
Polarization Dependent Loss Emulator Built with Computer-driven
Polarization Controllers and Single Mode Fibre
Yangzi Liu, Peter Shepherd and Duncan Allsopp
Department of Electronic and Electrical Engineering, University of Bath, Bath, U.K.
Keywords:
Polarization Dependent Loss, Polarization Components Positioning.
Abstract:
In this paper, a polarization dependent loss emulator is designed with computer-driven polarization controllers
and single mode fibre. It proves that PDL obeys Maxwellian distribution when it is expressed in decibels. By
positioning the polarization controllers at different places in the emulator link, it also proves that positions of
PDL components have a significant effect on the statistics of PDL in a fixed length communication system.
As the number of polarization components involved and the communication fibre length remain as constants,
the longer the uninterrupted fibre is, the smaller the PDL mean value is produced.
1 INTRODUCTION
Optical fibre communication networks are playing an
important role in the area of high-speed, high-volume
and ultralong-distance data transmission. With the
growth in demand for greater data, greater bandwidth
has been applied, this has made polarization become
an effect which cannot be ignored in the system. For
example, polarization has been considered as a major
obstacle in the development of polarization-division-
multiplexing digital coherent transmission systems
when it is operating at more than 100Gb/s (Mori et al.,
2011). Polarization happens because of the asym-
metry of optical fibre factors on the two orthogonal
axes, such as the asymmetry of dispersion parameters
which introduce polarization mode dispersion and the
asymmetry of loss parameters which introduce polar-
ization dependent loss. In the effect of polarization,
signals in the optical fibre transmission systems will
be distorted by a bigger bit error rate, and a lower
signal-to-noise ratio.
As the optical pulse becomes narrower, polariza-
tion impairs transmission signals in two ways. Polar-
ization mode dispersion (PMD) can cause the signal
distortion due to the differential group delay (DGD)
on the two perpendicular axes in the fibre, and polar-
ization dependent loss (PDL) can introduce additional
loss because of the difference of loss factor of the two
perpendicular axes in the fibre. Moreover, PMD and
PDL always exist together in real optical transmission
systems, which generates combined effects. For ex-
ample, due to the loss of orthogonality between the
two principal states of polarization, PDL distorts the
statistics results of PMD away from the theoretical
distribution (Musara et al., 2013).
Even though PDL is limited to a relatively small
value in the latest produced fibre (about 0.02dB/km
at 1550 nm), its time-dependent randomness makes it
a factor of reducing signal-to-noise ratio which can-
not be ignored (Lichtman, 1995), especially in those
old deployed fibre communication systems. In order
to improve the performance of a long-distance opti-
cal transmission system, it is significant to deploy a
proper number of polarization dependent amplifiers
in the proper positions. To achieve this target, a reli-
able PDL emulator is essential.
In this paper, a PDL emulator is built with
computer-driven polarization controllers and sections
of single mode fibre. It is aimed to provide a continu-
ous statistical result which obeys the Maxwellian dis-
tribution, as concluded by previous researchers. An-
other goal of building this emulator is to find out how
the PDL components work with communication fi-
bres. To achieve this, the fibre length of this emu-
lator is fixed to a constant length (7×15 metres) and
two polarization controllers are used to provide ran-
dom states of polarization. One of the controllers is
constantly deployed between the laser source and the
first link of fibre and the other one is deployed at dif-
ferent places in the emulator in different cases. The
results are used to compare how the statistical results
are affected by the position changes of the second po-
larization controller.
42
Liu Y., Shepherd P. and Allsopp D..
Polarization Dependent Loss Emulator Built with Computer-driven Polarization Controllers and Single Mode Fibre.
DOI: 10.5220/0005563700420047
In Proceedings of the 6th International Conference on Optical Communication Systems (OPTICS-2015), pages 42-47
ISBN: 978-989-758-116-8
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

2 POLARIZATION DEPENDENT
LOSS (PDL)
2.1 Definition
Polarization dependent loss is a measure of the peak-
to-peak difference in transmission of an optical com-
ponent or system with respect to all possible states of
polarization. It is defined as the ratio of the maximum
and the minimum transmission of an optical device
with respect to all polarization states, as shown in Eq.
(1)
PDL
dB
= 10 ×log(
P
Max
P
Min
) (1)
In Stokes space, a polarized light beam can
be written in the form of Stoke vector
~
S =
(S
0
,S
1
,S
2
,S
3
)
T
, where
S
0
= I
S
1
= I p cos 2ψ cos 2χ
S
2
= I p sin 2ψ cos 2χ
S
3
= I p sin 2χ
Here I p, 2ψ and 2χ are the spherical coordinates in
Stokes space, so the Stoke vector
~
S can present any
polarization state of the polarized light beam.
