On Routine Evolution of New Replicating Structures in Cellular
Automata
Michal Bidlo
Brno University of Technology, Faculty of Information Technology, IT4Innovations Centre of Excellence,
Bo
ˇ
zet
ˇ
echova 2, 61266, Brno, Czech Republic
Keywords:
Genetic Algorithm, Cellular Automaton, Transition Function, Conditional Rule, Replicating Loop.
Abstract:
This paper presents evolutionary design of two-dimensional, uniform cellular automata. The problem of repli-
cating loops is considered as a case study. Conditionally matching rules are used as a technique that is suitable
to the design of cellular automata state transition rules. A genetic algorithm is applied to the design of cellular
automata that satisfy the requirements of replicating loops. It is shown that such evolution is able to find
various state transition rules that support replication of a given loop. Results presented herein demonstrate the
ability of derived cellular automata to perform replication not only from an initial instance of the loop but also,
that from a seed the loop can autonomously grow.
1 INTRODUCTION
Since the introduction of cellular automata (CA) in
(von Neumann, 1966), researchers have dealt, among
others, how to effectively design a cellular automa-
ton (and its transition function in particular) to solve
various problems. For example, cellular automata
have been studied for their ability to perform com-
putations, e.g. using principles from the famous Con-
way’s Game of Life (Berlekamp et al., 2004) or by
simulating elementary logic functions in non-uniform
cellular matrix (Sipper, 1995).
One of the topics widely studied in the area of ar-
tificial life is the problem of (self-)replicating loops.
Since the introduction of probably the most known
loop by Langton (Langton, 1984), which is able to
replicate in 151 steps in a CA working with 8 states,
some other researchers have dealt with this topic try-
ing to simplify the replication process or enhance the
abilities of the loop during replication. For example,
Byl introduced a smaller loop that is able to replicate
in 25 steps using a CA that works with 6 cell states
(Byl, 1989). Later, several unsheathed loops were
proposed by Reggia et al. from which the simplest
loop consists of 6 cells only and is able to replicate
using 8-state CA in 14 steps (Reggia et al., 1993). On
the other hand, Tempesti studied a possibility to intro-
duce construction capabilities into the loops and pro-
posed a 10-state CA that allows to generate patters in-
side the replicating structures (Tempesti, 1995). Per-
rier et al. created a “self-reproducing universal com-
puter” using 64-state CA by “attaching” executable
programs (Turing Machines) on the loops (Perrier
et al., 1996). Although the aforementioned solutions
were achieved using analytic methods, the process of
determining suitable transition rules for a given prob-
lem represents a difficult task and requires an expe-
rienced designer (the process of “programming” the
CA is not intuitive). As the number of cell states in-
creases, the process of the CA design becomes chal-
lenging due to a significant increase of the solution
space. Moreover, for some problems no analytic ap-
proach has yet been known to the design of the tran-
sition rules. In such cases various unconventional
techniques have been applied including Genetic Al-
gorithm (GA) (Holland, 1975)), possibly in combina-
tion with other heuristics.
For example, Mitchell et al. investigated a prob-
lem of performing computations in cellular automata
using GA (Mitchell et al., 1993). Their work con-
tains a comparison with the original results obtained
by Packard in (Packard, 1988) which can be consid-
ered as a milestone in applying evolutionary algo-
rithms (EA) to the design and optimisation of cellular
automata. In particular, the authors in (Mitchell et al.,
1993) claim: “Our experiment produced quite differ-
ent results, and we suggest that the interpretation of
the original results is not correct.” It may indicate
that the research of cellular automata (and their typ-
ical features like emergent behaviour or cooperative
28
Bidlo, M..
On Routine Evolution of New Replicating Structures in Cellular Automata.
In Proceedings of the 7th International Joint Conference on Computational Intelligence (IJCCI 2015) - Volume 1: ECTA, pages 28-38
ISBN: 978-989-758-157-1
Copyright
c
2015 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
cell signalling by means of local rules) using various
computing techniques can provide valuable informa-
tion for advanced studies and applications in this area.
Note that Mitchell et al. considered binary (i.e. 2-
state) 1D cellular automata only which represent a
fundamental concept for advanced models. Sipper
proposed a technique called Cellular Programming
(a spatially distributed and locally interacting GA)
that allows for the automatic design of non-uniform
CA that are well suited to various problems (Sipper,
1997). Sapin et al. introduced a GA-based approach
to the design of gliders and glider guns in 2D cel-
lular automata (Sapin and Bull, 2008)(Sapin et al.,
2010). It was shown that a spontaneous emergence of
glider guns in CA can occur with a significant number
of new gun-based and glider structures discovered by
EA. The aim of the glider research was to construct a
system for collision-based computationally universal
cellular automata that are able to simulate Turing ma-
chines (Sapin and Bull, 2008). In recent years, several
solutions emerged that aim to optimize the CA de-
sign by introducing various evolution-based and soft-
computing techniques in combination with suitable
representations of the transition functions. For ex-
ample, Elmenreich et al. proposed an original tech-
nique for the calculation of the transition function us-
ing neural networks (NN) (Elmenreich and Feh
´
erv
´
ari,
2011). The goal was to train the NN by means of Evo-
lutionary Programming (Fogel et al., 1966) in order to
develop self-organising structures in the CA. Condi-
tionally Matching Rules (CMR) are a representation
of the transition rules, and were introduced, together
with some early results related to binary CA, in (Bidlo
and Vasicek, 2013) and (Bidlo, 2014).
Whilst the most of the aforementioned studies
considered binary CA (i.e. those working with two
cell states only), that may be suitable for straightfor-
ward hardware implementations (e.g. Sipper’s Fire-
fly machine (Sipper et al., 1997)), multi-state CA can
provide a more efficient way for the representation
and processing of the information thanks to the abil-
ity of the cells to work with more than two states.
