
Adaptive 3-D Object Classification with Reinforcement Learning
Jens Garstka and Gabriele Peters
Human-Computer Interaction, Faculty of Mathematics and Computer Science, University of Hagen,
D-58084, Hagen, Germany
Keywords:
3-D Object Classification, Reinforcement Learning.
Abstract:
We propose an adaptive approach to 3-D object classification. In this approach appropriate 3-D feature de-
scriptor algorithms for 3-D point clouds are selected via reinforcement learning depending on properties of the
objects to be classified. This approach is supposed to be able to learn strategies for an advantageous selection
of 3-D point cloud descriptor algorithms in an autonomous and adaptive way, and thus is supposed to yield
higher object classification rates in unfamiliar environments than any of the single algorithms alone. In addi-
tion, we expect our approach to be able to adapt to subsequently added 3-D feature descriptor algorithms as
well as to autonomously learn new object categories when encountered in the environment without further user
assistance. We describe the 3-D object classification pipeline based on local 3-D features and its integration
into the reinforcement learning environment.
1 MOTIVATION
In the field of human-robot interaction it is essential
for an interactive system to recognize and classify ob-
jects in its environment. A number of 3-D object clas-
sification methods exist, which are successful in de-
fined contexts such as scene understanding, naviga-
tion, or applications in robotics like grasping or ma-
nipulation. But none of them is flexible enough to sat-
isfy the needs for arbitrary environments or in several
different applications or contexts. At the same time
in the field of machine learning approaches have been
developed that are able to adapt to dynamic changes
in environments and to learn behavioral strategies au-
tonomously. One of these approaches is represented
by methods of reinforcement learning. It seems rea-
sonable to overcome some of the inflexibilities of
state-of-the-art 3-D object classification methods by
an appropriate fusion with an reinforcement learning
approach.
There are different ways, how 3-D objects can be
recognized and classified, e. g., by direct matching of
global 3-D point cloud descriptions, pairwise match-
ing of local descriptions with clustering, or dictio-
nary based approaches, where local descriptions are
summarized in histograms, before they are compared.
Over the years local 3-D feature descriptor algorithms
have emerged as the most promising means to com-
pare 3-D point clouds.
In the present work we will focus only on lo-
cal 3-D feature descriptor algorithms for point clouds
without additional structural information like trian-
gle meshes and surfaces. These local 3-D feature de-
scriptor algorithms differ considerably with respect to
recognition rates and computation times. However,
in general the computational costs of calculation and
comparison for local feature descriptors are high. A
comparison of recent algorithms (Alexandre, 2012)
and a survey of local feature based approaches for 3-D
object recognition (Guo et al., 2014) show, that there
is not a single best algorithm in the domain of 3-D
object recognition and classification for all purposes.
This raises the question which descriptors should be
used in which cases. Furthermore, the question arises
whether a combination of two or more different algo-
rithms leads to better results.
This proposal provides a concept which may of-
fer answers to these questions. We present a method,
where we use reinforcement learning to learn se-
quences of 3-D point cloud descriptors to obtain high
classification rates. Section 2 gives a short overview
over the required components and section 3 describes
our approach in detail.
381
Garstka J. and Peters G..
Adaptive 3-D Object Classification with Reinforcement Learning.
DOI: 10.5220/0005563803810385
In Proceedings of the 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2015), pages 381-385
ISBN: 978-989-758-123-6
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

2 RELATED WORK
2.1 Reinforcement Learning
In general, reinforcement learning (Sutton and Barto,
1998) describes a class of machine learning algo-
rithms, in which an agent tries to achieve a goal by
trial and error. The agent acts in an environment and
learns to choose optimal actions in each state of the
environment. The strategy of chosen actions is called
policy. Further, it is assumed that the goals of the
agent can be defined by a reward function that assigns
a numerical value to each distinct action the agent
may take in each distinct state of the environment. In
this environment the task of the agent is to choose and
apply one of the available actions in the current state.
This changes the environment which leads the agent
to the next state, and the agent can observe the con-
sequences (the immediate reward). While repeating
these steps the reinforcement learning agent can learn
a policy. Typically, it is desired to find a policy that
maximizes the accumulated reward.
