
Can UAV and UGV Be Best Buddies?
Towards Heterogeneous Aerial-ground Cooperative Robot System for Complex
Aerial Manipulation Tasks
Tamara Petrovic, Tomislav Haus, Barbara Arbanas, Matko Orsag and Stjepan Bogdan
University of Zagreb, Faculty of Electrical Engineering and Computing, Unska 3, 10000 Zagreb, Croatia
Keywords:
Path Planning, Task Scheduling, UAV, UGV, Aerial Manipulation.
Abstract:
This paper presents the results of our efforts to build a heterogeneous robotic system capable of executing
complex disaster response and recovery tasks. We aim to explore high level task scheduling and mission
planning algorithms that enable various types of robots to cooperate together, utilizing each others strengths to
yield a symbiotic robotic system. In the proposed scenario, a ground vehicle and an aerial robot work together
to close a valve in a disaster stricken industrial environment. To that end we use TÆMS framework in order
to specify interrelationships between mission subtasks and develop an effective scheduling and coordination
mechanism, inspired by Generalized Partial Global Planning. We present simulation results with two different
outcomes that show cooperative capabilities of the system.
1 INTRODUCTION
In recent years we have witnessed a tremendous rise
of research potential in the field of unmanned aerial
vehicles (UAVs). Consequently, the worldwide UAV
market grows rapidly as well. Unfortunately, mostly
due to UAV’s limited payload capabilities, in both re-
search and industry, engineers focused their efforts
to deploy UAVs in surveillance, reconnaissance or
search and rescue mission, avoiding all possible in-
teraction with the environment. However, the ability
of aerial vehicles to manipulate a target or carry ob-
jects and interact with the environment, could greatly
expand the application potential of UAVs to: infras-
tructure inspection (Fumagalli et al., 2014), construc-
tion and assembly (Jimenez-Cano et al., 2013; Lind-
sey et al., 2012), agriculture, urban sanitation, high-
speed grasping and payload transportation (Thomas
et al., 2014), (Sreenath et al., 2013) and many more
(Kim et al., 2013; Scholten et al., 2013; Fumagalli
et al., 2012).
In our research we are particularly interested in
aerial manipulation employing a dual-arm manipula-
tor on-board a UAV, thus completing a mobile ma-
nipulating unmanned aerial vehicle (MMUAV). In
our previous work we have focused our efforts to
model the influence of the dual-arm manipulator to
the change of the center of mass and moment of iner-
tia(Orsag et al., 2014), and to devise a necessary sta-
bility criteria for dexterous aerial manipulation (Ko-
rpela et al., 2013). We have been able to utilize our
approach on various aerial manipulation tasks, which
include but are not limited to: pick and place, con-
struction and assembly and perching and manipulat-
ing objects (Korpela et al., 2014).
According to the UAV classification (Korchenko
and Illyash, 2013), most quadrotor aerial platforms
designed so far can be categorized as small or mi-
cro UAVs. This implies that the vehicle weight is
less than 5kg, is capable of flying below 150m alti-
tude and has the range of less than 10km, capable of
carrying merely surveillance equipment with limited
time-of-flight capabilities. To put things into perspec-
tive, for all sense and purposes, todays UAVs can-
not be deployed in complex aerial manipulation tasks
which would normally require lifting heavy objects
and long execution time. In order to solve this prob-
lem, we propose introducing an unmanned ground
vehicle (UGV) to aid and assist the UAV in such
complex manipulation scenarios. The two vehicles
complete each other, thus forming a symbiotic aerial-
ground robot system. In such a system, the UGV pro-
vides the UAV with a safe landing area and transports
it across large distances, thus saving its battery life,
and preserving it for other tasks. On the other hand,
the UAV can provide additional degree of freedom for
the UGV, enabling it to negotiate obstacles by simply
lifting it across them. In our previous work, we have
238
Petrovic T., Haus T., Arbanas B., Orsag M. and Bogdan S..
Can UAV and UGV Be Best Buddies? - Towards Heterogeneous Aerial-ground Cooperative Robot System for Complex Aerial Manipulation Tasks.
