
Impedance Control based Force-tracking Algorithm for Interaction
Robotics Tasks: An Analytically Force Overshoots-free Approach
Loris Roveda, Federico Vicentini, Nicola Pedrocchi and Lorenzo Molinari Tosatti
Institute of Industrial Technologies and Automation (ITIA) of Italian National Research Council (CNR),
via Bassini, 15 - 20133 Milan, Italy
Keywords:
Force Overshoots Avoidance, Force-tracking Impedance Controls, Interacting Robotics Applications, Com-
pliant Environments.
Abstract:
In the presented paper an analytically force overshoots-free approach is described for the execution of robotics
interaction tasks involving a compliant (of unknown geometrical and mechanical properties) environment.
Based on the impedance control, the aim of the work is to perform force-tracking applications avoiding force
overshoots that may result in task failures. The developed algorithm shapes the equivalent stiffness and damp-
ing of the closed-loop manipulator to regulate the interaction dynamics deforming the impedance control
set-point. The force-tracking performance are obtained defining the control gains analytically based on the
estimation of the interacting environment stiffness (performed using an Extended Kalman Filter). The method
has been validated in a probing task, showing the avoidance of force overshoots and the achieved target dy-
namic performance.
1 INTRODUCTION
Robotics applications are increasingly targeted to in-
teraction tasks, requiring high (controlled) compli-
ance in order to ensure safety and adaptability during
the task execution.
Interaction tasks are generally referred to either
human-robot interaction, where limited energy trans-
fer is needed as major requirement, or to robot ma-
chining, where the regulation of the energy transfer
is a process requirement. The robot compliance can
then be required at either design (e.g. intrinsic safe
mechanics, such as Baxter Rethink (2012)) or control
level (e.g.KUKA LWR Kugi et al. (2008)).
Focused tasks include industrial applications such
as (semi-) automatic assembly, cooperative disas-
sembly and handling assistance, where manipulators
share the same working area with other manipulators
and human operators, while interacting with a com-
pliant and (partially) unknown environment. Specif-
ically, interesting configurations of interacting envi-
ronments include also machining processes (e.g. sur-
face finishing and forming), where materials, manu-
facturing and manufacts are either lightweight, elas-
tic, nonlinearly compliant or high-added valued.
Such applications require a fine interaction control
in order to preserve the manipulator itself and the
surrounding interacting environment. In fact, while
interacting with a human operator or a fragile com-
ponent, even a small force overshoot may cause the
failure of the task (e.g., breaking the manipulated
component).
Since the milestones of sensor-based
Figure 1: Experimental Set-up.
386
Roveda L., Vicentini F., Pedrocchi N. and Molinari Tosatti L..
Impedance Control based Force-tracking Algorithm for Interaction Robotics Tasks: An Analytically Force Overshoots-free Approach.
DOI: 10.5220/0005565403860391
In Proceedings of the 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2015), pages 386-391
ISBN: 978-989-758-123-6
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

force/dynamics control Salisbury (1980); Mason
(1981); Raibert and Craig (1981); Yoshikawa (1987);
Khatib (1987), impedance control Hogan (1984)
has been particularly effective in order to inter-
act with compliant environments, including also
non-restrictive assumptions Colgate and Hogan
(1989) on the dynamical properties of the interacting
environment. In fact, with respect to pure force
controllers Lange et al. (2012, 2013), impedance con-
trol compounds an easier tunable dynamic balance
response for the robot. In addition, particular design
of impedance controllers Ott et al. (2010), grants
a wide control bandwidth, thanks to a continuous
adaptation of the controller.
Nevertheless, some force/deformation regulation
requirements are introduced (investigated, designed
and validated) in order to improve the robustness and
safety of interaction with a dynamic task, especially
in the case of a precision-force process Roveda
et al. (2013). Although impedance methods are
proved to be dynamically equivalent to explicit force
controllers Volpe and Khosla (1995) a direct tracking
of explicit interaction forces is not straightforwardly
allowed.
To overcome this limitation and preserving the
properties of the impedance behaviour two different
families of methods have been mainly introduced:
class (a) force-position tracking impedance con-
trollers and class (b) variable impedance controllers.
