Community Driven Artificial Intelligence Development for Robotics
Csaba Kertész and Markku Turunen
Tampere Unit for Computer-Human Interaction (TAUCHI), University of Tampere, Kalevantie 4, Tampere, Finland
1 RESEARCH PROBLEM
The robotics have been advanced greatly along with
the computer technologies since the 20th century
and the improvements in hardware components
enabled the development of complicated mobile
robots. Grey Walter and Valentino Braitenburg
(Iizuka, 2004) developed simple wheeled robots to
traverse their environment with light sensors, but
these systems were inflexible and non-
reprogrammable. To overcome the closed world
assumption in planner systems in the 1970s, the
behavior-based robotics were invented by Rodney
Brooks (Brooks, 1991) to shift the emphasize to
sensing and acting within the environment. The
recent consumer robots have been followed Brooks'
architecture, but the increasing behavior complexity
of these systems is hard to maintain with the human
resources in a company. The online community-
based artificial intelligence development can solve
this problem by distributing the efforts across
multiple parties (Hibbard, 2008), however,
comprehensive studies have not been not available
about the requirements and good practices for this
process to the best knowledge of the authors.
AIBO was a brand of entertainment robots, but
Sony discontinued in 2006. It was a very successful
robot platform both in research labs and consumer
market. An active community of enthusiastic AIBO
owners is still around the world with their own
repair services for hardware faults and damages
what shows how strong is this platform. This PhD
Figure 1: Sony ERS-7 robot.
research attempts to create a special online
community for building a new artificial intelligence
(AI) software for Sony ERS-7 robots (Figure 1) as a
case study to explore new ways of modern AI
development.
The following question is addressed in this
research:
How can an online community be built and
involved to develop an artificial intelligence
for robotics?
2 OUTLINE OF OBJECTIVES
Two objectives are linked to online community
involvements in artificial intelligence creation:
1. Find working strategies to build a successful
community for AI development with the open
source model, crowdsourcing and other state
of the art methods.
2. Search for work distribution methods to
involve community members for developing
certain AI parts according to their skills.
3 STATE OF THE ART
Although the online AI forums were examined
earlier to understand the owner attitudes toward their
robots (Friedman et al, 2003; Kahn et al, 2004) and
the performance of distributed volunteer project
techniques was researched (Krafft, 2005; Porter et
al, 2006), but the literature lacks a specific study to
cover AI development with online communities.
Open source software (OSS) is a classic case of
community based innovation with more than 20
years-long history. An OSS project consists of a
volunteer group of geographically distributed
experts who contribute to a software project based
on internet communication. The normal users are the
largest fraction of a community and some active lead
contributors drive the new value creation. The
software industry has been recognized the
opportunity to organize online communities around
3
Kertész C. and Turunen M..
Community Driven Artificial Intelligence Development for Robotics.
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

their products where the people are involved in
discussion of new innovative ideas (Franke and
Shah, 2003), solving product related problems or
getting product design concepts (Von Hippel and
Katz, 2002).
Yan and Wang (Yan and Wang, 2013) proposed a
Crowdsourcing Based Community Development
(CBCD) model for a Chinese software company
(Huazisoft) to involve online community members
into the implementation and testing phases of several
commercial projects. Although they run a selection
procedure for candidates, the community team was
simply hired in their free time for lower wages
similar to outsourcing. Their model had copyright
risks and the community members sometimes left
the project because of their loose connections with
the company.
The OSS is an appealing choice for the research
projects. OpenCog, an open source AI framework
aims to develop an artificial general intelligence as
an emergent phenomenon of multiple subsystems
(Hart and Goertzel, 2008). This project was started
six years ago and their code repository contains
around 148000 lines of C++ codes. Since their
system components rely on complex theories, the
contribution is not a scope for anybody, but AI
researchers and professionals. The free Stratagus
engine (Ponsen et al, 2005) is another specialized
software for AI researchers and game developers to
create real time strategy games. The software of a
successful humanoid robot was open sourced by the
Aldebaran Robotics in 2011 (Nao, 2011), but the
community contributions to Nao's AI engine have
not been analyzed by researchers yet.
