
Human-like Humanoid Robot Posture Control
M. Zebenay, V. Lippi and T. Mergener
Neurologische Klinik, Neurozentrum, University of Freiburg, Breisacher Straße 64, Freiburg, Germany
Keywords:
Disturbance Estimation Control, Human-like, Double Inverted Pendulum.
Abstract:
This paper validates experimentally a humanoid posture control concept from neuroscience, called disturbance
estimation and compensation, DEC concept. The DEC control system, different from typical state estimation
systems, is not including a dynamic model of the body. Also, among human posture control models it is
particular in that it uses feedback of multisensory disturbance estimates for compensation, rather than ’raw’
sensory signals. To this end, the system performs fusions of sensory inputs such as vestibular inputs (IMU)
and proprioceptive inputs (joint position and speed). The compensation of external disturbances allows the
control to use low loop gain, with human-like tolerance of time delays and mechanical compliance. This
paper validates the control concept experimentally, measuring the balancing of biped stance of a humanoid 2
DOF robot, Posturob II, while superimposing on support surface tilt either voluntary trunk bending or push
stimuli. The results show that the control concept is robust and able to stabilize the robot’s balance in complex
disturbance conditions. Furthermore, several human-like features such as hip-ankle coordination emerged
from the control concept.
1 INTRODUCTION
Humanoid robots require bipedal balancing in many
tasks such as walking, which is different from tradi-
tional industrial robots that are fixed to the support,
not requiring mobility to perform their tasks. Cur-
rently, humans are still superior to robots with re-
gard to robustness and versatility in the control of
bipedal balancing (Nori et al., 2014). Human-likeness
of bipedal control is nowadays an important research
topic (Torricelli et al., 2014). Humanoid balancing
is often based on the zero moment point control or
related measures, which try to keep the center of
pressure within the base of support under the feet
(Goswami, 1999). For this purpose, robots are of-
ten equipped with torque sensors or contact force sen-
sors to control such quantities directly (Cheng et al.,
2007). However, some kind of inertial measuring unit
(IMU) system is required to allow the robot to bal-
ance without making assumptions about the support
surface. In this paper, the compensation of external
disturbances is based on the control of joint torques
using a human inspired vestibular system (Mergner
et al., 2009) that senses the position of the robot in
space and integrates it with signals from other sensors
such as joint angle encoders.
The model used in this work is the DEC (distur-
bance estimation and compensation) model (Mergner,
2010). It is based on studies of human posture control
and movement perception. Postural control allows
humans to make their voluntary movements smooth
and skillful. Postural adjustments provide the move-
ment buttress that the action-reaction law of physics
prescribes and maintain body equilibrium by balanc-
ing the body’s center of mass (body COM) over the
base of support. Impairment of posture control in hu-
mans tends to produce severely disabling syndromes
such as ataxia caused by damage of the cerebellum
or sensory systems, with jerky and dysmetric move-
ments and postural instability (Bastian, 1997).
Various models of human posture control have
been proposed. These posture control models differ
in the approach to internally reconstruct the external
disturbances. One is a control engineering approach
that relates known postural response criteria to exter-
nal disturbances using internal model-based methods
(van der Kooij et al., 1999; Kuo, 2005). The other
approach is mainly biologically inspired, trying to re-
produce human response data in model simulations.
In a reductionist approach, the Independent Channel,
IC model (Peterka, 2002) describes human reactive
sway behavior as the result of three sensory feed-
304
Zebenay M., Lippi V. and Mergener T..
Human-like Humanoid Robot Posture Control.
DOI: 10.5220/0005542603040309
In Proceedings of the 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2015), pages 304-309
ISBN: 978-989-758-123-6
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

back loops (vestibular, joint angle proprioception, vi-
sion). Changes in disturbance magnitude and modal-
ity as well as sensor availability are accounted for
by the experimenter using sensory re-weighting rules.
The here considered DEC model uses sensor fusion-
derived internal reconstructions of the external distur-
bances having impact on body posture. The sensory
re-weightings in the DEC model occur automatically
through inter-sensory interactions and non-linear pro-
cessing in the estimators.
