully and properly config-
ured the warning overlay on the preview disappears. This
signifies that the widget is ready to be added to a canvas.
Adding a widget to the current canvas can be done by drag-
ging and dropping the preview to the desired location on the
canvas.
separate multiple robots under a single ROS master
process.
5 EXAMPLE UI CONSTRUCTION
Constructing a new interface for controlling a robot
using RCON is quite simple especially if one is fa-
miliar with the target platform. In this example we
will demonstrate the interface construction process
for a Clearpath
TM
Kingfisher (Fig. 6) that has been
outfitted with additional sensors (camera array and
depth sensor (Codd-Downey et al., 2014b) with in-
tegrated accelerometer). The first step in this pro-
cess is to connect to the rosbridge server running on
the robot. When a connection has succeeded RCON
will display the list of topics and services that are be-
ing advertised by the device. The first interface el-
ement we will create is a multi-touch widget. This
widget will be used to send velocity commands to
the robot in the form of a geometry msgs/Twist mes-
sage. To add this widget to the current canvas se-
lect the touch widget from the widget list panel, this
RCON:DynamicMobileInterfacesforCommandandControlofROS-enabledRobots
71

Figure 6: Overview of the Kingfisher Robotics Platform.
The unmodified platform comes equipped with an IMU, a
GPS antenna, a radio transceiver and differential drive ca-
pability. Additional sensing capabilities have been added to
the platform, these include a panoramic array of camera and
a SONAR depth sensor.
will bring up a settings panel where the widget can
be configured. The touch widget has two basic set-
tings (type and topic), in this case the type should be
set to publisher and the topic set to /cmd vel, when
the widget has been properly configured the preview
shown on the settings panel can be dragged on to the
canvas as depicted in Fig. 5. Next we add two im-
age widgets to the canvas so that live camera data
from the robot can be viewed on screen. To do this
you select the topic which corresponds to the desired
camera feed (sensor msgs/CompressedImage or sen-
sor msgs/Image) from the topics panel. This will dis-
play a prompt asking whether you wish to subscribe
to the topic or publish a message to it. After selecting
subscribe, a list of widgets that can act as subscribers
to the selected topic is displayed, of these widgets we
are interested in the image widget. Adding widgets
via this process sets the type and topic settings so the
preview can be immediately added to the canvas via a
drag and drop gesture. This process can be repeated to
add a second image widget to the canvas as illustrated
in Fig. 7.
When the canvas has been populated with the de-
sired widgets the canvas can be further configured by
repositioning and resizing widgets to achieve the de-
sired layout. The interface constructed in this exam-
ple is shown in Fig. 7. The touch widget that was
added to the canvas can be used to send motion com-
mands to the robot using a pan gesture to illustrate the
desired motion. This simple interface and the process
involved in its construction demonstrates how RCON
can be used to create effective interfaces for interact-
ing with robots.
Figure 7: This example interface consists of two image wid-
gets and a touch widget. The image widgets display live
camera data published by the robot. The touch widget can
be used to send velocity messages to the robot using touch
gestures.
6 DISCUSSION
RCON offers a wide variety of applications in the
field of human-robot interaction. The most obvious
and notable is the ability to create interfaces that can
control and monitor a robot’s activity on-the-fly. This
ability can eliminate the need to devote costly re-
sources into the development of custom user interface
applications. Multiple operators can choose to cus-
tomize an interface specific to their needs, whether
that be the size/placement of certain widgets due to
handedness/preference or the inclusion of additional
widgets for increased awareness.
Robots still in the development stage frequently
require debugging within the field. This process ordi-
narily requires feedback from low-level systems and
accessing this information can be difficult. With
RCON specialized one-off debugging an interface can
be created easily. If a custom look-and-feel is re-
quired later in the production stage the ROSBridge
client library allows such development to progress
without worrying about the underlying communica-
tion between ROS. For instance, much of the screen
real-estate used by RCON could be used for other
purposes, and custom views could facilitate greater
information exchange. This is of particular interest
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
72

to those who wish to develop simultaneously on iOS
and Android, as the AppPortable toolkit can translate
from Objective-C to Java, albeit with minor modifi-
cation using compiler directives. Native Android de-
velopment does not provide this functionality and the
reverse process is not currently available.
At the moment, there is a caveat to proliferating
this technology. ROSBridge does not provide any
form of security to inhibit access to the core ROS en-
vironment. This could result in a nefarious third party
gaining unwanted access to the robot. The most ef-
fective method to prevent against this is to password
protect the wireless network in use by the robot. Ad-
ditionally the port on which the ROSBridge server is
running can be changed from the default port and kept
secret.
ACKNOWLEDGEMENT
The support of NSERC Canada and the NSERC
Canadian Field Robotics Network (NCFRN) is grate-
fully acknowledged.
REFERENCES
Codd-Downey, R., Forooshani, P., Speers, A., Wang, H.,
and Jenkin, M. (2014a). From ROS to unity: Lever-
aging robot and virtual environment middleware for
immersive teleoperation. In IEEE International Con-
ference on Information and Automation (ICIA 2014),
pages 932–936.
Codd-Downey, R., Jenkin, M., and Speers, A. (2014b).
Building a ros node for a nmea depth and tempera-
ture sensor. In Proc. 11th Conf. on Informatics and
Control, Automation and Robotics (ICINCO), Vienna,
Austria.
Crick, C., Jay, G., Osentoski, S., Pitzer, B., and Jenkins,
O. C. (2011). Rosbridge: ROS for non-ROS users. In
Proceedings of the 15th International Symposium on
Robotics Research.
Crockford, D. (2006). Rfc4627: Javascript object notation.
In Fiedler, M., M
¨
oller, S., & Reichl, P.(2012). Quality
of Experience: From User Perception to Instrumental
Metrics (Dagstuhl Seminar 12181). Dagstuhl Reports,
volume 2, pages 1–25.
Httenrauch, H. and Norman, M. (2001). Pocketcero - mo-
bile interfaces for service robots. In In Proceedings of
the Mobile HCI, International Workshop on Human
Computer Interaction with Mobile Devices.
Quigley, M., Conley, K., Gerkey, B., Faust, J., Foote, T.,
Leibs, J., Wheeler, R., and Ng, A. Y. (2009). ROS: an
open-source robot operating system. ICRA workshop
on open source software.
ROSJava (2015). ROSJava - ros wiki. http://wiki.ros.org/
rosjava. Accessed: 2015-02-25.
ROSPod (2015). ROSPod - ros wiki. http://wiki.ros.org/
rospod. Accessed: 2015-02-25.
Speers, A., Forooshani, P. M., Dicke, M., and Jenkin,
M. (2013). Lightweight tablet devices for command
and control of ros-enabled robots. In 16th Inter-
national Conference on Advanced Robotics (ICAR
2013), pages 1–6. IEEE.
Speers, A. and Jenkin, M. (2013). Diver-based control of a
tethered unmanned underwater vehicle. In Proceed-
ings of the 10th International Conference on Infor-
matics in Control, Automation and Robotics (ICINCO
2013), pages 200–206.
Wu, S. and Chen, Y. (2004). Remote robot control us-
ing intelligent hand-held devices. In The Fourth In-
ternational Conference on Computer and Information
Technology, 2004. CIT’04., pages 587–592. IEEE.
RCON:DynamicMobileInterfacesforCommandandControlofROS-enabledRobots
73