After passing through a device which changed the
state of polarization, the Stoke vector of this light
beam can be described as
~
S
out
= M
~
S where M is the
Muller Matrix used to describe the polarization device
M =
m
11
m
12
m
13
m
14
m
21
m
22
m
23
m
24
m
31
m
32
m
33
m
34
m
41
m
42
m
43
m
44
The output power of this light beam
P
out
= m
11
S
0
+ m
12
S
1
+ m
13
S
2
+ m
14
S
3
(2)
By the definition of Stokes vector, there is
S
2
0
= S
2
1
+ S
2
2
+ S
2
3
(3)
and P
out
can come to the extrema with the condition of
m
12
S
1
=
m
13
S
2
=
m
14
S
3
= k. Maximum or minimum values
are achieved respectively when k is positive or nega-
tive. Therefore, Eq. (1) can be rewritten as
PDL
dB
= 10 ×log(
m
11
+
q
m
2
12
+ m
2
13
+ m
2
14
m
11
−
q
m
2
12
+ m
2
13
+ m
2
14
) (4)
2.2 The Statistical Theory
As polarization is a time-dependent element in trans-
mission systems, PDL plays its role as a random
attenuator. It generates irregularities in the power
evolution along the link and may cause a significant
degradation in the optical signal-to-noise ratio. Previ-
ous research showed that for all the relevant range of
parameters the PDL of a communication system has
Maxwellian distribution when it is expressed in deci-
bels.
Even though the distribution of PMD obeys
Maxwellian distribution as well, the distribution of
PDL is independent of the system’s PMD (Mecozzi
and Shtaif, 2002). The dependence of the mean-
square PDL (in decibels) on system length is linear
in most cases, but it may become exponential in sys-
tems extending over transoceanic lengths.
The polarization dependent component of the
power gain of a generic optical element can be de-
scribed as 1 +
~
Γ ·
~
S
0
, where
~
S
0
is a unit Stokes vec-
tor corresponding to the polarization state of the inci-
dent optical field and
~
Γ represents the vector of PDL.
Therefore, the highest and lowest gains are 1 ±Γ
with Γ = |
~
Γ| and the high gain is achieved when
~
S
0
is parallel to
~
Γ in Stokes space, and the lowest gain
is achieved when
~
S
0
is anti-parallel to
~
Γ. Based on
the definition of PDL, it can be described as PDL ≡
10log
10
[(1 + Γ)/(1 −Γ)]. In order to derive the PDL
distribution, the evolution equation of
~
Γ obtained by
Huttner (Huttner et al., 2000) is considered.
∂
~
Γ
∂z
=
~
β ×
~
Γ +
~
α −
~
Γ(
~
α ·
~
Γ). (5)
The vector
~
β(ω,z) is the local birefringence and α(z)
is the local vector of polarization dependent loss. ω
is the optical frequency and z is the position along the
fibre link.
By considering the transmission system as con-
sisting of a large number of elements that contribute
to PDL in a statistically independent way, it can be
assumed that PDL vectors of the individual elements
are Gaussian vectors in Stokes space so that their ori-
entation is uniformly distributed. Therefore, the first
term on the right hand side of Eq. (5) can be omit-
ted. It is arbitrary to assume that the local PDL vec-
tors have Gaussian distributed components. However,
it becomes irrelevant when the number of PDL ele-
ments in the system is large enough (Poole and Nagel,
1997). Now the PDL vector can be described as an
individual element by ηd
~
W , where d
~
W is an incre-
ment of a standard three-dimensional Brownian mo-
tion (Gardiner, 1985) and its most relevant property
is d
~
W ·d
~
W = dz. Therefore, the mean-square value
PolarizationDependentLossEmulatorBuiltwithComputer-drivenPolarizationControllersandSingleModeFibre
43

of the local PDL element is η
2
dz where η is a con-
stant. To simplify the notation, the position parame-
ter z can be normalized such that η
2
= 1. The nor-
malized z should be interpreted as the accumulated
sum of mean-square PDL values from the system in-
put (where z = 0) to any given point along the link.