Both the IC and the DEC model originally were
restricted to human balancing responses to moder-
ate disturbances in the sagittal plane around an axis
through the ankle joints. This allowed simplifying
the body biomechanics as a single inverted pendulum,
SIP. In this form, the DEC model was re-embodied
into a SIP postural control robot (Mergner et al.,
2006). The robot was successfully tested in the hu-
man test bed (Mergner et al., 2009), reproducing the
human responses to external stimuli in various dis-
turbance scenarios and changes in sensor availability
(Maurer et al., 2006; Schweigart and Mergner, 2008;
Mergner et al., 2003; Cnyrim et al., 2009; Mergner
et al., 2009). Further development of the DEC model
included its preliminary extension to double inverted
pendulum (DIP) biomechanics, adding hip joints to
the ankle joints. This allowed investigating the hu-
man control underlying the coordination between hip
and ankle joint using a hip joint control and an ankle
joint control interconnected by sensory signals (Het-
tich et al., 2014). Furthermore, the DEC control also
was generalized for multiple DOFs and tested in sim-
ulations (Lippi et al., 2013). In this paper, the control
system is further validated using the Posturob II plat-
form by superimposing two external disturbances as
well as an external disturbance with a voluntary lean.
In the following, Section 2 presents the general
concept of the DEC model. Section 3 describes the
experimental setup. The results are presented in Sec-
tion 4. Finally, conclusions are made and outlooks
into the future are given in Section 5.
2 DISTURBANCE ESTIMATION
The DEC model is based on inter-sensory interactions
(Mergner, 2010). It evolved from neuroscience re-
search on human perception of self-motion and biped
balancing to external disturbances. The concept was
developed in an iterative process using balancing ex-
periments and model simulations. The concept uses
estimates of external stimuli that provide the feedback
to the controller.
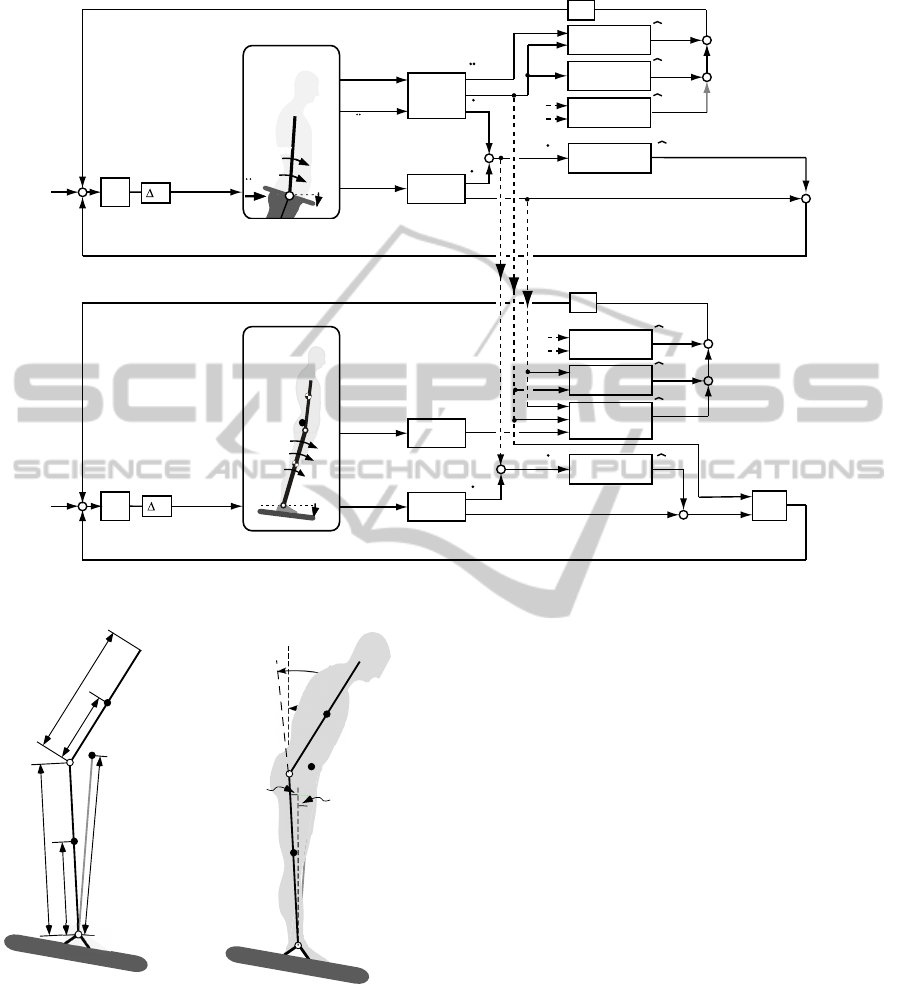
Figure 1 gives an overview of the DEC controller
with a control module for whole body COM balanc-
ing in the ankle joints of the robot and a second DEC
module to control trunk-space (TS) orientation in the
hip joints. Each module contains in its lower part a
control loop for negative feedback, which in humans
together with passive joint stiffness and damping from
muscular-skeletal tissue yields a servo control (not
shown in Fig. 1). With appropriate parameter adjust-
ments of the servo, the actual movement corresponds
to the desired movement defined by a set point sig-
nal (voluntary pose or displacement trajectory). This
applies only in the absence of external disturbances.
