
Contrast-to-Noise based Metric of Denoising Algorithms
for Liver Vein Segmentation
A. Nikonorov
1,2
, A. Kolsanov
3
, M. Petrov
1,2
, Y. Yuzifovich
1
, E. Prilepin
4
and K. Bychenkov
4
1
Samara State Aerospace University, Moskovskoe shosse 34, Samara, Russia
2
Image Processing Systems Institute, Russian Academy of Science, Molodogvardeyskaya st. 151, Samara, Russia
3
Samara State Medical University, Chapaevskaya st. 89, Samara, Russia
4
SmedX, LLC, Moskovskoe shosse 34, Samara, Russia
Keywords: Contrast to Noise Ratio, Total Variance De-noising, Liver, Vessels Segmentation, CUDA, GPGPU, Xeon
Phi, Proximal Algorithms, Fast Marching, Geodesic Active Contours.
Abstract: We analyse CT image denoising when applied to vessel segmentation. Proposed semi-global quality metric
based on the contrast-to-noise ratio allowed us to estimate initial image quality and efficiency of denoising
procedures without prior knowledge about a noise-free image. We show that the total variance filtering in L1
metric provides the best denoising when compared to other well-known denoising procedures such as non-
local means denoising or anisotropic diffusion. Computational complexity of this denoising algorithm is
addressed by comparing its implementation for Intel MIC and for NVIDIA CUDA HPC systems.
1 INTRODUCTION
Liver volumetry is a critical aspect of safe hepatic
surgeries. Precise segmentation of the vessel tree
structure topology can be used in an image-guided
surgery for liver lobes segmentation, tumor detection,
and to reduce incisions and prevent post-operative
bleeding, resulting in less blood loss and rapid patient
recovery. CT image quality varies widely in different
tomograms. Image noise and low contrast between
veins and surrounding tissue make automatic and
semi-automatic intrahepatic blood vessel
segmentation a challenging task.
Radiation dose from clinical CT scanning is an
increasing health concern worldwide (Brenner and
Hall, 2007). The guiding principle in CT scanner
design is to reduce radiation levels as much as
possible while maintaining acceptable diagnostic
accuracy. This results in stronger image noise. Most
noise suppression techniques in CT images can be
broadly categorized as projection space denoising,
image space denoising, and iterative reconstruction
(Li et al., 2014). Denoising is critical for the tasks of
vascular structure segmentation.
Low contrast problem is caused by non-optimal
distribution of the contrast agent during the scan. For
example, in venous phase the agent may still be
present in liver veins while absent in inferior vena
cava. Low contrast in noisy images makes vessel
structures indistinguishable from surrounding tissue.
Differences in CT image quality affects
segmentation results, and new segmentation methods
have been suggested (Shang, 2010). Multiple
methods exist to perform image restoration both at the
scanning and reconstruction stages (Shuman et al.,
2014), and at the image processing stage (Brenner and
Hall, 2007).
Quality measure is important for both image and
segmentation quality evaluation. However, there is no
unambiguous solution to measure image quality in
practical CT segmentation tasks. To use a common
PSNR measure we need to have a noise-free image
available. Contrast-to-noise measures require a ROI
in the image to be selected (Shuman et al., 2014). This
prior knowledge is available only for synthetic tests
or when we already have a “ground truth”
segmentation.
We propose a new contrast-to-noise-based
measure with reduced dependency on the prior
knowledge, and proceed to use this measure to test
different denoising algorithms applied to vessel
segmentation. Incremental vessel segmentation
technique is based on fast marching and level-set
algorithms.
Total variance in L1 distance (Chambolle and
Pock, 2011) shows the best denoising quality. To
make this computational-intensive method practical,
59
Nikonorov A., Kolsanov A., Petrov M., Yuzifovich Y., Prilepin E. and Bychenkov K..
Contrast-to-Noise based Metric of Denoising Algorithms for Liver Vein Segmentation.
DOI: 10.5220/0005542400590067
In Proceedings of the 12th International Conference on Signal Processing and Multimedia Applications (SIGMAP-2015), pages 59-67
ISBN: 978-989-758-118-2
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

we implemented this denoising procedure using two
“desktop supercomputing” methods: GPGPU using
NVIDIA CUDA and MIC (Many Integrated Core)
using Intel Xeon Phi.
2 ONE POINT
CONTRAST-TO-NOISE RATIO
AS A QUALITY MEASURE
Most of quality measures developed for signal and
image processing, such as PSNR and method noise
(Buades, Coll and Morel, 2006), require prior
knowledge about a noise-free image. For example,
CT reconstruction quality for different radiation dose
is investigated using phantom images (Shuman et al.,
2014), (Hendrick, 2008). These metrics measure
different aspects of image quality: PSNR describes
degradation of the best signal, while method noise
measures image edge corruption by denoising
procedures. The most important image quality aspect
for vessel segmentation is a contrast between vessels
and noisy surrounding tissue.
According to (Hendrick, 2008), contrast-to-noise
ratio (CNR) is defined as the ratio of signal difference
(contrast) to the noise level in the image:
,
object background
MM
CNR
σ
−
=
(1)
where
object
M
and
background
M
are average intensities
of the object and its background,
σ
is standard
deviation of the image noise.
