
Disaggregated Architecture for at Scale Computing
Chung-Sheng Li
1
,
Hubertus Franke
1
, Colin Parris
2
and Victor Chang
3
1
IBM Thomas J. Watson Research Center, Yorktown Heights, NY 10598, U.S.A.
2
GE Global Research Center, One Research Circle, Niskayuna, NY 12309, U.S.A.
3
School of Computing, Creative Technologies and Engineering, Leeds Beckett University, Leeds LS6 3QS, U.K.
Keywords: Disaggregated Datacenter Architecture, Software Defined Environments, Software Defined Networking.
Abstract: The rapid growth of cloud computing both in terms of the spectrum and volume of cloud workloads brought
many challenges to the traditional data center design - fast changing system configuration requirements due
to workload constraints, varying innovation cycles of system components, and maximal sharing of systems
and subsystems. In this paper, we developed a qualitative assessment of the opportunites and challenges for
leveraging disaggregated datacenter architecture to address these challenges. In particular, we compare and
contrast the programming models that can be used to access the disaggregated resources, and developed the
implications for the network and resource provisioning and management.
1 INTRODUCTION
Cloud computing is quickly becoming the fastest
growing platform for deploying enterprise, social,
mobile, and analytic workloads. As many of these
workloads grew to internet scale, they have ushered
a new era of datacenter scale computing on top of
the previous centralized and distributed computing
era (Barroso 2013). During the centralized
computing era, the computing resources are fully
shared (share everything) and centralized managed.
The subsequent distributed computing era allows
decentralized management of distributed resources
interconnected by networks. The “at scale”
computing era, in contrast, involves de facto
centralized management of massive amount of
distributed and often virtualized resources that are
locally concentrated within mega-datacenters and
often spread across multiple datacenters. Recently,
the need for increased agility and flexibility has
accelerated the introduction of software defined
environments (which include software defined
networking, storage, and compute) where the control
and management planes of these resources are
decoupled from the data planes so that they are no
longer vertically integrated as in traditional compute,
storage or switch systems and can be deployed
anywhere within a datacenter (Li et al., 2014).
The emerging at scale cloud data centers are
facing the following challenges: fast changing
system configuration requirements due to highly
Server
Data Center Network
Server
Storage
Storage
Figure 1: Traditional datacenter with servers and storage
interconnected by datacenter networks.
dynamic workload constraints, varying innovation
cycles of system components, and the need for
maximal sharing of systems and subsystems
resources in order to minimize the Capital
Expenditure (CAPEX) and Operational Expenditure
(OPEX) for efficient at scale operation. These
challenges are further elaborated below. Enabling
software and platform as a service with optimal
stack level cost performance has become a major
differentiator in the marketplace, especially for those
services involving massive scale out environment
such as Hadoop and Spark.
Systems in a cloud computing environment often
have to be configured differently in response to
different workload requirements. A traditional
datacenter, as shown in Fig. 1, includes servers and
storage interconnected by datacenter networks. A
45
Li C., Franke H., Parris C. and Chang V..
Disaggregated Architecture for at Scale Computing.
DOI: 10.5220/0005551300450052
In Proceedings of the 2nd International Workshop on Emerging Software as a Service and Analytics (ESaaSA-2015), pages 45-52
ISBN: 978-989-758-110-6
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
typical server system configured with only CPU and
memory while keeping the storage subsystem
(which also includes the storage controller and
storage cache) remote is likely to be applicable to
workloads which do not require large I/O bandwidth
and will only need to use the storage occasionally.
This configuration is usually inexpensive and
versatile - but unlikely to perform well when large
I/O bandwidth or small latency become pertinent.
Alternatively, the server can be configured with
large amount of local memory, SSD, and storage.
This configuration, however, is likely to become
expensive. Some of the system resources such as the
SSDs configured within the server could be
potentially underutilized at various times as
workloads may not always be able to fully utilize
them.
Traditional systems also impose identical
lifecycle for every component inside the system. As
a result, all of the components within a system
(whether it is a server, storage, or switches) are
replaced or upgraded at the same time. The
"synchronous" nature of replacing the whole system
at the same time prevents earlier adoption of newer
technology at the component level, whether it is
memory, SSD, GPU, or FPGA. The average refresh
cycle of CPUs is approximately 3-4 years, HDDs
and fans are around 5 years, battery backup (i.e.