External disturbances need to be estimated and com-
pensated, which is done on the basis of sensory inputs.
The external disturbances having impact on the
robot during balancing can be assigned to one of four
classes: (1) Support surface tilt, (2) support surface
translation, (3) contact forces such as a push against
or pull on the body, and (4) field forces such as grav-
ity. The sensor inputs in the here considered exper-
imental condition (eyes closed standing balance) are
(a) proprioceptive sensation of the ankle joint angle
and (b) angular velocity, (c) proprioceptive sensation
of ankle torque, (d) a vestibular sensation of the head
in space orientation with respect to the gravitational
vertical (space vertical, SV), (e) head rotation veloc-
ity, and (f) head translational acceleration. The dis-
turbance estimations are derived from these sensory
inputs through sensor fusions and comprise in addi-
tion a detection threshold and a gain factor.
Figure 2 gives the conventions of the DIP used for
the model. Note that physical variables are presented
in upper case letters and their sensor-derived inter-
nal representations in the model as lower case letters.
Signal fusions follow a summation semantics: trunk-
space angle results from combining additively head-
space and trunk-head angles, α
ts
= α
hs
+ α
th
(invalid
combinations would be α
hs
− α
th
or α
hs
+ α
tl
). This
applies for the disturbances estimations as well as for
the sensory couplings between the hip with the ankle
control module. Note the simplified notation of an-
gles and angular velocity in the model of Fig. 1 as
compared to Fig. 2.
The disturbance estimates command the servo to
compensate the disturbances. This addition of a loop
overall increases the loop gain, which generally tends
to be slightly above the minimum for balancing. The
increase occurs only during and to the extent of the
external disturbance. The four estimation and com-
pensation loops are taken to represent in humans long
latency pathways via higher brain centers (basal gan-
glia, cerebral cortex). In Fig.1, the three upper dis-
turbance estimators in the modules are viewed as pro-
ducing torque signals. For feedback, these signals are
Human-likeHumanoidRobotPostureControl
305
-
t
H
TT
HH__ggrraavv
T
H_in
C
A
FS
LS
x
H
T
A_grav
Ankle Module
External Hip
Torque
Gravitational
Hip Torque
Translational
Acceleration
Leg - Space
Tilt
T
H_ext
T
H_grav
T
H_in
ts
ts
tl
tl
x
Head
ls
TS!
(
T )
H
ls
Gravitational
Ankle Torque
Translational
Acceleration
Foot - Space
Tilt
B
B
B
T
T
A_ext
T
A_grav
T
A_in
lf
lf
fs
fs
(T )
A
COM
ts
ls´´
FS
LS
PROP
H
PROP
A
VEST
Hip Module
Local Loop Negative Feedback
Local Loop Negative Feedback
BS!
= 0°
C
H
t
A
= 0°
-
-
-
tl
ts
-
-
bs
ts´
External Ankle
Torque
TORQUE
T
a
Plant
Trunk-Leg
(TL)
Leg-Foot
(LF)
Trunk-Space
(TS)
Head Acc.