This feature is important for studying complex sys-
tems that are in most cases described by integer (or
real-valued) variables. In addition, the introduction
of more than two states per cell in the CA may allow
to reduce the resources needed to solve a given prob-
lem (e.g. the size of the cellular array or dimension
of the automaton). For example, Yun
`
es studied com-
putational universality in multi-state one-dimensional
cellular automata (Yun
`
es, 2010). A technique for the
construction of computing systems in 2D CA was
demonstrated by Stefano and Navarra in (Stefano and
Navarra, 2012) using rules of a simple game called
Scintillae working with 6 cell states. Their approach
allows to design components (building blocks) for the
construction of bigger systems, e.g. on the basis of
gate-level circuits.
The goal of this paper is to demonstrate an ability
of the CMR approach to automatically design tran-
sition rules for CA that support replication of given
structures in uniform, multi-state 2D array. A genetic
algorithm will be applied in order to discover suitable
transition rules that perform replication of the given
loop-like structure according to the designer’s speci-
fication. It will be shown that novel replication sce-
narios can be found in CA that can copy the given
loop not only from its initial instance but also, from a
seed the loop can autonomously grow.
2 FUNDAMENTALS OF
CELLULAR AUTOMATA
The original concept of cellular automaton introduced
in (von Neumann, 1966), that will be considered in
this paper, assumes a 2D matrix of cells, each of
which at a given moment acquires a state from a fi-
nite set of states. The development of the CA is
performed synchronously in discrete iterations (time
steps) by updating the cell states according to local
transition functions of the cells. Uniform cellular au-
tomata will be investigated in which the local transi-
tion function is identical for all cells and hence it can
be considered as a transition function of the CA. The
next state of each cell depends on the combination of
states in its neighbourhood. In this paper von Neu-
mann neighbourhood will be assumed that includes a
given (Central) cell to be updated and its immediate
neighbours in the North, South, East and West direc-
tion (i.e. it is a case of a 5-cell neighbourhood).
Since the CA behaviour can practically be evalu-
ated in the cellular array of a finite size, boundary con-
ditions need to be specified in order to correctly de-
termine cell states at the edge of the array. In this pa-
per, cyclic boundary conditions will be implemented
which means that cells at an edge of the CA are “con-
nected” to the appropriate cells on the opposite edge
(i.e. these cells are considered as neighbours) in each
dimension. In case of the 2D CA the shape of such
cellular array can be viewed as a toroid.
The transition function is usually defined as a
mapping that for all possible combinations of states
in the cellular neighbourhood determines a new state.
This mapping can be represented as a set of rules of
the form N
t
W
t
C
t
E
t
S
t
→ C
t+1
where N
t
, W
t
, C
t
, E
t
and
S
t
denote cell states in the defined neighbourhood at
a time t and C
t+1
is the new state of the cell to be up-
On Routine Evolution of New Replicating Structures in Cellular Automata
29

dated. It means that for every possible combination of
states N
t
W
t
C
t
E
t
S
t
a new state C
t+1
needs to be spec-
ified. However, if the number of cell states increases,
the number of possible transition rules grows signifi-
cantly which is inconvenient for efficient CA design.
Of course, not all transition rules need to be specified
explicitly but the problem is how to choose the rules
which modify the central cell in the neighbourhood.
Therefore, an advanced representation of the transi-
tion rules was proposed and denominated as Condi-
tionally Matching Rules (Bidlo and Vasicek, 2013).
Conditionally matching rules allows us to reduce the
size of representation of the transition functions espe-
cially with respect to the evolutionary design of cellu-
lar automata.
3 CONDITIONALLY MATCHING
RULES
The concept of conditionally matching rules showed
as a very promising technique in comparison with the
conventional (table-based) approach considering var-
ious experiments with binary cellular automata (e.g.
pattern development task (Bidlo and Vasicek, 2013)
or binary multiplication in 2D CA (Bidlo, 2014)). In
this paper, evolutionary design of the CMR-based rep-
resentation will be investigated in order to design cel-
lular automata with up to 10 cell states that support
replication of a given structure.
A conditionally matching rule represents a gener-
alised rule of a transition function for determining a
new cell state. Whilst the common approach specifies
a new state for every given combination of states in
the cellular neighbourhood, the CMR-based approach
allows to encode a wider range of combinations into
a single rule. A CMR is composed of two parts: a
condition part and a new state. The number of items
(size) of the condition part corresponds to the number
of cells in the cellular neighbourhood. Let us define a
condition item as an ordered pair consisting of a con-
dition function and a state value. The condition func-
tion is typically expressed as a function whose result
can be interpreted as either true or false. The condi-
tion function evaluates the state value in the condition
item with respect to the state of the appropriate cell in
the cellular neighbourhood. In particular, each item
of the condition part is associated with a cell in the
neighbourhood with respect to which the condition is
evaluated. If the result of such evaluation is true, then
the condition item is said to match with the state of
the appropriate cell in the neighbourhood. In order to
determine a new cell state according to a given CMR,
all its condition items must match (in such case the
CMR is said to match).
The following condition functions will be consid-
ered: == 0, 6= 0, ≤, ≥. Note that this condition set
represents a result of our long-term experimentation
and experience with the CMR approach and will be
used for all the experiments in this paper. The condi-
tion == 0, respective 6= 0, evaluates whether the cor-
responding cell state is equal to 0 (i.e. a “dead” state),
respective whether it is different from state 0. Note
that the state value of the condition item for == 0
and 6= 0 is considered implicitly within the condition
itself. The conditions ≤ and ≥ represent relational
operators “less or equal” and “greater or equal” re-
spectively for which the state value of the condition
item must be explicitly specified.
Figure 1 shows an example of conditionally
matching rules defined for a 2D CA with the 5-cell
neighbourhood together with the illustration of cells
the condition items are related to. CMR (A) is a
matching CMR since all the conditions of its condi-
tion part are evaluated as true with respect to the sam-
ple neighbourhood shown in the left part of Fig. 1.
On the other hand, CMR (B) does not match because
the second condition item ! = 2 evaluates as false with
respect to the west cell that possesses state 2. Simi-
larly, the third condition == 0 of CMR (B) is not true
as the central cell is in state 2.