UPS), RAM, and power supply are around 6 years.
Other components in a data center typically have a
lifetime of 10 years. Consequently, an integrated
system with CPU, memory, GPU, power supply,
fan, RAM, HDD, SSD likely has the same lifecycle
for everything within the system as replacing these
components individually will be uneconomical.
Traditional system resources (memory, storage,
and accelerators) configured for high throughput or
low latency usually could not share these resources
across the data center as they are only accessible
within the "system" they are in. As a result, the
utilization of the resources could be low. Those
resources configured as remote (or network
attached) allow maximal shareability but the
performance in terms of throughput and latency are
usually poor. As an example, challenges in terms of
operational efficiency and security in the cloud
based financial service domain were reported in
Chang (2014), where a pipelined cloud service
architecture is implemented on top of a traditional
datacenter architecture.
In this paper, we developed a qualitative
assessment of the approaches and challenges for
leveraging the disaggregated architecture for at scale
cloud datacenters. We compare and contrast the
programming models that can be used to access the
disaggregated resources. We also developed the
implications for the network and resource
provisioning and management. Based on this
qualitative assessment and early experimental results,
we concluded that disaggregated architecture with
appropriate programming models and resource
provisioning is likely to achieve improved
datacenter operating efficiency. This architecture is
particularly suitable for heterogeneous workload
environments as these environments often have
dynamic resource requirements and can benefit
from the improved elasticity of the physical resource
pooling offered by the disaggregated datacentre
architecture.
DatacenterNetwork
…
Storage
Devices
Shared GPUs
Shared Memory
Figure 2: Partially disaggregated datacentre with both
fully integrated server /storage as well as disaggregated
GPU, SSD, and memory pools.
2 COMPOSABLE SYSTEMS
ARCHITECTURE
The emerging disaggregated datacenter architecture
or datacenter as a computer (Lim et al, 2009), as
shown in Fig. 2, leverages the fast progress of the
networking capabilities, software defined
environments, and the increasing demand on high
utilization of computing resources in order to
achieve maximal efficiency.
On the networking front, the emerging trend is to
utilize a high throughput low latency network as the
“backplane” of the system. Such a system can vary
from rack, cluster of racks, PoDs, domains,
availability zones, regions, and multiple datacenters.
During the past 3 decades, the gap between the
backplane technologies (as represented by PCIe) and
network technologies (as represented by Ethernet) is
quickly shrinking. During the next 5 years, the
bandwidth gap between PCIe gen 4 (~250 Gb/s) and
100/400 GbE is becoming much less significant.
ESaaSA2015-WorkshoponEmergingSoftwareasaServiceandAnalytics
46
When the backplane speed is no longer much faster
than the network speed, many interesting
opportunities arise for refactoring systems and
subsystems as these system components are no
longer required to be in the same "box" in order to
maintain high system throughput. As the network
speeds become comparable to the backplane speeds,
SSD and storage which are locally connected
through a PCIe bus can now be connected through a
high speed network. This configuration allows
maximal amount of sharing and maximal amount of
flexibility to address the complete spectrum of
potential workloads. The broad deployment of
Software Defined Environments (SDE) within cloud
datacenters is facilitating the disaggregation among
the management planes, control planes, and data
planes within servers, switches and storage (Li et al,
2014).
Systems and subsystems within a composable
disaggregated data center are refactored so that these
subsystems can use the network "backplane" to
communicate with each other as a single system.
Composable system concept has already been
successfully applied to the network, storage and
server areas. In the networking area, physical
switches, routing tables, controllers, operating
systems, system management, and applications in
traditional switching systems are vertically
integrated within the same "box". Increasingly, the
newer generation switches logically and physically
separate the data planes (hardware switches and
routing tables) from the control planes (controller
and OS and applications) and management planes
(system and network management) and allow the
disaggregation of switching systems into these three
subsystems where the control and management
planes can reside anywhere within a data center,
while the data planes serve as the traditional role for
switching data. Similar to the networking area,
storage systems are taking a similar path. Those
monolithically integrated storage systems that
include HDDs, controllers, caches (including SSDs),
special function accelerators for compression and
encryption are transitioning into logically and
physically distinct data planes - JBOD (just a bunch
of drives), control planes (controllers, caches, SSDs)
and management planes.