Details of CNR estimation vary across different
works. Usually, it is necessary to choose one ROI on
the object and one – on the background to compute
object
M
and
background
M
(Shuman et al., 2014),
(Magnotta and Friedman, 2006). However, it is
possible to get incorrect CNR estimation on non-
uniform image parts (Mori et al., 2013).
In (Nikonorov et al., 2014), Sliver7 (Heimann et
al., 2009) training database was used to estimate
denoising quality. The training set contains
segmented livers and these segmentations are used to
estimate
object
M
in (1) and an outside image part is
used for
background
M
estimation. Unfortunately, this
prior knowledge is not available for segmentation
tasks found in many preoperative planning situations.
We will use the following image model to
estimate CNR on real CT data. We assume that the
image consists of only two components: a vessel of a
certain unknown diameter that we need to estimate,
and surrounding tissue. This enables us to apply
bimodal intensity distribution hypothesis at any local
neighborhood.
We used two approaches for CNR-like measure
computation. In the simple two-point method we use
one point inside and one outside of the vessel object
to be segmented. Similar to ROI selection in (Shuman
et al., 2014), a two-point CNR has the following
form:
2
1,2,3
(, ) (, )
(, ) ,
(, )
(, )
p( ), : , ,
,
,maxxx
obj obj bkg bkg
obj bkg
bkg bkg
obj obj
obj obj
obj obj
ii
i
MRMR
q
R
MR
R
M
σ
∞
=
−
=
=
≤
=
=−
xx
xx
x
x
xxx x
xx
(2)
where
obj
x и
bkg
x are points at the vessel and
surrounding tissue,
x, 1,2,3
i
i =
is
i
-th component
of
x ,
p
()x is an intensity value at the point x , M is
an intensity median over a cubic neighborhood,
obj
R
is the size of the cubic neighborhood on the vessel
(object),
bkg
R – on the surrounding tissues
(background),
(, )
bkg bkg
MRx
is defined the same way
as
(, )
obj obj
MRx
,
(, )
bkg bkg
R
σ
x
is standard deviation
across the same region as
bkg
M
,
,
∞
is L
∞
or
Chebyshev distance.
Computation of
obj
R could be done assuming
unimodality of the intensity distribution in the cubic
image patch centered in
obj
x . Follow (Basu and Das-
Gupta, 1992) if the distribution is unimodal then
3/5,
obj obj
obj
Mm
σ
−
≤
(3)
3,
obj obj
obj
M
μ
σ
−
≤
(4)
where
obj
m
is mean estimation and
obj
μ
mode
estimation over the image cubic neighborhood
centered in
obj
x .
With
obj
R increasing above a threshold, the
distribution loses its unimodality and inequalities (3)
and (4) fails.
To separate the object from the background the
value of (2) must be greater than 1, with a value of 2
being a better threshold for stable separation of the
vessel from its surroundings. These values are
obtained in the experiments, described in section 6.
Values of (2) vary along with the point on the
background selection. A low value for (2) means that
the segmentation quality will be subpar, but if we get
SIGMAP2015-InternationalConferenceonSignalProcessingandMultimediaApplications
60

good value then it does not follow that quality will be
high. It would only mean that we have not found a
bad case, yet. Therefore, the value of metric (2) is
necessary but not sufficient for good vessels
separation from background.
We propose a semi-global method for CNR-like
measure estimation using only one point inside the
object. We use a cubic neighborhood of the point
x
obj
defined using
L
∞
as done in (2):
{
}
:, .
obj
D
DR
∞
=≤xx x
(5)
The distribution inside the cube is unimodal. The
tissue surrounding this cube has different intensity
distribution and thus overall distribution becomes
bimodal, so inequalities (3), (4) fail and take the
following form:
3/5
bkg obj
obj
Mm
σ
−
>
,
(6)
3
bkg obj
obj
M
μ
σ
−
>
.
(7)
At least one of (6), (7) must be true if the distribution
isn’t unimodal. We can estimate the median over the
set of cubic patches centered in
k
x
and having the
size
bkg
R
, all the patches placed in the neighborhood
D of the
obj
x
point:
{}
p( ) : ,
()
,
kbkg
bkg obj
kk
obj k
R
MM
D
∞
∞
≤
=
≤
xxx
x
xx
(8)
The
{
}
k
M
set includes only patches with either (6)
or (7) to be true, so it is an estimation of the
background intensity median. The standard deviation
for these patches is estimated as follows:
{}
p( ) : ,
()
,
kbkg
bkg obj
kk
obj k
R
D
σσ
∞
∞
≤
=
≤
xxx
x
xx
(9)
Finally, we estimate median and standard deviation
as modes of (8) and (9). So, semi-global CNR-like
measure takes the following form:
1
()mode( ())
()
(mode( ( )) ) / 2
obj bkg obj
obj
k
bkg obj obj
k
MM
q
σσ
−
=
+
xx
x
x
.