2
>=
1
==
2
not-
is0
/=
2
is0
1
3
2
1
0
==
1
!=
2
is0 /=
2
<=
1
3
(A)
(B)
Figure 1: Example of a conditionally matching rule speci-
fied for 5-cell neighbourhood. The value of the new state is
written in bold. (A) example of a matching CMR, (B) ex-
ample of a CMR that does not match – the second and third
condition is evaluated as false.
A CMR-based transition function can be specified
as a finite (ordered) sequence of conditionally match-
ing rules. The following algorithm will be applied
to determine a new state of a cell. The CMRs are
evaluated sequentially one by one. The first matching
CMR in the sequence is used to determine the new
state. If no of the CMRs matches, then the cell keeps
its current state. These conventions for evaluating and
applying the CMRs ensure that the process of calcu-
lating the new state is deterministic (it is assumed that
the condition functions are deterministic too). There-
fore, it is possible to convert the CMR-based tran-
sition function to a corresponding table-based repre-
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
30

Figure 2: Structure of a chromosome for genetic algorithm encoding a CMR-based transition function. cx denote a condition
for the cell at position x in the neighbourhood, sx represents the state value to be investigated using the appropriate condition
with respect to the state of cell at position x, ns specifies the next state for a given CMR. All the conditions and state values
are represented by integer numbers.
sentation which preserves the fundamental concept of
cellular automata. Moreover, every condition set that
includes relation == allows to formulate transition
rules for specific combinations of states if needed (by
specifying == for all condition items of the CMR).
In order to obtain the conventional (table-based)
representation of the transition rules from an evolved
CMR-based solution, the following algorithm is ap-
plied using the same CA that was considered dur-
ing evolution. Let C
t
and C
t+1
denote states of a
cell in two successive steps of the CA at time t
and t + 1 respectively. A transition rule of the form
N
t
W
t
C
t
E
t
S
t
→ C
t+1
is generated for the combination
of states in the cellular neighbourhood if C
t
6= C
t+1
.
This process is performed after each step and for each
cell until the CA reaches a stable or periodic state.
The set of rules obtained from this process repre-
sents the corresponding conventional prescription of
the transition function. Note that only the rules that
modify the cell state are generated, all the other rules
are implicitly considered to preserve the current state.
4 EVOLUTIONARY SYSTEM
SETUP
A genetic algorithm is utilized for the evolution of
CMR-based transition functions in order to achieve
the given behaviour in cellular automata. Each chro-
mosome of the GA represents a candidate transition
function encoded as a finite sequence of CMRs. The
chromosome is implemented as a vector of integers
in which the condition items and next states of the
CMRs are encoded. Note that the population con-
sists of chromosomes of a uniform length (given by
the number of CMRs) which is specified as a parame-
ter for a specific experiment. The structure of a chro-
mosome is depicted in Figure 2.
The population of the GA consists of 8 chromo-
somes that are initialised randomly at the beginning
of the evolutionary process. In each generation, four
individuals are selected randomly from the current
population, the best one of which is considered as a
parent. In order to generate an offspring, the par-
ent undergoes a process of mutation as follows. A
random integer M in range from 0 to 2 is generated.
Then M random positions in the parent chromosome
are selected. The offspring is created by replacing
the original integers at these positions by new valid
randomly generated values. If M equals 0, then no
mutation is performed and the offspring is identical
to the parent. The process of selection and mutation
is repeated until the entire new population is created.
Crossover is not applied because no benefit of this
operator was observed during the initial experiments.
Note that the same GA has successfully been applied
since the introduction of CMRs in various case studies
(Bidlo and Vasicek, 2013)(Bidlo, 2014). Although no
optimal (evolutionary) approach has yet been known
for uniform CA, our experiments indicate that small-
population EA (i.e. less than 10 individuals) with
a simple mutation operator may represent a suitable
class of algorithms to obtain working solutions with
a reasonable success rate and computational effort.
However, the detailed analysis and wider comparison
of different techniques is not a subject of this paper.
For each experiment, the GA is executed for 4 mil-
lions of generations. If no correct solution is found
within this limit, the evolution is terminated. The
evaluation of the chromosomes (i.e. the fitness func-
tion) and details regarding various experimental set-
tings are described in the next section.
5 EXPERIMENTAL RESULTS
This section summarises statistics of the performed
evolutionary experiments and presents some results
Figure 3: Structure of the replicating loop and cellular au-
tomaton of the size that was evaluated in the evolutionary
experiments: (a) the initial CA state containing the loop to
be replicated, (b) the target state specifying the replica ar-
rangement.