A partially disaggregated memory architecture
was proposed by Lim et al (2009, 2012) in which
each disaggregated compute node retains a smaller
size of memory while the rest of the memory is
aggregated and shared remotely. When a compute
node requires more memory to perform a task, the
hypervisor integrates the local memory and the
remote shared memory to form a flat memory
address space for the task. During the run time,
accesses to remote addresses result in a hypervisor
trap and initiate the transfer of the entire page
through RDMA (Remote Direct Memory Access)
mechanism to the local memory. Their experimental
results show an average of ten times performance
benefit in a memory-constrained environment. A
detailed study of the impacts of network bandwidth
and latency of a disaggregated datacenter for
executing in memory workloads such as GraphLab,
MemcacheD and Pig was reported in Rumble et al.
(2011). When the remote memory is configured to
contain 75% of the working set, it was found that the
application level degradation was minimal (less than
10%) when network bandwidth is 40 Gb/s and the
latency is less than
s
10
(Han et al, 2013). Server
products based on a disaggregated architecture have
already appeared in the marketplace. These include
the Cisco UCS M-Series Modular Server, AMD
SeaMicro disaggregated architecture, and Intel Rack
Scale Architecture as part of the Open Compute
Project.
3 SOFTWARE STACK
Datacenter
Server 1
Server N
…
Storage
Devices
Shared
GPUs
Shared
Memory
Cloud
OS
Hypervisor
BareMetal
Application&
Figure 3: Software stack for accessing disaggregated
resources.
Disaggregated datacenter resources can be
accessed by application programming models
through different means and methods. We consider
three fundamental approaches here: (i) hardware
based, (ii) hypervisor/operating system based, and
(iii) middleware/application based.
The hardware based approach for accessing
disaggregated resources is transparent to
applications and the OS/hypervisor. Disaggregated
memory is mapped to the physical address space of a
compute node and is byte addressable across the
network. In this case, disaggregated memory is
DisaggregatedArchitectureforatScaleComputing
47

entirely transparent to the applications. While such
transparency is desirable, it forces a tight integration
at the memory subsystem either at the physical level
or the hypervisor level. At the physical level the
memory controller needs to be able to handle remote
memory accesses. To avoid the impact of long
memory access latencies, we expect that a large
cache system is required. Disaggregated GPU and
FPGA can be accessed as an I/O device based on
direct integration through PCIe over Ethernet.
Similar to disaggregated memory, the programming
models remain unchanged once the mapping of the
disaggregated resource to the I/O address space of
the local compute node.
In the second approach, the access of
disaggregated resources can be exposed at the
hypervisor/container/operating system levels. New
hypervisor level primitives - such as getMemory,
getGPU, getFPGA, etc. - need to be defined to allow
applications to explicitly request the provisioning
and management of these resources in a manner
similar to malloc. It is also possible to modify the
paging mechanism within the hypervisor/operatoring
systems so that the paging to HDD is now going
through a new memory hierarchy including
disaggregated memory, SSD, and HDD. In this
case, the application does not need to be modified at
all. Accessing remote Nvdia GPU through rCUDA
(Duato 2010) has been demonstrated, and has been
shown to actually outperform locally connected
GPU when there is appropriate network
connectivity.
Disaggregation details and resource remoteness
can also be directly exposed to applications.
Disaggregated resources can be exposed via high-
level APIs (e.g. put/get for memory). As an
example, it is possible to define GetMemory in the
form of Memory as a Service as one of the
Openstack service. The Openstack service sets up a
channel between the host and the memory pool
service through RDMA. Through GetMemory
service, the application can now explicitly control
which part of its address space is deemed remote and
therefore controls or is at least cognizant which
memory and application objects will be placed
remotely. In the case of GPU as a service, a new
service primitive GetGPU can be defined to locate
an available GPU from a GPU resource pool and
host from the host resource pool. The system
establishes the channel between the host and the
GPU through RDMA/PCIe and exposes the GPU
access to applications via a library or a virtual
device.