(10)
The variance of the noise often depends on the signal
intensity, with the object and the background
producing different estimates for the variance. As a
result, it is not clear which variance must be used in
the denominator of the measure (1). To address this
problem, we use a half sum of the object and
background variances in the denominator of the
proposed one-point contrast-to-noise measure (10) as
a compromise.
3 VESSELS SEGMENTATION
TECHNIQUE
We applied Level Sets approach to segment vessels.
Semi-automatic segmentation is performed in two
steps. At the first “interactive initialization” step, Fast
Marching Upwind Gradient method is used for the
rough segmentation of vascular structures. At the
second “precise segmentation” step, Geodesic Active
Contours method is used for the final segmentation of
vascular structures. The algorithm is shown in Fig. 1
(Antiga, 2002), (Caselles, Kimmel, and Sapiro,
1997).
At the first step, seed points and optional target
points are specified inside the vessel to be segmented.
Seed points indicate the start of the wave front
propagation in the Fast Marching algorithm.
The wave propagation stops when one of the
specified target points is reached. The wave front
propagation is determined by a speed image. The
original image has been used as a speed image after
applying a threshold.
At the second step, we use Geodesic Active
Contour method to refine segmentation. This method
requires two inputs: The Fast Marching result as the
initial level set, and the feature image. We use the
gradient magnitude of the original image with the
transformation of the nonlinear function (Sigmoid
filter) as the edge potential map.
The level-set algorithm produces a real-valued
image. The binary image, obtained by applying a
threshold, is the final segmentation result.
We also used a restricted segmentation region
defined by a binary image of an organ or an organ
region to improve segmentation speed and increase
segmentation precision.
We used stepwise incremental approach to
segment the whole vascular tree when it was
impossible to perform vascular tree segmentation at
once. Each step implies the segmentation of a certain
vessel subtree. The final binary image obtained at
each step is combined with the final binary images
achieved at previous steps.
To improve segmentation quality in low-contrast
situations, the original image has been smoothed by
Gaussian filter to prevent the leak into the region rich
in blood vessels represented as less than one pixel
diameter on low-contrast CT data.
Contrast-to-NoisebasedMetricofDenoisingAlgorithmsforLiverVeinSegmentation
61
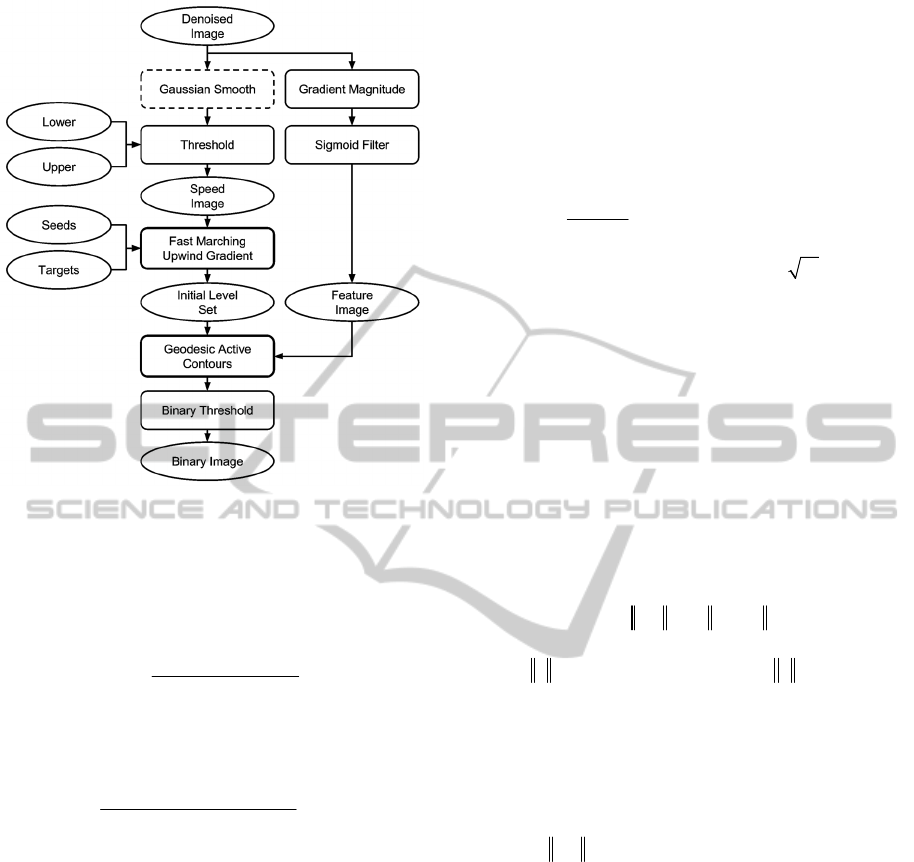
Figure 1: Incremental segmentation algorithm.
The main parameter of the algorithm is a
threshold between vessels and surrounding tissues.
We automatically estimate its value by using a
Mahalanobis-like procedure:
()
,
obj bkg bkg
bkg
bkg obj
MM
TM
σ
σσ
−
=+
+
(11)
and using measure (10):
1
mode( ( ))
()mode( ())
,
2
bkg obj
k
obj bkg obj
k
TM
q
=+
σ
+
x
xx
(12)
where
T
is a threshold value, and
()
1
obj
qx
is defined
by (10).