Common solutions of class (a) methods is suggested
in Villani et al. (1999), where the controlled force
is derived from a position control law, scaling the
trajectory as a function of the estimated environ-
ment stiffness, calculating the time-varying PID
gains. Another important approach (Seraji and
Colbaugh, 1993, 1997; Jung et al., 2004) involves
the generation of a reference motion as a function
of the force-tracking error, under the condition that
the environment stiffness is variously unknown,
i.e.estimated as a function of the measured force.
Common solutions of class (b) methods consist on
gain-scheduling strategies that select the stiffness and
damping parameters from a predefined set (off-line
calculated) on the basis of the current target state
(Ikeura and Inooka, 1995; Ferraguti et al., 2013). Lee
and Buss (2000) varies the controlled robot stiffness
on-line to regulate the desired contact force based
on the previous force tracking error, without any
knowledge of the environment. Yang et al. (2011)
presents a human-like learning controller to interact
with unknown environments that feedforward adapts
force and impedance. Oh et al. (2014a,b) describes a
frequency-shaped impedance control method shapes
a disturbance observer in the frequency domain so
that the impedance is manipulated to achieve both the
compliant interaction and reference tracking.
Commonly in class (a) methods, all approaches
mantain a constant dynamic behaviour of the con-
trolled robot, so that when the environment stiffness
quickly and significantly changes, the bandiwth of the
controllers has to be limited for avoiding instability,
while in class (b) methods, stationary, known and
structured environment are considered. Moreover, no
contributions are related to specifically avoid force
overshoots during the task execution.
The aim of this work is to combine the main
features of such control schemes in order to an-
alytically achieve the force overshoots avoidance
goal. Extending the work described in Roveda et al.
(2014), that provide an experimental proof of the
force overshoots avoidance during the task execution
by adapting all the impedance control parameters
(i.e., set-point, stiffness and damping), the developed
method allows to analytically derive the control gains
to obtain a target oscillations-free dynamic behaviour
for the force overshoots avoidance based on the
estimation of the interacting environment stiffness
(performed using an Extended Kalman Filter). The
developed algorithm shapes the equivalent stiffness
and damping of the closed-loop manipulator deform-
ing the impedance control set-point.
The developed control algorithm has been validated
using a KUKA LWR 4+ manipulator in contact with
a second impedance controlled KUKA LWR 4 +
that simulates an interacting environment (Figure 1),
showing the avoidance of force overshoots and the
achieved target dynamic performance.
2 PROBLEM FORMULATION
Based on the estimate of the environment stiffness
b
K
e
and the force error e
f
= f
d
− f, where f
d
and f are the
desired and measured robot forces, respectively, the
developed controller (Figure 2) defines the set-point
x
0
r
of the KUKA LWR 4 + impedance controller in
order to shape the stiffness and damping of the closed-
loop manipulator while tracking a force reference. In
particular, the controller has been derived to have the
complete analytical formulation. In such a way, the
control parameters (i.e., proportional and derivative
gains K
p
, K
d
and shaping coeffients K
0
, m
k
) can be
mathematically defined:
x
0
r
= x
r
+ K
−1
r
(e
f
m
k
+ K
0
)K
p
f
d
b
K
−1
e
− K
d
˙
x
r
(1)
b
K
e
= f (f
e
,x
eq
e
,x
e
) (2)
where K
0
is the diagonal stiffness matrix of the
controlled robot at zero-force error, m
K
is the
ImpedanceControlbasedForce-trackingAlgorithmforInteractionRoboticsTasks:AnAnalyticallyForceOvershoots-free
Approach
387

Figure 2: Control scheme, including the environment observer (EKF).
coefficient describing the function of the stiffness
matrix with respect to the force error, K
p
is the
diagonal proportional gain matrix, K
d
is the diagonal
derivative gain matrix that shapes the closed-loop
manipulator damping based on the robot velocity
˙
x
r
,
f
e
is the force vector acting on the environment, x
e
is the actual position of the environment, x
eq
e
is the
equilibrium position of the environment.
In order to obtain the desired performance of the
controller, proportional and derivative gains K
p
,
K
d
and shaping coeffients K
0
, m
k
are analytically
defined. In particular, by imposing m
k
< 0 the
closed-loop manipulator behaviour is more robust in
the first contact phase, having an equivalent stiffness
that becomes stiffer as the target force is achieved.
