A Reward-driven Model of Darwinian Fitness
Jan Teichmann
1
, Eduardo Alonso
2
and Mark Broom
1
1
Department of Mathematics, City University London, London EC1V 0HB, U.K.
2
Department of Computer Science, City University London, London EC1V 0HB, U.K.
Keywords: Darwinian Fitness, Reward, Prey-predator Co-evolution.
Abstract: In this paper we present a model that, based on the principle of total energy balance (similar to energy
conservation in Physics), bridges the gap between Darwinian fitness theories and reward-driven theories of
behaviour. Results show that it is possible to accommodate the reward maximization principle underlying
modern approaches in behavioural reinforcement learning and traditional fitness approaches. Our
framework, presented within a prey-predator model, may have important consequences in the study of
behaviour.
1 INTRODUCTION
In an evolutionary context, models such as optimal
foraging theory (OFT) look at behaviour from the
point of view of maximizing Darwinian fitness (e.g.,
Orr, 2009). On the other hand, the fact that animals
show clear reward driven motivations has been
extensively reported (Barto et al., 1990; Sutton and
Barto, 1998). From the evolutionary perspective
models assume a monotonically increasing
functional relationship between rewards and fitness.
In such a scenario optimization of rewards seems
like a straightforward choice. Nevertheless, the
success of reward mediated learning as an
omnipresent adaptation to the environment can
easily deceive the observer into believing that this
assumption, that animals just optimize rewards, is
generally true (Staddon, 2007), and, very little is still
known about the relationship between behavioural
and genetic traits. To fully understand the evolution
of animal behaviour we require both mechanistic
and functional approaches. The mechanistic
approach tries to quantify the influence of genetic
and environmental factors on the phenotype,
whereas the functional approach tries to describe
how the interaction of phenotypes and their
environment affects fitness. Functional approaches
towards understanding behaviour have received very
little attention (see, for example, Dingemanse and
Réale, 2005). Similarly, it is evident that,
notwithstanding the accomplishments of
computational theories of reinforcement learning in
modelling neural and psychological factors (e.g.,
Dayan and Daw, 2008; Rangel et al., 2008; Schultz,
2008), the use of rewards in this area is a great
simplification of the true nature of rewards
(Teichmann et al., 2014). Although new ways to
enrich the reinforcement learning ontology with
ethological and evolutionary information have been
reported (Alonso et al., 2015), the problem of
integrating reward-driven approaches and fitness
theories has not been tackled so far. It is apparent
that whereas rewards reflect some fitness
component, a general relationship between strength
of rewards and fitness needs to be established.
The question is: is it possible to determine the
fitness component of rewards from the
environmental set-up and the behaviour of
predators? In order to solve this conundrum we have
assumed that predators generally show evolved
behaviour adapted to their environment and that
without the occurrence of new mutants selection is
of a stabilizing nature: the end-result is a stable
system of balanced interactions of co-evolved
predators and all their prey. We use the stability
argument to infer the fitness components of
subjective rewards. The observed environment is
interpreted as an evolutionarily stable snapshot
without the presence of any mutants with fitness
advantages/disadvantages. The resulting model has
been used previously to model the outcome of
reward driven learning (Teichmann, 2014) and the
aim of this paper is to compare the results of reward
driven learned behaviour with the prediction of the
174
Teichmann, J., Alonso, E. and Broom, M..
A Reward-driven Model of Darwinian Fitness.
In Proceedings of the 7th International Joint Conference on Computational Intelligence (IJCCI 2015) - Volume 1: ECTA, pages 174-179
ISBN: 978-989-758-157-1
Copyright
c
2015 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
fitness component of this model assuming energy
balance and evolutionary stability.
2 THE PREDATOR LIFETIME
MODEL
This section introduces the lifetime model of an
individual predator and the definition of the
individual’s fitness based on its interaction with the
environment in the form of payoffs and additional
aspects of its behaviour, metabolism, and lifetime
traits, age specifically.