DOI: 10.5220/0005548302380245
In Proceedings of the 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2015), pages 238-245
ISBN: 978-989-758-122-9
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
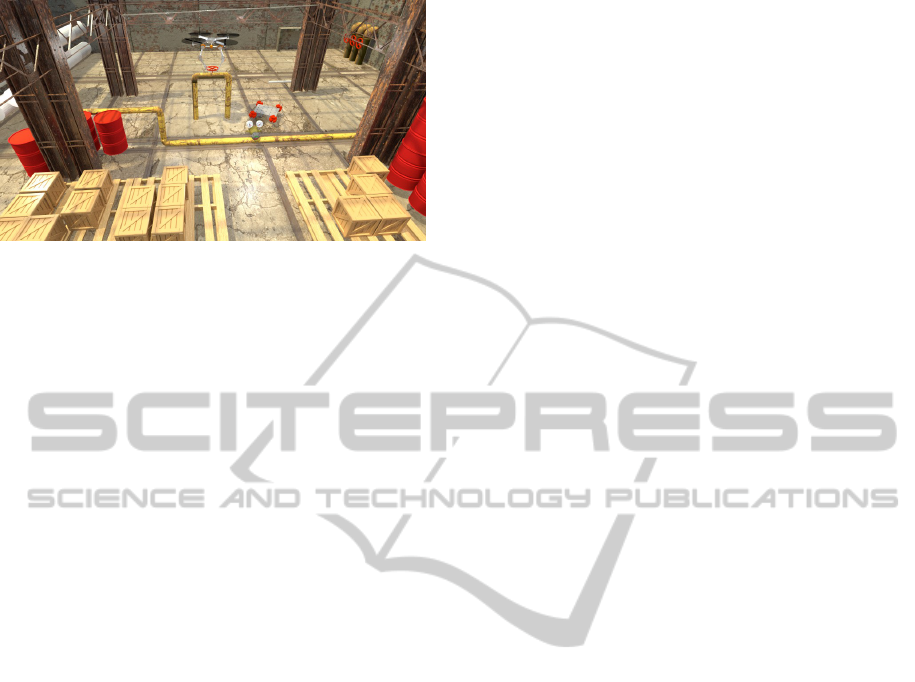
Figure 1: Heterogeneous symbiotic robotic system de-
ployed on a mission to close a valve in a disaster stricken
industrial environment.
developed a similar concept for an unmanned surface
marine vehicle (USV) and UAV marsupial system that
works together to recover objects floating at the sea
surface (Miskovic et al., 2014). Of course, control-
ling a heterogeneous team of robots, like the one pro-
posed herein, requires precise, fast and reliable high
level planning and task allocation algorithm, which is
the backbone of this paper.
Mission planning in robotic teams has been inten-
sively studied in different research communities. In
(Wurm et al., 2013) authors use PDDL specification
language and integrate temporal planning approach
with cost-based planner for target assignment prob-
lem, and apply their approach to marsupial team of
robots. In (Raman, 2014) authors use Linear Tempo-
ral Logic (LTL) for specification of high-level goals
and provide a framework for synthesis of reactive
controllers. More examples of LTL-based approach
are disseminated in (Ding et al., 2011) and (Saha
et al., 2014), where it is utilized for safe decentral-
ized collision avoidance. Although this approach al-
lows one to synthesize provably correct controllers, it
often suffers from intensive-computational problems,
and the inability to quantify planner objectives. In
this paper we consider a specific application domain
with two autonomous vehicles of different motion ca-
pabilities required to cooperate in a common obstacle-
dense environment to achieve a high-level mission
goal. For mission specification we use TÆMS frame-
work, which allows us to specify complex relations
between mission subtasks and to quantitatively ex-
press the contribution of each subtask to the overall
mission plan. We develop an effective scheduling and
coordination mechanism, which is inspired by Gener-
alized Partial Global Planning (GPGP) (Lesser et al.,
2004) framework. The mechanism yields a frame-
work for mission planning algorithms as well as the
implementation of communication and coordination
protocols applied to each individual vehicle.
The paper is structured as follows. In Section 2 we
describe the problem of distributed mission planning
for the UAV-UGV system. In Section 3 we present
TÆMS specification framework and in Section 4 we
describe developed coordination algorithm. Section 5
shows simulation results, and Section 6 gives a brief
conclusion.
2 PROBLEM DESCRIPTION
One potential use case scenario for the proposed sys-
tem is shown in Fig. 1, where a MMUAV is de-
ployed in order to close a valve in a disaster stricken
industrial environment. There are three prerequisites
needed to complete such a complex assignment: 1)
a reliable and stable control system for aerial ma-
nipulation, 2) successful self-localization and map-
ping in three dimensional space and 3) fast planning
and task allocation algorithms, which enable collab-
oration between ground and aerial vehicles. So far,
we have successfully tackled the first prerequisite,
and demonstrated performance capabilities of our
dual arm unmanned aerial system in a mockup lab-
oratory environments on multiple benchmark tasks:
pick and place (Fig. 2(b)); construction and as-
sembly (Fig.2(c)); and perch and manipulate objects
(Fig.2(a)). In recent years, the robotics commu-
nity concentrated a lot of effort into solving the sec-
ond prerequisite, showing very promising results, and
therefore allowing our research to focus on the high
level planning algorithms that are disseminated in this
paper.