With these assumptions, Eq. (5) can be rewritten in a
stochastic differential form
d
~
Γ = d
~
W −
~
Γ(d
~
W ·
~
Γ) −
1
3
~
Γ(2 −Γ
2
)dz (6)
where the last term is the byproduct of translating a
physical differential equation such as Eq. (5) into a
stochastic differential equation. With the relation be-
tween
~
Γ and ρ, the stochastic equation for ρ can be
written as
dρ =
γ/3
tanh(ρ/γ)
dz +
γ
√
3
dW (7)
where ρ ≡20/ln(10) w 8.7 and the scalar dW is an in-
crement of a one-dimensional Brownian motion satis-
fying dW
2
= dz. A new vector process
~
ρ(z) in Stokes
space is introduced to obtain the distribution of ρ,
such as
d
~
ρ = [
ρ/γ
tanh(ρ/γ)
−1]
~
ρ
3ρ
2
γ
2
dz + γd
~
W (8)
and it has the relation ρ = |
~
ρ|. It shows the stochastic
equation for
p
~
ρ ·
~
ρ is identical to Eq. (7). While
~
ρ
has no obvious physical interpretation, it is useful for
deriving the distribution of ρ, because Eq. (8) can
be approximated by performing a Taylor expansion
of the first term on its right-hand side
d
~
ρ = [1 −
1
15γ
2
ρ
2
+
2
315γ
4
ρ
4
···]
1
9
~
ρdz + γd
~
W (9)
If the first term in the square brackets in Eq. (9) is
considered, a linear equation is obtained , whose solu-
tion is a random vector with three independent Gaus-
sian components of zero mean and variance σ(z)
2
=
3γ
2
/2(e
2z/9
−1). Therefore, the distribution of ρ is
Maxwellian and it is given by
P
z
(ρ) =
4ρ
2
√
π[2σ
2
(z)]
3/2
exp[−
ρ
2
2σ
2
(z)
] (10)
The above approximation should be valid as long
as the second term in the expansion is significantly
smaller than one (i.e., ρ
2
15γ
2
), a condition that
is well satisfied for values of ρ 34 dB. The mean-
square value of the PDL is
hρ
2
i = 3σ(z)
2
=
9γ
2
2
(e
2z/9
−1) (11)
and the mean PDL is given by hρi =
p
8hρ
2
i/(3π),
a relation that is defined by the Maxwellian distri-
bution. Eq. (11) can be approximately written as
hρ
2
i w γ
2
z when 2z/9 1, where z is the accumu-
lated local mean-square PDL of the system.
Eq. (11) shows that the mean PDL exponentially
increases along the fibre for long distance transmis-
sion but it can be seen as approximately linear when
the distance is small enough.
2.3 Effect in Long Distance
Transmission Systems
The PDL factor in modern built single mode fibre is
about 0.02dB/km at the wavelength of 1550nm which
is relatively small (standard attenuation in the same
kind of single mode fibre is about 0.2dB/km) and its
increase is approximately linear. However, the mean
value of PDL increases exponentially with distance
increasing in a ultralong-distance system, for exam-
ple, hundreds or thousands of kilometres. This can be
even worse in the old systems which were deployed
decades ago.
PDL will affect ultralong-distance systems in an-
other way. It can cause a significant degradation in
the optical signal-to-noise ratio because it is randomly
changing with time. In order to compensate PDL,
polarization dependent amplifiers (fibre-based Raman
amplifiers) are applied along the systems. In order
to achieve a better performance, the polarization de-
pendent amplifiers (PDA) are expected to have the
Maxwellian distribution related to the distribution of
PDL in the system. Therefore, it is significant to un-
derstand the relationship between polarization com-
ponents and communication fibres, not only the work-
ing parameters, but also the optimum positions of po-
larization components.
When the PDL is significant, there is interaction
between PMD and PDL and that caused some com-
bined effects. In the presence of both PMD and
PDL, the two states of polarization are not orthogonal,
which leads to interferences producing anomalously
large pulse spreading (Gisin and Huttner, 1997).
3 EMULATOR DESIGN
The PDL emulator described in this paper is de-
signed with computer-drived polarization controllers
connected with sections of single mode fibre. Polar-
ization controllers can provide random states of po-
larization in time to simulate and enhance the PDL
variation in the real situation, and they are connected
with single mode fibre, which is used as the device
under test (DUT).