Watkins (Watkins, 1989) introduced a reinforce-
ment learning algorithm called Q-learning. In his
method the agent exists within a world that can be
modeled as a Markov Decision Process, consisting of
a finite number of states and actions. In each step
the agent performs one of the available actions, ob-
serves the new state, and receives the reward. This
reward and the expected future reward result in the
so-called quality-value (q-value). With ongoing iter-
ations all q-values for each possible state-action pair
will be approximated. Watkins and Dayan (Watkins
and Dayan, 1992) proved that the discrete case of Q-
learning will converge to an optimal policy under cer-
tain conditions. A series of survey articles of rein-
forcement learning methods is collected in (Wiering
and Van Otterlo, 2012).
2.2 3-D Keypoint Detectors
3-D keypoint detectors are essential for local 3-D fea-
ture based approaches. They reduce the computa-
tional complexity by identifying those regions of 3-D
point clouds, which are interesting for descriptors in
terms of high informational density. There has been
a lot of research in this field in the last few years.
A good overview of keypoint detector performances
is provided in the comparative evaluations of Salti
et al. (Salti et al., 2011) and Filipe and Alexandre
(Filipe and Alexandre, 2013). Additionally, there is
an overview of the available 3-D keypoint detection
algorithms in (Guo et al., 2014). For our approach,
we will choose the intrinsic shape signatures (Zhong,
2009) based on the results of Salti et al. and Felipe
and Alexandre, where it yielded best results in terms
of repeatability.
2.3 Local 3-D Feature Descriptors
The number of published local 3-D feature descrip-
tor algorithms has grown considerably in the last
few year. But there are two mentionable early ap-
proaches, the splash (Stein and Medioni, 1992) and
the widely used spin image (Johnson and Hebert,
1998). These two methods stand for numerous sub-
sequently developed algorithms that can be grouped
into two categories: signature and histogram based
methods. Alexandre and Gou et al. (Alexandre, 2012;
Guo et al., 2014) provide extensive comparisons of
state of the art local 3-D feature descriptor algorithms.
The methods that we will use for an initial implemen-
tation will be the spin images, the 3-D shape con-
text (3DSC) (Frome et al., 2004), the persistent fea-
ture histogram (PFH) (Rusu et al., 2008), the fast
point feature histogram (FPFH) (Rusu et al., 2009),
the unique signatures of histograms (USC) (Tombari
et al., 2010b), and the unique shape context (SHOT)
(Tombari et al., 2010a).
2.4 Classification
As already mentioned, there are different ways to
match local 3-D features of an unknown object under
inspection against previously experienced features.
For our approach, it is assumed that the existing point
clouds have already been segmented. Thus, the local
feature descriptions can be used directly for classifi-
cation without a previous clustering (hypothesis gen-
eration). In this case bag-of-words models with quan-
tized local descriptors as used in recent classifica-
tion pipelines (Toldo et al., 2010; Wu and Lin, 2011;
Cholewa and Sporysz, 2014) can easily be used. In
these pipelines a directory of keywords (quantized
feature descriptions) is determined by clustering. By
filling the keywords found with a nearest neighbor
search for all local 3-D feature descriptions into a his-
togram, the number of each occurrence is counted. Fi-
nally, these histograms for an object can be learned
and/or classified by support vector machines (SVM)
or random trees (RT).