2.1 Preliminaries
With aerial manipulation capabilities, the set of skills
of a MMUAV grows from simple 4DOF positioning
and surveillance to real environment interaction. The
ability of a UAV to pick up a UGV demonstrates the
symbiotic nature of the proposed heterogeneous robot
system, allowing the UGV to fly over obstacles which
it normally would not be able to negotiate. On the
other hand, in order to prolong the battery life, the
UAV can land and perch onto the UGV, relying on the
ground vehicle to carry it as close as possible to the
target. To define a high-level mission of the system,
we first abstract the capabilities of the MMUAV and
UGV into the set of behavior primitives:
2.2 MMUAV Behavior Primitives
• Motion Primitive
Motion primitive M
UAV
(p
i
, p
j
) consists of plan-
ning and execution of an obstacle-free path p from
CanUAVandUGVBeBestBuddies?-TowardsHeterogeneousAerial-groundCooperativeRobotSystemforComplex
AerialManipulationTasks
239

(a) Valve turning (b) Pick and place (c) Construction
Figure 2: Aerial manipulation benchmark tasks.
point p
i
∈ SE(3) to p
j
∈ SE(3) in a given obstacle
cluttered 3D environment. This motion primitive
is executed whenever theUAV is flying through
the environment; this includes flying, landing on
the UGV or valve, take-off, turning the valve, as
well as carrying the UGV over obstacles. The cost
of motion primitive execution, C(M
UAV
(p
i
, p
j
)) ∈
R
+
0
, is defined as C(M
UAV
(p
i
, p
j
)) = length(p) ·
E
UAV
, where E
UAV
corresponds to UAV energy
consumed per unit of distance. The value of E
UAV
depends on the UAV characteristics, and whether
the UAV is carrying the UGV or not.
• Manipulation Primitives
Manipulation primitives consist of planning and
executing a particular UAV action using solely
robotic hands attached to the UAV. The manipu-
lation primitives used in our application are P(p
i
)
- perch on the UGV at position p
i
, R(p
i
) - release
the UGV and G(p
i
) - grip valve. Each manipula-
tion primitive is associated with a cost C(
∗
) ∈ R
+
0
.
2.3 UGV Behavior Primitives
• Motion Primitive
Motion primitive M
UGV
(p
i
, p
j
) is analogous to
the UAV motion primitive. It consists of plan-
ning and execution of an obstacle-free path p from
point p
i
∈ SE(2) to p
j
∈ SE(2), where SE(2) state
space corresponds to the ground (floor) of the
given 3D environment. This motion primitive is
executed whenever the UGV is driving through
the environment using its own power and, there-
fore, does not include the UGV being carried over
an obstacle by the UAV. The cost of motion primi-
tive execution, C(M
UGV
(p
i
, p
j
)) ∈ R
+
0
, is defined
as C(M
UGV
(p
i
, p
j
)) = length(p) · E
UGV
, where
E
UGV
corresponds to UGV energy spent per unit
of distance. The value of E
UGV
depends on the
UGV characteristics.
2.4 Problem Definition
Even though ideas and methods presented in this pa-
per apply to a wider range of applications and tasks,
we elaborate our approach using a specific high-level
mission. This mission requires the UAV to approach
and turn a valve, whose position in the given 3D en-
vironment is known prior to execution. In practice
this would require a lightweight UAV system to enter
the area and build a map of the environment, which
can be later used as a starting point for the proposed
robotic system.
• Mission Schedule
Let B
UAV
(B
UGV
) denote the set of the UAV
(UGV) behaviors described in the previous
section extended with zero-cost idle behaviors
I
UAV
(I
UGV
). Let p
UAV
0
∈ SE(3) ((p
UGV
0
) ∈ SE(2))
be the initial positions of vehicles in the en-
vironment, and p
v
the valve position. The
high-level mission schedule consists of or-
dered sequences of UAV and UGV behav-
iors including expected start and end times,
(b
1
UAV
, t
1
, t
2
), (b
2
UAV
, t
2
, t
3
), . . . , (b
n
UAV
, t
n−1
, t
n
) and
(b
1
UGV
, t
0
1
, t
0
2
), (b
2
UGV
, t
0
2
, t
0
3
), . . . , (b
n
UGV
, t
0
n−1
, t
0
n
),
such that a sequential execution of individual
behaviors results in the execution of the high-
level mission goal. Derived mission schedule
serves as a coordination framework during
missions execution, even though actual execution
times may differ from the initial plan. Mission
schedule is feasible if UAV (UGV) sequence has
no discontinuities in space and time, and if the
behaviors that are active at a certain time instance
are achievable in the real system.