4 NETWORK CONSIDERATIONS
One of the primary challenges for a disaggregated
datacenter architecture is the latency incurred by the
network when accessing memory, SSD, GPU, and
FPGA from remote resource pools. The latency
sensitivity depends on how the disaggregated
resources are exposed to the programming models in
terms of direct hardware, hypervisor, or resource as
a service.
The most stringent requirement on the network
arises when disaggregated memory is mapped to the
address space of the compute node and is accessed
through the byte addressable approach. The total
access latency across the network cannot be
significantly larger than the typical access time of
DRAM – which is on the order of 75 ns. As a
result, silicon photonics and optical circuit switches
(OCS) are likely to be the only options to enable
memory disaggregation beyond a rack. Large caches
can reduce the impact of remote access. When the
block sizes are aligned with the page sizes of the
system, the remote memory can be managed as
extension of the virtual memory system of the local
hosts through the hypervisor and OS management.
In this configuration, local DRAM is used as a cache
for the remote memory, which is managed in page-
size blocks and can be moved via RDMA
operations.
Disaggregating GPU and FPGA are much less
demanding as each GPU and FPGA are likely to
have its local memory, and will often engage in
computations that last many microseconds or
milliseconds. So the predominant communication
mode between a compute node and disaggregated
GPU and FPGA resources is likely through bulk
data transfer. It has been shown by Reano et al.
(2013) that adequate bandwidth such as those
offered by RDMA at FDR data rate (56 Gb/s)
already demonstrated superior performance than a
locally connected GPU.
Current SSD technologies has a spectrum of
100K IOPS (or more) and ~100 us access latency.
Consequently, the access latency for non-buffered
SSD should be on the order of 10 us. This latency
may be achievable using conventional Top-of-the-
Rack (TOR) switch technologies if the
communication is limited to within a rack. A flat
network across a PoD or a datacenter with a two-tier
spine-leaf model or a single tier spline model is
required in order achieve less than 10 us latency if
the communication between the local hosts and the
disaggregated SSD resource pools are across a PoD
or a datacenter.
ESaaSA2015-WorkshoponEmergingSoftwareasaServiceandAnalytics
48

5 DISTRIBUTED RESOURCE
PROVISIONING
In a disaggregated datacenter with physical resource
pooling, it is essential that the physical resources are
requested and provisioned with minimum latency so
that the use of remote resources will not create a
serious performance bottleneck. In this section, we
will describe an approach based on distributed
scheduling with global shared state in conjunction
with predictive resource provisioning.
Resource provisioning and scheduling can be
carried out through a centralized, hierarchical, or
fully distributed approach. The centralized approach
is likely to achieve the optimal resource utilization,
but may result in a single point of failure and a
severe performance bottleneck. The hierarchical
approach, such as the one used in Mesos (Hindman,
2011), allows flexible addition of heterogeneous
schedulers for different classes of workloads to a
centralized scheduler. The centralized scheduler
allocates chunks of resources to the workload
specific scheduler, which in turn allocates resources
to individual tasks. However, this approach often
results in sub-optimal utilization. A fully distributed
approach with global shared state, such as the
Google Omega (Schwarzkopf, 2013) project, utilizes
an optimistic approach for resource scheduling.
This approach is likely to perform better as
compared to other approaches.
The mechanism for scheduling and provisioning
resources from disaggregated physical resource
pools starts with the requesting node establishing the
type and amount of resource required. As discussed
in the previous section, the amount of resource
required can be established explicitly by the
workload or implicitly as the current requesting node
runs out of resource locally. Once the request is
received, the resource provisioning engine will
identify one or more of the resource pools with
available resources, potentially based on the global
shared state, for provisioning resources. It will then
communicate with the resource manager of the
corresponding resource pool to reserve the actual
resource. The resource manager for each resource
pool commits the resource to the incoming request
and resolves the potential conflicts if multiple
requests for the same resource occur simultaneously.
Once the resource is reserved, the communication
between the requesting node and the resource can
then commence.