4 DENOISING PROCEDURES
We compared four denoising techniques applied to
vessel segmentation: curvature anisotropic diffusion,
bilateral filtering, non-local-means filter, and total
variance based denoising in
2
L
and
1
L
.
We will briefly describe these methods using the
following notation. Let us denote a noisy source
image as
0
()x
p
, while the target filtered image as
*
()x
p
.
The downside of image denoising (smoothing) is
that it blurs sharp boundaries used to distinguish
anatomical structures, such as vessels. Perona and
Malik (1990) introduced an alternative to linear-
filtering called anisotropic diffusion. The motivation
for anisotropic diffusion (also called nonuniform or
variable conductance diffusion) is that a Gaussian
smoothed image is a single time slice of the solution
to the heat equation that has the original image as its
initial conditions. Thus, the solution to
(,)
(,)
gt
gt
t
∂
=∇⋅∇
∂
x
x
,
(13)
where ( , 0) ( )
g
=xpx is
(,) G( 2) ()gt t p=⊗xx
,
and G( )
σ
is a Gaussian kernel with standard
deviation
σ
. Anisotropic diffusion includes a
variable conductance term which in turn depends on
the differential structure of the image. Thus, the
variable conductance can be formulated to limit edge
smoothing in images, as measured by a high gradient
magnitude, for example. In our work, we use
curvature anisotropic diffusion modification,
described in (Shang, 2010) and implemented in ITK
(Johnson et al., 2013).
Total variation model was invented by Rudin,
Osher, Fatemi (1992). This model is based on
minimization of the following functional
*
0
12
arg min
λ
=∇+−
p
pppp
,
(14)
where
1
is the robust
1
L
norm,
2
is the
2
L
norm used in the least-squares restoration model,
0
p
is the source noisy image,
*
p
is the target filtered
image and
λ
is the weighting parameter, which
defines the trade-off between regularization and data
fitting. The
1
L
norm of the image gradient is total
variation
1
∇p
. This filtering is capable of denoising
images without blurring edges. We use
implementation of total variance filtering based on
(Chambolle and Pock, 2011). We will refer to it as
TV L2 de-noising.
An alternative denoising technique, based on non-
local-mean approach proposed in (Buades, Coll and
Morel, 2006), involves averaging over pixels similar
in intensity but distant in spatial domain. It is
therefore necessary to scan a vast portion of the image
in search of all the pixels that resemble the pixel to
denoise because the image can have periodic textured
patterns, or the elongated edges. Denoising is then
done by computing the average color of these most
resembling pixels. The resemblance is evaluated by
comparing a whole window around each pixel. This
new filter is called non-local means and is computed
as follows:
SIGMAP2015-InternationalConferenceonSignalProcessingandMultimediaApplications
62

1
1
() (,) ()
()
pwp
C
=
y
xxyy
x
.
(15)
The family of weights
(, )w xy depends on the
similarity between the pixels
x and
y
, ()C x is a
weighting constant:
2
2,
(N( ), (N( ))
(, ) exp
pp
w
h
α
=−
xy
xy
,
(16)
where
N
()x denotes a square neighborhood of a
fixed size and centered around a pixel
x .
Another filtering method we test is a bilateral or
Yaroslavsky filter, which we use from ITK package
(Johnson et al., 2013).
This approach was previously compared to the
anisotropic diffusion and total variance filtering in
(Buades, Coll and Morel, 2006) using method noise
measure and comparing visual quality. The main idea
of the method noise measure is to estimate how a
denoising algorithm alters structures found in the
image.
We developed optimization method to de-noise
3D CT data based on the optimal first-order primal-
dual framework by Chambolle and Pock (2011). It is
a total variance minimization based on
1
L
norm, we
will call this method TV L1 denoising.
Let X and Y be the finite-dimensional real vector
spaces for the primal and dual space, respectively.
Consider the following operators and functions:
:X Y→K
is a linear operator from X to Y;
:X [0, )→+∞G is a proper, convex, (l.s.c.)
function;
:Y [0, )→+∞F is a proper, convex, (l.s.c.)
function;
where l.s.c. stands for lower-semi-continuous.
The optimization framework (Chambolle and
Pock, 2011) considers general problems in the
following form:
ˆ
arg min ( ( )) ( ).=+
x
xFKxGx
(17)
To solve this problem, the following algorithm is
described in the paper (Chambolle and Pock, 2011).
During initialization,
, R
τσ
∈
+
are set,
[0,1]
θ
∈
,
00
(, )XY∈×xy
is some initial approximation,
00
=xx. For 3D CT data, the final result obtained on
the previous slice is used as the initial approximation
for the next slice. With
0n ≥
as the current step
number, values of the
,,
nnn
x
y
x are iteratively
updated as follows:
1*
()
nFnn
prox
σ
σ
+
=+yyKx,
(18)
*
11
()
nnn
prox
τ
τ
++
=+
G
xxKy
,
(19)
11 1
()
nn nn
θ
++ +
=+ −xx xx.