We model a situation where the predator faces
different types of prey. These are either aposematic,
which are prey with invisible defences (such as
toxins) advertised by a clear signal (such as bright
colouration), or Batesian mimics, which are
undefended. We shall simply refer to the former type
as “models” and the latter as “mimics”. The predator
feeds on prey it encounters, as it cannot distinguish
between models and mimics based on their
appearance. However, the predator has the option to
move around freely in its environment to avoid
encounters with possibly aversive defended prey
based on its experience. Under the assumption of
interim stability without the presence of mutants it
follows that
t
0
dT
dk
Eu
R 0,
(1)
with
t
0
dT
dk
representing the metabolic cost of the
predator as time
T
passes during interaction
k
with
the prey,
Eu
the behavioural expenditure (an
energy related quantity defined as the energetic cost
of behaviour including, amongst others, locomotion
and reproduction), and
R
being the influx of some
fitness quantity from predation. These terms can be
interpreted as a form of energy and, generally,
t
0
dT
dk
0
and
R 0
. If this condition is not met,
and the l.h.s. in Eq (1) is positive, the population of
predators would grow; and if the l.h.s. is negative,
the population of predators would shrink. In a
coupled system of co-evolution this would lead to
changing selective pressure on the prey population,
which is assumed to be stabilizing. For simplicity we
assume that the system has reached a stable point of
balanced interactions between predator and prey.
It must we noted that co-evolutionary dynamical
systems, in particular with multiple prey species, can
have many possible solutions, including cycling and
species extinction as well as a unique equilibrium.
We have focused only on the fitness of the predator,
through Eq. (1), and have not given the equivalent
functions for the different prey species at all. These
could take a wide number of forms. We don’t mean
to imply that under any given prey fitness function
there would be a stable equilibrium; only that there
would be a range of plausible scenarios which would
yield a stable equilibrium, and that we concentrate
on these cases only. In particular, an extreme case
would be if the fitness of the prey does not greatly
depend upon the fitness of our predator (they may
have many predators, others of which are more
numerous, or their mortality will be driven by
internal competition), when the system approximates
to a single species system given by Eq. (1). The
results in the next section will hold for all cases
which yield an equilibrium, but also for cycles of
sufficiently small amplitude. Of course, there can be
systems with species persistence and significant
oscillations where our results do not hold.
The total available prey from the prey population
i
is given by,
G
i
g
i
X,Y
dxdy 2p
i
i ,x
i ,y
y
x
,
(2)
where
is a normalization factor and the dispersion
of each prey population
i
within the environment is
described by a Gaussian function
g
i
X,Y
p
i
exp
X x
i ,0
2
2
i ,x
2
Y y
i ,0
2
2
i ,y
2
,
(3)
with
x
i ,0
, y
i,0
being the centre of the prey
population with density
p
i
, and
i ,x
,
i ,y
the
spread of the prey. The payoff, aka the reward, is
defined as
R G
i
dt
i
r * t
i
2
i
,
(4)
with
r *
being the assumed fitness component of the
payoff,
t
2
the cost incurred by ingesting toxins, and
dt
the probability of ingesting a prey individual
of toxicity
t
after taste sampling as given by
dt
1
1 d
0
t
.
(5)
We assume that
r *
is related to the fitness of the
prey. For example, if fitness is measured in terms of
energy the predator has a high fitness influx from a
prey which also had a great amount of energy
A Reward-driven Model of Darwinian Fitness
175

reserves for reproduction. Moreover, if
r *
relates to
the fitness of the prey this value has to be equal for
different types of prey under the assumption of
stability. If the fitness contribution of a type of prey
would be greater than the fitness of other prey types
it would be advantageous for the predator to feed
exclusively on this prey. It is apparent that fitness in
such an interpretation is not equivalent to the
standard idea of fitness of the number of offspring
surviving to reproductive age. Here
r *
is better
interpreted as an energetic quantity from which
individuals can allocate towards the cost of predator
defences, reproduction, metabolic costs of toxin
ingestion, or behavioural expenditures.
In summary, the fitness component
r *
for a
predator prey interaction with just a single type of
prey is given by
r*
1
Gd
A
Eu
t
0
Gt
0
t
s
dt
2
A
t
0
t
t
t
h
.
(6)
Eq. (6) consists of a scaling factor and the sum of
the predator's behavioural expenditure, its basal
metabolic cost, and the additional costs of foraging
such as the sampling of prey
t
s
, the handling of prey
t
h
, and the recovery from ingested toxins
t
t
.
A
represents the age dependent agility of the predator,
given by
A
1
1
A
.
(7)
In short, we solve Eq. (1) for
r *
by substituting for
R
with the definition in Eq. (6). Consequently,
r *
needs to be higher when (i) a predator feeds on toxic
prey; (ii) when the prey requires lengthy handling;
(iii) prey is rare; (iv) the predator has a high
metabolic rate
t
0
; (v) the predator utilizes costly
behaviour; or (vi) when predators live longer. On the
predator’s side
r *
can be termed the nutritional
value of prey within this context.