The crowdsourcing can obtain services, ideas or
contents by collecting contributions from a large
community. The Amazon Mechanical Turk service is
used by companies and researcher teams to perform
simple microtasks in parallel with unqualified
people for pecuniary rewards although some critical
thoughts were raised that using this method for
scientific research with such low payments is not
ethical. One of the most successful type of voluntary
participation for science is to give the unused CPU
and GPU cycles of a desktop computer for scientific
computing when it is left in idle. The popularity of
this option comes from the easy setup steps and low
maintenance needs for the regular users. Over 60
projects operate under the umbrella of BOINC
infrastructure from disciplines of astronomy,
physics, mathematics, medicine, biology and
chemistry (Anderson, 2004). The Zooniverse is a
citizen science web portal run by Citizen Science
Alliance. Volunteers contribute for free to projects
from astronomy, ecology, cell biology, humanities
and climate science (Simpson et al, 2014). The latter
organization shows a model how people can be
involved to sacrifice their leisure time for scientific
research driven by enthusiasm and field of interest.
Some examples above represented that the OSS
model is very popular and made some traction in
some research fields, but the current PhD research is
essential because the development involves both
technical and non-technical people into the artificial
intelligence creation. The open source model and the
transparency of the AI development ensure that the
design can be examined for flaws by as many
intelligent humans as interested in. These are key
advantages for open source AI development
(Hibbard, 2008) as natural worries can arise in the
humans against dangerous robots. The
crowdsourcing is an emergent field for several
research fields to get great contributions from the
public masses, and combined with OSS model, an
interesting experiment will be done during this PhD
research to build a new AI.
4 METHODOLOGY
4.1 Open Source Software Model
The AI development mus implement an open and
transparent process mentioned in the next section as
people contribute for OSS with higher chance than
to a project with a more restrictive license
(Crowston et al, 2012).
Although the practice of open source model has
been increased in the research software development
for artificial intelligence fields like Dlib in machine
learning (King, 2009) and OpenCV in computer
vision (Bradski and Kaehler, 2008) as well as this
model has obvious advantages, but several empirical
studies revealed some challenges. Since the OSS
projects emerge from individual needs, most of them
are developed by small, isolated teams. By analyzing
the projects on sourceforge.net, a study found that
many are inactive or never publish any releases and
the majority have only two or less developers
(Christley and Madey, 2007). The openhub.net
claims that half of the OSS projects in their database
are individual efforts. Consequently, these projects
are mainly developed by one or a few persons rather
than by a dynamically changing open community.
When the lead users stop the contribution after
losing interest or personal reasons, the project can go
in hibernation easily until a new developer is
attracted to continue the leadership.
ICINCO2015-DoctoralConsortium
4

4.2 Community Involvement
A review paper (Crowston et al, 2012) examined the
heterogeneous OSS contributor motives and they
concluded that the reputation and the rewards are
important extrinsic motivations while the fun,
sharing and learning opportunities are intrinsic. The
motives are changing over time because once the
personal needs are fulfilled with the initial
development, the participation must transform into a
hobby to keep up the engagement. Other community
properties are also essential to drive a successful
project like leadership, interpersonal relationships
and taking advantage of the cultural diversity.
The users spend 1.7 hours with an OSS project
daily on average, the project leaders invest more
time and bug fixing takes less hours (Crowston et al,
2012). The remunerated developers contribute more
than others without any material compensations and
their commitment is less dependent on the intrinsic
motivations.
A community must be engaged to contribute for
a project and the key contributors need to know
several important factors to lead the project for a
longer period:
What is the size of the community?
Which capabilities of the members are
suitable for contribution?
Which goals can motivate the members to
create new value?
What kind of actions can keep the community
active and alive in long-term?
These questions can be answered by executing
questionnaires to get know the community and the
existing experiences of the OSS model must be
applied in the community building.
The primary meeting point of the AIBO
enthusiasts is the forum on aibo-life.org. The PhD
research targets the creation of a special community
inside aibo-life.org to build a new artificial
intelligence for Sony ERS-7 robots. The following
ideas are under consideration to reach this goal:
Run a questionnaire among the forum
members to get a view about the community
of aibo-life.org and future expectations for a
new Sony ERS-7 software.
Develop a minimal AI for Sony ERS-7 to get
the initial attention of the forum members.
Open and transparent AI development.
Build reputation among the forum members.
Quick responses to problems, requests in the
forum.
Get a dedicated area inside the forum where
problems of the new AI can be discussed.
Involve members in the development with
tasks, polls, competitions or brainstorming.
Keep the project going for a longer time.