(20)
The proximal operator with respect to G in (19), is
defined as:
1
2
2
() ( ) ()
1
arg min ( ),
2
prox
τ
τ
τ
−
=+∂ =
=−+
G
x
xEGx
xx Gx
(21)
where E is an identity matrix. The proximal operator
(18) is defined in a similar way.
The model of denoising is based on the total
variance approach (Chambolle and Pock, 2011) and
is described by the following functional:
*
0
11
min
λ
=∇+ −
p
pppp,
(22)
where
1
is the robust
1
L
norm,
0
p is the source
noisy image,
*
p
is the target filtered image and
λ
is
the weighting parameter, which defines the tradeoff
between regularization and data fitting.
In order to apply the described algorithm to (22),
we follow the (Chambolle and Pock, 2011):
1
()G =∇
pp
,
(23)
*
0
1
()F =−
ppp
.
(24)
Finally, proximal operators for steps (18) and (19)
of the algorithm can be obtained using (23) and (24).
Please refer to (Chambolle and Pock, 2011) for
further details. The denoising algorithm based on
total variance can preserve sharp edges. Also, the use
of
1
L
makes it possible to efficiently remove strong
outliers.
5 HIGH PERFORMANCE
IMPLEMENTATION OF
DENOISING ALGORITHM
As can be seen in the results of our experiments in the
following Section 6, TV L1 denoising algorithm
proved to be the best for low-contrast CT data, but it
is the most computationally expensive one. This is
why we implemented it for two many-core systems,
Xeon Phi and CUDA. The work (Pock et al., 2008)
addressed CUDA implementation of TV L1
algorithms, but did not provide details.
A general algorithm is shown in Fig. 2. The
implementation is based on (11)-(13). Expressions
(11)-(12) describe the dual part of the iteration of the
Contrast-to-NoisebasedMetricofDenoisingAlgorithmsforLiverVeinSegmentation
63
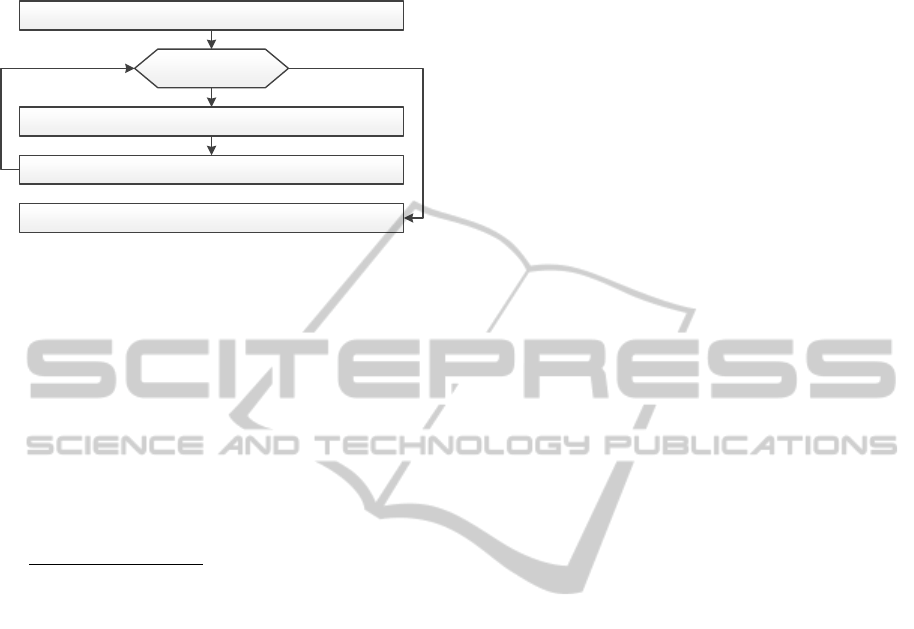
proximal algorithm, UpdateDual(), and (13)
describes the primal part UpdatePrimal().
Figure 2: General algorithm of TV L1 filtering.
TV L1 is based on proximal algorithms, these
algorithms have large dimensionality but they are
separable, as it was shown in (Parikh and Boyd,
2013). This property enables efficient parallel
implementation.
Each iteration of the computation is divided into
two stages: UpdateDual() and UpdatePrimal(). Inside
these stages we have a vector-like processing of the
arrays with a size of about 2
18
. However, these two
stages are sequential and require synchronization
between them at each iteration.
GPU implementation. Intensive memory use of
TV L1 algorithm represents a challenge for GPU
implementation. The size of the shared memory is a
major constraint of the GPU, which can be expressed
as follows:
max
max
max
max max
,
,
,
/,
MP MP S MP
Th per MP MP B Th per MP
MP MP
opt
B Th per MP MP
SNNS
NNNN
NN
NN N
=⋅≤
=⋅≤
≤
=
(25)
where
M
P
S amount of available shared memory per
MP in bytes,
M
P
N - a number of blocks per MP,
S
N
necessary amount of shared memory per block,
max
M
P
S
– maximum amount of shared memory per MP in
bytes,
Th per MP
N
- a number of simultaneous threads
per MP,
B
N - a number of threads per block,
max
Th per MP
N
- maximum amount of threads per MP,
max
M
P
N
- a number of blocks per MP,
opt
B
N
- an optimal
block size in bytes.