• Decentralized Mission Planning Problem
Given the map of an environment, motion primi-
tives and a high-level mission determine a decen-
tralized method, which runs on each vehicle sepa-
rately, each responsible for the construction of in-
dividual schedules to achieve the overall mission
plan. Furthermore, determine a coordination pro-
tocol that ensures a robust mission execution.
Example 1
Consider an autonomous system with a UAV and a
UGV, operating in an environment given in Fig. 3.
The high-level goal is to approach and turn the valve
V located at position p
V
. Each robot has a knowl-
edge of the environment map, and plans and exe-
cutes an obstacle-free path. Fig. 3 shows that the
mission can be executed in several different ways.
First, the UAV can complete this task alone by execut-
ing the following behavior: position above the valve
(M
UAV
(p
UGV
, p
V
)), grip the valve (G(p
V
)) and turn
the valve (T (p
V
)). Other options include cooperation
with the UGV. One possible solution is that the UAV
lands on the UGV (M
UAV
(p
UAV
, p
UGV
), travels on it
towards the valve (I
UAV
and M
UGV
(p
UGV
, p
v
)), then
grips the valve (G(p
V
)) and turns it (T (p
V
)). Depend-
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
240

Figure 3: Figure shows the obstacle environment used dur-
ing mission planner, which is the derivative of the full
mockup environment from Fig. 1. The cluttered environ-
ment consists of box-like obstacles, a pipeline and the goal
valve, with red lines representing map limits.
ing on the environment, one possible solution could
be to land on an UGV and relying on it to carry it
over obstacles. Given the assumption that each robot
has only a partial knowledge of the mission, our goal
is to develop a method that would, in a decentralized
manner, determine one of such solutions.
3 SPECIFICATION
FRAMEWORK: TÆMS
Specifying mission and its tasks in a hierarchical
manner is a common approach in the coordination of
a group of agents. This approach requires the exis-
tence of a hierarchical task network, where each task
is broken down into a number of subtasks required
to complete it. Since the agents are heterogeneous,
each has a number of specific skills that allow the
agent to perform a particular subtask of the task net-
work. Moreover, each vehicle is aware of only a
subset of tasks in the hierarchy, namely, tasks it can
perform alone, and direct predecessors/successors of
these tasks. The challenge is then to determine which
part of the task network will be executed by which
agent in time. This whole process takes place with-
out the presence of central intelligence management,
which places special emphasis on the interaction be-
tween agents through the exchange of common objec-
tives and action plans.
The language for specifying agents skills and
tasks, which we adopt in this paper, is known as
TÆMS (Task Analysis, Environment Modeling and
Simulation Language) language (Chen and Decker,
2004). TÆMS is a language designed to represent
hierarchical task networks that contain complex rela-
tions between individual tasks. As we will demon-
strate in the following sections, the most distinctive
characteristic of TÆMS is that it allows the mission
designer to quantitatively specify the capabilities of
each individual agent and the correlation between dif-
ferent agents’ tasks. The TÆMS hierarchy tree con-
sists of nodes, which represent tasks and actions in-
volved in the achievement of a common goal. Root
level node corresponds to the high-level system goal.
• Action Nodes
At the bottom of the hierarchy are action nodes
(marked as rectangles). These nodes are unique
since only they correspond to actionable tasks of
an agent, while the purpose of task nodes is to or-
ganize action nodes into a meaningful structure.
The specification of an action node contains in-
formation relevant to the action execution. Each
action node is described quantitatively with its du-
ration and cost. Duration is the time required to
execute an action and is used for scheduling indi-
vidual actions. All values are a-priori expectations
for a specific action execution.
In the studied UAV-UGV system action nodes cor-
respond to behavior primitives. Cost of motion
primitives is estimated on-line as length of the
path obtained using a path planner, and depends
on the current vehicle positions and the environ-
ment. When estimating the cost of the UAV carry-
ing the UGV over an obstacle based on the length
of the path to the first obstacle on UGV’s path.
The remain of the path to the valve is estimated as
an average of UAV and UGV path lengths.
• Task Nodes
While action nodes represent actions that an agent
can perform in reality, task is an abstract action
that agent performs as a series of atomic actions.
The primary purpose of a task is to combine its
subtasks in a structure that provides information
on how the subtasks can be combined to accom-
plish the task alone. This parent-child relation is
modeled using quality accumulation function,
• Quality Accumulation Function
QAF defines how the quality of subtask perfor-
mance affects the overall quality of the parent task
and is reciprocal to the cost of the task. TÆMS
structure defines many possible parent-child rela-
tions: (q
min
, q
sum
, q
seq min
). We here describe the
ones used for UAV-UGV system.
– q
max
- equivalent to the logical operator OR.
The overall quality of the task is equal to the
maximum quality of its subtasks. Therefore,
to accomplish the task it is possible to per-
form only one subtasks with quality greater
than zero.
