Routing in Cognitive Wireless Mesh Networks
An Intelligent Framework
Nadhir Ben Halima
1
and Mohammad Ayoub Khan
1,2
1
College of Computer Science and Engineering, Yanbu Branch, Taibah University, Madina Al Munawwarah, Saudi Arabia
2
Department of Computer Science and Engineering, Sharda University, Greater Noida, India
Keywords: CN, SDR, QoS, CR.
Abstract: Wireless Networks are limited in energy and resources, are subject to development constraints. The
difficulties are such as the increasing RF spectrum saturation and efficient path discovery. The Cognitive
Wireless Networks, leaning on a form communication model, develop new strategies to mitigate the
inefficient use of the spectrum. The first application of the concept of cognitivity to communications was
focused on exploiting the dynamics in spectrum utilization (cognitive radio), nevertheless network-wide
deployment of such concepts is foreseen in the framework of the “cognitive networks”, where the cognitive
process will be employed to support end-to-end network-wide goals such as QoS. This paper presents a
state-of-art of cognitive networks and proposes a framework, architecture for cognitive networks. This paper
will also discuss mechanisms for self-adaptation, learning and evolutionary functionalities to support
users/applications end-to-end goals.
1 INTRODUCTION
All the wireless networks use radio waves to connect
devices like laptops, sensors. Nowadays we can see
that these devices have become ubiquitous in nature.
There is a seamless integration with the existing
infrastructure.
The ubiquitous computing is one of the most
important trends in networks with a 40-fold increase
between 2010 and 2015(CISCO Inc, 2011). The
applications include security, surveillance,
monitoring, health, vehicular networks are few to
name. The increased demand for wireless
communication has a big challenge for efficient
spectrum utilization. We also understand that due to
increased demand of devices in 2.4 GHz range, the
unlicensed spectrum bands are becoming
overcrowded (Akyildiz et al., 2006, CISCO, 2011).
To address these challenges in wireless networks a
new technique called ‘Cognitive Radio’ (CR)
(Mitola III, 2000, Akyildiz et al., 2006, Thomas et
al., 2005). CR provides an opportunistic access
mechanism to the spectrum using the concept of
cooperation and context awareness. The spectrum
sensing and cooperation between devices allow for
better utilization of spectrums. The CR has three
main components as shown in figure 1.
Figure 1: Components of Cognitive Radio.
The first component cognitive devices has
capacity in hardware or Software Defined Radio
(SDR).The collaboration component interacts among
terminals while as learning component has the
ability to learn about the pattern and behaviour of
spectrum utilization.
Indeed, many scenarios were proposed, focused
on accessing the spectrum using opportunistic
techniques (Akyildiz et al., 2006, Wang et al., 2011).
However, the possibilities offered by implementing
the cognitive process within a communication
network go far beyond improved spectrum
utilization, as cognitive network (CN) technology
can represent a suitable technology to support user
and application QoS requirements. Thomas et al.,
(Akyildiz et al., 2006, Gunawardena and Zhuang,
2011) defines a cognitive network as a network with
a cognitive process that can perceive current
network conditions, and then plan, decide and act on
the basis of such conditions.
The CN is not a radio network but data network
that makes use of various disciplines of computer
science like knowledge representation, machine
Cognitive
Collaboration Learning
43
Ben Halima N. and Ayoub Khan M..
Routing in Cognitive Wireless Mesh Networks - An Intelligent Framework.
DOI: 10.5220/0005571000430048
In Proceedings of the 6th International Conference on Data Communication Networking (DCNET-2015), pages 43-48
ISBN: 978-989-758-112-0
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
learning and network management to solve some
problems current networks are faced with. The CN
covers all the layers of the OSI model while CR
covers layer 1 and 2 only (Mitola, 2000).
The network can learn from these adaptations
and use them to make future decisions, while taking
into account end-to-end goals. The end-to-end scope
is extremely important and distinguishes cognitive
communications from cognitive networks. Indeed,
there are two levels of cognitivity: at the node level
and at the network level. The end-to-end scope
refers to the collective decision taken by the whole
network to achieve the stated complex goals. Such
end-to-end goals represent the desirable state and
will be reached after a specific set of actions, which
are far too complex to achieve using current
networking solutions.