If we consider a predator feeding on an
aposematic prey in the presence of a Batesian mimic
the lifetime model needs to be refined to
accommodate the fact that the predator cannot
distinguish between the two prey populations and
has to use experience obtained from previous
exploration. As such both prey populations
experience some levels of predation. Moving to
multiple food sources
i
under the assumption of
stability gives the following condition
0 R
i
t
0
dT
dk
Eu
i
.
(8)
As discussed, we assume that both types of prey
contribute the same value of
r *
whereas the models
allocate parts of their energy inventory towards the
cost of their anti-predator defences and mimics have
to allocate greater amounts towards reproduction to
compensate for higher levels of predation, especially
in the case of predators which are able to taste-
sample their prey. Consequently,
r *
in the model-
mimic system is given as follows:
r*
1
Gd
A
i
Eu
t
0
G
i
t
0
t
s
d
i
t
i
2
A
t
0
t
t,i
t
h,i
i
.
(9)
That is, the case of multiple prey types is a direct
extension of the case of a single prey type in Eq. (6)
where the scaling factor and the outcome of
interaction with the prey is the sum over all the
contributing prey types.
3 RESULTS
The results in Figure 1 show the effects of different
aspects of the lifetime model on the nutritional value
r *
in the context of a single prey type. We see that
increasing prey abundance
reduces the required
nutritional value of prey. Nevertheless, there is a
minimal nutritional value prey must have which
depends on the metabolic rate of the predator
t
0
and
which is independent of the predator’s behavioural
expenditure
Eu
and the prey’s abundance
(Figures 1a and 1b). If prey is rare, the predator’s
behavioural expenditure
Eu
has a much greater
impact on
r *
than its metabolic rate
t
0
. The age
distribution or longevity of predators acts as a
simple multiplicative factor in this context. Figures
1(c) and 1(d) show the effects of prey toxicity t on
the nutritional requirement
r *
. Generally,
increasing prey toxicity t requires higher nutritional
values
r *
for stability. In the case of less toxic prey
the predator’s behavioural expenditure
Eu
again
has a greater impact on
r *
than its metabolic rate.
With increasing prey toxicity the predator’s
metabolic rate has greater impact on
r *
. The age
distribution or longevity of predators acts not just as
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
176
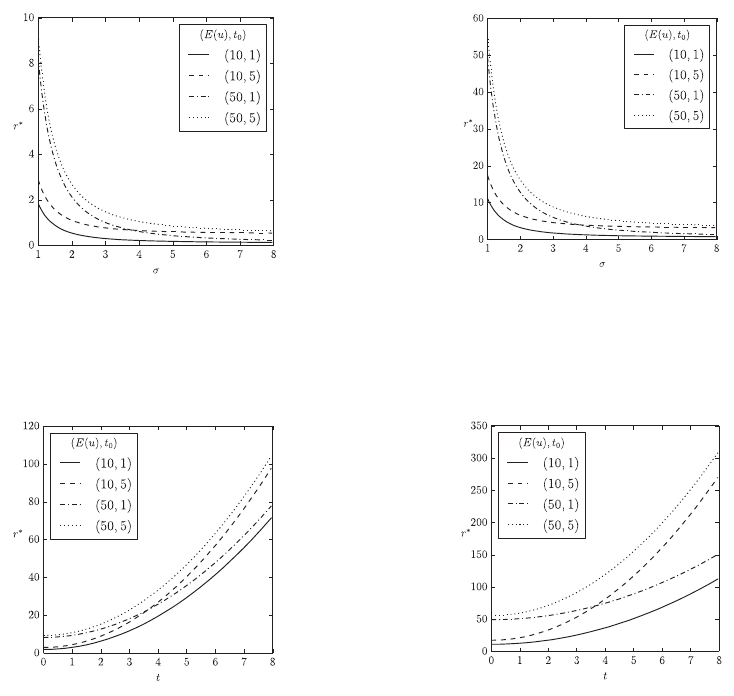
(a) The fitness component
r *
of a single prey type with respect
to the prey population’s abundance
, the predator’s behavioural
costs
Eu
, and the predator’s metabolic rate
t
0
. Hence there is
no ageing, i.e.,
A 0
1
.
(b) The same as 1(a) with age distribution given by
A
5
.
(c) The fitness component
r *
of a single prey type with respect
to the prey population’s toxicity t, the predator’s behavioural costs
Eu
, and the predator’s metabolic rate
t
0
. Here we have
1
, and no ageing,
A 0
1
.