CanUAVandUGVBeBestBuddies?-TowardsHeterogeneousAerial-groundCooperativeRobotSystemforComplex
AerialManipulationTasks
241

– q
sum all
- equivalent to the logical operator
AND, and equals to the sum of subtask quali-
ties if all subtasks can be performed, otherwise
its value is zero.
• Interrelationships
QAF describes parent-child relations, while rela-
tion between tasks are defined in TÆMS as a sep-
arate set of interrelationships. Interrelationship
that is used in our application is enable, which
demands that one task is finished before another
is started.
4 COORDINATION AND
SCHEDULING
The coordination algorithm run on each robot is di-
vided into several stages. Agents run their respec-
tive algorithms independently, but we ensure, using
appropriate communication protocols, that agents are
always in the same stage of the coordination process.
The presented procedure can be used for more than
two independent agents. In the text that follows we
describe each stage of the coordination process sepa-
rately:
1. Init
Coordination is started when high-level goal
’Open valve’ is broadcasted. Agents involved in
execution of ’Open valve’ task, respond by broad-
casting tasks contained in their view of TÆMS
tree. Next, a DTC (Design to criteria) scheduler
is called, which assesses agents actions, and cre-
ates, for each task in agent’s TÆMS structure, all
alternatives for task execution and their qualities.
An alternative is a set of actions whose execution
may lead to execution of ’Open-valve’ task. The
best alternative is chosen for further procedure.
2. Evaluate Non-local Tasks.
Each agent needs to identify tasks of other
agents that affect its own performance. These
are parent-child coordination relationships (PC),
determined as: PC
a
= {(x
2
, b)|x
1
∈ T
a
, x
2
∈
T
b
, x
2
is child of x
1
}, where a, b individual agents
and T
a
, T
b
agents’ task sets.
For each element of PC
a
, agent a requests and re-
ceives from agent b quality of child task. If more
than one agent can execute a particular non-local
task, mean value of the outcome is taken into ac-
count. Initial timed schedule is then created. An
example of initial schedule is: ((Position above
UGV, 0, 0), (Land on UGV, 0, 2), (UAV stand
still, 2, 2), (Perch, 2, 3), (Position above UGV,
3, 4), (Land on UGV, 4, 6), (Release, 6, 7), (Q
stand still, 7, 7), (Position above UGV, 7, 8), (Grip
valve, 8, 18), (Turn left, 18, 33)).
3. Resolve Redundant Tasks. At this stage we
solve redundancy issues, if such exist. Redun-
dancy is a situation where a task can be executed
using more than one agent, and is scheduled for
execution in the initial schedule. In that case, one
of the involved agents is chosen as a referee, who
communicates with other agents and chooses the
best one. Other agents discard redundant tasks
from their alternative. Described UAV-UGV sys-
tem does not have redundant tasks.
4. Update Schedule. At this stage, each action
is assigned to a dedicated agent, and individual
schedules are updated accordingly. Afterwards,
each agent identifies hard interrelationships: tasks
(x
1
) that enable tasks (x
2
) of other agents. Agent
makes a commitment to the other agent to per-
form its task until time T, estimated from its initial
schedule.
5. Create Final Schedule At this stage, agent con-
structs a timed schedule using information about
its own commitments, as well as commitments of
other agents to it. If a schedule that satisfies com-
mits cannot be found, agent updated its commit-
ments again, and schedules its plan again. This
procedure is repeated until a feasible schedule is
found. Resulting schedule for the previous ex-
ample for UAV is: ((Position above UGV, 0, 0),
(Land on UGV, 0, 2), (UAV stand still, 2, 2),
(slack, 2, 17), (Perch, 17, 18), (Position above
UGV, 18, 19), (Land on UGV, 19, 21), (Release,
21, 22), (UAV stand still, 22, 22), (Position above
UGV, 22, 23), (Grip valve, 23, 33), (Turn left, 33,
48)), and for UGV: ((UGV stand still, 0, 0), (slack,
0, 2), (UGV drive to position, 2, 17), (UGV stand
still, 17, 17), (slack, 17, 22), (UGV drive to lo-
cation, 22, 23)). Denote that slack behavior cor-
responds to the execution of a task of the other
agent.
6. Coordination and Execution Agents start exe-
cuting tasks based on their schedules. If any of the
agents cannot achieve its commitments in given
time tolerance, or executes it earlier, schedules of
each agent is adjusted accordingly.
It should be noted here that the solution obtained
using this approach always in form of a sequence
of UAV/UGV behaviors (actions) where each action
occurs only ones. More complex solutions, which
include diverse sequences of vehicle behaviors and
reactive behavior, can be achieved by repeating the
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
242

scheduling procedure depending on the state of the
environment.