A stable laser source is used to provide continu-
ous lightwave at the wavelength of 1550 nm. A power
OPTICS2015-InternationalConferenceonOpticalCommunicationSystems
44
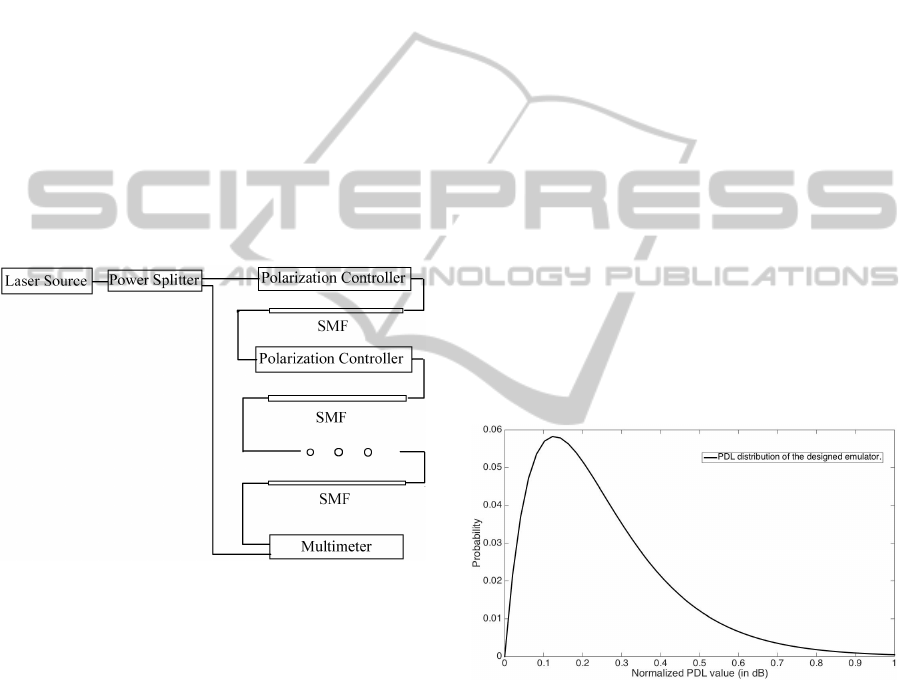
splitter is deployed between the laser source and the
system. 10% of the source power is sent to one chan-
nel of the multimeter as reference, and the other 90%
goes into the emulator.
The sections of single mode fibre which are used
to connect each polarization controllers are 15 metres
long, as shown in Figure 1. All of the polarization
controllers are changing their paddle positions rapidly
and randomly to maximize the system randomization.
The system randomness is relative to the number
of polarization controllers applied. By changing this
it can be compared how PDL components in the trans-
mission system affect the statistical results of the out-
put PDL at the receiver. By changing the number of
sections of optical fibre, it will give different results
corresponding to the different transmission distance.
Another variable in the emulator system is the posi-
tions of polarization controllers. By changing this, it
can be helpful to find out the effect of PDL compo-
nent position changing and the relationship of PDL
component position and the transmission distance.
Figure 1: Emulator design.
By using the Stokes vector and Muller Matrix
which are discussed in Section 2.2, the emulator can
be described mathematically as
~
S
out
= F
n
...F
p+2
F
p+1
M
2
F
p
...F
2
F
1
M
1
~
S (12)
where M
1
and M
2
represent the polarization con-
trollers and F
1
,F
2
,...F
n
represent the sections of sin-
gle mode fibre. M
1
and M
2
generate random states
of polarization to optimum the measurement results.
By assuming the states of polarization do not change
within the relative short distance (15 metres), the
Muller Matrix of fibre can be written as
F
1
= F
2
= ...F
n
=
exp(−αL) 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
(13)
where α is the loss parameter of the fibre and L is the
length of fibre. By combining the Muller Matrices
of coherent sections of fibres, Eq. (12) can be also
written as
~
S
out
= F
n−t
M
2
F
t
M
1
~
S (14)
where
F
t
=
exp(−αpL) 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
F
t
=
exp(−α(n − p)L) 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
4 EXPERIMENTAL RESULTS
As described in the theoretical calculation, the statisti-
cal result of PDL obeys the Maxwellian distribution.
In order to check whether the statistical distribution
matches the theoretical calculation, the emulator runs
for 24 hours continuously to generate a statistical re-
sult, which is shown in Fig. 2. The probability curve
indicates that the result obeys Maxwellian distribu-
tion, which means the emulation results generated by
this emulator is reliable to be used to study polariza-
tion dependent loss in a laboratory environment.
Figure 2: The statistical result of the designed emulator
obeys Maxwellian distribution.