The main task space impedance loop is performed by
the model-based control of the manipulator at a rate
of 200Hz, synchronously with the environment es-
timation (EKF in Figure 2). A model of the robot-
environment interaction is needed to define the force
set-points in (1) through the environemt stiffness
b
K
e
,
which in turn is estimated through the deformation
of the environment and the full state of robot kine-
matics and exchanged forces. Signals in (1), (2)
are updated to the main KUKA LWR control loop,
whose remote control mode allows the tuning of all
impedance parameters, together with the sampling of
force and kinematics state. The remote controller is
based on a real-time Linux Xenomai platform with
RTNet-patched network interfaces.
3 INTERACTION DYNAMICS
3.1 Closed-Loop Robot Dynamics
The KUKA LWR 4+ enables a task space visco-
elastic behavior Albu-Sch
¨
affer et al. (2007), with tun-
able equivalent Cartesian stiffness K
r
and damping
D
r
. With some experimental identification and prac-
tice it is possible to assume a full impedance behav-
ior, considering an inertia matrix M
r
with negligi-
ble/ininfluent extra-diagonal coupling terms. Some
practice with the KUKA LWR 4 + impedance control
suggests the full model
M
r
¨
x
r
+ D
r
˙
x
r
+ K
r
∆
∆
∆x
r
= f (3)
a good approximation of the real behavior of the robot
up to 5 Hz, where ∆
∆
∆x
r
= x
r
− x
0
r
is the difference be-
tween the actual robot pose, x
r
and the desired one x
0
r
,
and f is the external interacting force/torque vector.
Recall that the control interface of the KUKA LWR 4
+ allows a user-defined input x
0
r
, i.e., the impedance
balance set-point (Figure 3).
3.2 Compliant Environment Dynamics
Denoting D
e
and K
e
as the environment damping and
stiffness respectively, a simplified environment dy-
namics can be modeled as Fl
¨
ugge (1975):
f = − (D
e
˙
x
e
+ K
e
∆x
e
) (4)
where ∆x
e
= x
e
− x
0
e
, and x
0
e
is the equilibrium posi-
tion for the environment. In particular, considering a
stable contact point with x
0
e
= 0, the environment po-
sition is equal to the robot position (i.e., x
e
= x
r
), as
in Figure 3.
3.3 Environment Observer
3.3.1 EKF Design
The environment model in (4) is used to implement an
Extended Kalman Filter for the environment stiffness
estimation. Under the mild hypothesis that the con-
tact is preserved once established and simplification
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
388

Figure 3: KUKA LWR 4 + interaction model.
hypothesis that the contact(s) are elastic the robot-
environment interaction is defined by the filter state,
augmented with the environment properties:
ξ
ξ
ξ
e
= [∆x
e
,K
e
,D
e
,f
e
]
T
. (5)
Substituting the augmented state (5) in model (4), the
filter dynamics result in:
f
f
f (ξ
ξ
ξ
e
,ν
ν
ν
e
) =
D
−1
e
(−K
e
∆x
e
+ f
e
+ ν
ν
ν
x
e
)
ν
ν
ν
K
e
ν
ν
ν
D
e
ν
ν
ν
f
e
(6)
where the vector ν
ν
ν
e
= [ν
ν
ν
x
e
,ν
ν
ν
K
e
,ν
ν
ν
D
e
,ν
ν
ν
f
e
]
T
accounts
for uncertainties in models parameters/estimates.
The observer of the augmented state is therefore de-
fined as:
(
˙
ξ
ξ
ξ
e
= f
f
f (ξ
ξ
ξ
e
,ν
ν
ν
e
) + K
EKF
(y − C
a
ˆ
ξ
ξ
ξ
e
)
ˆ
y = H
H
H (ξ
ξ
ξ
e
,w
w
w)
(7)
where
ˆ
ξ
ξ
ξ are estimates, K
EKF
is the gain matrix, C
a
is
the observation matrix,
ˆ
y is the measurements vector
and H
H
H (ξ
ξ
ξ
e
,w
w
w) is the observation function.
Based on Haykin et al. (2001), the state
ˆ
ξ
ξ
ξ is updated
by measurements of x
e
and f
e
= f, providing the en-
vironment stiffness
b
K
e
(more details are shown in
Roveda et al. (2013)).
