
High Precision Temperature Control of Normal-conducting RF GUN for
a High Duty Cycle Free-Electron Laser
Kai Kruppa
1
, Sven Pfeiffer
2
, Gerwald Lichtenberg
1
, Frank Brinker
2
, Winfried Decking
2
,
Klaus Fl
¨
ottmann
2
, Olaf Krebs
2
, Holger Schlarb
2
and Siegfried Schreiber
2
1
Faculty of Life Sciences, Hamburg University of Applied Sciences, Ulmenliet 20, 21033 Hamburg, Germany
2
Deutsches Elektronen Synchrotron DESY, 22607 Hamburg, Germany
Keywords:
Nonlinear Systems, Thermal Modelling, Predictive Control, RF Cavities.
Abstract:
High precision temperature control of the RF GUN is necessary to optimally accelerate thousands of electrons
within the injection part of the European X-ray free-electron laser XFEL and the Free Electron Laser FLASH.
A difference of the RF GUN temperature from the reference value of only 0.01 K leads to detuning of the
cavity and thus limits the performance of the whole facility. Especially in steady-state operation there are
some undesired temperature oscillations when using classical standard control techniques like PID control.
That is why a model based approach is applied here to design the RF GUN temperature controller for the
free-electron lasers.
A thermal model of the RF GUN and the cooling facility is derived based on heat balances, considering the
heat dissipation of the Low-Level RF power. This results in a nonlinear model of the plant. The parameters are
identified by fitting the model to data of temperature, pressure and control signal measurements of the FLASH
facility, a pilot test facility for the European XFEL. The derived model is used for controller design. A linear
model predictive controller was implemented in MATLAB/Simulink and tuned to stabilize the temperature of
the RF GUN in steady-state operation. A test of the controller in simulation shows promising results.
1 INTRODUCTION
This paper deals with temperature control of the
radio-frequency (RF) GUN for the European X-Ray
free-electron laser XFEL at the Deutsches Elektronen
Synchrotron (DESY). The 1.15 billion Euro XFEL fa-
cility with a length of 3.4 kilometers is under con-
struction, (Altarelli et al., 2006). With European
XFEL it will be possible to generate intense X-
ray laser pulses with a few femtosecond duration.
The electrons are accelerated by 101 superconducting
modules and forced through an undulator leading to
a sinusoidal path and therefore to the release of pho-
tons, i.e. synchrotron radiation. This narrow band-
width photon beam with wavelength down to 0.05 nm
allows to take 3D images at the atomic level. Figure 1
shows the XFEL tunnel with accelerator modules.
Simulation methods allow to develop algorithms
and model-based feedback schemes even before the
European XFEL is in operation. The approaches can
be verified and tested by parameters taken from the
Free Electron Laser FLASH, which is the first soft
Figure 1: Tunnel of European XFEL (Source: DESY).
X-ray facility ever build and nowadays used for pho-
ton science, (FLASH, 2013). Even though FLASH is
a smaller facility with a length of 315 meters, it has
a comparable structure. The modelling and parame-
ter identification here is done with data from FLASH.
With parameter adjustments this model should be
used at XFEL, too. This allows to derive control
structures for optimal performance of FLASH and the
new XFEL even before its operation starts.
307
Kruppa K., Pfeiffer S., Lichtenberg G., Brinker F., Decking W., Flöttmann K., Krebs O., Schlarb H. and Schreiber S..
High Precision Temperature Control of Normal-conducting RF GUN for a High Duty Cycle Free-Electron Laser.
DOI: 10.5220/0005567503070317
In Proceedings of the 5th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH-2015),
pages 307-317
ISBN: 978-989-758-120-5
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
The RF GUN is the electron source of the whole fa-
cility, (Hoffmann et al., 2015). Temperature control
is a very important task in RF GUN operation be-
cause a temperature that does not fit the reference
value leads to detuning of the cavity. This limits the
performance of the RF GUN such that it cannot be
operated optimally. A first investigation of a model
based controller approach for steady-state operation
of the RF GUN as example at FLASH is investigated
here. Therefore a thermal model of the RF GUN and
its water cooling circuit is derived respecting the in-
fluence of the dissipated power of the low-level radio
frequency control structures (LLRF). Parameters are
identified by fitting the model to measurement data.
Moreover simulations of the model can be used inter-
nally inside a model predictive controller (MPC) to
get optimal signals for RF GUN temperature control.
A linear MPC approach shows promising results in
simulation.
The paper is organized as follows. In Section 2
the system with cooling circuit and RF GUN with its
sensors and actors is described first. Afterwards in
Section 3 a dynamical nonlinear model of the plant
is developed and the parameters are estimated based
on measurement data in Section 4. This model is
used to design a model predictive controller in Sec-
tion 5 which is implemented in MATLAB/Simulink
and tested in simulation. Summary and options for
future work are given in Section 6.
2 PLANT
This section introduces the main characteristics of the
plant that should be modelled. The data and struc-
ture of the FLASH facility will be used here to derive
the model. The XFEL RF GUN will be similar to
FLASH gun such that the basic structure of the model
can be applied to XFEL, too. Therefore the setup
and the location of important sensors are described.