(x
Head
)
Sensors Disturbance estimations
Hip Torque
Ankle Torque
Trunk
Body
T
A_ext
T
A_in
COM
TS
Figure 1: Schematics of the DEC model for DIP robot Posture control.
l
L
l
T
h
T
h
L
h
B
COM
B
α
BS
COM
T
COM
L
α
TL
α
LS
α
TS
SV
SV
Trunk, T
Legs, L
Figure 2: Conventions of the DIP posture parameters. SV,
space vertical.
transformed into joint angle equivalents (boxes B
T
and B
B
). The Local Loops represent short latency
loops through spinal cord and brain stem. Compen-
sation of inter-link coupling forces tend to be covered
by the estimators. Trunk angular acceleration exerts a
coupling force on the leg link, which the ankle control
module treats as a contact force disturbance. Leg an-
gular accelerations produce eccentric rotation of the
hip, which the hip control module treats as distur-
bances in terms of support surface translational ac-
celeration and tilt.
The next subsections present the estimation mod-
els that are used for the DIP humanoid, referring to
conventions defined in Figure 2.
2.1 Estimation of Leg-space Tilt
In the hip module of Fig. 2, the leg-space angle repre-
sents the support surface tilt disturbance for the trunk.
The leg-space angle is estimated using the vestibular
trunk-space angular velocity signal,
˙
α
ts
and a propri-
oceptive trunk-leg angular velocity signal,
˙
α
tl
in the
following form:
ˆ
α
ls
=
Z
(
˙
α
ts
−
˙
α
tl
)dt (1)
The final estimate involves a velocity detection
threshold and a gain factor, both of which were iden-
tified in human experiments (applies also to following
estimates).
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
306

2.2 Estimation of Foot-space Tilt
In the ankle module, this estimate is obtained from
the vestibular trunk-space angular velocity signal,
˙
α
ts
(down channeled from leg segment), the propriocep-
tive trunk-leg angular velocity signal,
˙
α
tl
and the leg-
foot velocity signal,
˙
α
l f
as follows:
ˆ
α
f s
=
Z
˙
α
ts
−
˙
α
tl
−
˙
α
l f
dt (2)
2.3 Estimation of Support Translation
The vestibular sensor provides an estimate of trunk
support translation acceleration as follows:
ˆ
¨x
H
= ¨x
V x
−
d
˙
α
ts
dt
l
T
(3)
where ¨x
V x
is a horizontal head (vestibular) transla-
tional acceleration,
¨
α
ts
is the head angular accel-
eration and l
T
represents the distance between the
vestibular organ and the hip joint. The ¨x
H
estimate
is used to estimate the hip torque as follows:
ˆ
T
H
in
= ¨x
H
m
T
h
T
(4)
2.4 Estimation of Gravitational Torque
The estimation of the gravitational ankle torque is
computed as:
ˆ
T
A
grav
= m
B
h
B
gα
bs
(5)
The signal is processed in two parallel pathways, one
via a low pass filter and gain factor to account for hu-
man data at low tilt frequencies, and the other with
detection threshold and gain factor.
The estimation of the gravitational hip torque is
computed in a corresponding way as:
ˆ
T
H
grav
= m
T
h
T
gα
ts
(6)
2.5 Estimate of Contact Force
An external ankle torque from a push against the body
is computed from a sensory signal of the active ankle
torque ,T
a
, and an internal estimate of the total torque,
T
A
which is obtained from the body-space angular ac-
celeration as follows:
T
A
= J
B
¨
α
bs
(7)
where the J
B
is the moment of inertia of the body
around the ankle joint. The external ankle torque is
computed as:
ˆ
T
A
ext
= T
A
− T
A
grav
− T
a
(8)
The external hip torque can be computed in a corre-
sponding way.
2.6 Estimation of Body-space Angle
Compensating in the ankle joint module the body
COM requires its computation (Fig.2, box COM and
inside box Gravitational Ankle Torque). Body-space
position
ˆ
α
bs
is computed as:
ˆ
α
bs
=
(h
T
α
ts
+ l
L
α
ls
)m
T
+ h
T
α
ls
m
L
h
B
m
B
(9)
where m
B
is body mass, m
T
is trunk mass, m
L
is the
mass of both legs, h
B
is body COM height, h
T
is
trunk COM height, h
L
is leg COM height and l
L
is
leg length. Assuming small angular changes, h
B
is set
constant.