In our case,
(1)
SB type
NN S=+⋅
, where
type
S
is
the size of pixel in bytes. So, the amount of shared
memory per multiprocessor is:
max
(1)
M
PMPB typeMP
SNN SS=⋅+⋅≤
.
(26)
For both tested GPU platforms we use
max
16
MP
N =
,
max
2048
Th per MP
N =
,
max
49152
MP
S =
, so,
128
opt
B
N =
threads per block. Finally, 8256
MP
S =
bytes for single precision and
16512
MP
S = bytes for
double precision, which is lower than
max
M
P
S
.
We use two CUDA kernel calls for each iteration.
The first kernel call implements UpdateDual(), the
second – UpdatePrimal(). There is global memory
exchange between these two kernel calls, that is why
we do not have any overhead caused by shared
memory invalidation between the kernel calls.
Many-core Xeon Phi implementation is an
alternative to CUDA. We use OpenMP for both
multicore CPU and Xeon Phi implementation. For
Xeon Phi we used non-shared memory offload model.
We use
omp parallel for private pragmas for the
CPU version. All intermediate variables are made
private. Synchronization by
omp barrier pragmas is
made after UpdateDual() and UpdatePrimal(), at
the
same places as in the CPU version. Private variables
are also the same as in the CPU version.
Main algorithm iteration loop and all inner loops
are made on the coprocessors side. Parallelization of
the for-loops is made by
omp parallel for simd private
pragma. The
simd modifier allows efficient utilization
of the Xeon Phi vectorized architecture. We bind
OpenMP threads to physical processing units by
setting environment variables KMP_AFFINITY to
"balanced,granularity=fine" and
KMP_PLACE_THREADS to "59C,4T".
We use one CT slice to test performance, with 600
iterations. The slice is 16-bit image of the 512х512
size. Testing equipment: Intel Xeon E5-2695 v2, Intel
Core i7 4770K at 4.2 GHz, Intel Xeon Phi 5110P,
NVIDIA Tesla K20m, NVIDIA GTX770 4096 MB.
In the offload model one core of Xeon Phi is reserved
for system need, which leaves us with 236 threads out
of 240 available at Xeon Phi. Results are shown in
Fig. 3.
As shown in Fig. 3, NVIDIA Tesla slightly
outperforms Intel Xeon Phi, with both systems about
10 times faster than a CPU-based version, and only
slightly faster than an implementation based on an
inexpensive GTX 770 GPU. A major advantage of
Xeon Phi is its capability to run the same OpenMP
implementation as a CPU-based version, which
makes Xeon Phi a better option for rapid prototyping
of computationally-expensive algorithms. GPGPU
approach is optimal for production use, when the cost
and power consumption are more important
considerations. With a typical CT that has about 200
slices, the data could be filtered by a GTX 770-based
system in about 3.3 seconds, which is acceptable for
UpdatePrimal(): <in: p; out: head_u; inout: u>
Writing filtered image
UpdateDual(): <in: head_u; out: p>
Reading image: <u = imageIn, head_u = u, p = zeros()>
i = 0:iterCount
SIGMAP2015-InternationalConferenceonSignalProcessingandMultimediaApplications
64
production use. Peak memory usage is one gigabyte
for single precision and two gigabytes for double
precision. Neither GPU nor Xeon Phi architectures
limit the memory needed by slice-by-slice processing.
A similar workflow for large color image filtering
was proposed in (Nikonorov, Bibikov and Fursov,
2010).
Figure 3: Computation time for different systems.
6 RESULTS AND DISCUSSION
We tested our algorithm on 20 CT images from Sliver
7 database and on 8 of our own CT images and used
proposed metric and visual quality analysis. We also
used 10 CT scans of the abdomen from a publicly
available database (IRCAD) in our evaluation of the
proposed one-point CNR measure (10).
The implementations of bilateral filter and
curvature anisotropic diffusion filter can be found in
ITK library (Johnson et al., 2013). The following
parameters were used for bilateral filter: domain
sigma of 7, range sigma of 7; and for curvature
anisotropic diffusion (Johnson et al., 2013): time step
of 0.09, 8 iterations and a conductance value of 3.0.
The total variance filters have
[0.2,0.4]
λ
∈
.
We tested different denoising techniques on the
CT images from (IRCAD) database. All images in
this database have a good contrast. However, good
quality venous segmentations are only possible after
a denoising step.
For our evaluation, we used the following
algorithm. We apply different denoising procedures
with TV L1, TV L2 and non-local-means filtering.
Then we compute one-point CNR measure and
perform segmentation. We compared our
segmentation with the ground truth and compute
volume overlap error – VOE (Heimann et al., 2009).