On Routine Evolution of New Replicating Structures in Cellular Automata
31
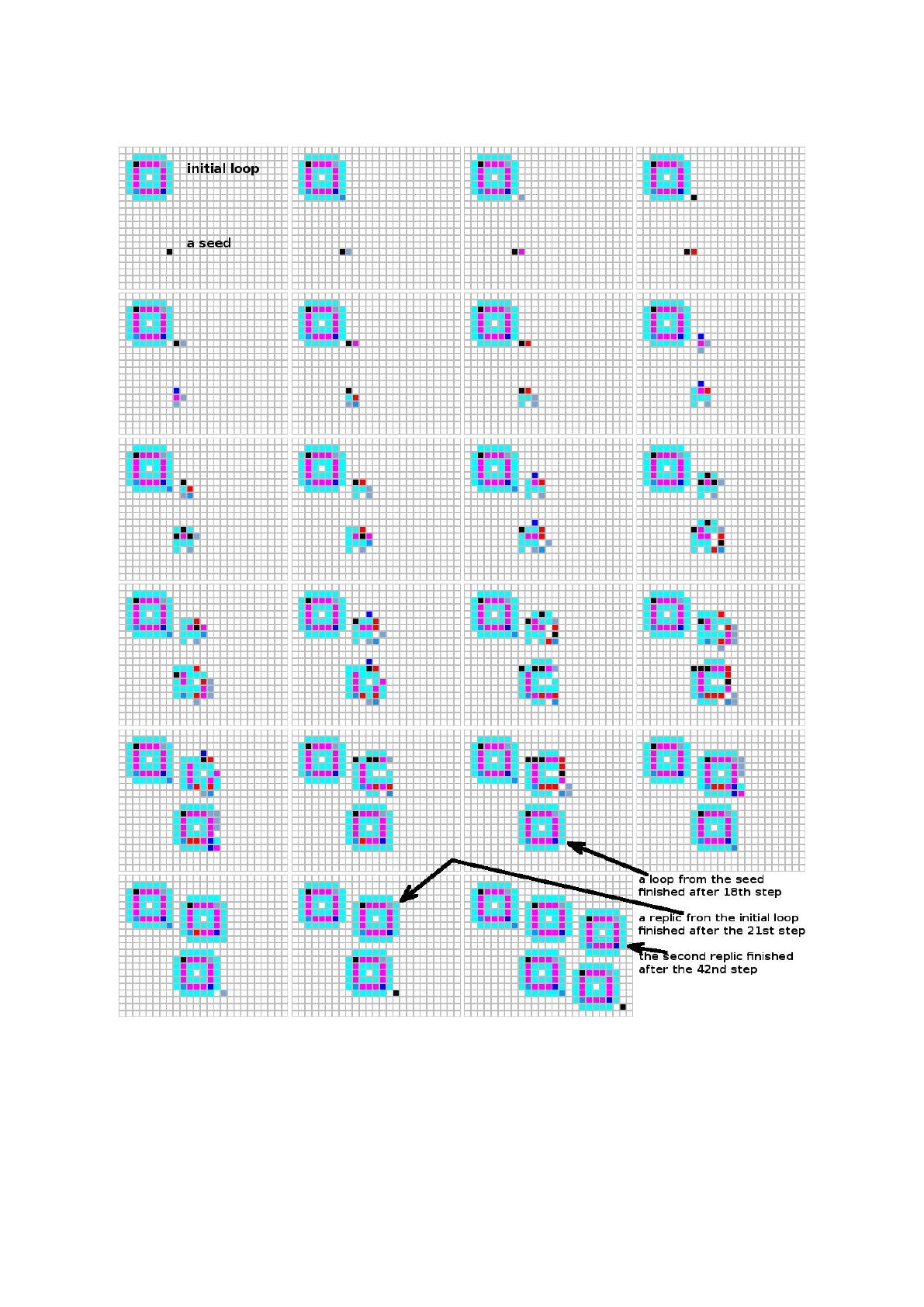
Figure 4: Development of a CA performing replication of the loop from Figure 3. The sequence of steps reads from left to
right and top to bottom. The upper part of each step of the CA illustrates the replication of the initial loop. The bottom part
demonstrates a seed represented by a cell in state 5. Note that after the loop is finished, its replication continues in the same
way as from the initial instance (shown by the last CA state).
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
32

together with a more detailed analysis. Two sets of
experiments are considered in which the CA works
with 8 and 10 cell states. Moreover, different num-
bers of CMRs (varying from 20 to 50) encoded in the
GA chromosomes are considered. For each setup 100
independent evolutionary runs are executed. The ex-
periments were executed using the Anselm cluster
1
,
the time of a single run (4 millions of generations) is
approximately 12 hours.
A replicating loop is considered whose structure
consists of 6 different non-zero states as shown in
Figure 3a. The genetic algorithm is applied to the
design of a transition function for the CA that per-
forms the replication of the loop in a maximum of
30 steps. The required CA state, that contains the
replica, is depicted in Figure 3b. The following al-
gorithm is considered in order to evaluate the candi-
date solutions during evolution and calculate the fit-
ness function. A partial fitness function is evaluated
after each CA step as the number of cells in correct
states with respect to Figure 3b. The final fitness value
of a given candidate solution is defined as the maxi-
mum of the partial fitness values. It this case the repli-
cation can be considered as a pattern transformation
problem from a single (initial) loop onto two loops in
a given arrangement. However, the loop is required
to be able to replicate again and again during the sub-
sequent CA development. Moreover, an assumption
is considered that each newly created loop is shifted
by two cells down with respect to its predecessor (as
shown in Fig. 3b). Therefore, the obtained solutions
are further investigated using a visual software simu-
lator developed by the author of this paper in order to
check that. The goal of this approach is to determine
whether the GA is able to discover various new gen-
eral replication scenarios. Note that for the purposes
of this paper the term “general” means an ability of
a solution to repeatedly produce more replicas of the
given loop, not an ability to replicate arbitrary loops.
Table 1 summarises results of the evolutionary ex-
periments and provides an overview of some basic pa-
rameters of the CA that can be observed during its de-
velopment using the evolved transition functions. As
evident, the maximum success rate achieved during
the experiments is only 12% which is not very high.
Note, however, that the replication of the proposed
loop represents a problem for which no working solu-
tion was found during our previous experiments using
the table-based transition functions. More research
is needed in order to optimise the evolutionary algo-
rithm for this class of problems.
In addition to the results obtained for the CA
1
https://docs.it4i.cz/anselm-cluster-documentation/
hardware-overview
working with 8 cell states, some successful solutions
have even been obtained for 10 cell states which in-
dicates that the CMRs are an efficient encoding of
the transition rules that allows for the design of more
complex multi-state CA. The solutions obtained in
this paper demonstrate a wide range of various repli-
cation schemes that can be performed using CA. For
example, a solution was found that is able to repli-
cate the loop in 16 steps (the best solution of this pa-
per) whilst some CA require 30 steps (the maximal
allowed number of steps) in order to finish the repli-
cation. Similarly, the number of transition rules gen-
erated from the CMRs varies from 84 to more than
1500 rules. These results indicate that cellular au-
tomata can in some cases exhibit behaviour that has
not yet been discovered which may be beneficial not
only for the area of CA but also, for the study of com-
plex systems in general.
Figure 4 shows a CA development performed by
one of the successful transition functions obtained for
the replication of the given loop. It is one of the best
solutions discovered in this paper with respect to the
number of steps needed to create a copy of the loop.