(d) The same as 1(c) with age distribution given by
A 5
.
Figure 1: Effects of a single aposematic prey population on the fitness component
r *
in a stable predator-prey
environment without taste sampling:
dt
1
,
t
s
0
,
t
h
0.1
, and
t
t
0.1
.
a simple factor relating to prey toxicity, as it was the
case in prey abundance.
Figure 2 shows the results of Eq. (9) on the
dependency of different parameters of the model.
The overall prey abundance is held constant in all
charts. Figures 2(a) and 2(b) show the effects of a
second aposematic type of prey in comparison to an
environment with only one aposematic prey type. In
the case that the second aposematic prey is less
(more) toxic than the first prey type it reduces
(increases)
r *
overall. An increasing fraction of the
second prey type amplifies the effects on
r *
.
Additionally, taste sampling also amplifies the effect
of the second prey type on
r *
. However, the impact
of taste sampling is greater if the second prey type is
less toxic than the first prey type. Figures 2(c) and
2(d) show the effects of mimics. Generally, the
presence of mimics lowers
r *
and mimics have an
increasing impact on
r *
with increasing toxicity of
the aposematic model
t
1
. In the case of non-taste-
sampling predators the effect of mimics on
r *
is
linear with respect to the fraction of mimics in the
overall prey population
p
2
.
Taste-sampling generally
increases
r *
and the effect of mimics on
r *
becomes non-linear with increasing impact in the
case of mimics being rare.
A Reward-driven Model of Darwinian Fitness
177
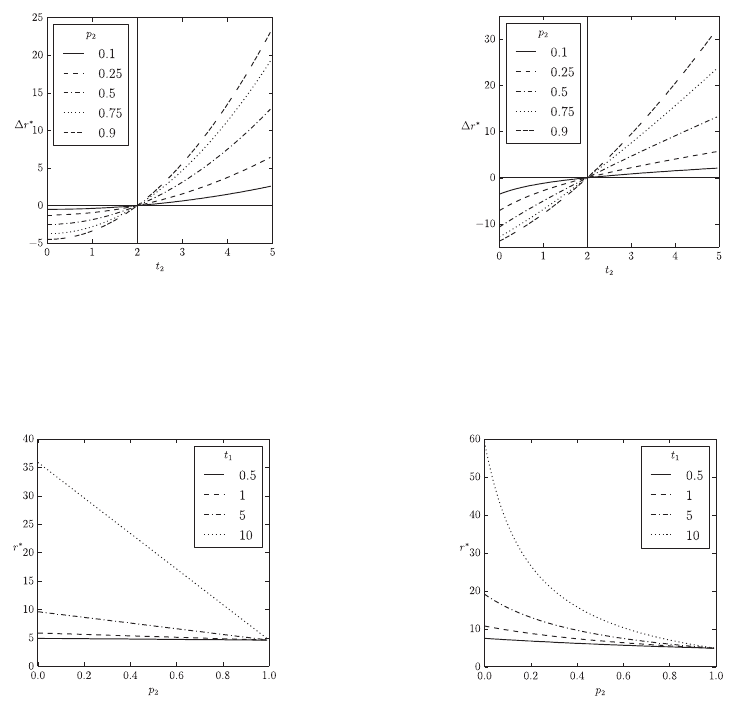
(a) Effects of a second aposematic prey population with respect to
its level of defence
t
2
and density
p
2
. The horizontal line
r* 0
and the vertical line
t
2
2
indicate no differences.
Here there is no taste sampling
dt
1
, with
t
s
0
,
t
1
2
,
and
p
1
1 p
2
.
(b) The same as 2(a) but with taste sampling with
d
0
1
, and
t
s
0.1
,
t
1
2
, and
p
1
1
p
2
.
(c) The effects of mimics within an aposematic prey population
with respect to the mimics density
p
2
and the models toxicity
t
1
. Here there is no taste sampling
dt
1,
and
t
s
0
,
p
1
1 p
2
.
(d) The same as 2(c) but with taste sampling with
d
0
1,
and
t
s
0.1
,
p
1
1
p
2
.
Figure 2: Effects of aposematic prey expressed as the relative change in the fitness component
r *
in a stable predator-
prey environment with multiple prey populations when compared to an environment with a single prey-population. Here
t
h
0.1
,
t
t
0.1
,
t
0
0.25
,
Eu
25
,
A 0
1
, and
1
. The total prey abundance
G
i
i
is held constant.