3 EXPERIMENTAL SETUP
PostuRob II (Fig. 3) was constructed with human-
like anthropometric parameters (Hettich et al., 2014).
It consists of trunk, leg and feet segments of alu-
minum, interconnected by hinge joints representing
the hip joints and the ankle joints. Signals from
mechatronic sensors (vestibular, joint torque, joint an-
gular position and velocity) were input into a real time
PC, where the control model was executed as a com-
piled Simulink model (Real-Time Windows Target,
The MathWorks Inc., Natick, USA). The vestibular
Artificial (Pneumatic) Muscles
Vestibular Sensor
Joint Angle Sensors
Joint Torque Sensors
Pressure Sensors
Hip Joints
Ankle Joints
Motion Platform
Figure 3: PostuRob II standing on a motion platform.
sensor processed accelerometer and gyrometer sig-
nals and delivered the signals (i)trunk angular veloc-
ity, (ii)trunk angle with respect to the gravitational
vertical, and (iii)linear acceleration of the upper trunk
end representing the head (Mergner et al., 2009). The
torque commands for hip and ankle joints actuate ar-
tificial pneumatic muscles (FESTO, Esslingen, Ger-
many). An inner torque control loop ensured that
the actual torque matched the desired torque. Experi-
ments were performed in a human posture control lab-
oratory. External disturbances consisted of support
Human-likeHumanoidRobotPostureControl
307
surface tilt in the sagittal plane while the robot was
standing on a 6 DOF motion platform. Furthermore,
contact force stimuli were applied by pushes with the
hand, and 4
◦
voluntary lean of the trunk was com-
manded via the T S! set point signal (Fig.1) using a
smoothed ramp. Estimated lumped time delays of the
hip and ankle modules were set to 50 ms and 80 ms,
respectively. Together with an estimated time delay
of 40 ms for the PC processing, the delays amounted
to 90 ms for the hip joint control and 120 ms for the
ankle joint control.
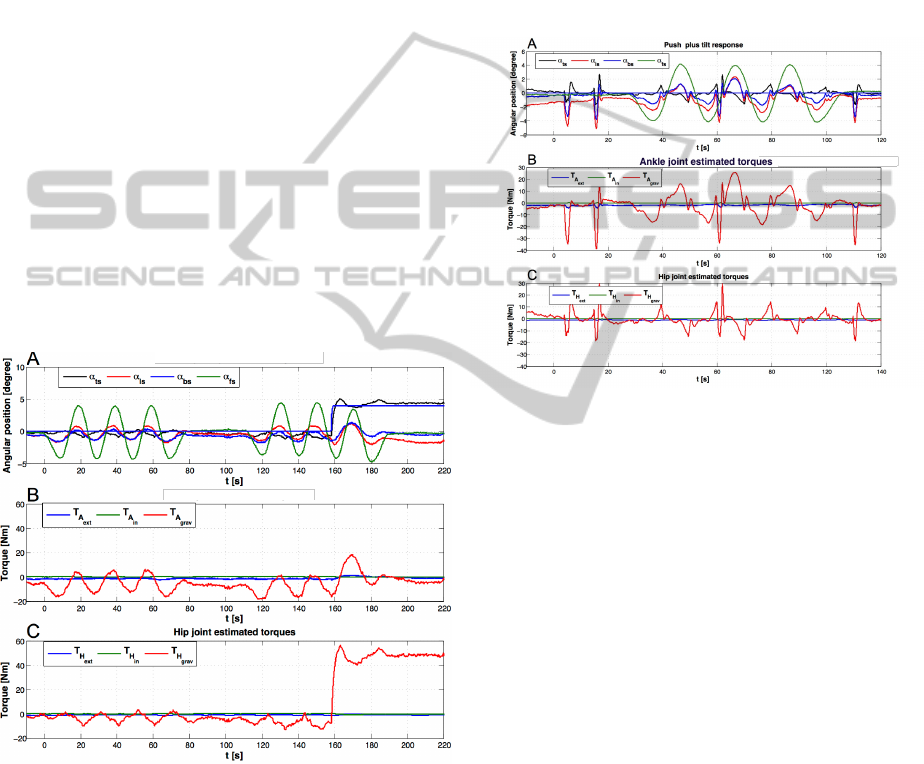
4 RESULTS
Figure 4 shows in the first part the results obtained
with a series of sinusoidal support surface tilts alone.