The electron source of the free electron laser is the
RF GUN. Electrons are extracted from the cathode
and accelerated by an electric field. The microwave
power, necessary to accelerate the electrons, is gen-
erated by a klystron and is coupled over a waveguide
to the gun. The cavity is operated at a resonance fre-
quency of 1.3 GHz. It is very important that the cavity
works under tuned conditions at resonance frequency
to get an efficient acceleration of the electrons. The
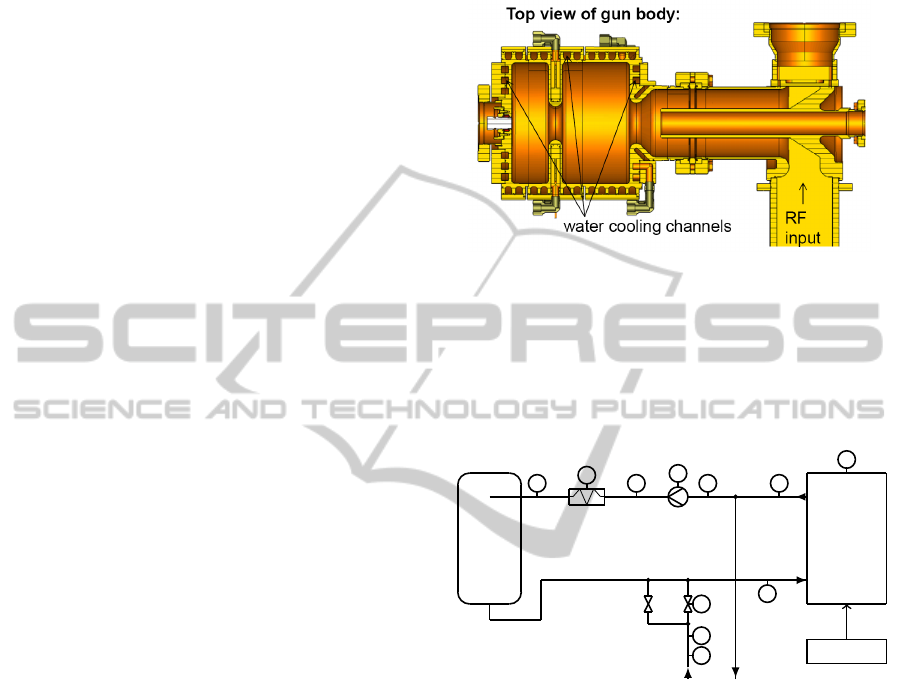
gun body is build of copper and has a structure of a
hollow cylinder with 1.5 cells. Because of dissipated
RF power the RF GUN heats up such that a cool-
ing is necessary to control the temperature of the gun
body and to operate the RF GUN under tuned con-
ditions. The average cooling load is in the order of
several 10 kW. A schematic cross-section of the RF
GUN at FLASH is depicted in Figure 2.
Figure 2: RF GUN at FLASH, (Stephan, 2015).
The system focused here at FLASH consists of the
RF GUN controlled by LLRF and the water circuit
which supplies the RF GUN with cooling water. Fig-
ure 3 shows the schematic setup.
Tank
RF GUN
LLRF
T
T
3
T
T
2
P
p
2
T
T
1
T
T
4
P
p
1
α
α
v
T
T
cw
α
α
p
α
α
h
T
T
g
Inflow Outflow
Figure 3: RF GUN with cooling circuit, existing tempera-
ture sensors T , pressure sensors p and control inputs α.
The RF GUN is equipped with cooling pipes to
control its temperature. They are supplied with cold
water. In typical operation (T
1
> T
4
) warmer water
leaves the RF GUN, because the RF GUN heats up
due to RF power losses. The water circuit supplying
the RF GUN consists of a heater, a water tank, mixing
valves and a water inlet and outlet. The mixing valves
allow to add cold water of a water reservoir from the
inflow to the water circuit to cool the water down. The
inflow is controlled by two valves, a small and a big
one. Most of the time the big valve is closed such that
the whole flow is controlled by the small one. On the
other side of the RF GUN water of the same amount
is taken out at the water outflow. The volume flow
in the circuit is controlled by a pump. If necessary,
a heater is available to heat up the water in the cir-
cuit. The heater keeps the temperature constant if the
SIMULTECH2015-5thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
308

RF GUN is not in operation, such that the water does
not cool down to room temperature. A water tank is
installed between the heater and the mixing valves.
With this tank possible temperature oscillations in the
circuit should be damped such that a disturbance in
the water temperature is not fed back directly to the
RF GUN. The tank acts like a low-pass filter.
The cooling water circuit and the RF GUN are pro-
vided with several temperature and pressure sensors.
All temperature sensors are PT100 sensors with four
wire connection. Five temperature sensors T
cw
and T
1
to T
4
are located in the water circuit outside the
RF GUN. The pressure is measured at two loca-
tions p
1
and p
2
. The locations of the sensors are
depicted in Figure 3. Additionally the control inputs
of the pump α
p
, the valves α
v
and the heater α
h
are
recorded. Five further sensors measure the tempera-
ture inside the RF GUN. The rough position of these
sensors in red and the cooling pipes in blue are high-
lighted in Figure 4.
T
iris
T
4
,
˙
V
g
T
1
,
˙
V
g
T
cell1
T
cell2
T
cell3
T
coupler
Figure 4: Gun body with sensors.
Three sensors are located near the outside surface
of the RF GUN such that they are influenced much by
the cooling water. One sensor is at the iris and one
sensor at the coupler tube, which is the connection of
the RF GUN to the next acceleration modules. The
iris sensor T
g
is the most representable sensor for the
temperature inside the RF GUN.
3 THERMAL MODEL OF THE
PLANT
In this section the model of the RF GUN and the
cooling circuit is derived. A grey-box modelling ap-
proach is used here. Only the effects that influence
the dynamics the most should be considered here. All
other minor effects are neglected because they have
just a small influence on the dynamical behaviour of
the component. This leads to models that are not too
complicated and do not need too much computational
effort in simulation. This makes them suitable for
controller design.
The basis of all following modelling approaches
are heat balances. This means that the sum of sup-
plied power
˙
Q
in,i
and discharged power
˙
Q
out, j
should
be equal to the stored power
˙
Q
stored
in the component.
The supplied power contributes with a positive sign
and the discharged power with a negative sign to this
balance
˙
Q
stored
=
∑
i
˙
Q
in,i
−
∑
j
˙
Q
out, j
. (1)
The heat is given by, (Kuchling, 1991)
Q = cρV T, (2)
where c is the specific heat capacity, ρ the density, V
the volume and T the temperature of the medium.
The thermal behaviour of the RF GUN should be
modelled taking into account the influence of LLRF
control structures. Operating the RF GUN at a certain
acceleration gradient requires RF power controlled by
LLRF system. The RF GUN is heated by RF power
loss caused by normal conducting resonator. From
the RF point of view it is necessary to have a certain
gun temperature to operate under tuned conditions.
If there are temperature deviations the cavity is de-
tuned. It is still operable but works under suboptimal
conditions, e.g. increase in RF power to achieve the
nominal accelerating gradient. Therefore the cavity
requires additional RF power in this case.