Due to the low latency requirement for
provisioning physical resources in a disaggregated
datacenter, it is likely that the resources will need to
be provisioned and reserved before the actual needs
from the workload arise rather than on demand.
This may require the resource scheduler to monitor
the history of the resource usage so that an accurate
workload dependent projection of the resource usage
can always be maintained.
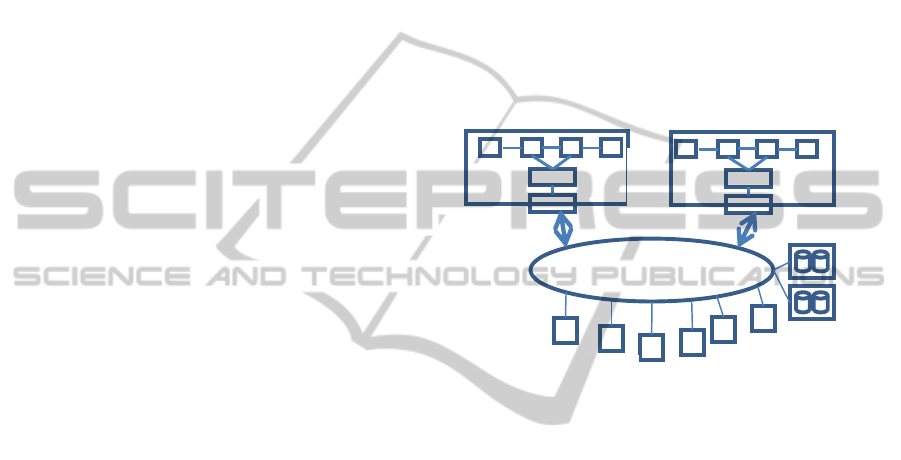
6 EXPERIMENTAL RESULTS
Figure 4: Experimental setup for performance
measurement in a disaggregated environment for
MemcacheD.
In this section, we describe experiments that
demonstrate the workload behavior when a cloud
centric application such as MemcacheD is deployed
in a disaggregated system environment. In this case,
part of client app data is in local DRAM, while the
rest is located in the memory of a remote node
accessed through an RDMA capable fabric via
Verbs API.
The disaggregated infrastructure, as shown in
Fig. 4, is entirely transparent to the MemcacheD
client. The server side is modified so that the data
accessed via key-value interface will be
automatically retrieved from either local or remote
memory.
The modification is as follows: A small program
on another machine allocates a specified amount of
memory and registers the allocation with the
Infiniband HCA. MemcacheD handshakes with the
remote server and obtains the pertinent information
such as remote buffer address and access_key.
After an initial handshake, it can now perform
RDMA reads and writes directly to the remote
buffer. The remote buffer is treated as a “victim
cache” and is maintained as an append-only log.
When MemcacheD runs out of local memory,
instead of evicting a key/value pair in the local
memory, it now does an RDMA write to the remote
memory. When looking up a particular key, it first
checks with the local memory (via a hash table). If
the key does not exist locally, MemcacheD checks
DisaggregatedArchitectureforatScaleComputing
49
the remote memory via a locally maintained hash
table. If key/value is in the remote memory, it reads
in this value through RDMA to a temporary local
buffer and sends it to the client. A particular
key/value is always either in local memory or
remote memory and can never resides in both
locations.
The experiments consist of 100,000 operations
(95% reads, 5% updates) with uniform random
accesses (i.e. no notion of working set as this
represents the most challenging situation) running in
a single thread.