Analyze other online robotics communities
and integrate their ideas.
The first author will try to get into the Google
Summer of Code
1
(GSoC) in 2016 as a
mentor and check how effective is a student
contribution.
As it can be seen above, multiple tasks must be
accomplished to build a successful community.
4.3 Modern Software Development
Tools and Practices
Existing software solutions have been adapted to the
robot dog, but many functions had to be
reimplemented. A challenge in this situation that the
AIBO owners must be attracted with never-seen
features compared to the official AIBO Mind
software to gain interest for contribution.
The software industry invented a number of
technologies and processes to ensure the quality of
complex applications, but these techniques are not
often used in the research labs. When a robot is
developed with many behaviors, any small change
can trigger unexpected failures in the operation and
this problem will be addressed during the PhD
research with good practices from the software
industry:
Task list with priorities and estimations.
Modular software design.
Tests for the core modules.
Test the robot AI as a complete system.
Follow some source code metrics over time.
Check the source code with static code
analysis tools.
Use tools to detect memory handling errors.
Check the compilation for each supported
platform.
4.4 Crowdsourcing
The first author believes in a more strict meaning of
crowdsourcing than the CBCD model (Yan and
Wang, 2013), namely, driving a team selection
process in a community for a specific job is far from
a distributed task execution. Therefore, the
crowdsourcing in this research is a voluntary data
1 https://www.google-melange.com
CommunityDrivenArtificialIntelligenceDevelopmentforRobotics
5

Figure 2: History of source code lines (blue), comments (dark gray) and blank lines (green) in the AiBO+ project. The
diagram was created by the Open HUB service.
contribution of sample data to solve machine
learning problems.
The main idea for this direction is that the robot
owners will run the new AI software on their robot
dogs to record samples for different problems and
the collected data are shared with the author to carry
out scientific analysis. The user will get a
notification on an application user interface when
these contributions are uploaded, but reward
mechanisms like point systems are not under
considerations yet.
5 EXPECTED OUTCOME
This PhD research will be successful if multiple
AIBO community members can be involved in the
artificial intelligence development and their work
will be included into the AiBO+ project. An
exceptional result would be to find members with
long standing commitments which would ensure the
sustainable development after PhD studies.
The long-term experiences of this study can be
used in artificial intelligence development for new
products in the future to distribute the efforts
between company employees and online volunteers.
This work sharing is required because of the high
complexity of the robots nowadays. The expected
outcome is the case study of practical processes and
methods to involve online community members with
diverse skills for build a new AI.
6 STAGE OF THE RESEARCH
6.1 Preliminary Work
An established software basis and a minimal AI
engine had to be developed before this PhD research
to have enough offering for community building.
The first author started the work with a Sony
ERS-7 robot five years ago and he registered the
AiBO+ project
2
on the sourceforge.net. After
examining the available developer options, the
Open-R SDK with C++ support was chosen as
development platform which was released by the
Sony with gcc toolchain for low level AIBO
programming. Although a Open-R developer has full
access to the sensors, motors and wireless
connection, the Sony did not include any higher
level functions (e.g. face recognition, locomotion or
environment mapping). An other problem was the
old gcc 3.3 in the original Open-R SDK what made
cumbersome to compile modern C++ sources
without a proper compiler support for 1998 ISO C++
standard.
An upgrade to the Open-R toolchain was
necessary to solve these problems, but the Sony
robots do not have a Unix-like system and the
application loader is encrypted into the Aperios
environment. After five months of trial and error, the
gcc suite was updated to version 4.1.2 (Kertész,
2013) which can build state of the art software like
the latest versions of OpenCV (Bradski and Kaehler,
2008) and Boost (Schaeling, 2014).
The lower level functions were implemented in
the past five years:
AIBO (Open-R SDK), Windows (MinGW),
Ubuntu Linux (gcc, clang) and Android
(NDK) support.
Wireless communication between a robot and a
PC to transfer camera image, sensor data and
log messages. The received data is recorded
for further analysis and testing (Kertész,
2010).
A behavior-based architecture was developed to
control the motor joints, LEDs and
implement higher level functions (Kertész,
2012).
2 http://aiboplus.sf.net
ICINCO2015-DoctoralConsortium
6

Floor surface detection was explored based
on accelerometer and paw sensors (Kertész,
2014).
An Ubuntu PPA
3
was set up to grant free
and easy access to the updated Open-R
SDK and AiBO+ components.