3.1 Cooling Pipes
The RF GUN must be cooled to control its temper-
ature. This is done by cooling pipes that are dis-
tributed in the whole RF GUN body. The cooling
pipes schematically indicated in blue in Figure 4 are
supplied with cold water from the water circuit with
temperature T
4
and flow
˙
V
g
. As simplification it is as-
sumed that the water in the pipes is completely mixed
with temperature T
r
and no flow losses occur. The wa-
ter leaves the pipes of RF GUN with temperature T
1
and flow
˙
V
g
. Since the pipes cool the RF GUN a heat
transfer between cooling pipes and gun body takes
place that is proportional to the difference of the tem-
peratures of RF GUN and cooling water with a fac-
tor k
cg
. A small part of the power gets lost to the envi-
ronment. The environmental temperature is assumed
to be constant, because the influence of variations of
this temperature on the behaviour of the RF GUN is
negligible. It is represented by a constant parame-
ter T
env
. These losses are modelled by a heat transfer
proportional to the difference between the tempera-
tures of the pipe and the environment with constant
HighPrecisionTemperatureControlofNormal-conductingRFGUNforaHighDutyCycleFree-ElectronLaser
309

of proportionality k
ce
. The balance of all the powers
gives
c
w
ρ
w
V
c
˙
T
1
= c
w
ρ
w
˙
V
g
(T
4
− T
1
) − k
ce
(T
1
− T
env
)
−k
cg
(T
1
−T
g
), (3)
where V
c
is the volume of the cooling pipes and c
w
and ρ
w
the specific heat capacity and density of water.
Rearranging (3) gives a first order differential equa-
tion to compute the return temperature T
1
of the cool-
ing pipes
˙
T
1
=
˙
V
g
V
c
(T
4
− T
1
) −
k
ce
c
w
ρ
w
V
c
(T
1
− T
env
)
−
k
cg
c
w
ρ
w
V
c
(T
1
− T
g
). (4)
3.2 Gun Body
The temperatures of the gun body are measured by
five sensors. The temperature distribution inside the
RF GUN depends on the electromagnetic field and is
very complicated, (Fl
¨
ottmann et al., 2008). The fo-
cus of the model developed here is its applicability
for controller design which leads to the negligence of
these complex effects.
Because of this the RF GUN is modelled as one body
with one temperature T
g
representing the thermal be-
haviour of the whole RF GUN. One of the five sensors
should be representable for the RF GUN. The three
sensors T
cell,i
, i = 1, 2, 3 at the outer surface of the RF
GUN are very much influenced by the cooling pipes
and do not show the influence of the LLRF properly.
The sensor T
coupler
at the RF GUN exit measures in-
fluences from the coupling too. That is why the sensor
next to the iris was chosen T
g
= T
iris
. It is located next
to the middle of the gun body and is influenced by the
LLRF as well as by the cooling circuit.
The energy balance of the gun body contains three
parts. The heat transfer from the cooling pipes is pro-
portional to the temperature difference of T
g
and T
1
with the factor k
cg
as in (3). The RF GUN has losses
to the environment with temperature T
env
. The heat
transfer coefficient is k
ge
. The third part of the bal-
ance is the dissipated power P
diss
of the LLRF. The
powers sum up to
c
c
ρ
c
V
g
˙
T
g
=P
diss
+k
cg
(T
1
−T
g
)−k
ge
(T
g
−T
env
), (5)
which gives the differential equation of the gun tem-
perature
˙
T
g
=
1
c
c
ρ
c
V
g
P
diss
+
k
cg
c
c
ρ
c
V
g
(T
1
− T
g
)
−
k
ge
c
c
ρ
c
V
g
(T
g
− T
env
). (6)
The volume of the RF GUN is denoted by V
g
and it is
assumed that it is fully build of copper with material
constants c
c
and ρ
c
. The computation of the dissi-
pated power is described in the next part.
3.3 Thermal Influence of the LLRF
The RF GUN is heated by the thermal losses of the
LLRF power. The cavity voltage depends on the input
power and detuning, i.e. correlated to the RF GUN
temperature. If the temperature of the RF GUN devi-
ates from its optimal setpoint, the cavity gets detuned
which leads to an increase of reflected power in the
cavity and with that the cavity voltage decreases by
destructive interference of forward and reflected sig-
nal. The following model describes this behaviour of
the RF and its thermal effects. The modelling of the
RF inside the cavity and its dissipated power are based
on (Schilcher, 1998).
If the cavity is supplied by forward power there ex-
ists an electric field inside the cavity. Integration of
the electric field gives the cavity voltage V
cav
. The
real part of this voltage accelerates the electrons in the
cavity. But the RF field also induces a certain surface
current at the wall of the cavity which heats up the de-
vice. The RF behaviour of the cavity can be modelled
by an LCR resonator circuit, shown in Figure 5.
L
C
R
Z
ext
I
Figure 5: LCR resonator circuit.
The resistance represents the losses that are trans-
ferred to the gun body as heat
P
diss
=
|
V
cav
|
2
R
sh
. (7)
The shunt resistance R
sh
is defined as two times the
cavity resistance 2R. The loaded shunt impedance R
L
in the LCR circuit is the parallel connection of the
cavity resistance and the external load Z
ext
.
With the electrical equivalent circuit the cavity volt-
age is given by a second order differential equation
¨
V
cav
+
1
R
L
C
˙
V
cav
+
1
LC
V
cav
=
1
C
˙
I, (8)
¨
V
cav
+
ω
0
Q
L
˙
V
cav
+ ω
2
0
V
cav
=
ω
0
R
L
Q
L
˙
I, (9)
with the resonance frequency ω
0
and the loaded qual-
ity factor Q
L
. The circuit is excited by the forward
current I coming from the klystron. The stationary
SIMULTECH2015-5thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
310

solution of (9) with harmonic excitation I =
ˆ
I
0
sin(ωt)
gives
V
cav
=
ˆ
V
cav
sin(ωt + ψ), (10)
with the amplitude
ˆ
V
cav
and the angular frequency ω
of the cavity voltage and the detuning angle ψ. The
angle ψ describes the difference between forward
phase and the phase of the cavity voltage
ψ = φ
f or
− φ
cav
. (11)
Under tuned, which means optimal resonance oper-
ating conditions, the phase is equal to the phase of
the cavity voltage φ
f or
= φ
cav
such that the detun-
ing ψ is equal to zero. For small frequency devia-
tions ∆ω = ω
0
− ω ω
0
the detuning and the ampli-
tude variations are given by
tan(ψ) ≈ 2Q
L
∆ω
ω
0
, (12)
ˆ
V
cav
≈
R
L
ˆ
I
0
p
1 + tan(ψ)
2
. (13)
Equation (13) describes the behaviour of the ampli-
tude of the cavity voltage depending on the detun-
ing
ˆ
V
cav
(ψ). Since the forward current is not available
as measurement but the forward power P
f or
R
L
ˆ
I
0
= R
L
r
P
f or
R
L
=
p
R
L
P
f or
(14)
has to be inserted in (13) to make it usable for a pa-
rameter estimation
ˆ
V
cav
≈
p
R
L
P
f or
p
1 + tan(ψ)
2
. (15)
The detuning ψ depends on the temperature of the RF
GUN. A change in gun temperature ∆T
g
leads to a
change in geometry of the RF GUN. The influence
of the temperature change on the detuning can be de-
scribed by a constant factor α such that the tempera-
ture change is assumed to be proportional to the tan-
gent of the detuning
tan(ψ) = α∆T
g
, (16)
with proportional constant α. It is assumed that the
setpoint T
g,SP
of the gun temperature is always chosen
optimal such that the detuning is zero if T
g
is equal
to T
g,SP
∆T
g
= T
g
− T
g,SP
= 0 ⇔ T
g
= T
g,SP
→ ψ = 0. (17)
Inserting to (16) gives
tan(ψ) = α(T
g
− T
g,SP
). (18)
The constant α can be estimated from measurement
data by a linear approximation of the relation between
detuning tan(ψ) and gun temperature. The temper-
ature dependence of the cavity voltage can be com-
puted by inserting (18) into (15) resulting in
ˆ
V
cav
(T
g
) =
s
R
L
P
f or
1 + α
2
(T
g
− T
g,SP
)
2
. (19)
Figure 6 shows the temperature dependence of
ˆ
V
cav
with a chosen value of α = −26
1
K
. During parameter
estimation this turned out to be a typical value for α.