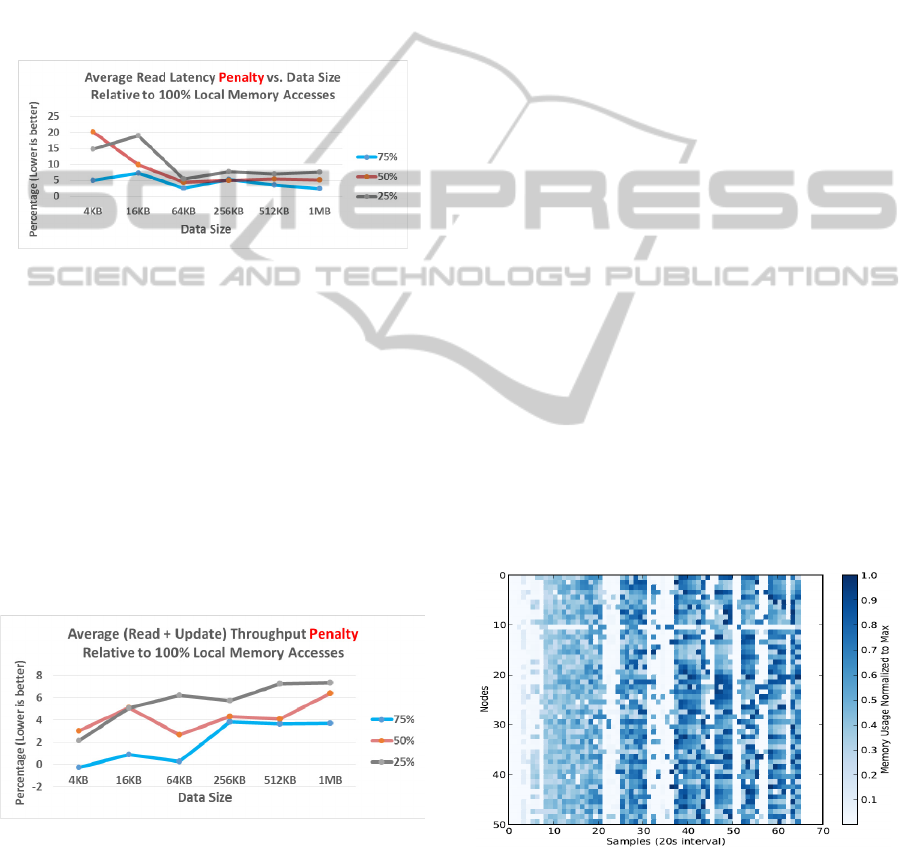
Figure 5: Average read latency penalty vs. data size with
respect to 100% local access when the local portion of
data varies from 75% to 25%
As shown in Fig. 5, higher percentage of local
data always introduces fewer penalties. However,
the difference begins to diminish among different
ratio of local vs. remote data when the data block
size is larger than 64 KB, as larger block size
reduces the overhead in the data transfer.
The second set of experiments consist of 100,000
read and update operations (95% reads, 5% updates)
with uniform random accesses (i.e. no notion of
working set as this represents the most challenging
situation) evenly split among 10 threads.
Figure 6: Average read/update throughput penalty vs. data
size with respect to 100% local access when the local
portion of data varies from 75% to 25%.
As shown in Fig. 6, the throughput penalty is nearly
nonexistent when 75% of the access is local and the
data size is 4KB. The penalty increases to 2% when
only 25% of the access is local. As the data sizes
increases, the transfer time of the entire page
between the local and the remote node increases,
resulting in higher penalty at 4% and 6%,
respectively, for 75% and 25% local access.
We can conclude from these experiments that
negligible latency and throughput penalty are
incurred for the read/update operations if these
operations are 75% local and the data size is 64 KB.
Smaller data size results in larger latency penalty
while larger data size results in larger throughput
penalty when the ratio of nonlocal operations is
increased to 50% and 75%.
In a second experiment we examine the popular
graph analytics platform Giraph, that enables
implementation of distributed graph algorithms. In
this particular case we populated a 50 node virtual
compute cluster with a randomly generated graph of
100 million vertices. The graph is partitioned into
50^2 partitions which are distributed across the
compute nodes. We then compute the
TopKPagerank properties of the graph. As the
computation progresses, messages need to be
exchanged to traverse the graph as it crosses node
boundaries. Dependent on the connectivity of the
graph, the variance in the message creation can
result in substantial different memory consumptions
per node. Under memory pressure, Giraph will swap
entire partitions and messages per vertex to disk
using LRU. We examine the memory utilization
across the nodes as computations progresses. While
cpu utilization is very uniform across all nodes and
across the execution of the program, memory
utilization varies considerable, which is shown as a
heatmap in Fig. 7.
Figure 7: Memory Consumption of Distributed Giraph
TopKPagerank application over time.