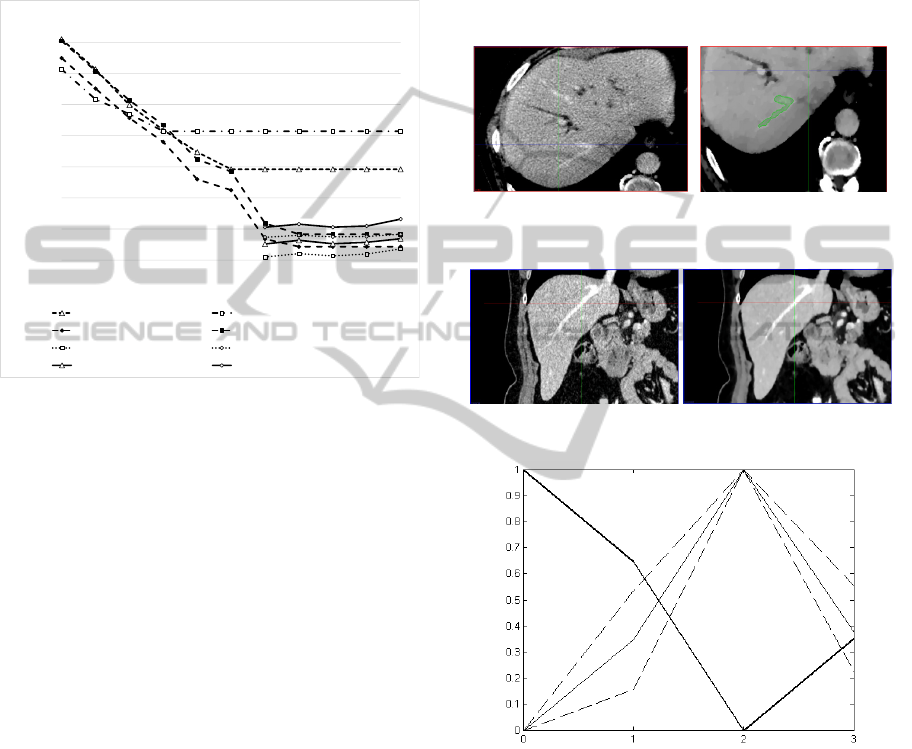
For different CT images the value of one-point
CNR (10) varies, with values typically between 2 and
5. VOE is usually between 5% and 18%. To make
these values comparable across different images, we
apply normalization to CNR and VOE values. Plots
of normalized VOE and CNR with its 90%
confidence interval values are shown in Fig. 6.
Figure 4: Low quality CT, TV L2 denoising, TV L1
denoising.
Figure 5: High quality CT and its TV L2 denoising.
Figure 6: Normalized VOE (bold), mean normalized value
of measure (10) (regular) and its 90% CI (dashed) for
different denoising parameters applied to 10 CT images.
In Fig. 4 low-contrast CT is shown, the quality
measure (10) for this image is 1.45. The result of TV
L1 denoising has the quality measure of 3.24, for TV
L2 denoising – 2.83. As shown in Fig. 4, the visual
quality for TV L1 is also better. This denoised image
allows us to segment a portion of the hepatic vein
(central-bottom part of the Fig. 4). This branch of
hepatic vein could not be separated otherwise. Only
TV L1 filtering made it possible to perform a
complete segmentation of hepatic veins in this CT
64
128
256
512
1024
2048
4096
8192
1 2 4 7 16 23 128 236 256 512 1024
Calculation time, milliseconds
Number of threads
Calculation time on different devices
Xeon E5-2695 v2, SP & DP i7 4770K, SP & DP
Xeon Phi 5110P, SP Xeon Phi 5110P, DP
Tesla K20m, SP Tesla K20m, DP
GTX770, SP GTX770, DP
Contrast-to-NoisebasedMetricofDenoisingAlgorithmsforLiverVeinSegmentation
65

data using previously described segmentation
technique.
A low-contrast example is compared to a high-
contrast one shown in Fig. 5. Quality measure for this
image is 2.81, the quality increased to 8.62 after
denoising.
Quality measure values for bilateral filtering and
curvature diffusion are lower than results obtained
with non-local-means filter and total variance
denoising. Sample results obtained on two low-
contrast CT images (with a quality lower than 2) and
on two CT images with normal contrast are shown in
table 1.
Table 1: Image quality measure for denoising.
Image type
Image number/Quality measure (10)
Image
#21
Image
#3
Image
#5
Image
#22
Noisy image 1.45 1.86 2.81 2.27
Bilateral
filtering
2.11 2.13 5.83 3.12
Curvature
diffusion
1.87 2.45 6.17 2.87
Non-local-
means
2.30 2.67 8.89 4.13
TV L2 2.83 2.44 8.62 3.78
TV L1 3.23 2.94 8.17 3.65
These results allow us to make the following
conclusions. First, proposed one-point contrast-to-
noise based CT image quality measure helps to
predict the quality of the segmentation and allows
detection of the low-contrast CT data. It is also a
useful in choosing the best denoising procedure and
its parameters for individual CT scans.
Second, for CT images with good contrast and a
quality measure higher than 2.0, results for total
variance algorithm using
1
L
and
2
L
norms and non-
local-means are close. Non-local-means produce a
slightly better denoising results, which is similar to
the findings in (Buades, Coll and Morel, 2006).
Third, TV
1
L
denoising shows significantly
better results for low-contrast images. While these
low quality images represent only 20% of our data
set, only TV
1
L
filtering makes whole venous
segmentation technique from section 4 possible.