A CN should be able to decompose the overall
goals into sub-goals and as necessary identify further
dependencies between these sub-goals as the main
benefit of the cognitive learning process.
Starting from the definition, the problem of
designing cognitive networks can then be considered
as a complex, multi-constraint and multi-criterion
optimization problem where a multi-objective
optimization approach should be implemented.
Guaranteeing quality of service (QoS) in
communication networks, particularly in cognitive
mesh networks, represents a typical multi-objective
problem involving simultaneous optimization of the
cost of the communications in the network and
various performance criteria such as: throughput,
average delay of the network, etc. The optimization
of one or more of such metrics is the main objective
of design in most cases, in order to make the
network efficient and possibly adaptable to different
operating conditions.
In this paper, we define a framework for the
design of Cognitive Wireless Mesh Networks
(CWMN), which implements and instantiates the
concepts of CN in a specific scenario where self-
adaptation is a key feature. The goal of such
networks is to foster self-adaptation and to extend it
beyond “simple” topology or resource management
in order to support end-to-end goals by exploiting
conceptual similarities with biological systems.
The structure of the paper is as such: Section 2
introduces the CWMN reference model and related
work on the topic, while Section 3 discusses the
proposed architecture in terms of main modules and
functionalities required. Section 4 concludes the
paper with final remarks.
2 CWMN REFERENCE MODEL
Wireless mesh networks are attracting a great
amount of attention
from networking researchers as
a promising technology for the next generation
access infrastructure, especially due to their
scalability and self-organizing features (Akyildiz et
al., 2005).
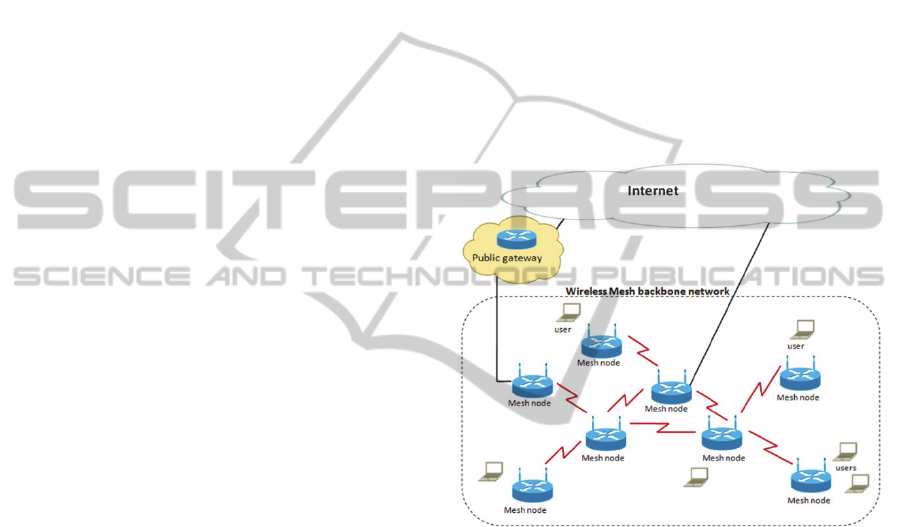
A wireless mesh network (WMN) is a mesh
network that is built using wireless access points
(AP) installed at each network user's location. Every
node in the network also acts as a provider to
forward data to the next node. The networking
infrastructure is decentralized and simplified. Each
node needs in WMN only to transmit the data to the
next node as shown in figure 2.
Figure 2: Wireless Mesh Network.
However, due to their distributed nature and
heterogeneity of access technologies, QoS
provisioning, and in general traffic engineering,
represents a challenging issue, involving several
functionalities at different layers of the protocols
stack: routing at layer 3, resource allocation and
reservation at layers 2&3, etc. In a cognitive
network approach, QoS should be granted by self-
adaptation, flexibility and situation-awareness of
network elements.
As a consequence, the characteristics of CNs
clearly represent desirable features on which to
implement completely autonomous and self-
adaptable wireless mesh networks.