OpenCV and many machine learning
methods (classifiers and regression
methods) are integrated.
An AMD FX 8350-based eight-core
desktop PC was built to run machine
learning tasks.
6.2 Community Building
The Nao humanoid robot of Aldebaran Robotics has
an online community which was created for similar
purposes like this PhD research for Sony ERS-7.
Inasmuch as there is no study about the community
experiences of the Aldebaran Robotics, the first
author will contact the company to get some
knowledge by interviewing their employees.
The author run a questionnaire in the forum
members of aibo-life.org in April 2014 to get an
impression about the present state of the AIBO
community. 50 responses were received and the
preliminary results suggest the following:
Majority of the users do not have any
technical or engineering background thus
they are not potential contributors to develop
the C++ sources.
Half of the users are interested in to create
new tricks for the robot if a motion editor
software is available. These contributions
require little technical knowledge, but more
creativity, imagination and patience.
Taken into account these points, the author
worked on a first public release of the AiBO+
project to attract the community whose members do
not care about the technical details, but the visible
AI capabilities and connectivity options. This initial
offering was implemented with these features:
Transitions between basic poses.
Locomotion: walk, turn.
Turn over from upside down.
Floor surface recognition.
Happy responses for petting.
Angry responses for poking.
Avoid downward stairways and objects in
front.
3 https://launchpad.net/~csaba-kertesz/+archive/aiboplus
Intelligent LED brightness levels and volume
level control.
A dedicated application under Windows,
Android and Ubuntu Linux.
The artificial intelligence can provide these
functions based on 71000 lines of C++ codes (Figure
2) and 1400 lines of Qt Modeling Language (QML)
as of April 2015. According to the analysis of
openhub.net, the AiBO+ project has an established,
mature codebase and an estimated 20 years of effort
with COCOMO model. Nevertheless, the first author
is the sole developer of the AiBO+ hosted on
sourceforge.net and the project can go in hibernation
when he stops the contribution. The sources are
developed in a public Git version control from the
beginning to minimize this risk and C++ sources are
well documented, 29% of the code lines are
comments.
An earlier review paper (Crowston et al, 2012)
found that the OSS developers are predominantly
from USA and Europe, and similarly, the
questionnaire for the English speaking AIBO
community found that vast majority of the members
live in the Western countries (60% in North-
America, 32% in Europe), a small percentage is in
Asia and Australia. This homogeneous cultural
background can ease the planning of a community
development according to Section 4.2. Since most
Japanese people do not speak English at all, but they
have great traditions in the robotics, a Japanese
version of the survey will be executed in the future
to compare the differences between Japanese and
Westerners.
Some results can be concluded about the
downloads of the initial offering. Although the
SourceForge site reports 11 downloads for both the
Windows installer and the memory stick image after
two weeks, the installations can not be followed for