Figure 6: Temperature dependence of the cavity voltage.
3.4 Cooling Circuit
The cooling water circuit supplies the RF GUN with
cold water. The model of the circuit is divided into
three parts, as depicted in Figure 7. The borders be-
tween the different parts are set according to the posi-
tions of the temperature sensors T
1
, . . . , T
4
.
Tank
˙
V
g
˙
V
g
˙
V
k
˙
V
cw
˙
V
cw
T
T
3
T
T
2
P
p
2
T
T
1
T
T
4
P
p
1
α
α
v
T
T
cw
α
α
p
α
α
h
12
3
Figure 7: Scheme of the cool water circuit with partitioning
for modelling.
The first part of the cooling circuit starts at the
water outlet of the cooling pipes of the RF GUN. The
water leaves the RF GUN with the flow
˙
V
g
. Its temper-
ature is measured by the sensor T
1
. Since no power is
added or removed the temperature T
2
can be modelled
by a simple time delay
HighPrecisionTemperatureControlofNormal-conductingRFGUNforaHighDutyCycleFree-ElectronLaser
311

T
2
(t) = T
1
(t − T
d,21
). (20)
It takes some time since the water from T
1
reaches
the second sensor position T
2
. Temperature losses in
the pipes are neglected. The flow
˙
V
g
is split up. The
flow
˙
V
cw
is fed back to the water reservoir. The re-
maining part
˙
V
k
=
˙
V
g
−
˙
V
cw
(21)
flows through the water circuit.
In part 2 the temperature is mainly influenced
by an electrical heater that heats the water flowing
through the device. The added power
˙
Q
h
can be con-
trolled linearly by its control input α
h
∈ [0, 1] resulting
in
˙
Q
h
= α
h
˙
Q
h,max
, (22)
with
˙
Q
h,max
denoting the maximum power of the
heater. The heater used here has a specified maxi-
mum power of 6 kW . Water with the temperature T
2
enters the heater with a flow
˙
V
k
. Warm water with
temperature T
3
leaves the component with the same
flow. Building the thermal balance gives
c
w
ρ
w
V
h
˙
T
3
(t) = c
w
ρ
w
˙
V
k
((T
3
(t) − T
2
(t−T
d,32
))
+
˙
Q
h
(t), (23)
where V
h
is the volume of the heater. Rearrang-
ing (23) and inserting (22) gives the differential equa-
tion for T
3
˙
T
3
(t) =
˙
V
k
V
h
(T
3
(t) − T
2
(t−T
d,32
))
+
˙
Q
h,max
c
w
ρ
w
V
h
α
h
(t). (24)
There is a time delay in this part of system, denoted
by the parameter T
d,32
.
The water circulates in the pipes because of the pump.
It sets up the volume flow
˙
V
k
. The pump is controlled
by the signal α
p
∈ [0, 1]. Since no volume flow rate
measurements are available in the whole cooling cir-
cuit it is hard to model the pump and the volume flow.
Thus a linear dependence between the volume flow
˙
V
k
and the control input of the pump is assumed by
˙
V
k
= α
p
˙
V
k,max
, (25)
with maximal possible flow
˙
V
k,max
for α
p
= 1. The
maximal volume flow
˙
V
k,max
is a parameter that will
be determined during parameter estimation. This sim-
ple model can be used because the focus of the overall
model is on steady-state operation. Under this condi-
tion the volume flow and the control signal just vary
a little which justifies a linear approximation of the
nonlinear behaviour of the pump around an operating
point.
The third part of the cooling circuit contains the
most important devices. The water flows through the
tank to damp most of the fluctuations in the tempera-
ture. Behind the tank, water from a cold water reser-
voir is added by a mixing valve to cool the water. The
measurement information that is available here are the
temperatures T
3
and T
4
of the inflowing and outflow-
ing water of the cooling circuit, the temperature T
cw
of the inflowing cold water, the valve position α
v
and
the pressure on the reservoir side of the valve.
Since the tank should damp the temperature fluctua-
tions in the circuit a simple model of a low-pass is
used here. The output temperature of the tank is un-
known. Water with temperature T
3
enters with the
flow
˙
V
k
. The unknown output temperature of the tank
with volume V
t
is denoted by T
x
. The thermal balance
of the tank gives
c
w
ρ
w
V
t
˙
T
x
= c
w
ρ
w
˙
V
k
T
3
− c
w
ρ
w
˙
V
k
T
x
(26)
⇔
˙
T
x
=
˙
V
k
V
t
(T
3
− T
x
). (27)
The water leaving the tank is mixed with the cold
water from a reservoir with temperature T
cw
. The
flow
˙
V
cw
is not captured by a sensor. Only estima-
tions are possible. The flow is influenced by the valve
position α
v
. A first modelling approach is a linear de-
pendence of the flow through the valve from the valve
position
˙
V
cw
=
˜
α
v
˙
V
cw,max
, (28)
with the maximal flow
˙
V
cw,max
that should be identi-
fied by a parameter estimation. Since the valve does
not react instantaneously on a change in the control
signal α
v
, the reaction of the valve is modeled in
Laplace domain (denoted by s) by a linear damping
of the control signal resulting in
˜
α
v
(s) =
1
T
v
s + 1
α
v
(s). (29)
The mixed flow that supplies the RF GUN is de-
scribed by
˙
V
g
=
˙
V
k
+
˙
V
cw
, (30)
T
4
=
˙
V
k
T
x
+
˙
V
cw
T
cw
˙
V
c
+
˙
V
cw
. (31)
Combining the three parts gives the model of the over-
all cooling circuit.