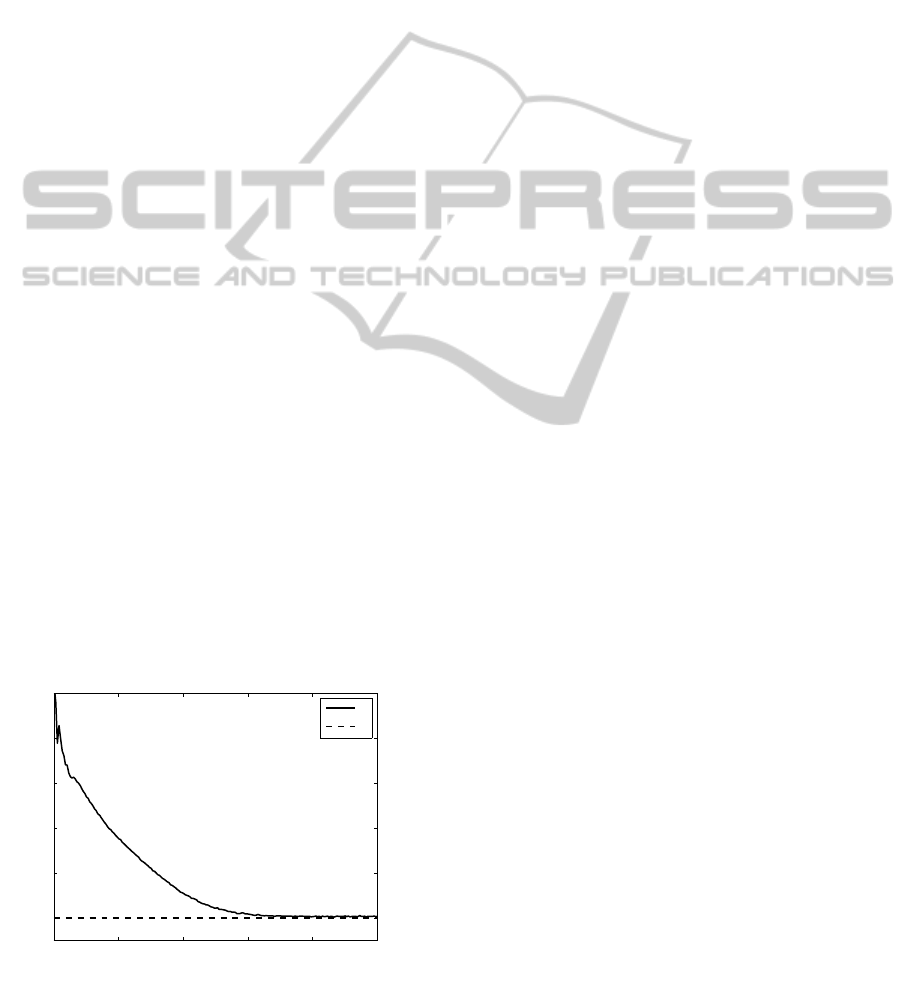
3.3.2 EKF Experimental Validation
Characterization, tuning and evaluation of the ob-
server in (7) are performed in real experiments for
the estimation of the environment stiffnes
b
K
e
, after
the localization of the environment location x
e,eq
.
The on-line estimation of environment stiffness can
be executed using the the 1-DoF formulation of (6)
[s]
0 2 4 6 8 10
b
K
e,y
[N/m]
200
400
600
800
1000
1200
nominal
estimate
Figure 4: Stiffness estimation in real experiment in 1 DoF,
along a horizontal axis.
for the filter states update.
In Fig. 4 a varing stiffness environment is observed
(a companion LWR 4+ in impedance control is used
to generate a non-shared reference stiffness) in a real
experiment. Experimental results show a delay in the
estimation of approximately 0.5 s and a maximum
steady state error of less than 1% and 3% w.r.t. the
nominal known values.
4 CONTROL APPLICATION
4.1 Control Parameters Calculation
Considering a single DoF (as the impedance control
allows to decouple the Cartesian DoF) and substitut-
ing the impedance control set-point x
0
r
as defined by
(1) and the environment dynamics as defined by (4) in
(3), the closed-loop dynamics results:
M
r
¨x
r
+ (D
r
+ D
e
+ K
r
K
d
) ˙x
r
+ (K
e
+ m
k
f
d
K
p
)x
r
= K
p
f
d
K
−1
e
(m
k
f
d
+ K
0
)
(8)
Considering the static term of (8) and x
d
r
=
f
d
K
e
, it is
easy to define the proportional gain K
p
as:
K
p
=
K
e
K
0
(9)
in order to have a zero-steady-state-error.