Panel A gives the evoked kinematic sway responses,
where α
f s
reflects essentially the tilt stimulus and α
BS
the body COM balancing response in the ankle joints.
The other two traces are the trunk-space and leg-space
angular excursions. Panels B and C give the sensed
ankle torque and hip torque, respectively. The applied
surface support tilt was of ±4
◦
amplitude and 0.1Hz.
Ankle joint estimated torques
Tilit and Voluntary lean response
Figure 4: Superposition of support surface tilt and voluntary
lean. Kinematic responses (A), sensed torque at the ankle
joint (B) and the hip joint (C).
In the later part of Fig. 4, starting at about 110 s, a
second tilt series starts. At around 160 s, a voluntary
trunk lean of 4 degree forward is superimposed (see
black trace). The DEC module of the hip joint brings
the α
ts
in the desired position, while the DEC module
of the ankle joint continues with the α
bs
balancing.
The forward trunk lean is associated with backward
leg lean in α
ls
(red trace). It is mainly this inter-link
coordination that limits the α
bs
excursion, keeping the
COM above the base of support. This hip-ankle coor-
dination is human-like (Hettich et al., 2014).
Figure 5 shows the results obtained in PostuRob
II when superimposing external push stimuli and sup-
port surface tilt (presentation as in Fig. 4). Four push
stimuli (large transients) were applied, one of them
during a support surface tilt series (sine-like curves).
Thus, the robot’s stance stabilization by the DEC con-
troller tolerates the superposition of the two external
disturbances.
Figure 5: Push responses: A) Angular position responses,
B) and C) are the sensed torques for the ankle and hip, re-
spectively.
5 CONCLUSIONS AND FUTURE
WORK
The experiments show that the DEC controller in
the DIP robot is able to deal with superposition of
more than one type of external disturbances and su-
perposition of external disturbances and voluntary
movements such a trunk lean. The experiments also
demonstrate that the controller is tolerant against
spontaneous body sway originating from internal
noise, mostly from vestibular input, this during the
balancing of external disturbances and in the pres-
ence of a lasting trunk lean that challenged the balanc-
ing. Furthermore, the robot demonstrated a human-
like mechanical compliance, which was particularly
evident in its reactions to the external push.
The experiments also revealed emergence of a hip-
ankle coordination during voluntary trunk lean, which
on closer inspection also occurred in the responses to
external disturbances, and is human-like (Alexandrov
et al., 1998; Freitas et al., 2006). It is related to the an-
kle controller’s task to stabilize the body COM over
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
308

the base of support (it is not found when the task is
to maintain the leg-space orientation vertical). No-
ticeably, the coordination occurs here through the in-
teractions between the hip and ankle control modules
rather than through preprogrammed motor command
patterns, which also have been used to control robots
in the form of synergies (Hauser et al., 2011).
Currently, further developments of the DEC con-
cept comprise tests in different robotics platforms.
Furthermore, under investigation are generalizations
of the modular structure of the DEC controller to
conditions that are not a multiple inverted pendulum.
This includes controlling balance in the frontal plane,
alone and in combination with the sagittal plane bal-
ancing, generic poses with high degrees of freedom,
and integrating the balancing in the control of gait.
In particular, in the framework of the H
2
R project
(see below), the controller is tested for the balancing
control of a robot with multiple DOFs with compli-
ant actuation, developed within the consortium, and
integrated in the gait controller for the stabilization
of some links. In the framework of the EMBalance
project, the DEC controller is modified such that the
robot’s balancing behavior mimics certain neurologi-
cal deficits such as bilateral vestibular damage or loss.
ACKNOWLEDGEMENTS
The authors thank G. Hettich and L. Assl
¨
ander
for their support during the experiments. The
financial support from the European projects EM-
Bbalance (http://www.embalance.eu/)and H
2
R
(http://www.h2rproject.eu/) are appreciated.