3.5 Overall Model
Equations (4), (6), (7) and (19) describing the thermal
behaviour of the RF GUN and equations (20) to (31)
describing the dynamics of the cooling circuit form
SIMULTECH2015-5thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
312

the thermal model of the overall plant. This results in
a nonlinear, multiple input, multiple output (MIMO)
state space model
˙
x = f(x, u), (32)
y = g(x, u), (33)
with six inputs
u =
T
g,SP
P
f or
α
h
α
v
T
cw
α
p
T
, (34)
five states
x =
T
g
T
r
˜
α
v
T
x
T
3
T
, (35)
and the parameters to be identified
c
w
ρ
w
c
c
ρ
c
V
c
V
g
k
cg
k
ca
k
ga
α R
sh
R
L
···
T
d,21
T
d,32
V
h
V
t
˙
V
k,max
˙
V
cw,max
˙
Q
h,max
T
env
T
.
The derived MIMO model describes the thermal be-
haviour of the RF GUN facility taking into account
the influence of the water cooling and the LLRF on
the gun body. The cross couplings of the cooling and
the LLRF power can be simulated by having the con-
trol signals of the water circuits α
h
, α
v
, α
p
and the for-
ward power P
f or
of LLRF as inputs to the plant. The
whole model was implemented and simulated using
MATLAB/Simulink, (Mathworks, 2014b).
4 PARAMETER ESTIMATION
The data available for estimation and validation are
recorded with a sampling rate of approximately one
second at FLASH. From an LLRF point of view no in-
trapulse information are used. The model works with
average powers. The LLRF signal influencing the gun
temperature here is the forward power P
f or
. Its peak
values P
f or,peak
are measured by a power meter. The
average power follows from
P
f or
= P
f or,peak
τ f
rep
, (36)
with a flattop time τ and a pulse repetition rate f
rep
of 10 Hz. With this data the parameters of all parts
of the model are estimated componentwise first. This
means that the parameters of each component on its
own are adapted to its input/output measurement data.
All parts are fed with measured input data and the
parameters are changed such that the quadratic dif-
ference between simulated and measured outputs is
minimized, (Ljung, 1987). The estimated parameters
were cross-validated by a second different data set.
The parameter estimations were done by the Simulink
Design Optimization Toolbox of MATLAB, (Math-
works, 2014a).
4.1 Componentwise Estimation
The parameters of the RF GUN are identified by feed-
ing the inputs T
4
,
˙
V
g
, T
g,SP
and P
f or
with measure-
ment data and identify the parameters such that the
simulated output signals T
g
and T
1
are fit to the cor-
responding measured values. A simulation of the RF
GUN with the resulting parameters and the validation
data set shows the results of the parameter estimation
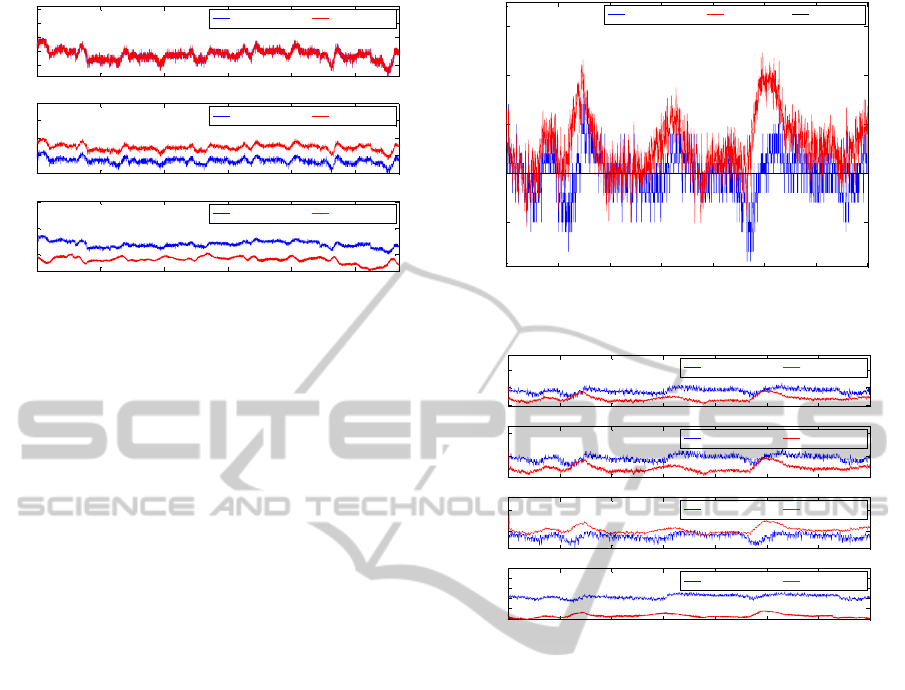
of the RF GUN, depicted in Figure 8. Figure 9 shows
a zoom in time range of the simulation results. The
model captures the dynamics of the RF GUN very
well except of a certain offset.
0 200 400 600 800 1000
61
61.1
61.2
61.3
Temperature [°C]
T
g
Measurement T
g
Simulation T
g
Setpoint
0 200 400 600 800 1000
55.5
55.6
55.7
55.8
Time [min]
Temperature [°C]
T
1
Measurement
T
1
Simulation
Figure 8: Validation results of the gun model.
740 750 760 770 780 790 800
61
61.1
61.2
61.3
Temperature [°C]
T
g
Measurement T
g
Simulation T
g
Setpoint
740 750 760 770 780 790 800
55.5
55.6
55.7
55.8
Time [min]
Temperature [°C]
T
1
Measurement
T
1
Simulation
Figure 9: Validation results of the gun model (Zoom).
The parameters of the water circuit were identified
with the input signals T
1
, T
cw
, α
h
, α
v
and α
p
together
with the output temperatures T
2
, T
3
and T
4
. The re-
sults of the validation simulation are depicted in Fig-
ure 10.