Considering the eigenvalues of (8), it is easy to define
the derivstive gain K
d
as:
K
d
=
p
4M
r
(K
p
m
k
f
d
+ K
e
)
K
r
(10)
in order to avoid force overshoots.
ImpedanceControlbasedForce-trackingAlgorithmforInteractionRoboticsTasks:AnAnalyticallyForceOvershoots-free
Approach
389
4.2 Validation Test
The developed control algorithm has been validated
using a KUKA LWR 4+ manipulator in contact in
the vertical Z direction with a second impedance con-
trolled KUKA LWR 4 + that simulates an interacting
environment (Figure 1). The second KUKA LWR 4
+ stiffness is not known to the controller and it is es-
timated using the implemented EKF.
During the experimental tests, the environment
stiffness is K
e
∼
=
20000N/m. The impedance con-
trol stiffness is K
r
= 5000 N/m and the adimensional
impedance control damping is h
r
= 0.3 in order to
test the capabilities of the defined controller to avoid
force overshoots, even considering a low-damped be-
haviour.
Figure 5 shows the measured and target interac-
tion forces during the task execution. The obtained
dynamics is able to avoid any force overshoot during
the task execution. The selection of the control pa-
rameters m
k
and K
0
allows to regulate the dynamic
performance of the closed-loop manipulator.
5 CONCLUSIONS
The presented paper presents an analytically force
overshoots-free approach based on the impedance
control. Shaping the equivalent stiffness and damp-
ing of the closed-loop manipulator through the
impedance control set-point, the described algorithm
allows to mathematically define the control parame-
ters in order to avoid force overshoots while interact-
ing with a compliant and unknown environment, es-
timating the environment stiffness using an Extended
Kalman Filter.
The effectiveness of the method has been proven
0 0.2 0.4 0.6 0.8 1
−10
−8
−6
−4
−2
0
[s]
[N]
f
f
d
Figure 5: Measured and target interaction forces during the
task execution.
in a probing task, showing the force overshoots avoid-
ance without any loss of bandwidth. Future work will
apply the defined algorithm to more challenging tasks
(e.g., assembly task) and will extend the algorithm to
the compliant robot base case.
ACKNOWLEDGEMENTS
The work has been developed within the project Four-
ByTHree, funded from European Unions Horizon
2020 research and innovation programme under grant
agreement n
◦
637095.
REFERENCES
Albu-Sch
¨
affer, A., Ott, C., and Hirzinger, G. (2007).
A unified passivity-based control framework for po-
sition, torque and impedance control of flexible joint
robots. The International Journal of Robotics Research,
26(1):23–39.
Colgate, E. and Hogan, N. (1989). An analysis of con-
tact instability in terms of passive physical equivalents.
In Robotics and Automation, 1989. Proceedings., 1989
IEEE International Conference on, pages 404–409.
Ferraguti, F., Secchi, C., and Fantuzzi, C. (2013). A tank-
based approach to impedance control with variable stiff-
ness. In Proceedings of the 2013 International Confer-
ence on Robotics and Automation (ICRA).
Fl
¨
ugge, W. (1975). Viscoelasticity. Springer New York.
Haykin, S. S. et al. (2001). Kalman filtering and neural
networks. Wiley Online Library.
Hogan, N. (1984). Impedance control: An approach to
manipulation. In American Control Conference, 1984,
pages 304–313.
Ikeura, R. and Inooka, H. (1995). Variable impedance con-
trol of a robot for cooperation with a human. In Robotics
and Automation, 1995. Proceedings., 1995 IEEE Inter-
national Conference on, volume 3, pages 3097–3102.
IEEE.
Jung, S., Hsia, T., and Bonitz, R. (2004). Force tracking
impedance control of robot manipulators under unknown
environment. Control Systems Technology, IEEE Trans-
actions on, 12(3):474–483.