5 SIMULATION RESULTS
5.1 Simulation Testbed Description
The chosen use case scenario has been implemented
in the Gazebo simulator using its Robot Operating
System (ROS) interface. We developed all algorithms
in the Python programming language and we utilized
ROS as a communication middleware. One should
note that ROS multimaster extensions, such as FKIE
Multimaster, support decentralized implementation
of the algorithms, which is a necessary option for the
proposed system.
As a UAV in the Gazebo simulator, we use a re-
alistic multicopter model, whose capabilities are en-
hanced with a dual robotic arm mounted on-board.
The model is equipped with a standard sensory set
- inertial measurement unit (accelerometer and gyro-
scope) and a generic pose sensor (e.g. VI-sensor),
which gives the copter’s position and orientation. The
estimated data is used as feedback in the low-level
control algorithms, comprised of a classical PID cas-
cade control structure. For high level controller, we
use a mission planner comprised of several parts -
a navigation algorithm (path planning and trajectory
generation), a coordination algorithm and an action
server. We utilize ROS actionlib stack to establish
a client-server communication between the coordina-
tion algorithm and the navigation algorithm. The ac-
tion server acts as a bridge - it receives actions from
the coordination algorithm and triggers their execu-
tion by calling appropriate services of the navigation
algorithm. The action server also publishes the es-
timated percentage of the completion of an ongoing
action and notifies when an action is fully completed.
For the path planning task within the copter’s nav-
igation algorithm, we utilize The Open Motion Plan-
ning Library (OMPL) (S¸ucan et al., 2012). From
a wide pallet of algorithms that this library offers,
we have chosen Optimal Rapidly-Expanding Random
Trees (RRT*). The output of the algorithm is a set of
3D points that, if followed, lead from the start point
to the goal. Once the set is received, we generate
trajectories from path segments given by RRT*. To
that end, we employ a simple linear interpolation be-
tween two consecutive points that define a path seg-
ment, taking into account the copter speed limits.
To simulate a UGV in the Gazebo simulator, we
use the model of a holonomic vehicle, equipped with
4 omnidirectional wheels. The vehicle’s control ar-
chitecture is similar to the copter’s structure. On the
low level, we use 3 PID algorithms to control vehi-
cle’s lateral position, longitude position and heading.
The output of a generic pose sensor is used as feed-
back. The high level algorithms are basically identical
to the copter’s algorithms - the same coordination al-
gorithm with its own TÆMS structure is employed to
generate actions, the OMPL library and linear inter-
polation are used to generate trajectories in 2D and,
finally, an action server is used to connect the algo-
rithms.
The simulation of the use case scenario has been
executed on a single computer. However, these algo-
rithms and the software architecture allow for a com-
pletely decentralized implementation on several ded-
icated computers, which will be employed in the ex-
perimental verification of the system in a realistic lab-
oratory testbed.
5.2 Simulation Results
We have validated the complete system by running
extensive tests in a simulation testbed, shown in Fig.
1. The testbed offers several different possibilities of
how to reach the valve by the cooperative robotic sys-
tem from its initial point. To explore these possibil-
ities, we executed simulations with several different
sets of mission planning parameters. In particular, the
cost of copter’s and omnibot’s travelled unit distance
has been altered, which eventually resulted in differ-
ent mission schedules generated by the coordination
algorithm.
Figure 4: Results for mission planning parameters: E
UAV
=
15, E
UGV
= 1, E
0
UAV
= 150.
The most obvious solution is the one in which the
copter flies over the obstacles all the way from the
start point to the goal. Due to the simplicity of this
outcome, we omit the simulation results. The second
outcome, shown in Fig. 4, includes the copter landing
on the omnibot, followed by the omnibot driving and
carrying the copter all the way from the start to the
goal. This outcome is achieved for costs of regular
driving per unit distance of E
UAV
= 15, and E
UGV
= 1,
CanUAVandUGVBeBestBuddies?-TowardsHeterogeneousAerial-groundCooperativeRobotSystemforComplex
AerialManipulationTasks
243

0 5 10 15 20 25 30 35 40 45 50
2
1
0
1
t [s]
x [m]
omnibot
copt er
0 5 10 15 20 25 30 35 40 45 50
0
5
10
t [s]
y [m]
0 5 10 15 20 25 30 35 40 45 50
0.5
0
0.5
1
1.5
2
2.5
t [s]
z [m]
wait wait
go to val ve
wait
wait
go to val ve
grip
valve
wait
land on o mnibot
takeoff
Figure 5: Position of the copter and omnibot during the mis-
sion execution, in which the UGV carries the UAV all the
way to the valve.