4 CONCLUSIONS
In this paper we have presented a predator lifetime
model including traits such as metabolic costs,
locomotion, prey handling, and toxin recovery,
which had been abstracted away in the previous
studies of behaviour. The fitness quantity is obtained
by assuming a stabilizing co-evolution between
predator and prey and can be interpreted as a form of
energy. On the predator’s side this might be the
nutritional value of prey and on the prey’s side it
might be interpreted as an energy inventory which
the prey can allocate towards the costs of defence
and reproduction. Aposematic prey allocate a greater
amount towards the cost of its defence whereas the
mimics have to allocate a greater amount towards
their reproduction due to higher predation risks from
experienced predators. The presence of mimics
generally lowers the value of
r *
needed for such a
system to be stable. If models and mimics co-exist
with an unchanged
r *
we predict that the models
will be better defended than in the corresponding
scenarios without mimics.
If mimics and models co-exist but with
unchanged levels of defence then models are
predicted to be smaller and have lower nutritional
value than in a system without mimics. Taste-
sampling as a strategy increases
r *
if mimics are
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
178
rare or if models are only moderately well defended.
However, the impact of taste sampling is non-linear
especially in systems with highly defended models.
In such situations taste-sampling lowers
r *
.
Consequently, under the assumption of a fixed value
for
r *
and stability, a predator evolves a taste-
sampling strategy because mimics are less common
or models are better defended than in a comparable
stable environment where predators do not utilize
taste sampling.
Another interesting aspect is the effect of
different age distributions: in general longevity in
predators increases
r *
. The effects are linear with
regards to prey abundance but non-linear with
regards to prey toxicity where behavioural
expenditure gains increasing impact in the case of
defended prey and older predators, whereas
metabolic costs have an increased impact in the case
of non-defended prey. The main conclusions of this
paper are as follows:
On the predator’s side
r *
is related to the
nutritional value of prey and on the prey’s side
it relates to an energy inventory which can be
allocated, amongst other things, towards the
cost of defences or reproduction;
Behavioural expenditure has a greater impact
than metabolic costs when prey is rare and
undefended;
Metabolic costs have a greater impact when
prey is abundant or highly defended;
Longevity of the predator increases the
importance of behavioural expenditure in the
case of highly defended prey and the impact of
metabolic costs if prey is undefended;
Mimics generally lower
r *
which leads to less
nutritional prey or better defended models if
r *
is meant to be unchanged;
Predators utilize taste sampling if mimics are
rare or models are highly toxic.
REFERENCES
Alonso, E., Fairbank, M., and Mondragón, E. (2015).
Back to optimality: A formal framework to express the
dynamics of learning optimal behavior. Adaptive
Behavior, 23(4), 206-215.
Barto, A.G., Sutton, R.S., and Watkins, C.J.C.H. (1990).
Learning and sequential decision making. In Learning
and Computational Neuroscience: Foundations of
Adaptive Networks, M. Gabriel and J.W. Moore, Eds.,
pp. 539-602, Cambridge, Mass: MIT Press.
Dayan, P., and Daw, N.D. (2008). Decision theory,
reinforcement learning, and the brain, Cognitive,
Affective, & Behavioral Neuroscience 8, 429–453.
Dingemanse, N. J., and Réale, D. (2005). Natural selection
and animal personality, Behavior 142, 1159–1184.
Orr, H. A., (2009). Fitness and its role in evolutionary
genetics. Nature Review Genetics 10, 531-539.
Rangel, A., Camerer, C., and Montague, P.R. (2008). A
framework for studying the neurobiology of value-
based decision making, Nature Reviews Neuroscience
9, 545–556.
Schultz, W. (2008). Neuroeconomics: the promise and the
profit, Philosophical Transactions of the Royal Society
B: Biological Sciences 363, 3767–3769.
Staddon, J.E. (2007). Is animal behavior optimal? In A.
Bejan & G.W. Merkx (eds.) Constructal Theory of
Social Dynamics, NY: Springer.
Sutton, R.S., and Barto, A.G. (1998). Reinforcement
learning: An introduction, Boston, MA: Cambridge
University Press.
Teichmann, J. (2014). Models of aposematism and the role
of aversive learning. PhD dissertation, City University
London, London, UK.
Teichmann, J., Broom, M., and Alonso, E. (2014). The
application of temporal difference learning in optimal
diet models, Journal of Theoretical Biology 340, 11–
16.
A Reward-driven Model of Darwinian Fitness
179