Linux because of the Ubuntu PPAs lack these
statistics. An interesting finding was that the
Windows installer was mostly downloaded from
Asia (45%) and even Europe (36%) predominated
the American downloads (18%). Contrary to these
results, the memory stick image was downloaded
mainly from Europe (66%) and North-America
(34%), but nobody downloaded from Asia. The
AiBO+ Client application for Android was
downloaded from Google Play to a few devices
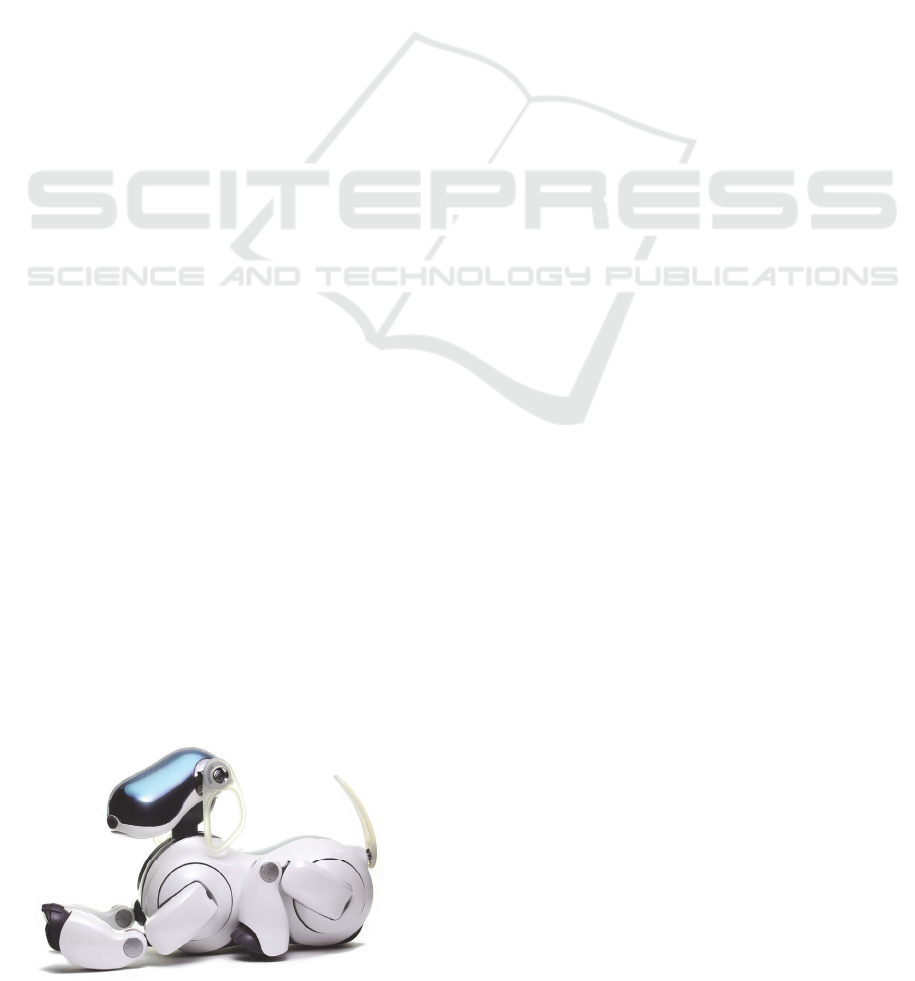
(Figure 3) and the installations are divided by half
between Europe and North-America. These low
download numbers can be explained so that the
robot owners do not put much efforts to set up the
wireless network for AIBO because the official
AIBO Mind software requires the connection only
CommunityDrivenArtificialIntelligenceDevelopmentforRobotics
7
Figure 3: Installation history of AiBO+ Client on Google Play.
for extra features. Secondly, the current AiBO+
software is not released for Apple electronics (iOS,
Mac OSX) though these products are popular in
North-America where the majority of the AIBO
owners live. The iOS support was a strong wish in
the responses to the AIBO questionnaire, but the Qt
Framework, which is the software basis for the
graphical user interface, is not mature on iOS yet. To
summarize, the initial download counts are good in
overall, compared to the small size of the AIBO
community.
Despite the small amount of users, the AIBO
forum members have been involved in several
activities so far:
An AiBO+ compatible version of a
community developed motion editor software
(Skitter
4
) for Sony robot dogs.
Polls were executed before the AiBO+ initial
software release about some software features
and how the owners use their Sony ERS-7s.
Voice acting for the AiBO+ software.
3D printing accessories (Figure 4) for the
Sony robots.
Figure 4: 3D printing model of Sony ERS-7 station pole
5
.
4 http://www.dogsbodynet.com/skitter.html
6.3 Software Development Practices
Usually, the OSS projects have TODOs or they use
their bug tracker to have a list of feature requests
with severity levels. The first author schedules the
tasks of AiBO+ with an agile management tool
(PivotalTracker). The bugs and upcoming features
are represented as stories in one week-long sprints,
relative points show the time estimation for each
story and the story listing order determinates the
priorities.
The modular software design is necessary to
maintain a growing project and add new features
with minimal efforts. The AiBO+ is coded in C++
language and the components are split by
functionalities:
libmindcommon: This library contains the
common functions for the other modules.
libmindaibo: The behavior based robot brain
for AIBO with motor control and machine
learning.
libmindsession/libmindpiece: These modules
can connect to AIBO, transfer the robot state
to PC and simulate the robot brain with the
downloaded data on the laptop later.
libmindeye: Image processing library.
The average OSS projects do not put emphasize
on the software quality except manual testing or unit
tests because they are time consuming practices.
Since the non-Unix operating system (Aperios) in
Sony ERS-7 crashes easily and the memory
resources are limited (64MB), rigorous testing
practices and software validation were introduced in
the AiBO+ development process.