The transition function was found with 30 CMRs in
the GA chromosomes and the corresponding conven-
tional representation contains 238 transition rules. If
the development of the initial loop is considered (see
the upper parts of each step in Figure 4), the CA needs
21 steps to create a complete replica. As shown by
the last step, more replicas can be created in the same
way according to the original specification if the CA
development continues. However, a more detailed in-
vestigation of this result showed that the complete ini-
tial loop is not strictly needed in order to successfully
perform the replication. For example, the loop is able
to emerge even from a single seed – the lower parts of
each step presented in Figure 4 shows a development
of the loop from a single initial cell (a seed) in state
5. As marked by the up-most black arrow a complete
loop is developed from the seed after 18 steps which
is by 3 steps faster compared to the development from
the initial loop. This behaviour is caused by a need of
the initial loop to generate a cell in state 5 (i.e. the
same state as the seed) from which the replica can
be developed (it takes 3 steps – see the top-right CA
state in Figure 4). The process of finishing the replica
is identical with the development from the seed. Note
that the ability of the transition function to develop
and replicate the loop from a seed was not required in
the fitness function. Hence it can be considered as an
additional feature of the evolved solution. However,
it is not a common behaviour because only a few of
the obtained transition functions are capable to do it.
Another result is presented in the form of an
On Routine Evolution of New Replicating Structures in Cellular Automata
33

Table 1: Results of the evolutionary experiments considering the design of transition functions for the replication of the loop
from Figure 3a. Success rate – the number of successful experiments out of 100 independent experiments performed that
has met the fitness specification in a limit of 4 millions of generations, Replicates repeatedly – the number of results from
the successful experiments that are able to produce more replicas during the subsequent CA development, Min. steps – the
minimal number of steps of the CA needed to create the replica (i.e. the lowest value of this parameter from the group of
“Replicates repeatedly” solutions, Min. rules – the minimal number of table-based transition rules obtained (i.e. the lowest
value of this parameter from the group of “Replicates repeatedly” solutions.
CA with 8 cell states CA with 10 cell states
Num. of Success Replicates Min. Min. Success Replicates Min. Min.
CMRs rate [%] repeatedly steps rules rate repeatedly steps rules
20 0 - - - 1 0 - -
30 10 6 19 84 12 9 21 146
40 9 4 20 139 12 6 16 186
50 10 6 18 130 12 6 21 177
>=6;>=1;>=3;==0;>=1|7 ==0;>=4;<=0;==0;!=0|1 N W C E S C N W C E S C N W C E S C N W C E S C N W C E S C N W C E S C
>=0;<=3;>=0;<=0;>=3|1 <=2;==0;==0;<=2;>=1|3 0 0 0 0 3 1 1 0 7 2 1 1 1 2 7 7 7 1 1 7 7 0 0 4 4 2 3 0 4 1 7 1 3 0 4 7
==0;==0;==0;>=3;!=0|6 >=7;==0;>=6;>=6;<=2|2 0 0 0 0 7 1 1 0 7 2 7 1 1 3 1 0 0 6 1 7 7 0 3 2 4 2 7 0 3 1 7 2 0 0 3 1
<=1;!=0;<=1;>=5;<=1|0 <=5;!=0;>=7;!=0;<=0|7 0 0 1 1 0 0 1 0 7 7 1 1 1 3 6 0 0 7 1 7 7 3 0 6 4 7 0 0 0 3 7 2 6 0 0 0
==0;!=0;>=3;<=2;!=0|5 >=0;==0;==0;!=0;!=0|1 0 1 0 0 2 7 1 0 7 7 7 1 1 3 6 7 1 1 2 1 3 0 0 1 4 7 3 0 0 7 7 4 3 0 0 0
>=4;>=0;>=7;==0;>=2|6 !=0;!=0;==0;==0;==0|3 0 1 0 0 4 1 1 1 0 0 3 1 1 3 7 0 3 1 2 1 4 0 1 1 5 0 6 2 5 1 7 6 2 6 1 6
<=7;>=5;!=0;<=4;!=0|2 <=1;<=0;!=0;!=0;>=6|7 0 1 1 1 7 3 1 1 1 7 1 0 1 3 7 4 0 6 2 1 7 3 0 6 6 0 0 0 0 5 7 6 4 4 1 2
<=5;<=3;==0;<=7;<=1|0 ==0;>=4;<=2;<=7;>=6|1 0 1 1 5 0 0 1 1 3 0 0 1 1 4 0 0 0 3 2 5 1 0 0 6 6 0 0 1 0 5 7 6 6 0 1 7
>=3;>=3;!=0;>=0;!=0|6 >=5;>=1;>=1;==0;==0|0 0 1 3 0 0 1 1 1 4 7 1 1 1 4 1 0 0 6 2 6 0 3 3 4 6 0 5 1 0 7 7 7 3 0 0 7