REFERENCES
Alexandrov, A., Frolov, A., and Massion, J. (1998). Axial
synergies during human upper trunk bending. Experi-
mental Brain Research, 118(2):210–220.
Bastian, A. J. (1997). Mechanisms of ataxia. Physical Ther-
apy, 77:672–675.
Cheng, G., Hyon, S.-H., Morimoto, J., Ude, A., Hale, J. G.,
Colvin, G., Scroggin, W., and Jacobsen, S. C. (2007).
CB: A humanoid research platform for exploring neu-
roscience. Advanced Robotics, 21:1097–1114.
Cnyrim, C., Mergner, T., and Maurer, C. (2009). Potential
role of force cues in human stance control. Experi-
mental Brain Research, 194:419433.
Freitas, S. M., Duarte, M., and Latash, M. L. (2006). Two
kinematic synergies in voluntary whole-body move-
ments during standing. Journal of Neurophysiology,
95(2):636–645.
Goswami, A. (1999). Postural stability of biped robots and
the foot-rotation indicator (FRI) point. The Interna-
tional Journal of Robotics Research, 18(6):523–533.
Hauser, H., Neumann, G., Ijspeert, A. J., and Maass, W.
(2011). Biologically inspired kinematic synergies en-
able linear balance control of a humanoid robot. Bio-
logical cybernetics, 104(4-5):235–249.
Hettich, G., Asslnder, L., Gollhofer, A., and Mergner, T.
(2014). Human hipankle coordination emerging from
multisensory feedback control. Human Movement
Science, 37:123–146.
Kuo, A. D. (2005). An optimal state estimation model of
sensory integration in human postural balance. Jour-
nal of Neural Engineering, 2(3):S235.
Lippi, V., Mergner, T., and Hettich, G. (2013). A bio-
inspired modular system for humanoid posture con-
trol. . In: Ugur, E., Oztop, E., Morimoto, J., and Ishii,
S. (Eds) Proceedings of IROS 2013 Workshop on Neu-
roscience and Robotics ”Towards a robot-enabled,
neuroscience-guided healthy society”.
Maurer, C., Mergner, T., and Peterka, R. J. (2006). Multi-
sensory control of human upright stance. Experimen-
tal Brain Research, 171:231250.
Mergner, T. (2010). A neurological view on reactive human
stance control. Annual Review Control, 34:77198.
Mergner, T., Huethe, F., Maurer, C., and Ament, C. (2006).
Human equilibrium control principles implemented
into a biped robot. Robot Design, Dynamics, and Con-
trol, 487:271–279.
Mergner, T., Maurer, C., and Peterka, R. J. (2003). A
multisensory posture control model of human upright
stance. Progress in Brain Research, 142:189–201.
Mergner, T., Schweigart, G., and Fennell, L. (2009).
Vestibular humanoid postural control. Journal of
Physiology - Paris, 103:178–194.
Nori, F., Peters, J., Padois, V., Babic, J., Mistry, M., Ivaldi,
S., et al. (2014). Whole-body motion in humans and
humanoids. In Workshop on New Research Frontiers
for Intelligent Autonomous Systems.
Peterka, R. J. (2002). Sensorimotor integration in hu-
man postural control. Journal of Neurophysiology,
88:10971118.
Schweigart, G. and Mergner, T. (2008). Human stance con-
trol beyond steady state response and inverted pen-
dulum simplification. Experimental Brain Research,
185:635–653.
Torricelli, D., Mizanoor, R. S., Gonzalez, J., Lippi, V., Het-
tich, G., Asslaender, L., Weckx, M., Vanderborght,
B., Dosen, S., Sartori, M., et al. (2014). Benchmark-
ing human-like posture and locomotion of humanoid
robots: A preliminary scheme. In Biomimetic and Bio-
hybrid Systems, pages 320–331. Springer.
van der Kooij, H., Jacobs, R., Koopman, B., and Grooten-
boer, H. (1999). A multisensory integration model
of human stance control. Biological Cybernetics,
80:299–308.
Human-likeHumanoidRobotPostureControl
309