Figure 6: Results for mission planning parameters: E
UAV
=
15, E
UGV
= 1, E
0
UAV
= 20.
and cost of flying with UGV of E
0
UAV
= 150. The
third outcome, shown in Fig. 6, is comprised of
the sequence in which the copter lands on the om-
nibot, the omnibot drives and carries the copter to the
front of the nearest obstacle, and the copter lifts and
carries the omnibot across the obstacle. Eventually,
the copter completes the mission by approaching the
valve and turning it. This outcome is achieved with
a decreased cost of carying UGV, E
0
UAV
= 20. Al-
though this outcome was achieved through parameter
tuning, a similar effect could be noted, if for instance
the distance between the pipeline and the valve would
increase.
To extend our simulation analysis, in Fig. 5 we
show the trajectories of both robotic units for the sec-
ond mission outcome. This is repeated in Fig. 7 for
the third outcome. Each figure is plotted with respect
to time, clearly marking specific time frames of the
mission (i.e. takeoff, grab valve, land on omnibot,
etc.).
Even though simulations show stable and ro-
bust coordination based on the specified criteria,
results can be further improved if we allow mission
rescheduling during execution, that would account for
100 110 120 130 140 150 160 170 180
0.2
0
0.2
0.4
0.6
0.8
1
t [s]
x [m]
omnibot
copter
100 110 120 130 140 150 160 170 180
2
0
2
4
6
8
10
12
t [s]
y [m]
100 110 120 130 140 150 160 170 180
0.5
0
0.5
1
1.5
2
2.5
t [s]
z [m]
takeoff
grip val ve
wait
wait
wait
wait
wait
go to th e
nearest ob stacle
land on o mn ibot
wait
carry om nibot
across o bstacle
go to val ve
Figure 7: Position of the copter and omnibot during the
mission execution, in which the UGV carries the UAV to
the front of the nearest obstacle on its way to the valve, the
UAV then lifts the UGV across the obstacle and finishes the
mission by turning the valve.
changes in the environment and more complex
sequences of behavior primitives.
6 CONCLUSION
In this paper we present the concept of a hetero-
geneous cooperative robotic system comprised of a
MMUAV and a holonomic UGV. The driving func-
tion for such a system design is the idea to utilize var-
ious capabilities of the MMUAV and UGV to com-
plete the mission of turning the valve with minimal
energy consumption in an imagined disaster stricken
environment. The model of the system and the sim-
ulation testbed are implemented in the Gazebo sim-
ulator using its ROS interface. The MMUAV and
UGV are controlled by a low-level cascade of PID
controllers. Furthermore, a mid-level navigation algo-
rithm generates obstacle-free trajectories in 3D space,
that are fed to the low level controllers. Finally, for
high level mission control, we utilize TÆMS frame-
work to specify a mission and its tasks in a hierar-
chical manner. We developed a decentralized coor-
dination algorithm, based on the GPGP framework,
whose two instances are executed - the first instance
gives commands to the MMUAV and the second in-
stance generates commands for the UGV. A negotia-
tion between these two instances is introduced which
ultimately gives a sequence of interconnected tasks
assigned to the MMUAV and UGV in a decentral-
ized fashion. Through extensive simulation tests we
have shown how different cost values, used in mission
planning phase, result in different mission schedules,
which all eventually lead to a successful execution of
the mission.
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
244

In the future work, we plan to experimentally val-
idate the system on a mockup laboratory testbed. Fur-
thermore, we will expand the robotic system with sev-
eral different UAVs and UGVs and deploy it to an un-
known environment to perform a set of complex tasks,
such as finding a gauge, simultaneously reading the
gauge and turning a valve to control the pressure of a
pipeline, finding and connecting an electric plug, etc.
ACKNOWLEDGEMENTS
This work was supported in part by the Air Force Re-
search Laboratory, under agreement number FA8655-
13-1-3055 and the European Community Seventh
Framework Program under grant No. 285939
(ACROSS). The U.S. Government is authorized to
reproduce and distribute reprints for Governmental
purposes not withstanding any copyright notation
thereon. The views and conclusions contained herein
are those of the authors and should not be interpreted
as necessarily representing the official policies or en-
dorsements, either expressed or implied, of the Air
Force Research Laboratory or the U.S. Government.
REFERENCES
Chen, W. and Decker, K. (2004). Managing multi-agent co-
ordination, planning, and scheduling. In Autonomous
Agents and Multiagent Systems, 2004. AAMAS 2004.
Proceedings of the Third International Joint Confer-
ence on, pages 1360–1361.
Ding, X. C., Kloetzer, M., Chen, Y., and Belta, C. (2011).
Automatic deployment of robotic teams. Robotics Au-
tomation Magazine, IEEE, 18(3):75–86.