The following paragraphs introduce the concept
of Cognitive Wireless Mesh Network as a Wireless
Mesh Network gaining biologically-inspired features
from the Cognitive Network paradigm, with the aim
of bringing the capability of the former to the next
DCNET2015-InternationalConferenceonDataCommunicationNetworking
44

level by introducing the possibility of autonomously
addressing end-to-end requirements and constraints.
In such a dynamic environment, two
requirements should be taken into consideration for
network control: scalability and mobility, as the
network should be aware of nodes joining and
leaving the system at any time and of their impact on
the performance and other operating parameters of
the network.
Such a lively scenario has significant similarities
with biological systems or colonies, and as a
consequence biologically-inspired approaches can
be considered as promising references due to the fact
that they are highly capable of self-adaptation and
especially evolution, even though relatively slow at
adapting to the changes in the environment.
Adding cognition to the existing WMN
infrastructure will bring about many benefits. In
order to pursue this idea, the paper proposes a
framework to support the design, implementation of
CWMN based on ideas such as evolutionary
programming in bio-nets and multi-agents and
actually starts to bridge the gap between conceptual
similarity and actual design.
The biologically inspired techniques in
information technology is not a new, many attempts
have been concentrated in the area of optimization
(Yu et al., 2010). However we can learn
considerable lessons from biological systems and we
have mainly to concentrate on the adaptability,
scalability, self-organizational and robustness
properties of such systems. Studying the symbiotic
nature of bio-systems can result in obtaining a
beneficial understanding on the behaviour of
distributed systems. Many key factors may be
observed in bio-systems like self-organizational
behaviour which can be considered as the most
important property describing systems consisting of
autonomous entities (ants, bees, etc.). These systems
tend to group together into certain structures very
similar to biological systems where overall state of
the system depends on individual behaviours and its
collection. In general, four basic principles can be
seen in the self-organizational property of bio-
systems which have to be introduced in our
proposed architecture.
First, positive feedback involves reinforcement
to enable the system to evolve, and to promote the
creation. Also, positive feedback behaves as
amplifier for a desired outcome, whereby negative
feedback is to influence from previous adaptations
which were not successful.
Second, bio-inspired systems, in general, do not
rely on any global control unit, but operate in an
entirely autonomous and distributed way. Whereby
the individual units acquires the information,
processes and stores locally. However, in order to
generate a self-organized structure, entities need to
interchange knowledge with each other; either by
direct or indirect interactions among them. Also,
self-organized structures relies on randomness and
fluctuation to enable the discovery of new solutions
and to boost the resilience and the stability of the
system.
Third, self-organization is also seen in swarm
cognition. In biological systems, the intelligent and
well-organized behaviour of insects can often be
observed. For instance, ants solve complex tasks,
like nest-building or food-collection, by delegating
simple tasks to each other. In such emergent
systems, it is the collective work of all single
activities that determines the outcome and not the
individual work. Such a behaviour is usually
referred to as swarm cognition (Yu et al., 2010).The
collaboration of insect societies is based on a
process in which a group of workers is assigned
specialized tasks in parallel in order to increase the
efficiency of the swarm(Yu et al., 2010). All insect
types have a division of labour which can be seen in
its 'organizational structure' that consists of workers
of different reproductive castes and layers. In Ants
colony, the insect is not aware of the global
conditions but gains the input only by interactions
with other members of the species that are locally
close within the rank in the 'structure'. This process
may occur either by direct contact or indirect
interaction. Direct contact can be chemical or visual
while in the indirect interaction, one entity
influences the environment while another responds
to that change later on. For instance, Ants
communicate with each other using pheromones that
other ants follow, thus, reinforcing changed pattern.
This mechanism of indirect coordination is called
stigmergy.
Summarizing, we propose to build a framework
for self-organizing cognitive wireless mesh networks
inspired by the above observations.
3 PROPOSED ARCHITECTURE
The network consists of mesh routers, mesh clients,
WiFi, Sensors, cellular network, conventional clients
and internet as shown in figure 1. This presents the
typical topology of a hierarchical Wireless Mesh
Network.