Based on Eq. (8), the mean-square value of the
PDL ρ
2
exponentially increases as the communica-
tion length increases. However, even if the commu-
nication distance is fixed to a constant, the statistical
results in the system varies. By assuming the commu-
nication fibre is in a constant of state of polarization,
the main factor which varies the statistical results is
the PDL components.
The PDL components statistically vary the results
in two ways. Their random patterns change as their
working environment changes in time. On the other
hand, the positions where the PDL components were
PolarizationDependentLossEmulatorBuiltwithComputer-drivenPolarizationControllersandSingleModeFibre
45
deployed in the systems can lead to different results
as the combination of PDL component and the fi-
bre length is changed. In order to study the relation-
ship between the statistical results and the position of
PDL components, the emulator is set in seven differ-
ent cases (shown in Table 1). Polarization controller 1
is fixed between the laser source and the first section
of fibre to provide an initial state of polarization and
polarization controller 2 is deployed in different posi-
tions in different cases. Fibre length of each section
is 15 metres.
Table 1: Case list of the different sets of emulator. PC1
and PC2 indicate polarization controller 1 and polarization
controller 2 respectively, SMF indicates single mode fibre.
Case 1 PC 1−→ PC 2−→7 sections of SMF
Case 2 PC 1−→ 1 section of SMF−→PC 2−→6 sections of SMF
Case 3 PC 1−→ 2 sections of SMF−→PC 2−→5 sections of SMF
Case 4 PC 1−→ 3 sections of SMF−→PC 2−→4 sections of SMF
Case 5 PC 1−→ 4 sections of SMF−→PC 2−→3 sections of SMF
Case 6 PC 1−→ 5 sections of SMF−→PC 2−→2 sections of SMF
Case 7 PC 1−→ 6 sections of SMF−→PC 2−→1 section of SMF
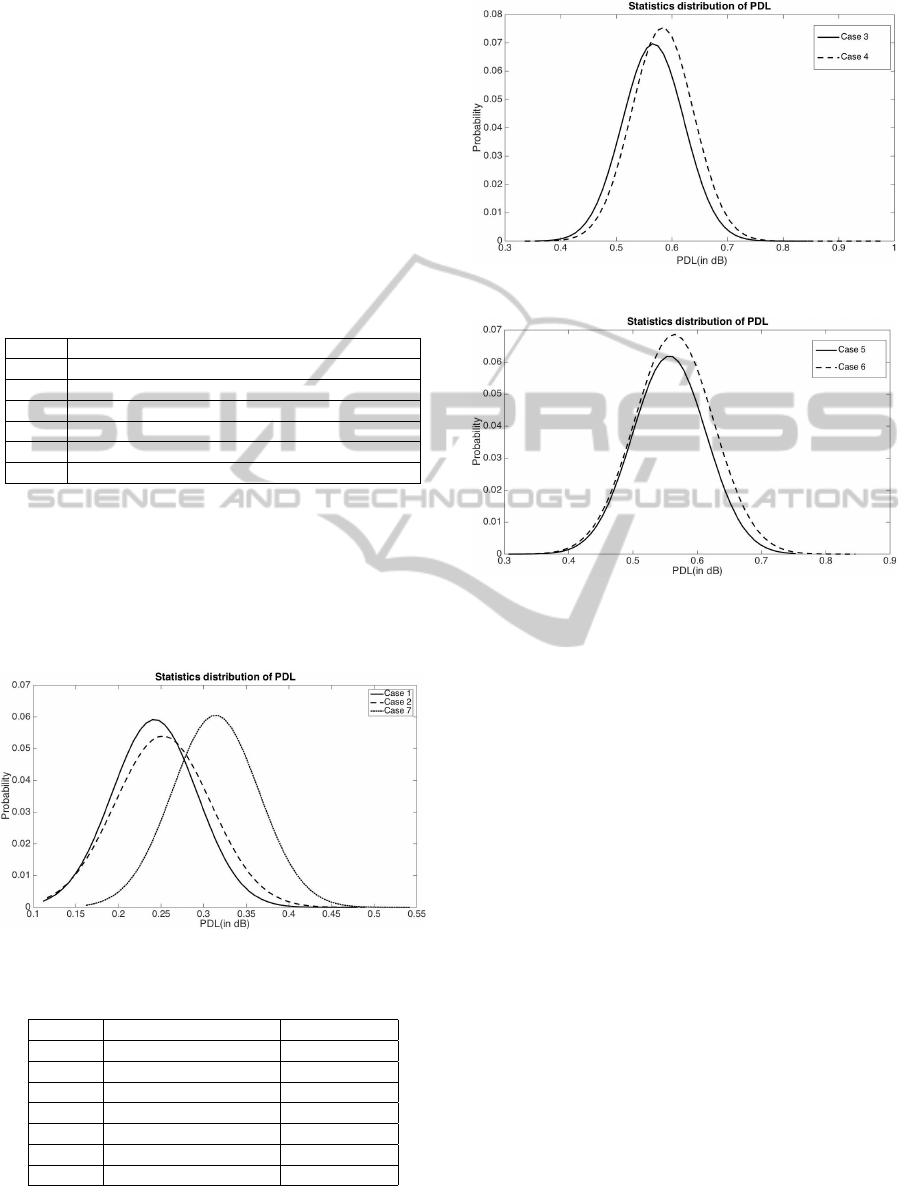
The emulator runs continuously for 24 hours as
one experimental period. Measurements were taken
multiple times in each case to achieve a better statis-
tical result. Figure 3, 4 and 5 show the distribution
curve of PDL in all of the cases and Table 2 shows
the mean value and variance of measured PDL in all
of the cases.