Analysis of this data reveals that the peak per node
memory usage versus the average per node memory
has a 2.78:1 ratio, where the aggregate memory
usage has a 1.68:1 ratio. We then reduce the per
ESaaSA2015-WorkshoponEmergingSoftwareasaServiceandAnalytics
50

node memory by a factor of 3 to explore the impact
of memory pressure, while the average per node
memory is maintained. This increases the overall
runtime of the experiment by a factor of 13.8x
highlighting that planning resource consumption for
best performance requires a memory
overprovisioning of a factor of three or alternatively
to pay a substantial performance penalty. When the
swap disk is on each node is configured to a
RamDisk, the overhead reduces to a factor of 6.14x -
which is still too high. Having observed the low
overheads of RDMA in the MemCacheD example,
we stipulate that sharing unused memory across the
entire compute cluster instead of through a swap
device to a remote memory location can further
reduce the overhead. However the rapid allocation
and deallocation of remote memory is imperative to
be effective.
Figure 8: Throughput improvement of disaggregated
storage for Cassandra workload.
Figure 9: Latency improvement of disaggregated storage
for Cassandra workload.
In our final experiment we examine the impact of
disaggregated storage. We utilized Cassandra, a
popular persistent, i.e disk backed, key value store.
In the traditional setup a single server is populated
with eight SATA disks that together form the block
storage for a ZFS filesystem on which the key value
pair storage resides. Ultimately the number of disks
in the server is limited to the order of 10s and the
SATA v3 bandwidth is limited to 6Gbps. In the
disaggregated setup we utilize 4 storage nodes with
eight disks each and access to Cassandra was over a
10Gbps Ethernet network. The ZFS cache was
limited and data was flushed out of the page cache to
ensure that almost all accesses go to disk. A client
consisting of 20 threads issued 10K operations (95%
read) uniformly accessing the data domain. The
bandwidth and latency improvement are shown in
Figures 8 and 9. Accessing blocks size of 256KB
and 512KB, we observed throughput improvements
of up to 195% and 79 % respectively for the
disaggregated system case. And latency
improvement was 67% and 51%. This experiment
substantiates our thesis that accessing data from
across multiple disks connected via Ethernet poses
less of a bandwidth restriction than SATA and thus
improves throughput and latency of data access and
obviates the need for data locality. Overall
disaggregated storage systems are cheaper to build,
manage and incrementally scale and offer higher
performance than traditional setups.
As more operations are moved to the shared
physical resource pools, it is conceivable that the
utilization of shared physical resources will
improve, resulting in reduced Capex and/or Opex.
7 CONCLUSIONS
The rapid growth of cloud computing workloads
both in terms of the spectrum and volume brought
many challenges to the traditional data center
design: (1) Fast changing system configuration
requirements due to workload constraints; (2)
Varying innovation cycles of system components;
(3) Maximal sharing of systems and subsystems in
order achieve optimal efficiency. The disaggregated
architecture provides a promising approach to
address these simultaneous challenges. Datacenters
based on this architecture allows the refactoring of
the datacenter for improved operating efficiency and
decoupled innovation cycles among components
while the datacenter network becomes the
"backplane"of the datacenter.
In this paper, we developed a qualitative
assessment of the approaches and challenges for
leveraging disaggregated architecture for at scale
cloud datacenters. In particular, we compare and
contrast the programming models that can be used to
access the disaggregated resources, the implications
for the network and resource provisioning and
management.. Based on this qualitative assessment
and early experimental results, we concluded that
disaggregated architecture with appropriate
programming models and resource provisioning is
likely to achieve improved datacentre operating
DisaggregatedArchitectureforatScaleComputing
51

efficiency for heterogeneous workload environments
that can benefit from the improved elasticity of
physical resources.
ACKNOWLEDGEMENTS
The authors are grateful for the Dr. Mukil Kesavan
for performing the experiments described in Section
6.
REFERENCES
Barroso, Luiz André, Jimmy Clidaras and Urs Hölzle.
(2013) The Datacenter as a Computer: An Introduction
to the Design of Warehouse-Scale Machines, Second
edition.