The simulation shows that the behaviour at sen-
sor position 2 and 3 are captured well. The model
shows the same dynamics. The temperature T
3
only
shows an offset. The difference between measure-
ment and simulation of temperature T
4
is much larger.
HighPrecisionTemperatureControlofNormal-conductingRFGUNforaHighDutyCycleFree-ElectronLaser
313
0 200 400 600 800 1000
55.5
55.6
55.7
55.8
55.9
Temperature [°C]
T
2
Measurement T
2
Simulation
0 200 400 600 800 1000
55.8
56
56.2
56.4
Temperature [°C]
T
3
Measurement T
3
Simulation
0 200 400 600 800 1000
52
52.5
53
Time [min]
Temperature [°C]
T
4
Measurement T
4
Simulation
Figure 10: Validation results of the cooling circuit model.
The model does not show all the dynamics of the real
system. A reason for this modelling error could be
that only few measurement information is available
in this part of the system. The behaviour of the tank
and the mixing valve are captured together by the sen-
sor T
4
. This makes it hard to model these components,
because their effects cannot be measured separately.
The missing flow information contributes to the error,
too.
4.2 Overall Estimation
After this componentwise estimation of the model pa-
rameters, the different parts of the model are linked to
the overall model as shown in Section 3.5. This closes
the water circuit. The return water of the RF GUN is
linked as input to the water circuit which cools the
water down and supplies the gun pipes with cold wa-
ter. With this model a fine tuning of the parameters
was done. The results of the simulation with valida-
tion data of the RF GUN and the cooling circuit are
shown in the following Figures 11 and 12.
These simulations show that the dynamics of the
gun temperature in the closed circuit cannot be cap-
tured as good as before in the componentwise simula-
tion. These differences can be explained by the mod-
elling errors in the last part of the cooling circuit. The
modelling errors occurring in this part are fed back to
the RF GUN resulting in a propagation of the error.
The simulated gun temperature shows an additional
offset, but the main dynamics of the RF GUN are still
captured.
The reasons for the modeling errors could be the
missing flow information. There are no flow sensors
provided even though the flow is a very important
item of the model, because it defines the heat power.
Flow estimations are very rough. Additionally it is
assumed that one temperature sensor represents the
whole RF GUN which cannot model the behavior ex-
0 50 100 150 200 250 300 350
61
61.05
61.1
61.15
61.2
Time [min]
Temperature [°C]
T
g
Measurement T
g
Simulation T
g
Setpoint
Figure 11: Validation results of the overall model (Gun tem-
perature).
0 50 100 150 200 250 300
55.4
55.6
55.8
Temp. [°C]
T
1
Measurement T
1
Simulation
0 50 100 150 200 250 300
55.6
55.8
Temp. [°C]
T
2
Measurement T
2
Simulation
0 50 100 150 200 250 300
56
56.2
Temp. [°C]
T
3
Measurement T
3
Simulation
0 50 100 150 200 250 300
51.8
52
52.2
52.4
52.6
Time [min]
Temp. [°C]
T
4
Measurement T
4
Simulation
Figure 12: Validation results of the overall model (Circuit
temperatures).
actly. But it should be sufficient for controller design.
5 MODEL PREDICTIVE
CONTROL
In this part the model of FLASH derived in Section 3
is used to design a model predictive controller (MPC).
At each sampling instant the controller computes the
optimal future control input with respect to a certain
cost function such that e.g. the system follows a given
trajectory. A linear MPC approach is used here. This
means that first of all the model of Section 3 has to be
linearized around a given operating point. After that
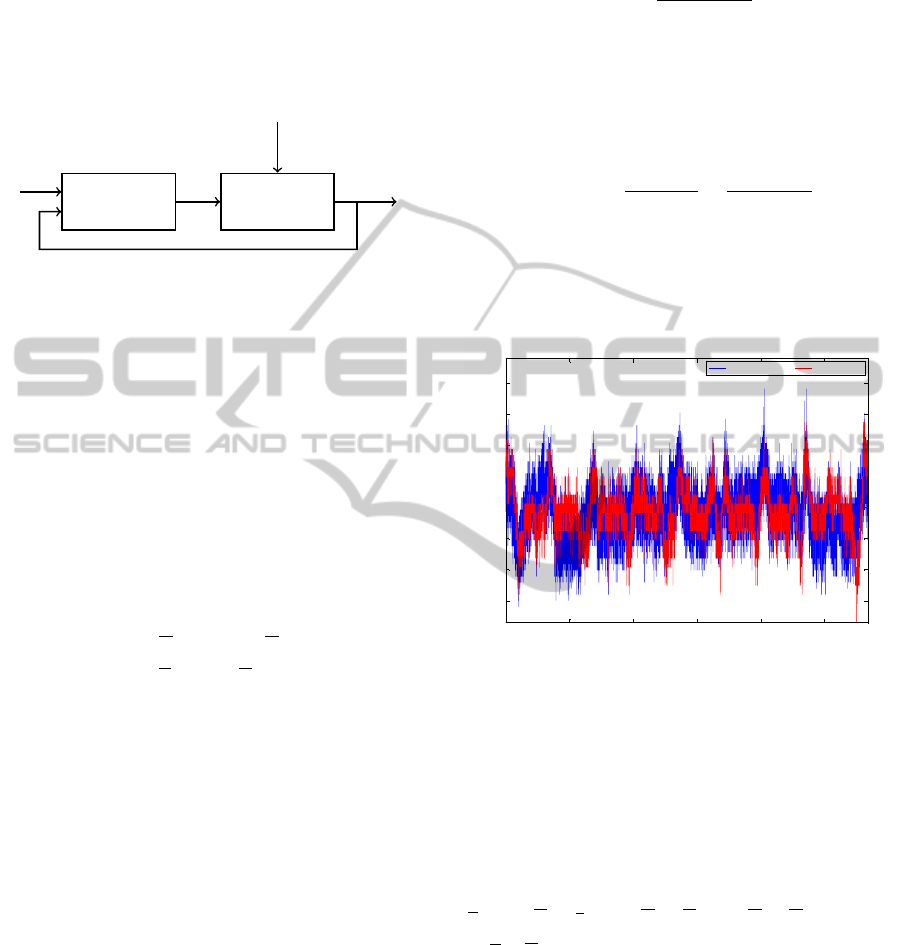
the linear MPC can be designed and tuned.