!=0;>=4;<=4;>=5;==0|2 <=7;==0;==0;<=5;<=3|5 0 1 3 1 6 5 1 1 7 4 0 6 1 4 3 0 0 6 2 6 0 4 3 3 6 1 0 0 0 3 7 7 3 0 4 7
<=3;<=1;!=0;==0;<=2|1 !=0;>=5;==0;!=0;!=0|3 0 1 7 0 2 5 1 1 7 7 2 1 1 4 4 0 0 6 2 7 4 1 1 2 6 1 0 0 4 1 7 7 7 0 0 4
==0;>=5;<=3;==0;<=3|4 ==0;==0;==0;>=5;!=0|6 0 2 4 0 1 5 1 2 1 0 0 6 1 4 6 0 0 7 2 7 4 3 5 2 6 1 1 0 0 0
==0;!=0;>=2;==0;!=0|4 ==0;<=3;==0;==0;!=0|7 0 4 0 0 1 1 1 2 3 0 0 6 1 5 5 0 1 2 2 7 6 0 0 4 6 3 0 0 0 3
!=0;>=5;>=6;==0;<=6|4 !=0;==0;>=5;!=0;>=7|3 0 4 4 6 0 2 1 2 4 0 0 6 1 6 0 0 0 3 2 7 7 0 0 4 6 4 3 0 0 0
<=7;==0;>=0;<=2;!=0|1 !=0;<=6;>=5;<=2;<=0|7 0 5 0 0 0 4 1 2 4 0 3 1 1 6 4 0 0 6 2 7 7 0 6 2 6 6 0 0 0 3
>=1;>=7;!=0;==0;==0|7 ==0;<=0;>=0;<=2;==0|0 0 5 0 0 1 4 1 2 4 6 1 2 1 6 4 3 1 2 2 7 7 3 6 2 6 7 0 0 0 3
<=7;>=3;<=6;<=3;>=3|4 ==0;==0;==0;>=2;<=4|5 0 5 1 0 4 2 1 2 4 6 7 2 1 6 4 3 3 2 3 0 4 0 0 1 6 7 3 0 4 7
!=0;!=0;>=6;!=0;==0|6 ==0;>=5;>=0;>=5;>=2|7 0 5 4 0 1 5 1 2 5 5 1 2 1 6 4 4 1 2 3 4 4 0 0 6 7 0 0 0 0 1
==0;==0;>=0;==0;<=3|5 ==0;<=4;==0;>=6;<=2|6 0 6 0 0 0 4 1 2 6 0 0 7 1 6 6 0 0 4 3 5 0 0 0 3 7 0 3 0 0 1
<=1;<=3;>=3;>=7;!=0|1 ==0;<=0;>=1;>=4;==0|2 0 7 0 0 0 4 1 2 6 0 3 1 1 6 6 0 1 2 3 6 0 0 0 3 7 0 5 0 0 7
>=4;<=3;!=0;==0;!=0|2 >=5;==0;==0;<=2;>=6|4 0 7 0 0 1 4 1 2 6 6 1 2 1 6 6 7 1 2 3 7 0 0 0 3 7 1 0 0 0 1
==0;<=0;==0;<=6;<=1|7 !=0;!=0;<=7;>=5;==0|3 0 7 3 0 0 4 1 2 6 7 1 1 1 6 7 0 0 4 3 7 4 0 0 7 7 1 0 0 3 1
>=0;>=5;<=7;>=2;==0|6 !=0;>=2;!=0;==0;==0|6 0 7 4 3 0 6 1 2 7 0 3 1 1 7 0 0 0 3 4 1 0 0 4 1 7 1 1 0 1 2
<=1;>=2;!=0;>=5;<=7|2 <=0;<=2;<=5;!=0;>=7|3 0 7 6 6 3 2 1 2 7 4 0 6 1 7 3 0 0 7 4 1 1 0 2 2 7 1 2 0 6 1
>=7;<=2;==0;<=6;<=1|1 >=6;==0;<=3;<=5;<=1|1 1 0 5 2 6 1 1 2 7 7 0 6 1 7 4 0 0 7 4 1 5 0 0 7 7 1 3 0 0 0
(a) (b)
t t t t t t+1 t t t t t t+1 t t t t t t+1 t t t t t t+1 t t t t t t+1 t t t t t t+1
Figure 5: Transition function for the CA in Fig. 6 and 7: (a) the evolved representation with 50 CMRs, (b) the corresponding
conventional representation consisting of 130 rules. This result represents one of the best solutions discovered in this paper.
evolved transition function (Fig. 5) and the appropri-
ate CA development (Figures 6 and 7). This cellular
automaton demonstrates a development process from
a seed that at first creates rather a chaotic structure
even larger than the required loop itself. A “mature”
loop is developed from this structure during the subse-
quent CA development that is able to replicate itself.
Whilst the replication of the initial loop takes 25 steps
(marked by the black arrow in Figure 6), the develop-
ment of the chaotic structure needs 36 steps. Starting
by step 37 (Fig. 7) the loop is developed from that
structure in the same way as from the initial loop. It
was verified that the loops are able to replicate repeat-
edly if the CA development continues.
For both the presented solutions the transition
function was identified as redundant (i.e. not all
the conventional transition rules generated from the
CMR representation are needed for the replication of
the initial loop required by the fitness function). A
more detailed analysis showed that this redundancy
is caused by the finite CA size with cyclic boundary
conditions and by generating the transition rules from
the CMRs until the CA reaches a stable or periodic
state. Although this approach leads to more complex
table-based transition functions, in this case it showed
as very beneficial for achieving some additional fea-
tures that were not required during evolution (espe-
cially the ability to develop the loops from a seed).
Advanced experiments with the resulting CA showed
that if the transition functions are optimized (i.e. only
the rules for the development of a single replica from
the initial loop are considered), the CA in most cases
loose the ability of the development from the seed.