3 ADAPTIVE 3-D OBJECT
CLASSIFICATION
As indicated in the introduction, the main goal of
our approach is the autonomous learning of an opti-
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
382
point cloud keypoints features bag of words classification
states
available algorithms
global properties
global properties
>1 object class candidates: new action selection
matching object class: reward [0,1]
q-values
policy
max-q / random
actions
algorithms
selected algorithm
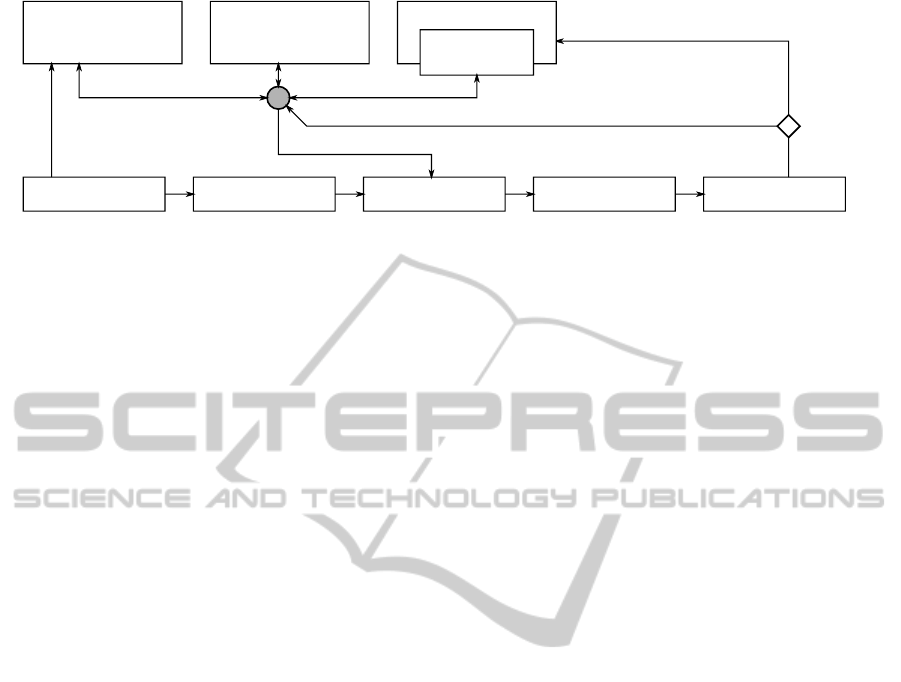
Figure 1: The proposed classification system. The basic classification pipeline is shown in the lower half. The reinforcement
learning part used for the selection of a local 3-D feature descriptor algorithm (action) is shown above. During the classi-
fication phase the decision which algorithm should be selected first/next (represented by the circle), will be made based on
the current state (the currently available actions and global properties) and the learned q-values (max-q). During the initial
learning phase the algorithms will be chosen randomly.
mized combination and application of various local
3-D feature descriptor algorithms with the purpose
to increase the overall classification rate of 3-D point
clouds. Moreover, depending on some basic proper-
ties of a point cloud, the combinations of these algo-
rithms are supposed to vary. The steps, how we intend
to realize this, are described in the following sections.
3.1 The Basic Classification Pipeline
The basic classification pipeline consists of five main
steps. Given a 3-D point cloud we start with the
collection of global properties. These properties are
the total number of points, the point cloud resolution,
the eigenvalues to get the variance that is correlated
with each eigenvector and the dimensions of the point
cloud along the eigenvectors. These values will be
used by the reinforcement learning agent to select the
first algorithm. In the second step, the intrinsic shape
signature keypoint detection algorithm (Zhong, 2009)
will be used to determine points of interest. During
the third step, one of the local 3-D feature descriptor
algorithms stated in section 2.3 will be applied. As a
result we will get a set of local 3-D feature descrip-
tions. Each of the determined feature descriptions is
quantized to be binned in a histogram (step four). In
the last step the values of the histogram will be used
as input vectors for a classifier, i. e., for an SVM, to
identify an appropriate object class. This pipeline is
depicted in the lower half of figure 1.
3.2 Fusion with Reinforcement
Learning
The basic classification pipeline will be enhanced by
a reinforcement learning agent.
States consist of sets of local 3-D feature descrip-
tor algorithms that have not already been used (a de-
scriptor will be applied only once) and the global
properties mentioned above. In order to achieve a fi-
nite number of possible states, the continuous global
properties will be divided into a fixed number of
classes.
Actions correspond to the selection of a local 3-D
feature descriptor algorithm and the application of the
last three steps of the basic pipeline (see figure 1),
i. e., the computation of local 3-D feature descriptions
based on the selected algorithm and of the histogram
which is fed as input vector into the SVMs of remain-
ing object classes. Usually the object class with the
highest score would be used as a single result. In our
case, using the SVMs as binary classifiers trained with
the responses −1 and 1, we will reject all classes with
a corresponding output < 0 and keep all classes ≥ 0
as object class candidates.