5.1 Control Problem
The theory of linear MPC with constraints will now
be applied in simulation to control the temperature of
the gun, (Maciejowski, 2002). As first controller ap-
proach for the facility a controller for a SISO mod-
SIMULTECH2015-5thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
314
elled plant is depicted here. The controller should set
the position of the valve α
v
such that the difference
between gun temperature T
g
and its set point T
g,SP
is
minimal. The system is disturbed by the cold water
with temperature T
cw
and the environment tempera-
ture T
env
. Figure 13 shows the structure of the design.
Predictive
controller
System
α
v
T
cw
T
env
T
g,SP
T
g
Figure 13: Controller structure.
Inside the controller a linearization of the nonlin-
ear plant model is used to simulate system responses
to different input signals. With that an optimal control
signal for the plant can be computed. Thus first of all
a linear, single input, single output (SISO) model of
the nonlinear MIMO model is derived. The controller
should stabilize the temperature in steady-state oper-
ation. This justifies the use of a linear model. It is
valid for a certain range around the operating point.
For start up operation of the gun this linear model is
probably not suitable. But for steady-state operations
it fits the needs. Because of that some inputs of the
nonlinear model are set to constants to linearize it
T
g,SP
= T
g,SP
, T
cw
= T
cw
, (37)
α
p
= α
p
, α
h
= α
h
(38)
The overline indicates the operating point of the cor-
responding inputs. This does not limit the perfor-
mance of the model, because the dynamics of the sig-
nals does not influence the dynamics of the model ex-
tremely. The cold water temperature influences the
model, but it is hard to estimate the behaviour of this
temperature. As first assumption it is set constant
here. The forward power has an enormous influence
on the dynamics of the gun temperature. The model
in the controller estimates the future states of the gun.
Since these states depend on the forward power an es-
timation of the future forward power has to be found.
Because of that the influence of the LLRF con-
trol on the forward power has to be modelled some-
how. The LLRF control tries to keep the cavity volt-
age constant. The cavity voltage decreases if the cav-
ity is detuned. If e.g. the voltage decreases the for-
ward power is increased to compensate the voltage
decrease in the cavity. The influence of the detuning
on V
cav
was modelled by (15). With the assumption of
a constant cavity voltage a relation between forward
power and detuning can be found resulting in
P
f or
= C
1
1 + tan
2
(ψ)
(39)
with an unknown constant factor C.
The dynamic behaviour of the relation should be ap-
proximated by a linear model. A black box identifi-
cation with the System Identification Toolbox gives a
first order transfer function model, (Ljung, 2001)
G
LLRF
(s) =
Y
LLRF
(s)
U
LLRF
(s)
=
K
LLRF
T
LLRF
s + 1
(40)
with the input U
LLRF
(s) = α(T
g
− T
g,SP
) and the out-
put Y
LLRF
(s) = P
f or
. The simulation results of the val-
idation of the LLRF model are shown in Figure 14
with K
LLRF
= −56 and T
LLRF
= 0.8.
0 200 400 600 800 1000
2.175
2.18
2.185
2.19
2.195
2.2
2.205
2.21
x 10
4
Time [min]
Power [W]
Measurement Simulation
Figure 14: Linear approximation of the forward power P
f or
.
This LLRF model is linked to the plant model of
Section 3.5 to generate the forward power P
f or
. Since
the first order approximation of the LLRF control is
only very rough, this introduces an additional mod-
elling error, but it should be sufficient for the first
controller approach here. With the assumptions (37)
and (38) this allows us to linearize the nonlinear
model around the operation point
x
gun
=
T
g
x
LLRF
T
1
˜
α
v, f ilt
T
x
T
3
T
, (41)
u = α
v
, (42)
to get a linear model with 6 states, one input u
gun
= α
v
and one output y
gun
= T
g
x
gun
= A
gun
x
gun
+ B
gun
u
gun
, (43)
y
gun
= C
gun
x
gun
+ D
gun
u
gun
. (44)
The state x
LLRF
is the state introduced by the linear
approximation (40) of the behaviour of the LLRF con-
trol. The simulation results of the SISO model and its
linearization are shown in Figure 15 compared to the
HighPrecisionTemperatureControlofNormal-conductingRFGUNforaHighDutyCycleFree-ElectronLaser
315

measurement data and the MIMO model. The simula-
tion shows that the approximation of the LLRF con-
trol by a linear model (40) adds an offset error. An
improvement of the LLRF model could reduce this er-
ror. The fast variations of the gun temperature are not
captured as good as before as well. Linearizing this
model introduces just a small additional error. Be-
cause of that it is possible to use the linear model (43)
and (44) for control.
0 200 400 600 800 1000 1200
60.9
61
61.1
61.2
61.3
61.4
61.5
61.6
Time [min]
Temperature [°C]
T
g
Measurement
T
g
Sim.
T
g
Sim. with LLRF model
T
g
Linearization
Figure 15: Simulation results of the model without and with
LLRF approximation and its linearization.
The theory of MPC is used here according
to, (Maciejowski, 2002) meaning that the linear SISO
model is used by the MP controller to compute opti-
mal input sequences to the plant according to the cost
function
J(k) =
H
p
∑
i=1
kx
gun
(k + i) − r
gun
(k + i)k
Q(i)
+
H
u
∑
i=1
k∆u
gun
(k + i)k
R(i)
, (45)
where ∆u
gun
(k + i) = u
gun
(k + i) − u
gun
(k + i − 1) are
the input changes and r
gun
(k + i) ∈ R
n×1
the state
reference. This means that the states should fol-
low a reference trajectory r
gun
with a certain con-
trol effort ∆u
gun
. The differences of the states
from the reference are weighted by the positive
semi-definite matrices Q(i) ≥ 0 ∈ R
n×n
and the input
changes by R(i) ≥ 0 ∈ R
m×m
at time instance k + i.
The time range of the prediction is denoted by H
p
and
of the input changes by H
u
. At every time instance
the controller solves the optimization problem
min
u
gun
(k+i), i=1,...,H
u
J(k) (46)
subject to 0 ≤ u
gun
(k + i) ≤ 1.
Only the first computed input is given to the plant.
The minimization of the cost function is repeated
at every time instance. This is called moving hori-
zon principle. As shown in (Maciejowski, 2002)
the optimization problem (46) can be formulated as
a quadratic programming (QP) problem with con-
straints and thus solved very efficiently by standard
QP solvers.
5.2 Closed Loop Simulation
In the following the temperature of the RF plant
should be controlled by the MPC in a closed loop sim-
ulation. The controller gets a reference r
gun
for the
states. We are only interested in the gun temperature
here such that only a reference for this temperature
has to be given
r
gun
(k+i)=
T
g,SP
(k+i)
0
.