It was also determined that the seed-based develop-
ment does not work in case of the known replicating
loops (e.g. Langton’s or Byl’s loop). In the future,
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
34
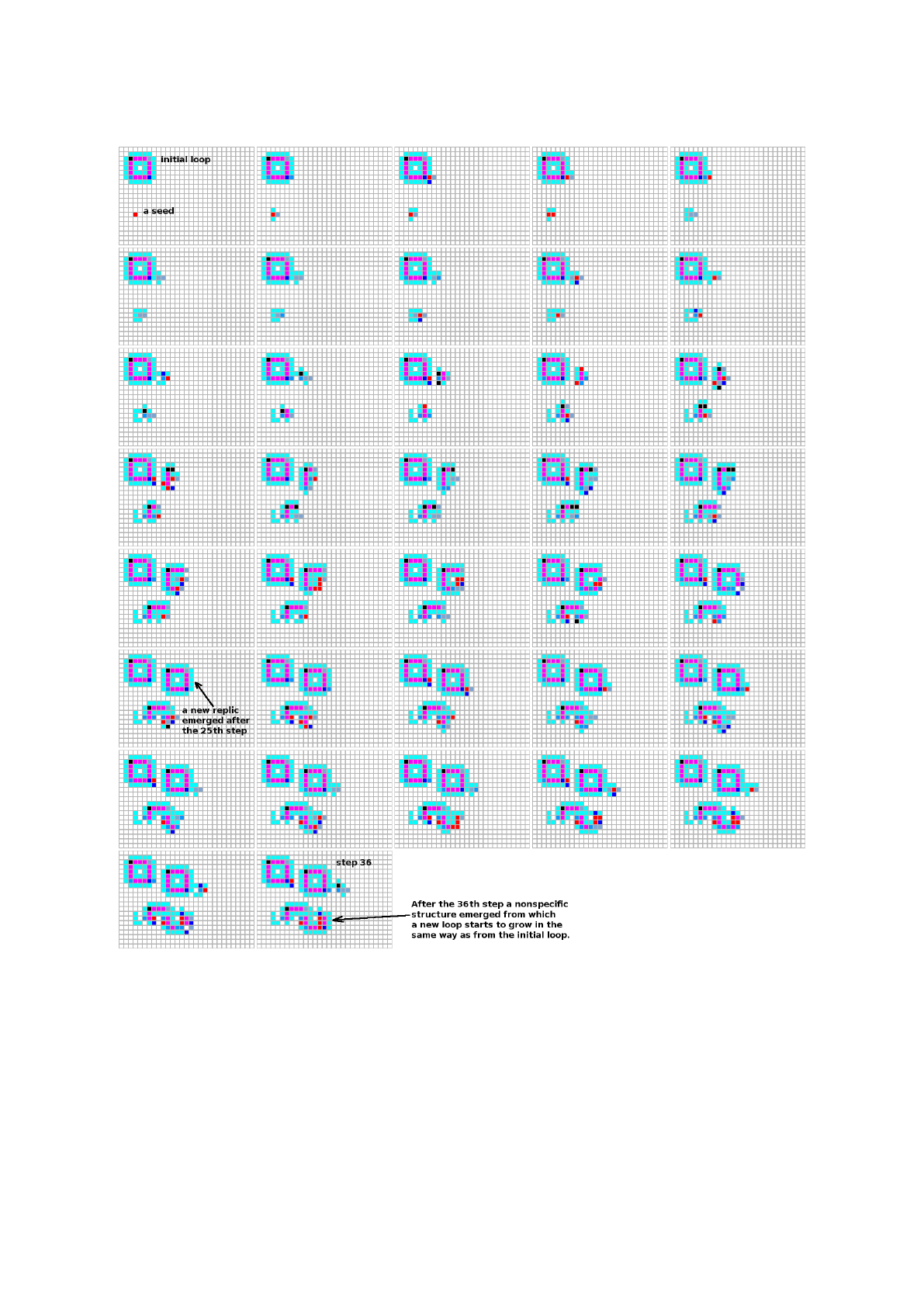
Figure 6: Part 1 of the replication according to the transition function from Figure 5. The sequence of steps reads from left
to right and top to bottom. The development shows a replication of the initial loop (the upper part of each step) and a growth
of a non-specific structure from a seed allowing to create the loop autonomously (the lower part of each step). The seed is
represented by a cell in state 7.
this ability may be beneficial for the advanced study
of complex systems in which a given (complex) con-
figuration needs to be achieved — distributed — from
a single cell or a simple initial configuration. In addi-
tion to the results presented herein, various other so-
lutions were found that are able to replicate a given
structure. It indicates that the replication in CA is not
limited to known schemes only but can be performed
On Routine Evolution of New Replicating Structures in Cellular Automata
35

Figure 7: Part 2 of the replication according to the transition function from Figure 5. The sequence of steps reads from left to
right and top to bottom. The development shows an autonomous growth of the loop from a non-specific structure that emerged
in the last step of Figure 6 (the bottom part of each step). It was verified that the loop is able to replicate in the same way as
the initial loop during the subsequent CA development.
in many different ways.
In order to perform a general evaluation of the ob-
tained results within to the context of computational
features of cellular automata and with respect to the
existing replicating loops, the following issues need
to be clarified:
1. The objective was not to design self-replication.
The loops with the ability to self-replicate contain
the information of how to create a copy encoded
in their “body” as a suitable arrangement of cell
states. The transition rules interpret this informa-
tion and calculate the appropriate state transitions
of the CA in order to perform the replication pro-
cess. In this paper, however, the initial loop is con-
sidered as an object of a given shape that ought to
be transformed onto a CA state that contains the
copy of the loop. The goal was to find both the
transition rules and the sequence of the CA states
that lead to the emergence of the replica.
2. The resulting CA do not represent universal com-
puting models (it was not a goal of the experi-
ments). It means that a specific transition func-
tion, that was obtained as a result of a success-
ful evolution, is dedicated to replicate only the
given loop that was a subject of evaluation in
the fitness function. Nevertheless, as the results
showed, some transition functions are able to cre-
ate the loops from a seed which was not explicitly
required during evolution.
Although the shape of the proposed loop was in-
spired by the existing (self-replicating) loops and the
GA provided some successful results to replicate this
loop, no working solution has yet been achieved by
the GA to replicate the existing loops (e.g. Byl’s loop)
with the exact shape and arrangement of the replicas.
This issue can be caused by the fact that some of the
self-replicating loops are dynamical structures even
after the replica is finished (e.g. Byl’s loop exhibits
such feature). However, only static replicas were con-
sidered in our experiments. Another aspect may be
the size of the loop that requires a higher number of
steps to finish the replica (e.g. Langton’s loop needs
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
36
151 steps) which makes the evaluation of such solu-
tion very time-consuming (it is a case of the prob-
lem of scale during the fitness evaluation). Finally,
the information encoded in the loop body, that spec-
ifies the self-replication features, actually determines
the replication algorithm (i.e. the CA development)
which is specific for the given loop. If no more valid
algorithms exist in the solution space for such loop,
then the GA may not be able to find the solution in a
reasonable time. Despite this issue, the obtained re-
sults bring some open questions whose investigation
could be beneficial for the self-replication as well as
cellular automata in general. For example, can the
seed-based development create a configuration in the
CA that supports self-replication (or other useful fea-
tures)? Are there other (simple) structures that sup-
port development of more complex (self-)replicating
objects? Can evolutionary techniques be applied to
the design of computationally universal CA-based
models? Not only these questions represent ideas for
our future research.