Due to the project supports the multiplatform
compilation, all components can be built and run on
the host computer excluding a glue layer for the
robot. Component tests are written for every
5 http://kecsapblog.blogspot.fi/2014/09/sony-ers-7-charging-
station-pole-model.html
ICINCO2015-DoctoralConsortium
8

software module and executed on the host computer.
As mentioned in Section 6.1, the robot states of a
runtime session can be recorded, transferred to a
computer via wireless network and used for
simulation. As more complex behaviors are
implemented for AIBO, new test cases (session
tests) are defined how the robot reacts in a certain
situation. When a new session test is acted by the
robot, the runtime is saved and the subsequent AI
simulations with the recorded data must produce the
same outcome on the host computer. The component
and session tests verify that new changes do not
break the existing behaviors.
Open source programs can check the source
codes for correctness. Valgrind
6
is a programming
tool for memory debugging, memory leak detection
and profiling. In the AiBO+ development, the
component and session tests are run with the
valgrind's memchecker module to avoid any invalid
read or write in memory accesses and memory leaks.
Other memory tools were also integrated in the
project successfully, including AddressSanitizer
7
tool for Clang compiler and callgrind, helgrind in
valgrind. One of the best available free static code
analyzer is the Clang Static Analyzer
8
to keep the
sources error-free and adding a new tool is planned
for checking the includes in the C++ sources in the
future. A candidate is the open source include-what-
you-use
9
, a backend for the Clang compiler.
A continuous integration system
10
(Jenkins) was
installed on a computer to validate the new
modifications with multiple steps before merging
into the main software stack. First, the new revision
is compiled for all supported platforms to detect any
compilation problem, the component and session
tests are run with the previously mentioned memory
checks to avoid any memory handling error, and
finally, the source code metrics are calculated for
trend diagrams in Jenkins.
After the initial AiBO+ software release was
published in April 2015, only two software bugs
were found by the community members. The
software crashed when the WLAN switch was off on
the Sony ERS-7 and the Mac OSX could corrupt the
directory names when the AiBO+ software image
was copied to a memory stick. Both problems were
fixed in a few days and a new version with hotfixes
was uploaded to the project site on SourceForge.
6 http://valgrind.org
7 https://code.google.com/p/address-sanitizer
8 http://clang-analyzer.llvm.org/
9 https://code.google.com/p/include-what-you-use
10 http://aiboplusci.privatedns.org
These quick response times build the trust among
the community members.
6.4 Crowdsourcing for Machine
Learning
The machine learning samples are collected on the
robot and they are transferred to an AiBO+ Client
(Figure 5) application running on Windows, Linux
or Android via the local wireless network. These
samples are completed with the owner name and
email address and they are uploaded to the AiBO+
Cloud what is stored inside a noSQL Enginio
database in the Qt Cloud Services. Finally, the
samples are downloaded by the author and they are
removed from the cloud.
Figure 5: AiBO+ Client application under Ubuntu Linux.
The above mentioned process must be implemented
with transparency and guaranteeing the privacy of
the contributing users. Since all AiBO+ components
are open source if any credential for the cloud
services are included in the sources, anybody can get
unauthorized access to the contributed data. The
problem was solved as follows:
1. The sensitive data (name, email address) are
encoded with RSA algorithm with a shared
public key before uploading to the AiBO+
Cloud. The private key, which must be
available for decoding, is kept private by the
first author to avoid any 3
rd
party access.
2. The regular users are restricted to upload new
data to the cloud, but the first author can
delete the downloaded samples. The
credentials for this privilege are secret.
A preliminary work was done on floor surface
CommunityDrivenArtificialIntelligenceDevelopmentforRobotics
9

detection before starting the PhD studies (Kertész,
2014) and these results were polished and included
in the AiBO+ software. The recognition rate is
around 90% and the samples are being collected to
improve the model and verify the accuracy in real
environments.
In the future, the crowdsourcing is planned for
power savings in the robot functions, anomaly
detection during locomotion and sound event
recognition.
REFERENCES
Anderson, D. P., 2004. BOINC: A System for Public-
Resource Computing and Storage. Proceedings of the
5th IEEE/ACM International Workshop on Grid
Computing.
Bradski, G. R., Kaehler, A., 2008. Learning OpenCV. 1st
Edition, O'Reilly Media.
Brooks, R. A., 1991. Intelligence Without Representation.