.
.
0
∈R
6
, i = 1, . . . , H
p
. (47)
The tuning parameters are on the one hand the predic-
tion and control horizons H
p
and H
u
and on the other
the weighting matrices Q and R. Since only the track-
ing of the first state, the gun temperature is of interest
only this one has to be weighted with a factor q. The
factor is chosen the same for all times. This results in
a weighting matrix for the states at time i
Q(i) =
q 0 ·· · 0
0 0 ·· · 0
.
.
.
.
.
.
.
.
.
.
.
.
0 0 ·· · 0
∈ R
6×6
, i = 1, . . . , H
p
.
(48)
The weighting of the input changes is done by a
scalar since the system has one input only
R(i) = r, i = 1, . . . , H
u
. (49)
To achieve a good performance of the overall system,
the controller can be tuned by changing H
p
, H
u
, q
and r. The parameters H
p
and H
u
are related to the
time that the controller predicts the possible future re-
sponses of the plant. The choice of these parameters is
a tradeoff between prediction and computation time.
The parameters q and r can be tuned to get a tradeoff
between tracking and control effort. A higher q leads
to better tracking but more control effort in general.
The reference temperature T
g,SP
used here is equal to
61.35
◦
C. This results in a system behaviour shown in
Figure 16. Here the difference between setpoint and
gun temperature is shown for the simulation of the
MPC and measurement data of the device.
SIMULTECH2015-5thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
316

100 200 300 400 500 600 700 800 900 1000 1100
-0.2
-0.1
0
0.1
Temperature [°C]
T
g,meas
- T
g,SP,meas
T
g,MPC
- T
g,SP,MPC
100 200 300 400 500 600 700 800 900 1000 1100
24
24.5
25
25.5
Temperature [°C]
Time [min]
T
cw
Figure 16: Simulation results of the MPC controller.
In the case where the cold water temperature is
constant the controller holds the temperature well ex-
cept a certain small offset due to model differences. A
change in the cold water temperature directly disturbs
the gun temperature. The standard MPC approach ap-
plied here cannot deal with that, because such distur-
bance is not predictable. The controller has to be ex-
tended with some action for disturbance rejection like
integral action.
6 CONCLUSION
A thermal MIMO model of the RF GUN for FLASH
was derived. The model focuses on the cooling circuit
and the influence of the LLRF to it. Since the struc-
ture of the facility at European XFEL is comparable
to FLASH the structure of the model can be used and
only parameters have to be adjusted.
The RF GUN and the cooling circuit are modeled by
power balances. With that the main dynamics of the
thermal behaviour of the facility are captured. The as-
sumptions that one temperature representing the tem-
perature distribution of the whole RF GUN turned out
to be valid. The parameters of the model were esti-
mated by measurement data. Simulation results show
good fits of the RF GUN temperature dynamics to the
measurement data. In the cooling circuit some differ-
ences between simulated and measured temperature
occur caused by only few measurement information
of the cooling circuit available for parameter identifi-
cation, especially the missing flow information.
With the model a model predictive control approach
is derived in simulation to control the gun temperature
by the cold water valve. A rough approximation of the
LLRF control and a linearization of the model allows
the application of a linear MPC approach. Tuning the
controller by changing the weights of the cost func-
tion and testing it in simulation shows that a predictive
cooling concept can significantly improve the stabil-
ity of the RF GUN operation compared to the current
control concept, i.e. less detuning and therefore less
RF power variations leading to constant power dissi-
pation.
In the future the model predictive control concept
can be further developed by adding constraints, dis-
turbance rejection or a nonlinear approach. An im-
provement of the model would be possible with bet-
ter measurement information e.g. by a mobile flow
measurement. Afterwards the controller could be re-
alized on hardware at XFEL and test can be con-
ducted at FLASH. Additionally the model could be
used for other approaches like model-based fault de-
tection. This makes sense because of the high com-
plexity of the whole free-electron laser facility.
REFERENCES
Altarelli, M., Brinkmann, R., Chergui, M., Decking, W.,
Dobson, B., D
¨
usterer, S., Gr
¨
ubel, G., Graeff, W.,
Graafsma, H., Hajdu, J., Marangos, J., Pfl
¨
uger, J.,
Redlin, H., Riley, D., Robinson, I., Rossbach, J.,
Schwarz, A., Tiedtke, K., Tschentscher, T., Vartani-
ants, I., Wabnitz, H., Weise, H., Wichmann, R., Witte,
K., Wolf, A., Wulff, M., and Yurkov, M. (2006).
XFEL, the European X-ray free-electron laser: Tech-
nical design report. DESY XFEL Project Group,
Hamburg.
FLASH (2013). Free-electron laser FLASH.
Fl
¨
ottmann, K., Paramonov, V., Skasyrskaya, A., and
Stephan, F. (2008). Rf gun cavities cooling regime
study. Desy report, TESLA-FEL 2008-02.
Hoffmann, M., Ayvazyan, V., Branlard, J., Butkowski, L.,
Grecki, M. K., Mavric, U., Omet, M., Pfeiffer, S.,
Schlarb, H., Schmidt, C., Piotrowski, A., Fornal, W.,
and Rybaniec, R. (2015). Operation of normal con-
ducting rf guns with mtca.4. In IPAC - 6th Inter-
national Particle Accelerator Conference, Richmond,
USA. DESY Hamburg, FastLogic Sp. z o.o., Lodz,
Warsaw University of Technology.
Kuchling, H. (1991). Taschenbuch der Physik. Fach-
buchverlag Leipzig, 13. edition.
Ljung, L. (1987). System identification: Theory for the
User. Englewood Cleffs, Prentice-Hall.
Ljung, L. (2001). System Identification Toolbox. The Math
Works.
Maciejowski, J. (2002). Predictive Control with Con-
straints. Pearson Education Limited.
Mathworks, I. (2014a). Simulink Design Optmization
User’s Guide. The Mathworks Inc.
Mathworks, I. (2014b). Simulink User’s Guide. The Math-
works Inc.
Schilcher, T. (1998). Vector Sum Control of Pulsed Acceler-
ating Fields in Lorentz Force Detuned Superconduct-
ing Cavities. PhD thesis, Hamburg University.
Stephan, F. (2015). private communication. DESY.
HighPrecisionTemperatureControlofNormal-conductingRFGUNforaHighDutyCycleFree-ElectronLaser
317