Without any restrictions the reinforcement learn-
ing agent would stop, if there is no remaining object
class or 3-D feature descriptor algorithm left. But this
“natural” termination is not desirable, since we pro-
pose a time limit t
max
how long a single object classifi-
cation should take. Thus, the learning process breaks
down into episodic tasks that end in four possible fi-
nal states. These states are reached if all algorithms
have been used once, if no object class is left, if exact
one object class is left, or if the accumulated computa-
tion time exceeds the predefined time limit t
max
. In the
only remaining situation, when there is more than one
object class candidate left, the reinforcement learning
agent continuous with the next action, i. e., with the
selection of the next algorithm (see figure 1).
At this point we have to clarify among which con-
ditions the reinforcement learning agent gets an im-
mediate reward. The reward for all states except for
the final states is 0. When the accumulated computa-
tion time is reached or no algorithm/object class is
left, the reward is also 0. For the remaining case,
when exact one object class is left, the reward depends
on the phase of the reinforcement learning system.
Adaptive3-DObjectClassificationwithReinforcementLearning
383

3.2.1 Initial Learning Phase
The application of a reinforcement learning method
is always coupled with the question, how much ex-
ploration and exploitation should be granted to the re-
inforcement learning agent. Typically, the reinforce-
ment learning system starts with a random policy for
maximum exploration. In this phase, we will use al-
ready known and classified objects from freely avail-
able data sets, e. g. from the large-scale hierarchical
multi-view RGB-D object dataset of the University
of Washington (Lai et al., 2011), since the decision
whether the final category matches is straightforward.
If the determined object class matches the input ob-
ject class, the reward is a value ∈ [0, 1] depending on
the accumulated computation time left with respect to
t
max
. Otherwise the reward is 0, too.
3.2.2 Classification Phase and Adaptive
Learning
If the q-values get more stable, the exploration is com-
monly reduced in favor of exploitation. This method
is called ε-greedy, meaning that most of the time those
actions are selected, where the expected reward is
maximized, but with the probability of ε a random
action is selected. However, instead of selecting sin-
gle actions randomly, we will adopt this concept to
completely random policy episodes with the follow-
ing behavior: during the regular classification of (un-
known) objects we will use a max-q policy selecting
always that action with the highest proposed q-value.
In these episodes no modifications of the q-values
will be made – and thus a reward is irrelevant. Oc-
casionally we will integrate random policy episodes
with known objects. In this way, the system adapts to
changes of the environment over time and allows us
to add new descriptors to the system.
3.2.3 Handling New Categories
A big advantage of our approach consist in the fact
that the number of object classes the system can rec-
ognize can increase dynamically. If no object class
candidate is left during the classification phase, an
explicit comparison with multiple accurate descrip-
tors such as PFH and SHOT is envisaged. In case,
the object can still not be assigned to one of the ob-
ject classes at hand, a new unlabeled class is created,
which means that the reinforcement learning agent
has learned a new object class autonomously. New
classes, of course, should be labeled and from time to
time reviewed for consistency.
3.2.4 Evaluation
To evaluate the results, we will determine the recog-
nition rates for each local 3-D feature descriptor al-
gorithm individually, using the basic classification
pipeline proposed in section 3.1. Subsequently, the
individual results can be compared with the results of
our adaptive 3-D object classification approach.
4 CONCLUSIONS
This proposal suggests a system which learns a strat-
egy to select and apply 3-D point cloud descriptor al-
gorithms with the goal to classify a point cloud with
high accuracy within a preset time limit. The pro-
posed approach is based on a reinforcement learn-
ing system with a 3-D classification pipeline in se-
lecting local 3-D feature descriptor algorithms. Due
to properties of reinforcement learning we expect the
approach to be highly adaptive, e. g., allowing the in-
tegration of new descriptors and the on-line learning
of new object categories.