Chang, V. (2014). The business intelligence as a service in
the cloud. Future Generation Computer Systems, 37,
512-534.
Duato, J., Pena, A. J., Silla, F., Mayo, R., & Quintana-
Ortí, E. S. (2010, June). rCUDA: Reducing the
number of GPU-based accelerators in high
performance clusters. In High Performance
Computing and Simulation (HPCS), 2010
International Conference on (pp. 224-231). IEEE.
Han, S., N. Egi, A. Panda, S. Ratnasamy, G. Shi, and S.
Shenker, (2013) Network support for resource
disaggregation in next-generation datacenters. In Proc.
HotNets.
Herodotou, H., F. Dong and S. Babu. No one (cluster) size
fits all: automatic cluster sizing for data-intensive
analytics. In Proc. of the 2nd ACM Symposium on
Cloud Computing, 2011.
Hindman B., A. Konwinski, M. Zaharia, A. Ghodsi, A. D
Joseph, R. H Katz, S. Shenker, I. StoicaMesos (2011):
Mesos: A Platform for Fine-Grained Resource Sharing
in the Data Center. Proc. ACM USENIX Symposium
on Networked Systems Design & Implementation
(NSDI), 2011.
Krug, Perry, How Many Nodes? Part 1: An introduction to
sizing a Couchbase Server 2.0 cluster. http://
blog.couchbase.com/how-many-nodes-part-1-
introduction-sizing-couchbase-server-20-cluster.
Li, C.-S, B. L. Brech, S. Crowder, D. M. Dias, H. Franke,
M. Hogstrom, D. Lindquist, G. Pacifici, S. Pappe, B.
Rajaraman, J. Rao, R. P. Ratnaparkhi, R. A. Smith and
M. D. Williams. (2014) Software defined
environments: An introduction. In IBM Journal of
Research and Development Vol. 58 No. 2/3 pp. 1-11,
March/May.
Lim, K. Lim, J. Chang, T. Mudge, P. Ranganathan, S. K.
Reinhardt and T. F. Wenisch. (2009) Disaggregated
Memory for Expansion and Sharing in Blade Servers.
In Proc. ISCA.
Lim, K., Y. Turner, J. R. Santos, A. AuYoung, J. Chang,
P. Ranganathan and T. F. Wenisch. (2012) System-
level implications of disaggregated memory. In Proc.
HPCA.
Reano, C., R. May, E. S. Quintana-Orti, F. Silla, J. Duato,
A. J. Pena (2013), Influence of InfiniBand FDR on the
Performance of Remote GPU Virtualization, IEEE
International Conference on Cluster Computing
(CLUSTER), pp. 1-8.
Rumble, S. Rumble, D. Ongaro, R. Stutsman, M.
Rosenblum, and J. Ousterhout. (2011) It’s time for low
latency. In Proc. HotOS.
Schwarzkopf, M., Konwinski, A., Abd-El-Malek, M., &
Wilkes, J. (2013, April). Omega: flexible, scalable
schedulers for large compute clusters. In Proceedings
of the 8th ACM European Conference on Computer
Systems (pp. 351-364). ACM.
GraphLab. http://graphlab.com/
Memcached - a distributed memory object caching system.
http://memcached.org/
PigMix benchmark tool.http://cwiki.apache.org/
confluence/display/PIG/PigMix.
Cisco UCS M-Series Modular Servers.
http://www.cisco.com/c/en/us/products/servers-
unified-computing/ucs-m-series-modular-
servers/index.html.
AMD Disaggregates the Server, Defines New Hyperscale
Building Block. http://www.seamicro.com/sites/
default/files/MoorInsights.pdf.
SeaMicro Technology Overview. http://seamicro.com/
sites/default/files/SM_TO01_64_v2.5.pdf.
Intel, Facebook Collaborate on Future Datacenter Rack
Technologies, http://newsroom.intel.com/community/
intel_newsroom/blog/2013/01/16/intel-facebook-
collaborate-on-future-data-center-rack-technologies,
Jan. 2013.
Open Compute Project. http://www.opencompute.org.
ESaaSA2015-WorkshoponEmergingSoftwareasaServiceandAnalytics
52