The proposed architecture aims at providing
global control of the topology using a distributed
RoutinginCognitiveWirelessMeshNetworks-AnIntelligentFramework
45

control scheme, where nodes are hierarchically
organized in groups or clusters. In our proposed
framework, the group formation and cluster
interconnection is performed in a distributed and
dynamic way. Assuming that at boot time, each node
receives a unique identifier, the election of the head
(H) of the cluster is performed. This process could
be performed by exploiting group formation
algorithms available in the literature for ad hoc
networks, such as (Lin and Gerla, 1997) or by
identifying specific algorithms for mesh networks
(i.e. to exploit higher capacity of mesh routers). The
choice of a specific clustering algorithm is out of the
scope of the paper.
Figure 3: Hierarchical WSN (Akyildiz et al., 2005).
In this framework, cognitive nodes perform local
adaptation, and such behaviour should be
coordinated and optimized to better maintain a
desired global state and achieve end-to-end QoS
guarantees.
Figure 4: Cognitive Node.
Each node receives local input from the
surrounding nodes and provides information about
its current capabilities. By using such information,
the nodes should organize themselves into a
cooperative system.
The proposed approach involves a reformulation
of the end-to-end QoS provisioning problem into a
distributed artificial intelligence problem, in which
cognitive mesh nodes coordinate parameters settings
to maintain the desired goals.
3.1 Problem Statement
The nodes are cognitive, i.e. able to sense their
environment and act intelligently and cooperatively
to achieve a desired global behaviour. More
specifically, nodes can learn to organize themselves
in clusters to increase overall throughput and reduce
the signalling overhead.
In this framework, the end-to-end QoS
provisioning problem can be translated into a
distributed artificial intelligence problem, where
each cognitive node is an agent in a multi-agent
system. Nodes interact with each other by competing
for resources and also by coordinating the access to
the resources to reach a satisfactory state, which is
continually updated. This behaviour represents the
design objective of cognitive networks, i.e. cognitive
nodes are always coordinating and optimizing
towards an ‘unknown’ global optimal state which
does not exist in reality since it is nothing but an
optimal state in a time t and for a given topology due
to the dynamicity of the topology. Each action taken
by a node is local in nature, and may not produce
any noticeable benefit to the node itself.
Collectively, however, the local actions can improve
the global performance of the system.
For example, yielding a resource to a node which
has to deliver urgent (high priority) traffic does not
produce any local benefit to a node, but it does
increase the overall throughput.
Ensuring global QoS provisioning can be seen
from different points of views: at the node level and
network-wide. The network aims at providing QoS
while maximizing the resource utilization, whereas
nodes’ goal is to maintain high throughput for
packets waiting in its queues.
Indeed, the global performance of the network
that should be maximized can be defined as a
function of several parameters:
P
g
lobal=
f (P
1
, P
2
, … Pi) (1)
Approaches available in the literature aim mainly at
providing the optimal (static) solution given specific
constraints on network setup and complete “a-priori”
knowledge of traffic characteristics and
requirements, or at decomposing the problem within
uniform independent domains (e.g. DiffServ
domains). On the contrary, the main goal of the
proposed Cognitive Wireless Mesh Network is to
perform distributed optimization of the performance
functional while continuously adapting to changing
characteristics of the network and traffic.
DCNET2015-InternationalConferenceonDataCommunicationNetworking
46

3.2 The Proposed Approach
On the basis of the above discussion, the CWMN
can be considered as an evolving autonomous
system that aims at reaching the optimal status,
which is represented by maximization of function
P
global
. The network will be dynamically partitioned
into clusters, whose heads (H) will be able to
interact to exchange and build global knowledge.
As a consequence, awareness of global end-to-
end goals will be provided by cluster head nodes
through inter-cluster signalling, while local
optimization actions will be performed through
intra-cluster interaction.
3.3 Modules and Functionalities
- Input Goals : Parameter to optimize
- Routing Engine : distributed optimization
algorithm
- QoS Engine : To guarantee QoS Parameters
- Reasoning and Learning Engine : For best
actions
- Knowledgebase: For Best decisions
Figure 5: Proposed framework.
The proposed framework has input a goal that is
described using a set of input parameters (P
1
, P
2
,
P
3
…P
i
). This is the global parameters. The
architecture has learning and reasoning engine to
deduce best decisions about the routing.
The knowledge based is the collection of
historical data, states and actions that has been taken
in the past. The historical data, states and action help
in taking right decisions. In order to guarantee the
quality we have a QoS engine that ensures quality
during end-to-end transmission.