Khatib, O. (1987). A unified approach for motion and force
control of robot manipulators: The operational space for-
mulation. Robotics and Automation, IEEE Journal of,
3(1):43–53.
Kugi, A., Ott, C., Albu-Sch
¨
affer, A., and Hirzinger, G.
(2008). On the passivity-based impedance control of
flexible joint robots. Robotics, IEEE Transactions on,
24(2):416–429.
Lange, F., Bertleff, W., and Suppa, M. (2013). Force and
trajectory control of industrial robots in stiff contact. In
Robotics and Automation (ICRA), 2013 IEEE Interna-
tional Conference on, pages 2927–2934. IEEE.
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
390

Lange, F., Jehle, C., Suppa, M., and Hirzinger, G. (2012).
Revised force control using a compliant sensor with a
position controlled robot. In Robotics and Automation
(ICRA), 2012 IEEE International Conference on, pages
1532–1537. IEEE.
Lee, K. and Buss, M. (2000). Force tracking impedance
control with variable target stiffness. The Intern. Feder-
ation of Automatic Control, 16(1):6751–6756.
Mason, M. T. (1981). Compliance and force control for
computer controlled manipulators. Systems, Man and
Cybernetics, IEEE Transactions on, 11(6):418–432.
Oh, S., Woo, H., and Kong, K. (2014a). Frequency-shaped
impedance control for safe human–robot interaction in
reference tracking application.
Oh, S., Woo, H., and Kong, K. (2014b). Stability and ro-
bustness analysis of frequency-shaped impedance con-
trol for reference tracking and compliant interaction. In
World Congress, volume 19, pages 3557–3562.
Ott, C., Mukherjee, R., and Nakamura, Y. (2010). Unified
impedance and admittance control. In Robotics and Au-
tomation (ICRA), 2010 IEEE International Conference
on, pages 554–561. IEEE.
Raibert, M. and Craig, J. (1981). Hybrid position/force con-
trol of manipulators. Journal of Dynamic Systems, Mea-
surement, and Control, 103(2):126–133.
Rethink (2012). Baxter research robot (visited january
2015).
Roveda, L., Vicentini, F., Pedrocchi, N., and Tosatti,
Francesco Braghin, L. M. (2014). Impedance shap-
ing controller for robotic applications in interaction with
compliant environments. In International Conference on
Informatics in Control (ICINCO).
Roveda, L., Vicentini, F., and Tosatti, L. M. (2013).
Deformation-tracking impedance control in interaction
with uncertain environments. In Intelligent Robots and
Systems (IROS), 2013 IEEE/RSJ International Confer-
ence on, pages 1992–1997. IEEE.
Salisbury, J. K. (1980). Active stiffness control of a manip-
ulator in cartesian coordinates. In Decision and Control
including the Symposium on Adaptive Processes, 1980
19th IEEE Conference on, volume 19, pages 95–100.
Seraji, H. and Colbaugh, R. (1993). Adaptive force-based
impedance control. In Intelligent Robots and Systems’
93, IROS’93. Proceedings of the 1993 IEEE/RSJ Inter-
national Conference on, volume 3, pages 1537–1544.
IEEE.
Seraji, H. and Colbaugh, R. (1997). Force tracking
in impedance control. The International Journal of
Robotics Research, 16(1):97–117.
Villani, L., Canudas de Wit, C., and Brogliato, B. (1999).
An exponentially stable adaptive control for force and
position tracking of robot manipulators. Automatic Con-
trol, IEEE Transactions on, 44(4):798–802.
Volpe, R. and Khosla, P. (1995). The equivalence of second-
order impedance control and proportional gain explicit
force control. The International journal of robotics re-
search, 14(6):574–589.
Yang, C., Ganesh, G., Haddadin, S., Parusel, S., Albu-
Schaeffer, A., and Burdet, E. (2011). Human-like adap-
tation of force and impedance in stable and unstable in-
teractions. Robotics, IEEE Transactions on, 27(5):918–
930.
Yoshikawa, T. (1987). Dynamic hybrid position/force
control of robot manipulators–description of hand con-
straints and calculation of joint driving force. Robotics
and Automation, IEEE Journal of, 3(5):386–392.
ImpedanceControlbasedForce-trackingAlgorithmforInteractionRoboticsTasks:AnAnalyticallyForceOvershoots-free
Approach
391