As shown in section 5, HPC implementation
reduces the time of the TV
1
L
denoising procedure
while maintains its effectiveness. It makes this
denoising method the best practical choice for
preprocessing low-contrast CT data with quality
measure (10) lower than 2.0.
The results achieved with an HPC-based
implementation of TV L1 algorithm opens new
opportunities in exploring computationally intensive
hepatic segmentation algorithms, as well as other
aspects of image-guided surgery such as non-rigid
registration and real-time tracking. This will be
explored in subsequent research.
Improvement to the segmentation technique for
low contrast images is another interesting area to
explore. The challenge here is that the image requires
different threshold values in various areas of the CT.
Incorporating threshold prediction in the wave
propagation process during the first step of the
segmentation could be a promising direction. An
HPC implementation of the geodesic active contour
segmentation step could further reduce segmentation
processing time.
REFERENCES
Antiga, L., 2002. Patient-Specific Modeling of Geometry
and Blood Flow in Large Arteries, Ph.D. Thesis.
Basu, S., Das-Gupta A., 1992. The Mean, median and Mode
of Unimodal Distributions: A Characterization, Tech.
report, 21 p.
Brenner, D. J., and Hall, E. J., 2007. Computed
tomography: An increasing source of radiation
exposure. The New England Journal of Medicine, vol.
357, no. 22, pp. 2277–2284.
Buades, A., Coll, B., and Morel, J.M., 2006. A review of
image denoising methods, with a new one. Multiscale
Modeling and Simulation, vol. 4, no. 2, pp. 490-530.
Caselles, V., Kimmel, R., and Sapiro, G., 1997. Geodesic
Active Contours. International Journal on Computer
Vision, vol. 22, no. 1, pp. 61-97.
Chambolle, A., and Pock, T., 2011. A first-order primal-
dual algorithm for convex problems with applications
to imaging. Journal of Mathematical Imaging and
Vision, vol. 40, pp. 120–145.
Heimann, T., et al., 2009. Comparison and Evaluation of
Methods for Liver Segmentation from CT datasets.
IEEE Transactions on Medical Imaging, vol. 28, no. 8,
pp. 1251-1265.
Hendrick, R. E., 2008. Breast MRI. Fundamentals and
Technical Aspects, Springer New York, 254p.
IRCAD, 3DIRCADb team, 3D-IRCADb-01 database,
http://www.ircad.fr/softwares/3Dircadb/ 3Dircadb1/
index.php?lng=en.
Johnson, H. J., et al., 2013. The ITK Software Guide, Third
Edition, 768p.
Li, Z., et al., 2014. Adaptive nonlocal means filtering based
on local noise level for CT denoising. Medical physics,
vol. 41, no. 1, p. 011908.
Magnotta, V. A., and Friedman, L., 2006. Measurement of
Signal-to-Noise and Contrast-to-Noise in the fBIRN
SIGMAP2015-InternationalConferenceonSignalProcessingandMultimediaApplications
66

Multicenter Imaging Study. Journal of Digital Imaging,
vol. 19, no. 2, pp. 140-147.
Mori, M., et al., 2013. Method of Measuring Contrast-to-
Noise Ratio (CNR) in Nonuniform Image Area in
Digital Radiography. Electronics and Communications
in Japan, vol. 96, no. 7, pp. 32-41.
Nikonorov A., Bibikov S. and Fursov V., 2010. Desktop
supercomputing technology for shadow correction of
color images. Proceedings of the 2010 International
Conference on Signal Processing and Multimedia
Applications (SIGMAP), pp. 124-140.
Nikonorov, A., et al., 2014. Semi-Automatic Liver
Segmentation Using Tv-L1 Denoising and Region
Growing With Constraints. 9th German-Russian
Workshop on Image Understanding, pp. 1-4.
Parikh, N., and Boyd, S., 2013. Proximal Algorithms.
Foundations and Trends in Optimization, vol. 1, no. 3,
pp. 123–231.
Perona, P., and Malik, J., 1990. Scale space and edge
detection using anisotropic diffusion, IEEE
Transactions on Pattern Analysis and Machine
Intelligence, vol. 12, no. 7, pp. 629–639.
Pock, T., et al., 2008. Fast and Exact Solution of Total
Variation Models on the GPU, Computer Vision and
Pattern Recognition Workshops, 2008. CVPRW'08.
IEEE Computer Society Conference on, pp. 1-8.
Rudin, L., Osher, S. J., and Fatemi, E., 1992. Nonlinear total
variation based noise removal algorithms. Physica D:
Nonlinear Phenomena, vol. 60, pp.259-268.
Shang, Q., 2010. Separation and Segmentation Of The
Hepatic Vasculature In CT Images, Nashville,
Tennessee, 113 p.
Shuman, W. P., et al., 2014. Standard and Reduced
Radiation Dose Liver CT Images: Adaptive Statistical
Iterative Reconstruction versus Model-based Iterative
Reconstruction—Comparison of Findings and Image
Quality. Radiology, vol. 273, no. 3, pp. 793-800.
Contrast-to-NoisebasedMetricofDenoisingAlgorithmsforLiverVeinSegmentation
67