The routing decisions and path are collectively
computed based on the input parameters from
different components of the proposed architecture
like knowledge base, learning engine, reasoning
engine etc.
4 CONCLUSIONS
In this paper we have discussed that increased
demand for wireless communication which has a big
challenge for efficient spectrum utilization. To
address these challenges in wireless network a new
technique called Cognitive Radio (CR) (Mitola III,
2000, Akyildiz et al., 2006, Thomas et al., 2005) has
been discussed in many literatures. We also
understand that CR provides an opportunistic access
mechanism to the spectrum using concept of
cooperation and context awareness. Since Wireless
Networks are limited in energy and resources, this
makes them subject to development constraints. We
have presented an exhaustive state-of-art of
cognitive networks and proposed a framework,
architecture for cognitive networks. The proposed
architecture has learning and reasoning engine to
deduce best decisions about the routing. We also
proposed a QoS engine to ensure quality during end-
to-end transmission. As a future work, we will
simulate the proposed architecture to demonstrate
the effectiveness.
REFERENCES
Mitola III, J, 2000. Cognitive Radio: An Integrated Agent
Architecture for Software Defined Radio, PhD thesis,
Royal Institute of Technology, Sweden.
Akyildiz, I., W. Lee, M. Vuran, and S. Mohanty, 2006.
“Next Generation/Dynamic Spectrum
Access/Cognitive Radio Wireless Networks: A
Survey,” Computer Networks, vol. 50, no. 13, pp.
2127–2159.
Thomas, R. W., DaSilva L. A. and MacKenzie, A. B.,
2005. Cognitive networks. Proceedings of the IEEE
Symposium on New Frontiers in Dynamic Spectrum
Access Network(DySPAN), November, Baltimore,
MD, USA.
Lin, C. and Gerla, M., 1997. Adaptive Clustering For
Mobile Wireless Networks,” Selected Areas in
Communications, IEEE Journal on, vol. 15, no. 7, pp.
1265–1275.
Amr El-Mougy and Mohamed Ibnkahla, 2013. A Cross-
Layer Framework for Network Management in
Wireless Sensor Networks Using Weighted Cognitive
Maps Hindawi Publishing Corporation, International
Journal of Distributed Sensor Networks, Article ID
RoutinginCognitiveWirelessMeshNetworks-AnIntelligentFramework
47

568580, 18 pages, http://dx.doi.org/10.1155/2013/
568580.
CISCO System Inc., 2011. Cisco visual networking
index: global mobile data traffic forecast update,
2010–2015.
Mitola, J., 2000. Cognitive Radio: An Integrated Agent
Architecture for Software Defined Radio,” Ph.D.
dissertation, Royal Inst. of Tech., Sweden.
Akyildiz, Ian F., Xudong Wang, Weilin Wang, 2005.
Wireless mesh networks: a survey, Computer
Networks, Volume 47, Issue 4, 15, Pages 445-487,
ISSN 1389-1286,
http://dx.doi.org/10.1016/j.comnet.2004.12.001.
Barıs¸ Atakan Ozgur B. Akan, 2007. BIOlogically-
inspired Spectrum Sharing in Cognitive Radio
Networks, IEEE WCNC ,pp43-48.
Yu, F. Richard et al., 2010. Biologically Inspired
Consensus-Based Spectrum Sensing in Mobile Ad
Hoc Networks with Cognitive Radios, Network, IEEE,
May/June, pp 26-30.
Akyildiz, Ian F. et al., 2005. A Survey on Wireless Mesh
Networks, IEEE Radio Communications, pp. 23-30.
Gunawardena, S. & Zhuang, W, 2011. Capacity analysis
and call admission control in distributed cognitive
radio networks. Wireless Communications, IEEE
Transactions on, 10(9), 3110–3120.
Wang, H., Ding, L., Pan, Z., Liu, N., & You, X, 2011.
QoS guaranteed call admission control with
opportunistic scheduling (pp. 1–5). In Global
telecommunications conference (GLOBECOM 2011),
IEEE.
DCNET2015-InternationalConferenceonDataCommunicationNetworking
48