Journal of Artificial Intelligence, Vol. 47, pp. 139-159.
Christley, S., Madey, G., 2007. Analysis of Activity in the
Open Source Software Development Community. In
Proceedings of the 40th Annual Hawaii International
Conference on System Sciences.
Crowston, K., Wei, K., Howison, J., and Wiggins, A.:
Free/Libre open-source software development: What
we know and what we do not know, Journal of ACM
Computing Surveys, Vol. 44(2), pp. 7, 2012.
Franke, N., Shah, S., 2003. How communities support
innovative activities: an exploration of assistance and
sharing among end-users. Journal of Research Policy,
Vol. 32(1), pp. 157-179.
Friedman, B., Kahn, P. H., and Hagman, J., 2003.
Hardware companions?: what online AIBO discussion
forums reveal about the human-robotic relationship.
Proceedings of the SIGCHI Conference on Human
Factors in Computing Systems, pp. 273-280.
Hart, D., Goertzel, B., 2008. OpenCog: A Software
Framework for Integrative Artificial General
Intelligence. Proceedings of the First AGI Conference,
pp. 468-472.
Hibbard, B., 2008. Open Source AI. Frontiers in Artificial
Intelligence and Applications, pp. 473-477.
Iizuka, H., Ikegami, T., 2004. Adaptability and diversity in
simulated turn-taking behavior. Journal of Artificial
Life, Vol. 10(4), pp. 361-378.
Kahn, P. H., Freier, N. G., Friedman, B., Severson, R. L.,
and Feldman, E. N., 2004. Social and moral
relationships with robotic others?. 13th IEEE
International Workshop on Robot and Human
Interactive Communication (ROMAN), pp. 545–550.
Kertész, C., 2010. A synchronized system concept and a
reference implementation for a robot dog. 14th Finnish
Artificial Intelligence Conference (STeP), pp. 46-53.
Kertész, C., 2012. Dynamic behavior network. IEEE 10th
Jubilee International Symposium on Applied Machine
Intelligence and Informatics (SAMI), pp. 207-212.
Kertész, C., 2013. Improvements in the native development
environment for Sony AIBO. International Journal of
Interactive Multimedia and Artificial Intelligence
(IJIMAI), Special Issue on Improvements in
Information Systems and Technologies, Vol. 2, No. 3,
pp. 50-54.
Kertész, C., 2014. Exploring Surface Detection for a
Quadruped Robot in Households. 14th IEEE
International Conference on Autonomous Robot
Systems and Competitions (IEEE-ICARSC 2014), pp.
152-157.
King, D. E., 2009. Dlib-ml: A Machine Learning Toolkit,
Journal of Machine Learning Research. Vol. 10, pp.
1755-1758.
Krafft, F. M., 2005. Workflow in distributed volunteer
projects — Intuitive approaches to modern Debian
package development. PhD Thesis, University of
Limerick, Ireland.
Nao, 2011. NAO Open Source – ALDEBARAN Robotics
shares source code with its community. Aldebaran
Robotics, Press Release.
Ponsen, M. J. V., Lee-Urban, S., Muñoz-Avila, H., Aha, D.
W., and Molineaux, M., 2005. Stratagus: An Open-
Source Game Engine for Research in Real-Time
Strategy Games. IJCAI Workshop on Reasoning,
Representation and Learning in Computer Games.
Porter, A., Yilmaz, C., Memon, A. M., Krishna, A. S.,
Schmidt, D. C., and Gokhale, A., 2006. Techniques
and processes for improving the quality and
performance of opensource software. Journal of
Software Process: Improvement and Practice, Vol.
11(2), pp. 163-176.
Schaeling, B., 2014. The Boost C++ Libraries. Second
Edition, XML Press.
Simpson, R., Page, K. R., and Roure, D. D., 2014.
Zooniverse: Observing the World’s Largest Citizen
Science Platform. Proceedings of the 23rd
International Conference on World Wide Web, pp.
1049-1054.
Von Hippel, E., Katz, R., 2002. Shifting Innovation to
Users via Toolkits. Journal of Management Science ,
Vol. 48(7), pp. 1-13.
Yan, J., Wang, X., 2013. From Open Source to
Commercial Software Development - the Community
Based Software Development Model. Proceedings of
34th International Conference on Information
Systems, pp. 1-20.
ICINCO2015-DoctoralConsortium
10