6 CONCLUSIONS
In this paper the evolutionary discovery of new repli-
cation processes was proposed. It was shown that
conditionally matching rules are suitable for a rou-
tine evolutionary design of multi-state CA that per-
form replication of a given loop-like structure. The
experiments provided many different solutions how
the replication of an initial loop can be performed.
In addition, some of the transition functions demon-
strated that the loop can even autonomously grow
from a single-cell seed and subsequently replicate ac-
cording to the original specification. It indicates that
CA may exhibit some features that has not yet been
known and has not been discovered so far using con-
ventional techniques. A disadvantage of the proposed
results may be seen in a low replication speed in com-
parison with some known replicating loops (the so-
lutions presented herein replicate the loop in one di-
rection only). However, optimization of the replica-
tion speed was not a goal of this paper. In general, it
was demonstrated that new techniques of replication
can be discovered automatically for a given loop-like
structure.
ACKNOWLEDGEMENTS
This work was supported by the Czech Science Foun-
dation via the project no. GA14-04197S Advanced
Methods for Evolutionary Design of Complex Dig-
ital Circuits, and the IT4Innovations Centre of Ex-
cellence, no. CZ.1.05/1.1.00/02.0070, funded by the
European Regional Development Fund and the na-
tional budget of the Czech Republic via the Research
and Development for Innovations Operational Pro-
gramme.
REFERENCES
Berlekamp, E. R., Conway, J. H., and Guy, R. K. (2004).
Winning Ways for Your Mathematical Plays, 2nd Ed.,
Volume 4. A K Peters/CRC Press.
Bidlo, M. (2014). Evolving multiplication as emergent be-
havior in cellular automata using conditionally match-
ing rules. In 2014 IEEE Congress on Evolutionary
Computation, pages 2001–2008. IEEE Computational
Intelligence Society.
Bidlo, M. and Vasicek, Z. (2013). Evolution of cellular au-
tomata with conditionally matching rules. In 2013
IEEE Congress on Evolutionary Computation (CEC
2013), pages 1178–1185. IEEE Computer Society.
Byl, J. (1989). Self-reproduction in small cellular automata.
Physica D: Nonlinear Phenomena, 34(1–2):295–299.
Elmenreich, W. and Feh
´
erv
´
ari, I. (2011). Evolving self-
organizing cellular automata based on neural network
genotypes. In Proceedings of the 5th International
Conference on Self-organizing Systems, pages 16–25.
Springer.
Fogel, L. J., Owens, A. J., and Walsh, M. J. (1966). Artifi-
cial Intelligence through Simulated Evolution. Wiley,
New York.
Holland, J. H. (1975). Adaptation in Natural and Artificial
Systems. University of Michigan Press, Ann Arbor.
Langton, C. G. (1984). Self-reproduction in cellular au-
tomata. Physica D: Nonlinear Phenomena, 10(1–
2):135–144.
Mitchell, M., Hraber, P. T., and Crutchfield, J. P. (1993). Re-
visiting the edge of chaos: Evolving cellular automata
to perform computations. Complex Systems, 7(2):89–
130.
Packard, N. H. (1988). Adaptation toward the edge of
chaos. In J. A. S. Kelso, A. J. Mandell, and M. F.
Shlesinger, editors, Dynamic Patterns in Complex Sys-
tems, pages 293–301. World Scientific.
Perrier, J.-Y., Sipper, M., and Zahnd, J. (1996). Toward a
viable, self-reproducing universal computer. Physica
D, 97:335–352.
Reggia, J. A., Armentrout, S. L., Chou, H.-H., and Peng,
Y. (1993). Simple systems that exhibit self-directed
replication. Science, 259(5099):1282–1287.
Sapin, E., Adamatzky, A., Collet, P., and Bull, L. (2010).
Stochastic automated search methods in cellular au-
tomata: the discovery of tens of thousands of glider
guns. Natural Computing, 9(3):513–543.
Sapin, E. and Bull, L. (2008). Searching for glider guns in
cellular automata: Exploring evolutionary and other
On Routine Evolution of New Replicating Structures in Cellular Automata
37
techniques. In Monmarch, N., Talbi, E.-G., Collet,
P., Schoenauer, M., and Lutton, E., editors, Artificial
Evolution, volume 4926 of Lecture Notes in Computer
Science, pages 255–265. Springer Berlin Heidelberg.
Sipper, M. (1995). Quasi-uniform computation-universal
cellular cutomata. In Advances in Artificial Life,
ECAL 1995, Lecture Notes in Computer Science, Vol.
929, pages 544–554. Springer Berlin Heidelberg.
Sipper, M. (1997). Evolution of Parallel Cellular Machines
– The Cellular Programming Approach, Lecture Notes
in Computer Science, Vol. 1194. Springer, Berlin.
Sipper, M., Goeke, M., Mange, D., Stauffer, A., Sanchez,
E., and Tomassini, M. (1997). The firefly machine:
online evolware. In Evolutionary Computation, 1997.,
IEEE International Conference on, pages 181–186.
Stefano, G. D. and Navarra, A. (2012). Scintillae: How to
approach computing systems by means of cellular au-
tomata. In Cellular Automata for Research and Indus-
try, Lecture Notes in Computer Science, Vol. 7495,
pages 534–543. Springer.
Tempesti, G. (1995). A new self-reproducing cellular au-
tomaton capable of construction and computation. In
Advances in Artificial Life, Proc. 3rd European Con-
ference on Artificial Life, Lecture Notes in Artificial
Intelligence, Vol. 929, pages 555–563. Springer.
von Neumann, J. (1966). The Theory of Self-Reproducing
Automata. A. W. Burks (ed.), University of Illinois
Press.
Yun
`
es, J.-B. (2010). Achieving universal computations
on one-dimensional cellular automata. In Cellular
Automata for Research and Industry, Lecture Notes
in Computer Science Volume 6350, pages 660–669.
Springer.
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
38