Figure 3: Statistical results of emulator(Case 1,2 and 7).
Table 2: Mean value and Variance of PDL in different cases.
Case No. Mean value of PDL (in dB) Variance of PDL
Case 1 0.2424 0.0025
Case 2 0.2522 0.0032
Case 3 0.5665 0.0031
Case 4 0.5831 0.0044
Case 5 0.5568 0.0033
Case 6 0.5639 0.0038
Case 7 0.3139 0.0026
As shown, when the fibre length is fixed, a con-
tinuous fibre link without any change of state of po-
Figure 4: Statistical results of emulator(Case 3 and 4).
Figure 5: Statistical results of emulator(Case 5 and 6).
larization can generate a smaller mean value of PDL
in statistics, such as Case 1,2 and 7. Inserting PDL
components can significantly enlarge the mean value
of PDL, even though the total length and total number
of PDL components remain the same.
5 CONCLUSIONS AND FUTURE
WORK
In this paper, a PDL emulator built with computer-
driven polarization controllers and sections of single
mode fibre is shown. Measurement results show that
the PDL statistics obeys Maxwellian distribution.
With this emulator, it is proved that the locations of
PDL components (such as polarization dependent
gain components) affect the statistics significantly
even though the total fibre length and the total number
of PDL components are fixed.
In order to develop the study of PDL emulator
positioning, more polarization controllers will be
involved in the future work. A mathematical model
will be developed for calculating the optimum posi-
tion where essential polarization components should
be deployed to minimize the PDL in the system.
OPTICS2015-InternationalConferenceonOpticalCommunicationSystems
46

REFERENCES
Gardiner, C. (1985). Stochastic methods. Springer-Verlag,
Berlin–Heidelberg–New York–Tokyo.
Gisin, N. and Huttner, B. (1997). Combined effects of
polarization mode dispersion and polarization depen-
dent losses in optical fibers. Optics Communications,
142(1):119–125.
Huttner, B., Geiser, C., and Gisin, N. (2000). Polarization-
induced distortions in optical fiber networks with
polarization-mode dispersion and polarization-
dependent losses. Selected Topics in Quantum
Electronics, IEEE Journal of, 6(2):317–329.
Lichtman, E. (1995). Limitations imposed by polarization-
dependent gain and loss on all-optical ultralong com-
munication systems. Lightwave Technology, Journal
of, 13(5):906–913.
Mecozzi, A. and Shtaif, M. (2002). The statistics of
polarization-dependent loss in optical communica-
tion systems. Photonics Technology Letters, IEEE,
14(3):313–315.
Mori, K., Kataoka, T., Kobayashi, T., and Kawai, S.
(2011). Statistics and performance under combined
impairments induced by polarization-dependent-loss
in polarization-division-multiplexing digital coherent
transmission. Optics express, 19(26):B673–B680.
Musara, V., Ireeta, W. T., Wu, L., and Leitch, A. W.
(2013). Polarization dependent loss complications
on polarization mode dispersion emulation. Optik-
International Journal for Light and Electron Optics,
124(18):3774–3776.
Poole, C. D. and Nagel, J. (1997). Polarization effects in
lightwave systems. Optical Fiber Telecommunications
IIIA, pages 114–161.
PolarizationDependentLossEmulatorBuiltwithComputer-drivenPolarizationControllersandSingleModeFibre
47