REFERENCES
Alexandre, L. A. (2012). 3d descriptors for object and cate-
gory recognition: a comparative evaluation. In Work-
shop on Color-Depth Camera Fusion in Robotics at
the IEEE/RSJ International Conference on Intelligent
Robots and Systems (IROS), Vilamoura, Portugal.
Cholewa, M. and Sporysz, P. (2014). Classification of dy-
namic sequences of 3d point clouds. In Artificial Intel-
ligence and Soft Computing, pages 672–683. Springer.
Filipe, S. and Alexandre, L. A. (2013). A comparative eval-
uation of 3d keypoint detectors. In 9th Conference on
Telecommunications, Conftele 2013, pages 145–148,
Castelo Branco, Portugal.
Frome, A., Huber, D., Kolluri, R., Bulow, T., and Malik,
J. (2004). Recognizing objects in range data using
regional point descriptors. In Proceedings of the Eu-
ropean Conference on Computer Vision (ECCV).
Guo, Y., Bennamoun, M., Sohel, F., Lu, M., and Wan, J.
(2014). 3d object recognition in cluttered scenes with
local surface features: A survey. IEEE Transactions
on Pattern Analysis and Machine Intelligence, 36(11).
Johnson, A. E. and Hebert, M. (1998). Surface matching
for object recognition in complex three-dimensional
scenes. Image and Vision Computing, 16(9):635–651.
Lai, K., Bo, L., Ren, X., and Fox, D. (2011). A large-
scale hierarchical multi-view rgb-d object dataset. In
Robotics and Automation (ICRA), 2011 IEEE Interna-
tional Conference on, pages 1817–1824. IEEE.
Rusu, R., Blodow, N., and Beetz, M. (2009). Fast point fea-
ture histograms (fpfh) for 3d registration. In Robotics
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
384

and Automation, 2009. ICRA ’09. IEEE International
Conference on, pages 3212–3217.
Rusu, R. B., Blodow, N., Marton, Z. C., and Beetz, M.
(2008). Aligning point cloud views using persistent
feature histograms. In Intelligent Robots and Systems,
2008. IROS 2008. IEEE/RSJ International Conference
on, pages 3384–3391. IEEE.
Salti, S., Tombari, F., and Stefano, L. D. (2011). A per-
formance evaluation of 3d keypoint detectors. In
3D Imaging, Modeling, Processing, Visualization and
Transmission (3DIMPVT), 2011 International Con-
ference on, pages 236–243. IEEE.
Stein, F. and Medioni, G. (1992). Structural indexing:
efficient 3-d object recognition. IEEE Trans. PAM,
14:125–145.
Sutton, R. S. and Barto, A. G. (1998). Reinforcement learn-
ing: An introduction, volume 1. Cambridge Univ
Press.
Toldo, R., Castellani, U., and Fusiello, A. (2010). The bag
of words approach for retrieval and categorization of
3d objects. The Visual Computer, 26(10):1257–1268.
Tombari, F., Salti, S., and Di Stefano, L. (2010a). Unique
shape context for 3d data description. In Proceedings
of the ACM workshop on 3D object retrieval, pages
57–62. ACM.
Tombari, F., Salti, S., and Di Stefano, L. (2010b). Unique
signatures of histograms for local surface descrip-
tion. In Computer Vision-ECCV 2010, pages 356–369.
Springer.
Watkins, C. and Dayan, P. (1992). Technical note: Q-
learning. Machine Learning, 8(3-4):279–292.
Watkins, C. J. C. H. (1989). Learning from Delayed Re-
wards. PhD thesis, King’s College, Cambridge, UK.
Wiering, M. and Van Otterlo, M. (2012). Reinforcement
learning. In Adaptation, Learning, and Optimization,
volume 12. Springer.
Wu, C.-C. and Lin, S.-F. (2011). Efficient model detection
in point cloud data based on bag of words classifica-
tion. Journal of Computational Information Systems,
7(12):4170–4177.
Zhong, Y. (2009). Intrinsic shape signatures: A shape de-
scriptor for 3d object recognition. In Computer Vision
Workshops (ICCV Workshops), 2009 IEEE 12th Inter-
national Conference on, pages 689–696. IEEE.
Adaptive3-DObjectClassificationwithReinforcementLearning
385