Fumagalli, M., Naldi, R., Macchelli, A., Carloni, R.,
Stramigioli, S., and Marconi, L. (2012). Modeling and
control of a flying robot for contact inspection. In In-
telligent Robots and Systems (IROS), 2012 IEEE/RSJ
International Conference on, pages 3532–3537.
Fumagalli, M., Naldi, R., Macchelli, A., Forte, F., Keemink,
A., Stramigioli, S., Carloni, R., and Marconi, L.
(2014). Developing an aerial manipulator prototype:
Physical interaction with the environment. Robotics
Automation Magazine, IEEE, 21(3):41–50.
Jimenez-Cano, A., Martin, J., Heredia, G., Ollero, A., and
Cano, R. (2013). Control of an aerial robot with multi-
link arm for assembly tasks. In Robotics and Automa-
tion (ICRA), 2013 IEEE International Conference on,
pages 4916–4921.
Kim, S., Choi, S., and Kim, H. J. (2013). Aerial ma-
nipulation using a quadrotor with a two dof robotic
arm. In IEEE/RSJ International Conference on Intel-
ligent Robots and Systems, pages 4990 – 4995, Tokyo,
Japan.
Korchenko, A. and Illyash, O. (2013). The generalized clas-
sification of unmanned air vehicles. In Actual Prob-
lems of Unmanned Air Vehicles Developments Pro-
ceedings (APUAVD), pages 28–34. IEEE.
Korpela, C., Orsag, M., and Oh, P. (2014). Towards
valve turning using a dual-arm aerial manipulator. In
Intelligent Robots and Systems (IROS 2014), 2014
IEEE/RSJ International Conference on, pages 3411–
3416. IEEE.
Korpela, C., Orsag, M., Pekala, M., and Oh, P. (2013). Dy-
namic stability of a mobile manipulating unmanned
aerial vehicle. In IEEE International Conference on
Robotics and Automation, pages 4922–4927.
Lesser, V., Decker, K., Wagner, T., Carver, N., Garvey, A.,
Horling, B., Neiman, D., Podorozhny, R., Prasad, M.,
Raja, A., Vincent, R., Xuan, P., and Zhang, X. (2004).
Evolution of the gpgp/tms domain-independent coor-
dination framework. Autonomous Agents and Multi-
Agent Systems, 9(1-2):87–143.
Lindsey, Q., Mellinger, D., and Kumar, V. (2012). Con-
struction with quadrotor teams. Autonomous Robots,
33(3):323–336.
Miskovic, N., Bogdan, S., Nad, E., Mandic, F., Orsag, M.,
and Haus, T. (2014). Unmanned marsupial sea-air
system for object recovery. In Control and Automa-
tion (MED), 2014 22nd Mediterranean Conference of,
pages 740–745.
Orsag, M., Korpela, C., Bogdan, S., and Oh, P. (2014). Hy-
brid adaptive control for aerial manipulation. Journal
of Intelligent and Robotic Systems, 73(1-4):693–707.
Raman, V. (2014). Reactive switching protocols for multi-
robot high-level tasks. In Intelligent Robots and Sys-
tems (IROS 2014), 2014 IEEE/RSJ International Con-
ference on, pages 336–341.
Saha, I., Ramaithitima, R., Kumar, V., Pappas, G. J., and Se-
shia, S. A. (2014). Automated composition of motion
primitives for multi-robot systems from safe ltl spec-
ifications. In Proceedings of the IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems
(IROS).
Scholten, J., Fumagalli, M., Stramigioli, S., and Carloni, R.
(2013). Interaction control of an uav endowed with
a manipulator. In Robotics and Automation (ICRA),
2013 IEEE International Conference on, pages 4910–
4915.
Sreenath, K., Michael, N., and Kumar, V. (2013). Trajectory
generation and control of a quadrotor with a cable-
suspended load-a differentially-flat hybrid system. In
IEEE International Conference on Robotics and Au-
tomation, pages 4888–4895. IEEE.
S¸ucan, I. A., Moll, M., and Kavraki, L. E. (2012). The Open
Motion Planning Library. IEEE Robotics & Automa-
tion Magazine, 19(4):72–82.
Thomas, J., Loianno, G., Sreenath, K., and Kumar, V.
(2014). Toward image based visual servoing for aerial
grasping and perching. In IEEE International Confer-
ence on Robotics and Automation, pages 2113–2118.
Wurm, K., Dornhege, C., Nebel, B., Burgard, W., and
Stachniss, C. (2013). Coordinating heterogeneous
teams of robots using temporal symbolic planning.
Autonomous Robots, 34(4):277–294.
CanUAVandUGVBeBestBuddies?-TowardsHeterogeneousAerial-groundCooperativeRobotSystemforComplex
AerialManipulationTasks
245
